Изобретение относится к области транспорта, в том числе в сельском хозяйстве, преимущественно к технологиям механического перемещения объектов, в частности, к мостовому земледелию. Также изобретение относится к области использования в транспортных средствах инерционных двигателей-движителей с маховиками, будучи основано на преобразовании вращательного движения маховиков в поступательное или вращательное движение самого объекта.
При существующей технологии механического движения объекта широко используется первый закон Ньютона: действие равно противодействию. Движитель перемещающегося объекта действует на среду, в которой осуществляется движение, а реакция среды обеспечивает механическое перемещение объекта в этой среде. Данная операция сопровождается нарушением состояния (появление колей в мягком грунте от колес или гусениц тракторов, возникновение и движение водяных волн за катером и т.п.) или выбранного режима среды (нагрев рельс при разгоне локомотива, уплотнение и разрежение воздуха за самолетом и т.п.) при ее взаимодействии с движителем объекта. Для использования электрических или магнитных сил при перемещении объекта приходится создавать соответствующее поле в данной среде, что далеко не всегда возможно и целесообразно.
Известны способы и устройства преобразования центробежного усилия в возвратно-поступательное перемещение объекта и инерционные движущие устройства, использующие физические свойства механической инерции движущихся в гравитационном поле рабочих грузов перемещаемого в пространстве объекта.
Примерами осуществления этих способов и устройств являются технические решения:
- по патенту Российской Федерации RU №2076241 С1, МКИ F 03 G 3/00. Инерционное движущее устройство ИДУ-4 / В.Д.Корнилов, В.В.Корнилов // БИ. 1997. №9;
- по патенту Российской Федерации RU №2080483 С1, МКИ F 03 G 3/00. Гравиинерционный двигатель / Э.И.Линевич // БИ. 1997. №15;
- по патенту Российской Федерации RU №2123134 С1, МКИ F 03 G 3/00, F 02 В 59/00, 65/00, В 60 К 17/00. Инерционный движитель-двигатель / В.Г.Калужский // БИ. 1998. №34;
- по патенту Российской Федерации RU №2143585 С1, МКИ F 03 G 3/08. Способ управления транспортным средством с инерционным движителем и устройство для его осуществления / А.Г.Албаков, Э.М.Хачукаев // БИ. 1999. №36;
- по патенту Франции №2456861, F 03 G 3/00. Systeme a propulsion inertielle / Gozlan Claude // B.O.P.I. - "Listes" n° 50 du 12-12-1980.
- по патенту Российской Федерации RU №2066398 С1, МКИ F 03 G 3/08. Инерционный движитель для транспортного средства / А.А.Черепанов // БИ. 1996. №25.
Аналогичные задачи решаются в следующих ниже и во многих других публикациях:
- патент ФРГ №4334723 A1, F 03 G 3/08. Schwungrad mit variablem Durchmesser zur Kraftspeicherung / Kummel Peter // Bundesdruckerei 02. 95 508015/358;
- патент Франции №2590941, F 03 G 3/00. Dispositif de propulsion centrifuge universel / Mentele Francois Antoine Joseph // BOPI "Brevets" n° 23 du 5 juin 1987;
- патент Франции №2671832, F 03 G 3/00. Dispositi fa force centrifuge differentielle / Blanc-Russac Jean-Marie // 24.07.92 Bulletin 92/30;
- патент Франции №2811031, F 03 G 3/00, F 03 G 7/00. Propulseur centrifuge / Gillet Jean Claude // 04.01.02 Bulletin 02/01;
- патент Франции №2435614, F 03 G 3/00. Systeme a propulsion inertielle / Gozlan Claude // B.O.P.I. - "Listes" n. 14 du 4-4-1980;
- патент ФРГ №19706346 A1, F 03 G 3/08, В 60 K 6/06. Schwungradantrieb / Schulz-Klemig Peter // Bundesdruckerei 06.98 802 034/488/1;
- патент ФРГ №2812527 A1, F 03 G 3/00. Vorrichtung zum Antreiben einer Welle /Hennigsen Ernst 119. 79 909 839/414.
Известное устройство по патенту РФ №2076241 использует особенности криволинейного движения дебалансных грузов, которое обеспечивает однонаправленное действие сил инерции. Грузы располагаются на окружностях, которые перекатываются по опорной окружности без скольжения. При этом заявленная как простая конструкция устройства является на самом деле достаточно сложной и ее наращивание для увеличения тягового усилия затруднительно.
Известное устройство по патенту РФ №2080483 использует особенности синхронного вращения роторов с грузами в плоскостях, перпендикулярных плоскости вращения опорного колеса. При нахождении плоскостей вращения двух противолежащих роторов в горизонтальной плоскости, которая перпендикулярна направлению действия гравитации, момент силы вращения опорного колеса имеет наибольшее значение. В результате осуществляется генерирование механической энергии вращения опорного колеса. Грузы роторов движутся синхронно. Необходимость осуществления круговых движений в нескольких плоскостях предопределяет сложность конструкции устройства.
Известное устройство по патенту РФ №2123134 использует особенности принудительного движения груза в виде подвижной штанги с жестко закрепленным на ней поршнем по криволинейной замкнутой траектории в плоскости поступательного движения устройства, для чего дополнительно применен двухтактный двигатель внутреннего сгорания. Очевидна чрезмерная сложность устройства.
Известное устройство по патенту РФ №2143585 использует особенности принудительных вращательно-ударных движений грузов в виде шаров из ферромагнитного материала, движущихся вместе с маховиком по круговой траектории в горизонтальной плоскости перемещения устройства, изнутри по неподвижному ободу устройства. От углового положения ударного шара и от силы его удара зависит направление движения устройства в указанной плоскости. Недостатком этого технического решения является сложность и высокая потребная мощность схемы управления поворотами и всего устройства в целом.
Известное устройство по патенту Франции №2456861 представляет собой ротор, состоящий из двух шестерен с установленными на них дебалансными грузами, которые вращаются вокруг неподвижной центральной шестерни, в результате чего возникает однонаправленное пульсирующее усилие, приложенное ко всему устройству. Отмечая исключительную простоту машины, следует отнести к ее существенному недостатку чрезмерно высокий уровень пульсаций (по существу рывков) результирующего поступательного тягового усилия.
Известное устройство по патенту РФ №2066398 использует особенности поступательно-криволинейного вращения дисков-маховиков, которые скользят внутри вращающихся по кругу опорных колец и одновременно скользят по осям вращения дисков по прямолинейной прорези в каждом диске. Обратная составляющая тягового усилия теоретически отсутствует полностью. При этом пульсации результирующей тяги принципиально не устранимы. Механическая передача энергии для одновременного движения опорных колей по кругу, дисков по внутренней поверхности опорных колец и одновременно дисков поступательно вдоль осей их вращения отличается сложностью. Электрическая передача этих трех различных одновременных движений также затруднена, поскольку требует самой жесткой синхронизации всех движений.
Наиболее близким по технической сущности к предлагаемому изобретению является устройство по патенту №2066398, позволяющее избавиться от паразитных обратных поступательных движений устройства, которые снижают КПД устройства и вызывают пульсации и вибрации, и использующее вращательное движение грузов по криволинейной траектории.
Недостатками перечисленных аналогов и прототипа является чрезмерная сложность конструкции устройств и трудности при их практической реализации либо низкие эксплуатационные характеристики - малая суммарная тяга, повышенные вибрации и т.п. Как следствие, возможно не контролируемое изменение условий синхронного движения масс либо значительные затраты на изготовление и эксплуатацию устройств. В результате технико-экономическая эффективность подобных движителей становится неприемлемо низкой для решения практических задач движения в поле гравитации.
Задачей изобретения является плавное, без рывков и пульсаций тягового усилия механическое перемещение объекта, а также возможность наращивания результирующего тягового усилия без существенного усложнения конструкции движителя при невысокой сложности и стоимости его конструкции.
Изобретение использует свойство суперпозиций (сложения) кинематических усилий многочисленных вращающихся по криволинейным траекториям дебалансных рабочих масс движителя.
В результате использования изобретения осуществляется плавное, без рывков и пульсаций тягового усилия механическое перемещение объекта, а также возможность наращивания результирующего усилия без существенного усложнения конструкции движителя при невысокой сложности и стоимости его конструкции.
Вышеуказанный технический результат достигается тем, что предложен инерционный движитель устройства, содержащий корпус и конструкцию, включающую опорное колесо, расположенное в плоскости поступательного движения устройства и жестко связанное с корпусом, ротор, соединенный с двигателем, рабочие колеса, установленные на роторе с возможностью свободного вращения и принудительного качения по опорному колесу без скольжения, дебалансные грузы, каждый из которых в соответствующей фазе углового положения установлен на соответствующем рабочем колесе, имеющем диаметр опорного колеса, причем конструкция снабжена соседними опорными колесами и рабочими колесами, предназначенными для качения без скольжения по соседним опорным колесам, концентрично с указанным опорным колесом, оси вращения рабочих колес, предназначенных для качения без скольжения по соседним опорным колесам, проходят в промежутках между рабочими колесами, катящимися по соседнему опорному колесу, такая же зеркально отраженная конструкция установлена в плоскости, перпендикулярной направлению поступательного движения устройства, причем роторы зеркально отраженной конструкции предназначены для вращения по отношению к роторам упомянутой конструкции во встречном направлении.
Технический результат достигается также тем, что предложен инерционный движитель устройства, у которого количество рабочих колес с толщиной, равной или превышающей ширину фрикционной или зубчатой дорожки на периметре каждого опорного колеса, не превышает пяти штук.
Сущность предлагаемого изобретения поясняется фиг.1...4.
На фиг.1 показана общая кинематическая схема инерционного движителя устройства с многочисленными концентрично друг другу установленными опорными колесами, вид со стороны торцов роторов, параллельно их осям вращения.
На фиг.2 приведен вид сверху инерционного движителя устройства по фиг.1 с парой роторов, каждый из которых на шести опорных колесах удерживает шесть четверок рабочих колес, вид параллельно направлению поступательного движения инерционного движителя и всего перемещаемого инерционным движителем устройства (объекта транспортирования).
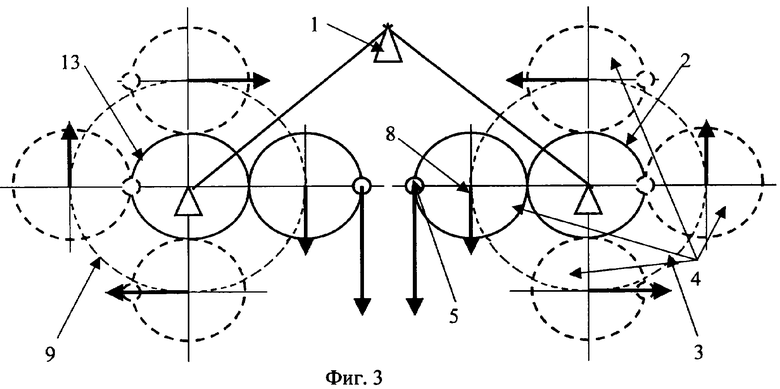
На фиг.3 приведена общая схема действия сил симметричной конструкции основного узла инерционного движителя с двумя опорными и с двумя рабочими колесами.
На фиг.4 приведена общая кинематическая схема конструкции основного узла инерционного движителя. Этот вариант основного узла состоит из одного опорного колеса и одного рабочего колеса (с 4-мя рабочими колесами в данном варианте конструкции основного узла, рассматриваемого в описании, а также в графических материалах), и показаны траектории движения дебалансных грузов.
Инерционный движитель устройства содержит корпус 1 и конструкцию, включающую опорное колесо 2, расположенное в плоскости поступательного движения устройства и жестко связанное с корпусом 1, ротор 3, соединенный с двигателем, рабочие колеса 4, установленные на роторе 3 с возможностью свободного вращения и принудительного качения по опорному колесу 2 без скольжения, дебалансные грузы 5, каждый из которых в соответствующей фазе углового положения установлен на соответствующем рабочем колесе 4, имеющем диаметр опорного колеса 2, причем конструкция снабжена соседними опорными колесами 6 и рабочими колесами 7, предназначенными для качения без скольжения по соседним опорным колесам 6, концентрично с указанным опорным колесом 2, оси вращения рабочих колес 8, предназначенных для качения без скольжения по соседним опорным колесам 6, проходят в промежутках между рабочими колесами 8, катящимися по соседнему опорному колесу 6, такая же зеркально отраженная конструкция установлена в плоскости, перпендикулярной направлению поступательного движения устройства, причем роторы зеркально отраженной конструкции 9 предназначены для вращения по отношению к роторам упомянутой конструкции 3 во встречном направлении.
На фиг.1 показаны: ротор зеркально отраженной конструкции основного узла 9; дебалансный груз 5, установленный на рабочем колесе 4 описанной конструкции основного узла, которое связано с первым по порядку счета от наблюдателя опорным колесом 2 описанной конструкции основного узла; дебалансный груз 10, установленный на рабочем колесе 7 описанной конструкции основного узла, которое связано со вторым по порядку счета опорным колесом 6 описанной конструкции основного узла (на фиг.1 закрыто первым по порядку счета опорным колесом 2; груз 11, установленный на рабочем колесе 12 зеркально отраженной конструкции основного узла, которое связано с первым по порядку счета опорным колесом 13 зеркально отраженной конструкции основного узла (на фиг.1 закрыто внешней поверхностью ротора 9 зеркально отраженной конструкции основного узла); груз 14, установленный на рабочем колесе 15 зеркально отраженной конструкции основного узла, которое связано со вторым по порядку счета опорным колесом 16 зеркально отраженной конструкции основного узла устройства (на фиг.1 второе по порядку счета опорное колесо 16 также закрыто внешней поверхностью ротора зеркально отраженной конструкции основного узла 9 и затем закрыто и первым по порядку счета опорным колесом 13). Корпус устройства 1 жестко связан со всеми опорными колесами.
На фиг.2 показаны: первое, третье, пятое по порядку счета опорные колеса 2, 17, 18 и 13, 19, 20 соответственно описанной и зеркальной конструкций основного узла, жестко связанные с корпусом устройства 1; роторы 3 и 9 соответственно описанной и зеркальной конструкций основного узла; рабочие колеса 4, 7 и 12, 15 соответственно описанной и зеркальной конструкций основных узлов инерционного движителя.
На фиг.3 показаны: корпус устройства 1; опорные колеса описанной и зеркально отраженной конструкции основного узла 2 и 13, жестко связанные с корпусом устройства 1; роторы описанной и зеркально отраженной конструкций основного узла 3 и 9.
На фиг.4 показаны: линейная скорость Vлин.раб.колеса движения рабочего колеса 4 по опорному колесу 2; наибольшая линейная скорость движения Vгруза макс = 2Vлин.раб.колеса груза 5 по отношению к корпусу устройства 1; наименьшая линейная скорость Vгруза мин = 0 м/с движения груза 5 по отношению к корпусу устройства 1; радиус опорного 2 и рабочего 4 колеса величиной r; траектория 21 центра рабочего колеса 4 при его движения по опорному колесу 2; траектория 22 движения груза 5, установленного на рабочем колесе 4; угол ϕ между направлениями от центра рабочего колеса 4 на центр опорного колеса 2 и на груз 5; ось абсцисс 23 (горизонтальная ось); ось ординат 24 (вертикальное направление движения устройства); ось рабочего колеса 8.
Инерционный движитель работает следующим образом (фиг.1). Двигатель перемещаемого устройства (транспортируемого объекта) вращает роторы 3 и 9 описанной и зеркально отраженной конструкций во взаимно противоположных направлениях. Роторы 3 и 9 заставляют рабочие колеса 4, 7 и 12, 15 катиться без трения по своим опорным колесам 2, 6 и 13, 16 соответственно. Зеркальное отражение второй половины конструкции, то есть полная симметрия устройства инерционного движителя позволяет избавиться от составляющей вращательного движения, которая сопутствует только одной части устройства (или только правой, или только левой на фиг.1).
Ось вращения рабочего колеса 8 на втором по счету опорном колесе 2 описанной конструкции занимает место в свободном промежутке между рабочими колесами 4 первого по счету опорного колеса 2 описанной конструкции (фиг.1). Такие свободные промежутки на расстоянии двойного радиуса опорного колеса г (фиг.4) от его центра симметрии имеются при количестве рабочих колес менее или равном пяти. При шести идущих друг за другом рабочих колесах устройство практически не осуществимо, так как соседние рабочие колеса касаются своими фрикционными поверхностями друг друга. При этом отсутствует возможность установки между ними осей для смещенных по фазе вращения рабочих колес параллельно установленных основных узлов конструкции устройства. При зубчатой передаче вращения шесть рабочих шестерен просто не умещаются на опорном зубчатом колесе.
Основной узел устройства инерционного движителя работает следующим образом. Двигатель вращает ротор 3 описанной конструкции. Тот заставляет рабочие колеса 4 катиться без трения по своему опорному колесу. Дебалансный груз 5 каждого рабочего колеса 4 движется по циклоиде по отношению к круговой огибающей опорного колеса 2 или по кардиоиде по отношению к стороннему наблюдателю. Для простоты и компактности математических формул расчета технической эффективности движителя принято, что центр тяжести (центр массы) дебалансного груза 5 установлен на периметре рабочего колеса 4, масса груза равна единице измерения массы, угловая или линейная скорость движения рабочего колеса равна соответствующей единице измерения. Начало системы угловых координат совпадает с положением груза на периметре опорного колеса. В противоположном положении скорость груза равна удвоенной скорости рабочего колеса, поскольку так изменяется расстояние от груза до периметра опорного колеса. Эти крайние значения скоростей и другие промежуточные значения рассчитаны на ПЭВМ с помощью интегрированной вычислительной системы Mathcad.
Горизонтальная составляющая скорости перемещения груза пропорциональна линейной скорости центра рабочего колеса, расстоянию от опорного колеса до груза (амплитуда циклоиды по полной окружности опорного колеса), синусу угла между направлениями от центра рабочего колеса на центр опорного колеса и на груз. Наибольшие значения при 120 и при 240 угловых градусах (фиг.4).
Вертикальная составляющая скорости перемещения груза пропорциональна линейной скорости центра рабочего колеса, расстоянию от опорного колеса до груза (амплитуда циклоиды по полной окружности опорного колеса), косинусу угла между направлениями от центра рабочего колеса на центр опорного колеса и на груз. Наибольшие положительные (мешающие, противофазные, вредные воздействия) значения при ориентировочно 61,31 и при ориентировочно 303,69 угловых градусах. Наименьшие (нулевые) значения при 90 и при 270 угловых градусах.
Влияние мешающих составляющих противофазного движения грузов на разных рабочих колесах на пульсации результирующего тягового усилия движителя можно оценить по достаточно известным математическим формулам. Зависимость вертикальной составляющей скорости перемещения груза, установленного на первом рабочем колесе из четырех, смещенных по окружности опорного колеса на 90 градусов друг относительно друга:

Для второго по ходу вращения колеса зависимость вертикальной составляющей скорости перемещения груза, установленного на втором рабочем колесе из четырех:

Для третьего колеса зависимость вертикальной составляющей скорости перемещения груза, установленного на третьем по ходу вращения рабочем колесе из четырех:

Для четвертого колеса зависимость вертикальной составляющей скорости перемещения груза, установленного на четвертом по ходу вращения рабочем колесе из четырех:

Интегральное по контуру (по одному полному обороту груза или диска) значение тягового усилия для данного решения движителя почти вдвое больше, чем у прототипа: центр массы груза в прототипе вдвое быстрее движется при t=с=π, град.
Расчеты показывают, что для четырех дисков прототипа данное усилие: 1,7852·4=7,14. Для четырех рабочих колес движителя устройства: 3,1415·4=12,566. Следовательно, тяговое усилие движителя устройства больше, чем у прототипа в 12,566/7,14=1,76 раза. Прототип почти вдвое «слабее» потому, что при t=с=π/2, угл. град., у него только начинается смещение центра тяжести диска от поверхности опорного колеса, а в устройстве этот отрыв уже равен радиусу опорного колеса г. При t=с=π, угл. град., расстояние отрыва в прототипе г, в основном узле заявляемого устройства - 2 г. Если в прототипе почти вдвое увеличить или массу грузов, или радиусы опорных колес и дисков (по существу грузов), то тяговое усилие станет, как и у основного узла устройства. Но тогда у прототипа либо возрастет почти вдвое масса грузов и самой конструкции, и повысятся требования к прочности этой утяжеленной конструкции, либо увеличатся почти на 2 г габариты его обычной конструкции.
Таким образом, движитель устройства с 4-мя рабочими колесами:
- легче или миниатюрнее прототипа при той же тяге;
- развивает тяговое усилие вдвое сильнее прототипа при таких же габаритах и массе грузов.
Движитель устройства с 5-ю рабочими колесами:
- тянет на 25% сильнее прототипа, усиленного (с ухудшенными другими функциональными возможностями) либо по массе грузов, либо по габаритам;
- на 101% (76%+25%), то есть практически в два раза развивает тяговое усилие больше прототипа с одинаковыми для обеих конструкций скоростью движения его опорных колец (рабочих колес), массами дисков (грузов), габаритными размерами.
Инерционный движитель обеспечивает наращивание тягового усилия за счет увеличения количества основных узлов устройства при наименьшей сложности и стоимости его конструкции. Количество опорных колес, установленных концентрично друг другу, в данной конструкции инерционного движителя может быть сколь угодно большим для существенного увеличения суммарного тягового усилия устройства. Ограничение этого количества на практике обусловливается только габаритными размерами устройства и прочностными характеристиками его элементов.
При этом конструкция заявляемого устройства многократно проще, позволяет наращивать число опорных колес и, соответственно, основных узлов конструкции устройства только за счет увеличения длины осей рабочих колес (фиг.2). При этом конструкция устройства практически легко реализуема.
Таким образом, устройством достигается плавное, без рывков и пульсаций тягового усилия механическое перемещение объекта и возможность наращивания результирующего тягового усилия без существенного усложнения конструкции движителя при невысокой сложности и стоимости его конструкции.


Изобретение относится к области механизмов для преобразования энергии вращательного движения в поступательное перемещение устройств. Инерционный движитель устройства содержит корпус и конструкцию, включающую опорное колесо, расположенное в плоскости поступательного движения устройства и жестко связанное с корпусом, ротор, соединенный с двигателем, рабочие колеса, установленные на роторе с возможностью свободного вращения и принудительного качения по опорному колесу без скольжения, дебалансные грузы, каждый из которых в соответствующей фазе углового положения установлен на соответствующем рабочем колесе, имеющем диаметр опорного колеса. Конструкция снабжена соседними опорными колесами и рабочими колесами, предназначенными для качения без скольжения по соседним опорным колесам, концентрично с указанным опорным колесом. Оси вращения рабочих колес, предназначенных для качения без скольжения по соседним опорным колесам, проходят в промежутках между рабочими колесами, катящимися по соседнему опорному колесу. Такая же зеркально отраженная конструкция установлена в плоскости, перпендикулярной направлению поступательного движения устройства. Роторы зеркально отраженной конструкции предназначены для вращения по отношению к роторам упомянутой конструкции во встречном направлении. Технический результат - плавное, без рывков и пульсаций тягового усилия механическое перемещение устройства. 1 з.п. ф-лы, 4 ил.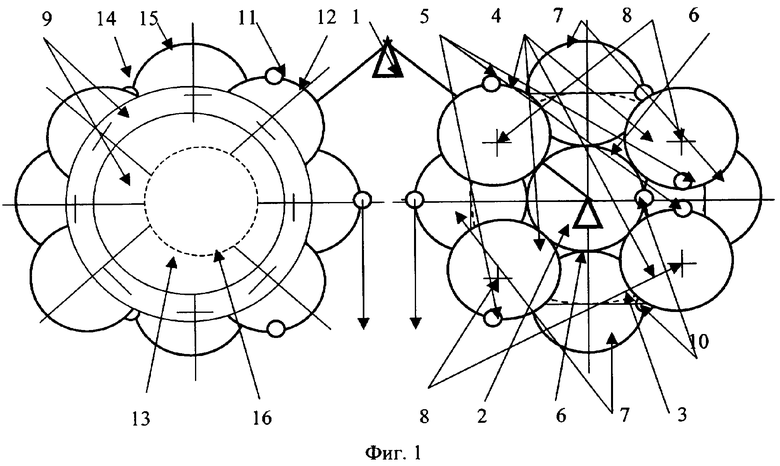
| RU 2066398 C1, 10.09.1996 | |||
| US 5831354 A, 03.11.1998 | |||
| DE 4312188 A, 20.10.1994. |

