Изобретение относится к области авиационной техники, а именно к системам управления полетом беспилотных летательных аппаратов (БПЛА) и системам наблюдения за движением в воздушном пространстве.
БПЛА получают все большее распространение в различных областях народного хозяйства и в военной технике. БПЛА применяют для мониторинга и охраны транспортных сетей топливно-энергетического комплекса, патрулирования транспортных магистралей, лесных массивов и охраняемых территорий, для наблюдения за погодными условиями, в разведывательных целях и для аэрофотосъемок. Широко используют БПЛА в деятельности таких ведомств, как ФСБ, МВД, МЧС, Таможенная служба.
Известно большое разнообразие различных БПЛА, отличающихся по назначению, габаритам, массе, скорости, высоте и дальности полета. Они могут совершать полеты, как в верхнем воздушном пространстве, так и в нижнем. В связи с этим актуальной становится проблема обеспечения безопасности полетов, прежде всего, предотвращения непреднамеренных столкновений БПЛА с другими участниками воздушного движения, в том числе с гражданскими воздушными судами (ВС). Как показывает анализ технических решений бортового автономного оборудования БПЛА и наземных средств управления полетом БПЛА, эффективные технические решения указанной проблемы снижения риска опасных сближений и столкновений БПЛА с другими ВС отсутствуют.
Типовая структура управляющего комплекса для БПЛА (www.ruav.ru) состоит из источников данных, в качестве которых используют инерциальные датчики измерения ускорений и угловых скоростей, магнитные датчики, датчики температуры, датчики давления, встроенный GPS-приемник. Полученные данные через блок аналого-цифрового преобразования сигналов попадают в блок бортовой автоматической системы управления (БАСУ), где производится оценка параметров движения объекта и выработка управляющих воздействий на исполнительные механизмы объекта. В качестве входных данных блок системы управления также может принимать внешние управляющие воздействия. Выработанные значения сигналов управления подаются на органы управления полетом БПЛА. В энергонезависимой памяти БАСУ хранятся программы выполнения полета и конфигурации блока управления, изменяющиеся под воздействием определенных событий, происходящих на БПЛА в полете.
Известны система и метод беспроводного управления БПЛА и доступа к данным наблюдения по патенту №WO 2007146538, МПК B64C 39/00; B64C 39/00, опубл. 2007-12-21 (ep.espacenet.com). Система включает в себя наземный пункт управления (НПУ), БПЛА, оборудованный устройствами управления, устройствами передачи и приема информации, а также беспроводную систему связи между БПЛА и НПУ. Метод заключается в том, что беспроводная система связи, ручные устройства ввода, приема и передачи данных (например, сотовый телефон или PDA), а также другие аналогичные технологии используют для связи БПЛА и НПУ, передачи команд управления параметрами полета БПЛА и для получения данных наблюдения с БПЛА. В качестве сети для передачи данных предлагается использовать mobile communications (GSM) network, a general packet radio service (GPRS) network, a code division multiple access (CDMA) network, an evolution-data optimized (EV-DO) network, enhanced data rates for GSM evolution (EDGE) network, a third generation global system for mobile communications (3GSM) network, a digital IS-136/time division multiple access (IS-136/TDMA) network, an integrated digital enhanced network (iDEN).
Аналогу присущ существенный недостаток. Для передачи команд управления в реальном времени требуется широкополосная система радиосвязи, для которой характерны по определению низкие помехозащищенность и помехоустойчивость. Другим недостатком является сложность сбора и передачи полной информации о воздушной обстановке, что неизбежно снижает уровень безопасности полетов.
Наиболее близкими по своей технической сущности к заявленному являются система и метод для безопасных полетов БПЛА в гражданском воздушном пространстве по патенту США №US2008033604, МПК G05D 1/00; G06F 17/00; G05D 1/00; G06F 17/00, опубл. 2008-02-07 (ep.espacenet.com). В состав указанной системы входит наземная станция управления (НСУ), оборудованная устройством визуализации, удаленный пилот-оператор на НСУ и система передачи данных между БПЛА и НСУ.
Метод позволяет пилоту-оператору контролировать полет БПЛА с помощью трехмерного синтезируемого изображения. Во время полета бортовая система БПЛА периодически транслирует свой идентификатор, местоположение, высоту и азимут. По полученным от БПЛА данным в системе визуализации генерируется и отображается на экране монитора обстановка вокруг текущего местоположения БПЛА. Пилот-оператор, анализируя данное изображение, воздействует на органы системы управления полетом, чьи сигналы транслируются обратно на БПЛА. В течение тех фаз полета БПЛА, когда система визуализации не используется для управления, он выполняет полет под управлением бортовой автономной системы. Дополнительно обеспечивается канал связи с системой УВД и пилотами других летательных аппаратов (ЛА), имеющих прямую связь с указанным пилотом-оператором.
Недостаток прототипа состоит в том, что для передачи управляющих сигналов на борт БПЛА от органов управления, на которые воздействует пилот-оператор, требуется широкополосная радиолиния, которая по сравнению с узкополосной линией передачи данных (ЛПД) имеет при той же мощности передатчика меньшую дальность действия, а также низкую помехозащищенность. Другим недостатком является необходимость использования дополнительных каналов передачи данных о воздушной обстановке и для связи с системой УВД и пилотами других ЛА, что снижает уровень надежности и безопасности полетов в воздушном пространстве.
Заявленное техническое решение расширяет арсенал средств данного предназначения.
Цель изобретения состоит в повышении эффективности управления БПЛА и уровня безопасности выполнения полетов в воздушном пространстве путем использования новых информационных технологий сбора, обработки и передачи данных.
Поставленная цель достигается тем, что в известном способе управления одним или несколькими БПЛА, каждый из которых оборудован бортовой автоматической системой управления, спутниковой навигационной системой (СНС), высокоточными синхронизированными часами, а также бортовым вычислителем и приемо-передающей радиостанцией, с помощью которой осуществляется цифровая радиосвязь с базовой радиостанцией, со стационарным или подвижным пунктом управления, оборудованным автоматизированным рабочим местом (АРМ) оператора, передача команд управления движением БПЛА, передача данных о координатах и параметрах его движения, а также передача идентификационных номеров и данных о координатах и параметрах движения других подвижных объектов, оборудованных приемо-передающими радиостанциями и находящихся в пределах радиовидимости, производится в один или несколько общих радиоканалов. Трансляция сообщений каждой передающей радиостанцией производится в заранее заданный отрезок дискретной шкалы единого времени с временным упреждением, которого достаточно для компенсации запаздывания в получении и исполнении указанных команд.
Новым также является то, что команды управления БПЛА содержат навигационные данные об одном или нескольких поворотных пунктах маршрута с указанием их географической широты и долготы, заданных ортодромических путевых углов, величин бокового упреждения разворота, ограничений на величину крена при выполнении разворота, а также заданные значения высоты полета, вертикальной скорости и угла наклона траектории.
Передаваемые на БПЛА команды управления содержат код каждого из заранее определенных маневров в горизонтальной и вертикальной плоскостях, параметры указанного маневра, данные о моменте начала маневра и его окончании. По данным наблюдений вычисляют отклонения от программного движения БПЛА, а в случае, когда указанные отклонения превышают допустимые, вырабатывают и подают в радиоканал дополнительно корректирующие разовые команды, которые формируют таким образом, чтобы уменьшить величину указанных отклонений.
Каждый из участников движения передает в общий канал в заранее заданный интервал времени или по запросу свой идентификационный номер, данные о собственных пространственных координатах, а именно широту, долготу и высоту, параметры собственного движения, а именно собственную путевую скорость, угол пути, угол наклона траектории и вертикальную скорость, а также отсчет момента измерения указанных данных по шкале единого времени.
По данным о текущих координатах и параметрах движения подвижных объектов, которые получены по общему радиоканалу, в пункте управления (ПУ) формируют двух или трехмерное изображение воздушной обстановки на экране монитора АРМ оператора, рассчитывают прогнозируемые траектории всех участников движения, после чего проверяют критерии сближения. При обнаружении прогноза опасного сближения, вырабатывают команды маневра уклонения БПЛА и транслируют их в общий радиоканал.
При наличии требования скрытости и конфиденциальности сообщения о командах управления и данных о координатах и параметрах движения БПЛА перед передачей в общий радиоканал зашифровывают, а на приемном конце дешифруют.
Сообщение, передаваемое бортовой радиостанцией БПЛА содержит данные о параметрах внешней среды, такие как скорость и направление ветра, температуру и атмосферное давление на высоте полета, а также дополнительную информацию о режимах, неисправностях и отказах бортового оборудования.
При вычислении команд управления учитывают динамические характеристики БПЛА, заложенные в память БАСУ алгоритмы, а также внешние возмущения, возможные неисправности и отказы бортового оборудования.
Комплекс управления полетом БПЛА состоит из оборудования стационарного или подвижного ПУ, в состав которого входит АРМ пилота-оператора, включающее в себя антенный блок, соединенный с первым входом транспондера, пульт управления вводом и выводом данных и метеостанция, выходы которых подключены к первому и второму входам формирователя команд управления соответственно, третий вход формирователя команд управления подключен к выходу устройства хранения аэронавигационных данных и пилотажно-навигационных характеристик беспилотного летательного аппарата, к первому и второму входам блока шифрования подключены транспондер и формирователь команд управления соответственно, а первый и второй выходы блока шифрования соединены со вторым входом транспондера и с четвертым входом формирователя команд управления соответственно, вход пульта управления вводом и выводом данных соединен со вторым выходом формирователя команд управления, а выход подключен к входу устройства отображения. Бортовая аппаратура беспилотного летательного аппарата включает в себя антенный блок, к первому и второму входам блока шифрования подключены транспондер и вычислитель соответственно, а первый и второй выходы блока шифрования соединены со вторым входом транспондера и со вторым входом вычислителя соответственно, второй вход блока вычислителя, соединенный с блоком датчиков параметров внешней среды, спутниковую навигационную систему, выход которой подключен к третьему входу вычислителя, автопилот, вход которого подключен к выходу вычислителя, а выход - к исполнительным устройствам рулевых приводов. Транспондеры содержат высокоточные часы и получают сообщения из одного или нескольких радиоканалов с временным разделением и передают в указанный канал собственные сообщения, которые содержат данные о положении, координатах и параметрах движения, а также команды управления.
Проведенный анализ технических решений позволил установить, что аналоги, характеризующиеся совокупностью признаков, тождественных всем признакам заявленного технического решения, отсутствуют в известных носителях информации, что указывает на соответствие заявленного способа условию патентоспособности "новизна".
Результаты поиска известных решений в данной и смежных областях техники с целью выявления признаков, совпадающих с отличительными от прототипа признаками, показали, что они не следуют явным образом из уровня техники. Из уровня техники также не выявлена известность влияния предусматриваемых существенными признаками заявленного изобретения преобразований на достижение указанного технического результата. Следовательно, заявленное изобретение соответствует условию патентоспособности "изобретательский уровень".
Заявленный способ поясняется чертежами, на которых показаны:
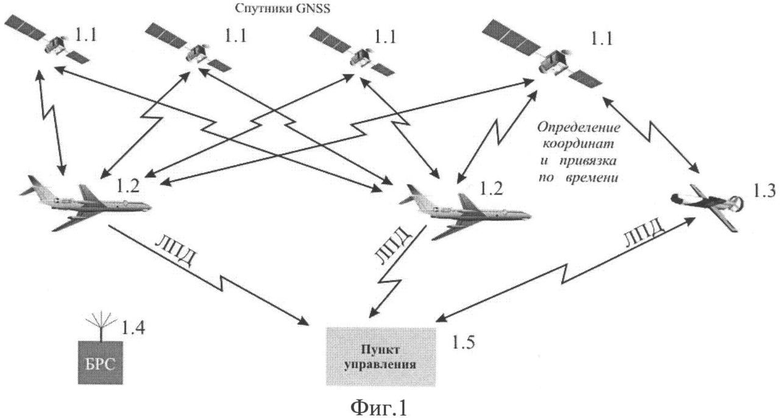
фиг.1 - рисунок, поясняющий обмен информацией между подвижными объектами, пунктом управления и базовыми радиостанциями, а также работу спутниковой системы GPS;
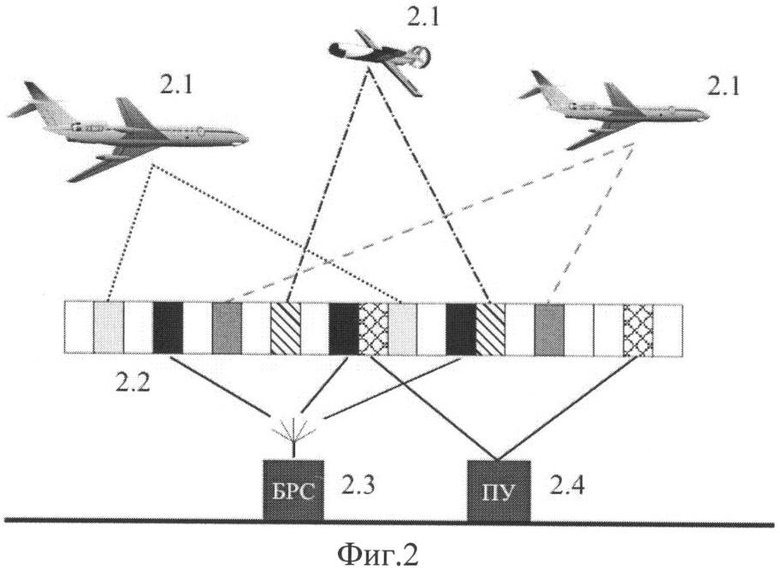
фиг.2 - рисунок, поясняющий распределение слотов в общем радиоканале;
фиг.3 - структурная схема устройства, реализующего заявленный способ;
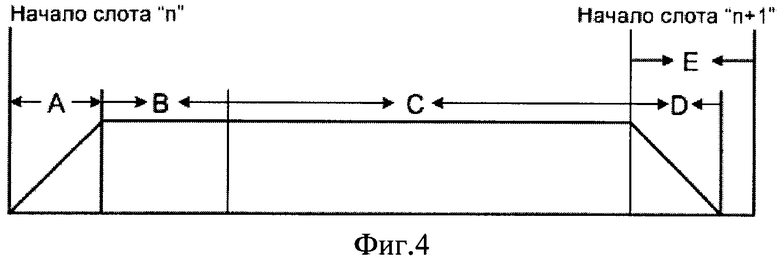
фиг.4 - циклограмма передачи однослотового сообщения;
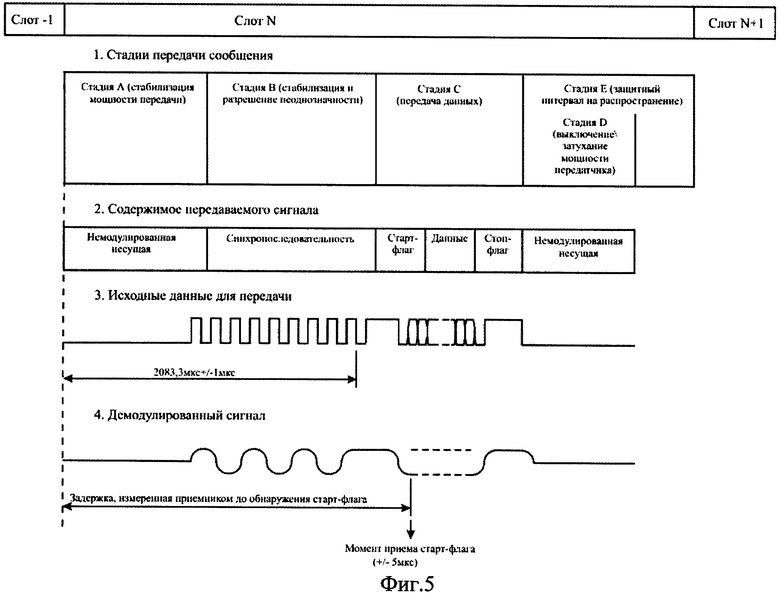
фиг.5 - циклограммы работы приемопередающего оборудования.
Эффективным путем решения указанной выше проблемы является повышение информативности средств наблюдения за воздушной обстановкой, а также применение эффективных способов управления БПЛА.
Эта задача решается в заявленном способе. Возможность реализации заявленного способа с достижением указанного технического результата объясняется следующим образом.
Наиболее высокой точностью определения координат местоположения в настоящее время обладают спутниковые навигационные системы. Причем с их помощью автоматически определяют высоту полета, а также вычисляют параметры движения, такие как вертикальная скорость, путевая скорость и угол пути. С помощью указанных систем также выполняют синхронизацию бортовых часов, а именно их привязку к шкале единого точного времени.
В состав бортового оборудования БПЛА и гражданских ВС входит также инерциальная навигационная система, датчики статического давления, измерители температуры окружающего воздуха и вычислители скорости и направления ветра.
На земле располагаются одна или несколько базовых радиостанций (БРС) 1.4 (см. фиг.1), предназначенных для выработки дифференциальных поправок спутниковых систем позиционирования и навигации, а также для координации работы радиоканалов. Пункт управления 1.5 полетом БПЛА 1.3 может располагаться как на земле, так и на другом подвижном объекте. В случае расположения на земле он может быть совмещен с БРС 1.4. На БПЛА 1.3, БРС 1.4, ПУ 1.5 и каждом из ВС 1.2 устанавливают транспондеры. Каждый транспондер содержит приемник спутниковой навигационной системы (CHC-GNSS) типа NAVSTAR и/или ГЛОНАСС, а также приемопередающее устройство. Обмен информацией между ПУ 1.5, БПЛА 1.3, подвижными и базовыми радиостанциями 1.4 и работа спутниковой навигационной системы 1.1 поясняется на фиг.1.
Все транспондеры работают на одной частоте, так что БПЛА и другие объекты наблюдения, находящиеся в пределах радиовидимости друг от друга, оказываются связанными одним или несколькими общими радиоканалами.
Каждый БПЛА прослушивает радиоканал, получает координатную информацию о других участниках движения, находящихся в зоне радиовидимости и транслирует в радиоканал информацию о своем идентификаторе, собственных координатах, высоте, скорости и направлении движения и дополнительную информацию.
На ПУ полетом БПЛА получают сообщения с БПЛА, а также координаты и параметры движения других ЛА, вырабатывают команды управления, которые также транслируются в общий радиоканал и принимаются транспондером, который установлен на борту БПЛА. Использование общего узкополосного радиоканала с временным разделением позволяет существенно повысить помехозащищенность по сравнению с широкополосными ЛПД. Общий канал с временным разделением может быть организован различными способами. Наиболее полно его достоинства проявляются в случае системы автоматического зависимого наблюдения (АЗН) в режиме радиовещания. Трансляция указанных сообщений, также как и сообщения с борта ВС, производится в отрезки дискретной шкалы единого времени, которые объединяются в кадры, с известным периодом повторения.
Процесс распределения отрезков времени поясняется фиг.2 и более подробно Приложением. Приемник СНС обеспечивает каждому транспондеру точную привязку к шкале единого времени (UTS).
Каждый транспондер прослушивает эфир и в пределах кадра определяет свободные слоты, а именно не занятые другими транспондерами, резервирует их, о чем сообщает в эфир и в последующем транслирует в зарезервированных слотах 2.2 сообщения о собственных координатах и команды управления полетом БПЛА, как показано на фиг.2.
Наряду с участниками движения 2.1, транспондер устанавливают и на наземной базовой радиостанции 2.3, которая может быть совмещена с ПУ 2.4. Базовая радиостанция может передавать дифференциальные поправки, синхросигналы точного времени, команды о занятии слотов и иную информацию.
Для определенных фаз полета БПЛА план и программу его движения закладывают в память бортового вычислителя заранее, при этом полет выполняется в автономном режиме с помощью автопилота. В реальных условиях требуется корректировать параметры движения БПЛА и перестраивать программу в зависимости от изменившейся обстановки и возникновения новых задач. С учетом повышения точности и надежности измерения координат и параметров движения, которые обеспечиваются спутниковыми системами наблюдения, реальным становится получение достоверного и точного прогноза движения БПЛА на некотором интервале времени с учетом его динамики и влияния внешней среды. Это позволяет использовать дискретный способ управления, при котором управляющая информация подается на борт БПЛА в сжатой форме, а именно в виде макрокоманд. Указанные команды содержат необходимые данные об изменении программы движения и выполняются БАСУ в соответствии с заранее заданными алгоритмами.
Указанный способ передачи команд в сжатой закодированной форме позволяет снизить скорость передачи данных и, как следствие, полосу частот, что приводит к увеличению дальности передачи и помехозащищенности по сравнению с широкополосной линией при той же мощности передатчика.
Для полета по маршруту или для его изменения макрокоманды содержат навигационные данные о поворотных пунктах маршрута с указанием их географической широты и долготы, заданных ортодромических путевых углов, величин бокового упреждения разворота, углов упреждения выхода из разворота, ограничений на величину крена при выполнении разворота, а также заданные значения высоты полета, вертикальной скорости и угла наклона траектории.
По указанным данным и по известным алгоритмам в вычислителе БАСУ вырабатываются в реальном времени управляющие воздействия на изменение параметров движения и подаются на автопилот.
Для расширения возможности применения БПЛА предусматривают макрокоманды управления, которые содержат код каждого из заранее определенных маневров в горизонтальной и вертикальных плоскостях, параметры указанного маневра и данные о моменте начала маневра и его окончания. Такие маневры необходимы при облете препятствий, уклонений от непреднамеренных столкновений с другими ЛА, а также при решении БПЛА специальных задач. В качестве указанных параметров при выполнении маневра в вертикальной плоскости выступают заданные вертикальные скорости или угол наклона траектории, а для маневра в горизонтальной плоскости - заданный путевой угол, а также угловая скорость или радиус разворота. Макрокоманды формируются на АРМе в ПУ оператором с помощью клавиатуры или других устройств ввода данных. По данным наблюдений вычисляют отклонения от программного движения, а в случае, когда указанные отклонения превышают допустимые, вырабатывают и подают в радиоканал дополнительно корректирующие разовые команды, которые формируют таким образом, чтобы уменьшить величину указанных отклонений.
Достоинством предлагаемого способа управления и наблюдения является доступность информации для всех участников движения, оборудованных транспондером.
В случае когда к передаваемым данным предъявляются требования скрытности и конфиденциальности, доступ внешних наблюдателей к командам управления и данным о координатах и параметрах движения БПЛА ограничивают путем шифрования соответствующих сообщений. Для шифрования и дешифрования сигналов используют специальные программно-аппаратные средства, системы или комплексы, реализующие алгоритмы криптографического преобразования информации при ее передаче по каналам связи.
Скорость передачи данных по ЛПД АЗН широковещательного режима составляет 19200 бит в секунду. Вследствие временного разделения канала (разбиения каждой секунды на слоты вещания) и оформления каждого слота в виде цифрового пакета с заголовком и контролем целостности данных, в каждом слоте вещания (а их в секунде 75) может быть передано порядка 200 бит полезной информации. Исходя из того, что в стандартном режиме работы ЛПД каждому участнику радиообмена выделяется не более одного слота в секунду, можно говорить об ограничении пропускной способности канала сверху скоростью 200 бит в секунду. Данная скорость является усредненным значением, поскольку информационный пакет передается в течение 13,5 мс, а в остальное время радиоканал предоставляется для использования другим участникам радиообмена. Таким образом, при использовании системы управления можно рассчитывать на быструю доставку коротких команд управления, быструю доставку коротких информационных пакетов, содержащих данные о состоянии управляемого БПЛА.
На передачу и исполнение команд управления требуется определенное время, которое рассчитывают для каждой команды. Для БПЛА самолетного типа время переходных процессов между установившимися режимами полета (например, горизонтальным полетом и разворотом или набором высоты и снижением) находится в пределах нескольких секунд (1-3 с).
При необходимости срочного исполнения разовых команд используют дополнительный радиоканал.
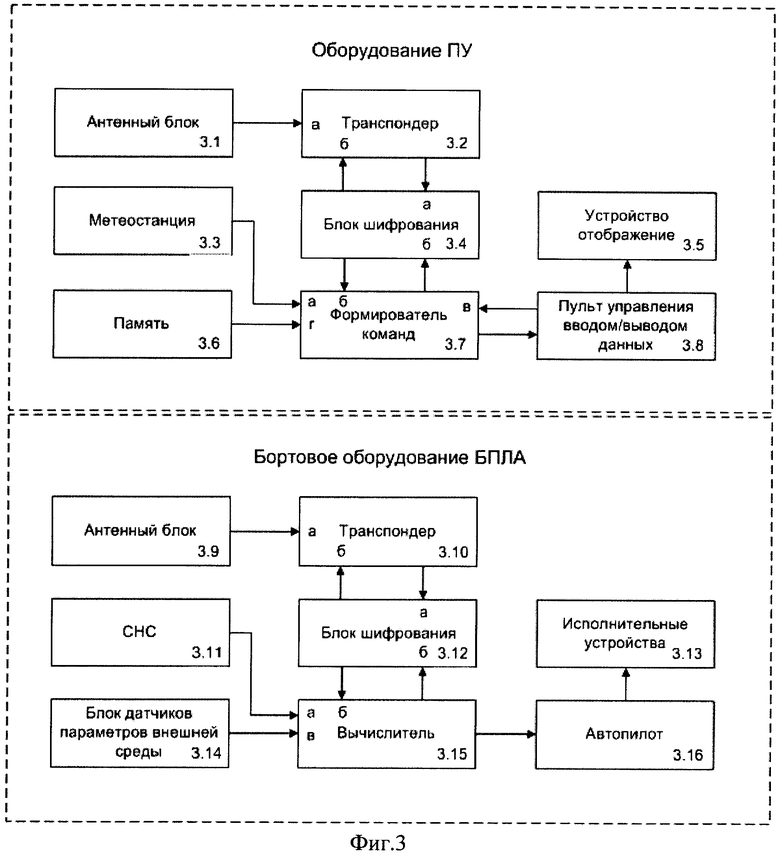
Предлагаемый способ реализуется устройством, блок-схема которого представлена на фиг.3.
На схеме изображено оборудование ПУ полетом БПЛА, состоящее из антенного блока 3.1, соединенного с входом "а" транспондера 3.2, пульта управления вводом и выводом данных 3.8 и метеостанции 3.3, выходы которых подключены к входам "в" и "а" формирователя команд управления 3.7 соответственно, вход "г" формирователя команд управления 3.7 подключен к выходу устройства памяти для хранения аэронавигационных данных и пилотажно-навигационных характеристик БПЛА 3.6, к входам "а" и "б" блока шифрования 3.4 подключены транспондер 3.2 и формирователь команд управления 3.7 соответственно, а первый и второй выходы блока шифрования 3.4 соединены с входом "б" транспондера 3.2 и с входом "б" формирователя команд управления 3.7 соответственно, вход пульта управления вводом и выводом данных 3.8 соединен со вторым выходом формирователя команд управления 3.7, а выход подключен к входу устройства отображения 3.5.
Бортовое оборудование, установленное на БПЛА, включает в себя антенный блок 3.9, соединенный с входом "а" транспондера 3.10, подключенные к входам "а" и "б" блока шифрования 3.12 транспондер 3.10 и вычислитель 3.15 соответственно, а первый и второй выходы блока шифрования 3.12 соединены с входом "б" транспондера 3.10 и с входом "б" вычислителя 3.15 соответственно, вход "в" блока вычислителя 3.15 соединен с блоком датчиков параметров внешней среды 3.14, спутниковую навигационную систему 3.11, выход которой подключен к входу "а" вычислителя 3.15, автопилот 3.16, вход которого подключен к выходу вычислителя 3.15, а выход к исполнительным устройствам рулевых приводов 3.13.
Устройство работает следующим образом. Транспондеры содержат высокоточные часы и получают сообщения из одного или нескольких радиоканалов с временным разделением и передают в указанный канал собственные сообщения, которые содержат данные о положении, координатах и параметрах движения.
В ПУ по данным о текущих координатах и параметрах движения подвижных объектов, которые получены по общему радиоканалу, формируют двух или трехмерное изображение воздушной обстановки на экране монитора АРМ оператора.
В соответствии с назначением БПЛА и конкретными задачами, которые он должен решать на данном этапе полета, пилот-оператор устанавливает тип маневра и его параметры, включая момент начала и окончания его выполнения. С помощью клавиатуры, мыши, мониторов "touch screen" или других устройств пилот-оператор вводит их блок формирования команд управления. В вычислителе, входящем в указанный блок, рассчитывают время упреждения, а команды передают в транспондер. По полученным транспондером данным, в вычислителе также рассчитывают прогнозируемые траектории всех участников движения, проверяют критерии сближения. При обнаружении прогноза опасного сближения вырабатывают команды маневра уклонения беспилотного летательного аппарата и транслируют их в общий радиоканал.
Таким образом, в соответствии с данным техническим предложением оператор пункта управления полетом БПЛА и другие участники воздушного движения получают из одного или нескольких общих радиоканалов полную и достоверную информацию о координатах и параметрах полета всех участников воздушного движения. С АРМ оператора в указанный канал передают макрокоманды управления, причем за счет использования узкополосного канала передачи данных достигается высокая помехозащищенность при ограниченной мощности передатчика. В результате чего обеспечивается эффективное управление БПЛА и как следствие высокий уровень безопасности полетов в воздушном пространстве.
| название | год | авторы | номер документа |
|---|---|---|---|
| Малогабаритная радиостанция передачи команд управления беспилотным летательным аппаратом | 2021 |
|
RU2767605C1 |
| УНИФИЦИРОВАННЫЙ БОРТОВОЙ МОДУЛЬ АВИАЦИОННОГО НАБЛЮДЕНИЯ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2021 |
|
RU2794287C1 |
| СПОСОБ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2013 |
|
RU2562890C2 |
| Способ управления полётом беспилотного летательного аппарата | 2022 |
|
RU2816327C1 |
| Способ автоматизированного управления эксплуатацией беспилотного транспортного средства в общем транспортном пространстве для обеспечения безопасного трафика движения | 2019 |
|
RU2724911C1 |
| СИСТЕМА РАДИОСВЯЗИ С БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2024 |
|
RU2839424C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО КОНТРОЛЯ И УПРАВЛЕНИЯ АВИАЦИОННЫМИ БЕСПИЛОТНЫМИ СИСТЕМАМИ | 2016 |
|
RU2647390C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО КОНТРОЛЯ И УПРАВЛЕНИЯ ПОЛЕТАМИ БЕСПИЛОТНЫХ АВИАЦИОННЫХ СИСТЕМ В ОБЩЕМ ВОЗДУШНОМ ПРОСТРАНСТВЕ | 2018 |
|
RU2674536C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ РОБОТИЗИРОВАННОГО БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА В АВТОНОМНОМ РЕЖИМЕ | 2020 |
|
RU2733453C1 |
| СПОСОБ ПРИМЕНЕНИЯ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И УСТРОЙСТВО УПРАВЛЕНИЯ | 2011 |
|
RU2457531C1 |
Изобретение относится к области приборостроения и может найти применение в системах управления полетом беспилотными летательными аппаратами (БПЛА) и в системах наблюдения за движением объектов в воздушном пространстве. Технический результат - повышение эффективности управления БПЛА и уровня безопасности. Для достижения данного результата сигнал управления формируют в виде макрокоманд и передают в общий радиоканал. В радиоканал также поступают сообщения от всех участников воздушного движения, содержащие данные об их местоположении, высоте, скорости и направлении полета, а также дополнительная информация. При этом использование узкополосного канала передачи данных позволяет достичь высокой помехозащищенности при ограниченной мощности передатчика. 2 н. и 7 з.п. ф-лы, 5 ил.
1. Способ управления одним или несколькими беспилотными летательными аппаратами, каждый из которых оборудован бортовой автоматической системой управления, спутниковой навигационной системой, высокоточными синхронизированными часами, а также бортовым вычислителем и приемо-передающей радиостанцией, с помощью которой осуществляется цифровая радиосвязь с базовой радиостанцией, с стационарным или подвижным пунктом управления, который оборудован автоматизированным рабочим местом оператора, отличающийся тем, что передача команд управления движением беспилотного летательного аппарата, передача данных о координатах и параметрах его движения, а также передача идентификационных номеров и данных о координатах и параметрах движения других подвижных объектов, оборудованных приемопередающими радиостанциями и находящихся в пределах радиовидимости, производится в один или несколько общих радиоканалов, причем трансляция сообщений каждой передающей радиостанцией производится в заранее заданный отрезок дискретной шкалы единого времени с временным упреждением, которого достаточно для компенсации запаздывания в получении и исполнении указанных команд.
2. Способ по п.1, отличающийся тем, что команды управления беспилотным летательным аппаратом содержат навигационные данные об одном или нескольких поворотных пунктах маршрута с указанием их географической широты и долготы, заданных ортодромических путевых углов, величин бокового упреждения разворота, ограничений на величину крена при выполнении разворота, а также заданные значения высоты полета, вертикальной скорости и угла наклона траектории.
3. Способ по п.1, отличающийся тем, что команды управления содержат код каждого из заранее определенных маневров в горизонтальной и вертикальной плоскостях, параметры указанного маневра, данные о моменте начала маневра и его окончании, причем по данным наблюдений вычисляют отклонения от программного движения, а в случае, когда указанные отклонения превышают допустимые, вырабатывают и подают в радиоканал дополнительно корректирующие разовые команды, которые формируют таким образом, чтобы уменьшить величину указанных отклонений.
4. Способ по п.1, отличающийся тем, что каждый из участников движения передает в общий канал в заранее заданный интервал времени или по запросу свой идентификационный номер, данные о собственных пространственных координатах, а именно широту, долготу и высоту, параметры собственного движения, а именно собственную путевую скорость, угол пути, угол наклона траектории и вертикальную скорость, а также отсчет момента измерения указанных данных по шкале единого времени.
5. Способ по п.1, отличающийся тем, что в пункте управления по данным о текущих координатах и параметрах движения подвижных объектов, которые получены по общему радиоканалу, формируют двух- или трехмерное изображение воздушной обстановки на экране монитора автоматизированного рабочего места оператора, рассчитывают прогнозируемые траектории всех участников движения, проверяют критерии сближения, причем при обнаружении прогноза опасного сближения вырабатывают команды маневра уклонения беспилотного летательного аппарата и транслируют их в общий радиоканал.
6. Способ по п.1, отличающийся тем, что сообщения о командах управления и данных о координатах и параметрах движения беспилотного летательного аппарата перед передачей в общий радиоканал зашифровывают, а на приемном конце дешифруют.
7. Способ по п.1, отличающийся тем, что сообщение, передаваемое бортовой радиостанцией беспилотного летательного аппарата, содержит данные о параметрах внешней среды, а именно скорость и направление ветра, температуру и атмосферное давление на высоте полета, а также данные о состоянии бортового оборудования.
8. Способ по п.1, отличающийся тем, что команды управления вычисляют с учетом динамических характеристик беспилотного летательного аппарата и его бортовой автоматической системы управления, а также с учетом внешних возмущений, неисправностей и отказов бортового оборудования.
9. Комплекс управления полетом беспилотного летательного аппарата, реализующий способ по п.1, состоящий из оборудования стационарного или подвижного пункта управления, в состав которого входит автоматизированное рабочее место пилота-оператора, включающее в себя антенный блок, соединенный с первым входом транспондера, пульт управления вводом и выводом данных и метеостанция, выходы которых подключены к первому и второму входам формирователя команд управления соответственно, третий вход формирователя команд управления подключен к выходу устройства хранения аэронавигационных данных и пилотажно-навигационных характеристик беспилотного летательного аппарата, к первому и второму входам блока шифрования подключены транспондер и формирователь команд управления соответственно, а первый и второй выходы блока шифрования соединены со вторым входом транспондера и с четвертым входом формирователя команд управления соответственно, вход пульта управления вводом и выводом данных соединен с вторым выходом формирователя команд управления, а выход подключен к входу устройства отображения, а также установленные на борту беспилотного летательного аппарата антенный блок, соединенный с первым входом транспондера, подключенные к первому и второму входам блока шифрования транспондер и вычислитель соответственно, а первый и второй выходы блока шифрования соединены с вторым входом транспондера и с вторым входом вычислителя соответственно, второй вход блока вычислителя соединен с блоком датчиков параметров внешней среды, спутниковую навигационную систему, выход которой подключен к третьему входу вычислителя, автопилот, вход которого подключен к выходу вычислителя, а выход - к исполнительным устройствам рулевых приводов, отличающийся тем, что транспондеры содержат высокоточные часы и получают сообщения из одного или нескольких радиоканалов с временным разделением и передают в указанный канал собственные сообщения, которые содержат данные о положении, координатах и параметрах движения, а также команды управления.
| US 2008033604 A1, 07.02.2008 | |||
| WO 2007146538 A1, 21.12.2007 | |||
| ЛЕБЕДЕВ А.А., КАРАБАНОВ В.А | |||
| Динамика систем управления беспилотными летательными аппаратами | |||
| - М.: Машиностроение, 1965, с.218-223 | |||
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ И СИСТЕМА НАВЕДЕНИЯ РАКЕТЫ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2241950C1 |
| СЛЕДЯЩАЯ ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА | 2003 |
|
RU2248009C2 |

