Изобретение относится к движителям и может быть использовано в любом виде транспорта.
Известен движитель, в котором инерционные грузы перемещаются по всей внутренней окружности эллипсоидной направляющей, при этом скорость их перемещения постоянно различна относительно общего центра оси вала, в результате чего создается тяговое усилие.
Недостатком этого движителя является то, что тяговое усилие в нем создается на минимальную величину, так как имеет смещение оси вращения вала с грузами к одной из сторон окружности корпуса. В этом случае максимальный радиус вращения у наивысшей длины радиуса, по которому прокатываются грузы, имеет минимальную величину. При этом грузы со штоками прокатываются по всей внутренней окружности корпуса и не соединяются жестко с валом, за счет чего штоки с грузами быстро изнашиваются.
В предложенном движителе грузы со штоками в эллипсоидной направляющей прокатываются только в одном секторе наружной окружности. При этом взаимодействие штоков с грузами с поверхностью эллипсоидной направляющей позволяет грузам со штоками жестко соединиться в одном из секторов окружности движителя с осью вала. Это позволяет увеличить тяговое усилие на большей части окружности. Грузы со штоками, соединенные жестко с валом, описывают в этих секторах правильную цилиндрическую окружность с большим дебалансным эффектом, на большую величину, чем описанная в конструкции патента Франции.
Целью изобретения является увеличение маневренности и скорости, а также обеспечение устойчивого положения при авариях транспортного средства.
Силовая инерционная установка транспортного средства содержит корпус, в котором установлены в одном из секторов окружности эллипсоидная направляющая и приводной механизм по перемещению по ней инерционных дебалансных грузов, каждый из которых закреплен на штоке с опорными роликами, размещенном перпендикулярно оси вращения вала с возможностью радиального возвратно-поступательного перемещения, при этом, эллипсоидная направляющая выполнена с прорезью, внутри которой установлены диаметральные штоки, пересекающие выполненные на валу привода отверстия-направляющие, инерционные грузы неподвижно закреплены на обоих выступающих концах каждого штока, при этом опорные ролики установлены на инерционных грузах, а на внешней стороне эллипсоидной направляющей выполнены ограничительные дорожки, которые предназначены для жесткого соединения штоков с грузами в одном из секторов вала с опорами вала, при этом ограничительные дорожки для управления центробежными силами транспорта в какую-либо сторону имеют для этой цели свободный ход вокруг оси вала, а для звукового поглощения и амортизации на поверхностях опорных роликов, ограничительной дорожки эллипсоидной направляющей, а также на штоках и отверстиях направляющих вала нанесены слои из амортизирующего и звукопоглощающего материала.
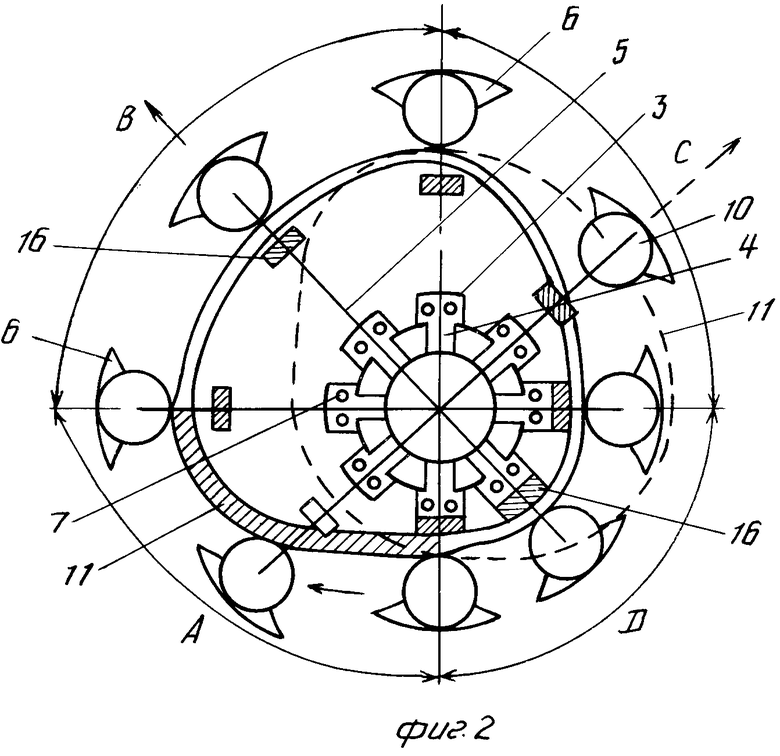
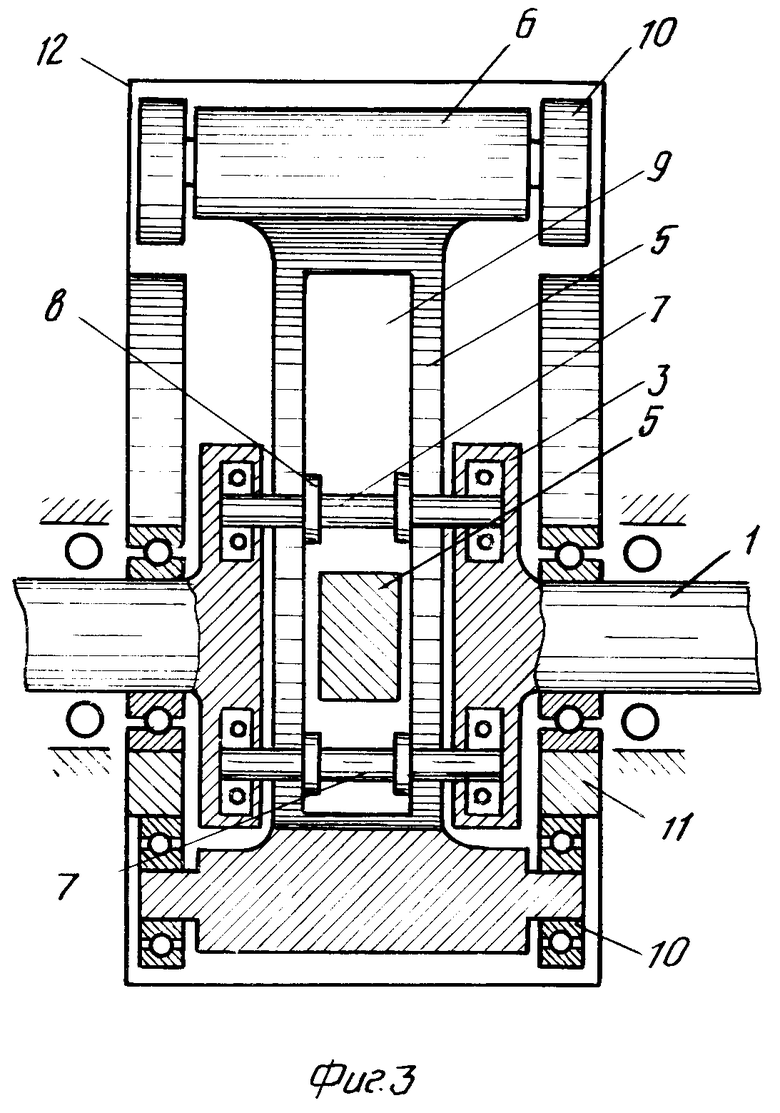
На фиг. 1 изображена силовая инерционная установка транспортного средства, изометрия; на фиг. 2 схема движителя с дебалансными грузами, которые прокатываются по наружной стороне эллипсоидной ограничительной дорожке, за счет которой штоки с грузами переталкиваются из сектора С в сектор А и жестко соединяются с опорами вала в секторе D; на фиг. 3 показан разрез движителя вдоль вала, в котором вращаются штоки с грузами, отделенные друг от друга зазорами; на фиг. 4-9 различные схемы движителя, которые изменяют направление центробежных сил при помощи корпусов некруглых окружностей, т.е. эллипсоидной ограничительной дорожки, которые свободно могут разворачиваться вокруг оси вала в любую сторону, другое положение ограничительных дорожек показано пунктирной линией.
Силовая инерционная установка транспортного средства содержит двигатель, соединенный через вариатор или коробку скоростей с валами 1 и 2, на которых размещены подшипника качения или скольжения, жестко встроенные в корпус транспортного средства. Перпендикулярно плоскости валов на равном удалении от центра тяжести (Ц.Т.) транспортного средства (Т.С.) жестко сидят коробки 3 с радиальными направляющими прорезями 4 (см. фиг. 2), в которых свободно перемещаются штоки 5 с балансными грузами 6 инертной массы, расположенными на обоих концах штоков. В коробке вала 3 вдоль движения штоков с грузами через ось вала содержатся опорные ролики 7 (на фиг. 3 показан разрез плоскости вдоль вала), воспринимающие нагрузку штоков при их движении. При этом опорные ролики 7 выполнены с направляющими ограничивающими выступами или дорожками 8, которые входят в прорези штоков 9 (см. фиг. 3), в которых двигаются другие штоки с зазорами между штоками и коробками 3.
Часть балансных грузов 6 выполнена в виде опорных роликов 10, расположенных с двух сторон на обоих концах штоков 6, которые прокатываются или скользят по наружной стороне корпуса эллипсной окружности 11 (см. фиг. 2) только в секторе окружности А, эллипс отмечен штриховкой. В секторах В, С, D ролики не взаимодействуют с поверхностью окружности. При этом корпуса эллипсных окружностей 11 располагаются в каждой плоскости с обеих сторон вращающихся штоков 5 (см. фиг. 1) и соединены между собой жестко корпусами 12, которые свободно сидят в опорах на валах и могут перемещаться вокруг валов в любую сторону с помощью шестерни 13, червячного вала 14, которые вращаются гидравлическим двигателем 15 или электродвигателем. Взаимодействие штоков 5 с эллипсной окружностью 11 в секторе А (см. фиг. 2) позволяет опорам 16 жестко соединиться с коробкой вала 3 в секторе D, за счет чего создается разность центробежных сил вращающихся грузов 6 между секторами В и D. Во все двигающиеся, трущиеся поверхности движителя подаются смазочные материалы.
Работает силовая инерционная установка следующим образом (см. фиг. 1 и 2). Двигателем через вариатор вращаются валы 1 и 2 с расположенными поперек оси вала коробками 3, внутри которых радиально расположены проходящие через ось валов прорези 4, через которые двигаются штоки 5 с грузами инертной массы 6, находящиеся на каждом конце штоков. Для снижения габаритов, объема и вибрации движителя каждая плоскость с вращающейся инертной массой имеет несколько штоков 5 (см. фиг. 3), которые двигаются один в другом через прорези 9, выполненные в штоках. Плоскостей на валах может быть любое парное количество. На фиг. 1 показано четыре плоскости, расположенные на равном удалении от центра тяжести (Т.С.). Центр тяжести показан крестиком. При этом каждый шток, расположенный один против другого между плоскостями, должен располагаться под разными определенными градусами по отношению друг к другу, за счет чего на Т.С. максимально снижается вибрация.
Для снижения трения между штоками 5 и коробкой 3 каждый шток взаимодействует с опорными роликами 7 (см. фиг. 3), которые выполнены с направляющими ограничивающими дорожками 8, входящими своими выступами в прорези штоков 9, за счет чего обеспечивается определенный зазор между штоками 5 и корпусами коробок 3. Все штоки с грузами имеют одинаковый вес. На концах грузов 6 имеются опорные ролики 10 (см. фиг. 1 и 2), которые при вращении в секторе окружности А параллельно и плавно накатываются на наружную сторону эллипсной окружности 11, имеющую в начале взаимодействия с опорами минимальный радиус от поверхности эллипсной окружности до оси вала (см. фиг. 2). При движении штоков с грузами в секторе А к сектору окружности В (движение штоков отмечено стрелочками) радиус эллипсной окружности 11 увеличивается, за счет чего штоки с грузами 6 совершают вращение с переменным радиусом, переталкиваясь через ось вала из сектора окружности С в сектор А. Так как ось сектора эллипсной окружности смещена относительно оси вала на определенное расстояние, то между сектором В и сектором окружности D возникает разность центробежных сил вращающихся грузов 6, за счет чего в секторе окружности В возникает тяговое усилие. При этом сектор А при вращении штоков с грузами переталкивает их из сектора окружности С в сектор А, заставляет штоки своими опорами 16 жестко соединяться с коробкой вала 3 в секторе окружности D. Штоки с грузами описывают в секторах В и D при вращении вокруг вала правильную цилиндрическую окружность. Так как в секторе В грузы 6 вращаются по окружности с радиусом в два раза большим, чем в секторе D (это условная величина), то центробежные силы инертной массы всегда будут направлены в сторону сектора В (центробежные силы показаны стрелочкой). Центробежную силу можно рассчитать на основании второго закона Ньютона F= 
Условимся, что масса грузов двух штоков, находящихся при движении постоянно в секторе окружности В, равна 2 кг;  скорость грузов, двигающихся в секторе В, составляющем четвертую часть окружности; r радиус, описываемый грузами в секторе В, равен 20 см. Пусть скорость вращения валов будет 1200 об/мин, 20 об/с, при этом скорость грузов будет равна 6,3 м/с.
скорость грузов, двигающихся в секторе В, составляющем четвертую часть окружности; r радиус, описываемый грузами в секторе В, равен 20 см. Пусть скорость вращения валов будет 1200 об/мин, 20 об/с, при этом скорость грузов будет равна 6,3 м/с.
F  300 кг.
300 кг.
Центробежная сила действует только в одной плоскости в секторе В, в четырех плоскостях Ц.С. будет равна 1200 кг, что вполне достаточно, чтобы поднять в воздух небольшой летательный аппарат, но если увеличить скорость Ц.С. в два раза, то в четыре раза возрастет Ц.С. и будет равна 4800 кг. Но и это не предел, изменяя скорость вращения грузов можно изменять скорость движения и грузоподъемность летательного аппарата. Чтобы изменять направление Ц.С. на Т. С. (транспортном средстве) в какую-либо сторону, нужно осуществлять это способом перемещения эллипсной окружности 11 вокруг оси вала (см. фиг. 2). На схеме пунктирной линией показано другое положение некруглой окружности, за счет которой направление Ц.С. инертной массы направлено в сторону сектора окружности С.
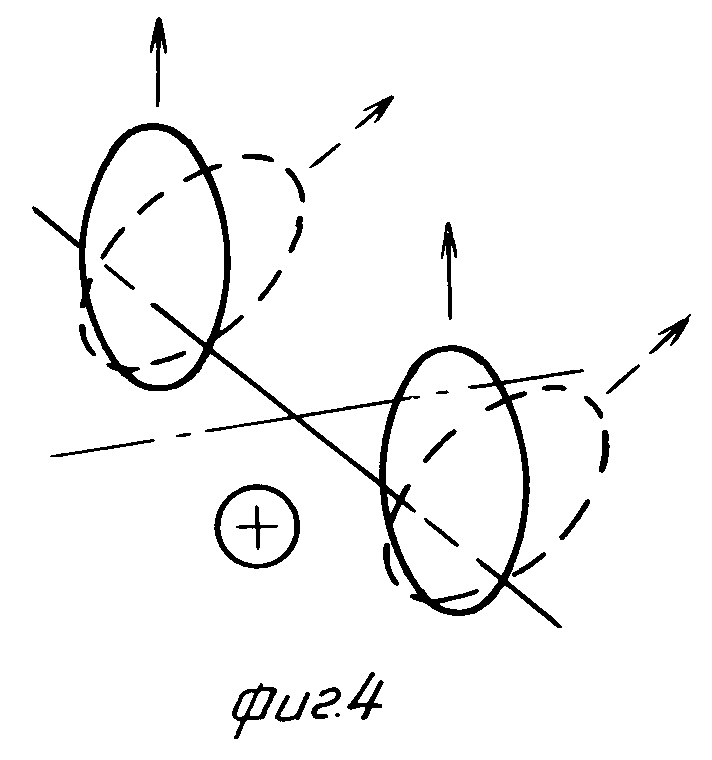
На фиг. 1 показаны механизмы, которые изменяют положение некруглых окружностей вокруг вала. Электродвигателем или гидродвигателем 15 вращается червячный вал 14, соединенный с шестерней 13, которые жестко соединены с эллипсными окружностями 11. Вращение окружностей осуществляется как в одну, так и в другую сторону в зависимости от направления движения Т.С. На фиг. 4 и 5 показана схема движителя с одним валом, расположенным поперек движения на Т. С. и двумя плоскостями вращения грузов. Но при вращении грузов возникает реактивный момент, который может перевернуть Т.С. Это можно предотвратить, если использовать между двумя вращающимися плоскостями еще одну плоскость вращения грузов, вращающуюся в противоположную сторону. Такой реактивный момент устраняется на вертолете, где вращаются два ротора по отношению друг к другу в противоположные стороны. Управлять движением Т.С. можно изменяя направление Ц. С. с помощью эллипсной окружности, вращая ее вокруг вала на определенный градус.
На фиг. 4 стрелочками показано направление Ц.С. где летательный аппарат может зависать над землей или двигаться вверх или вниз. Пунктирной линией и стрелочками показано другое положение эллипсных окружностей, за счет которого Ц. С. изменяет направление, вследствие чего Т.С. может двигаться вперед или назад.
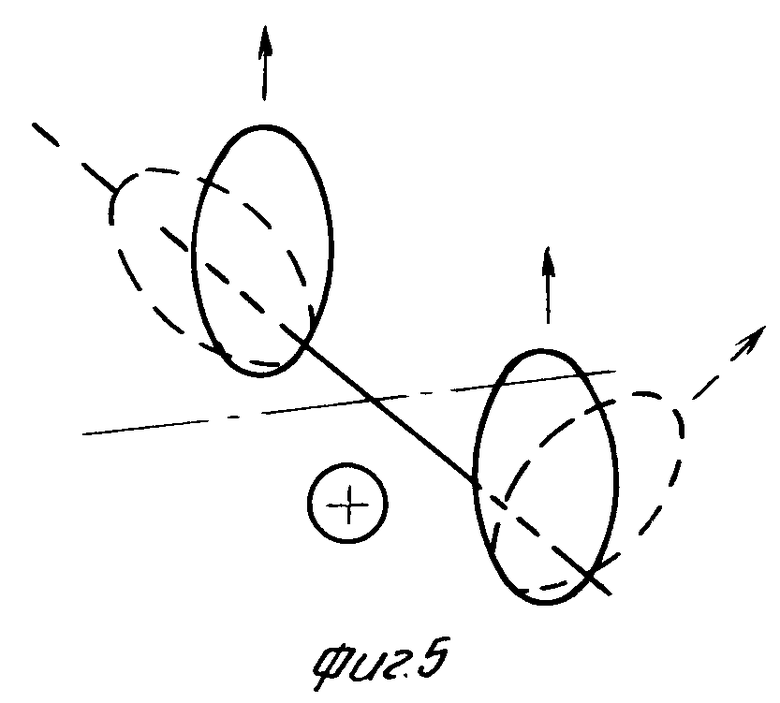
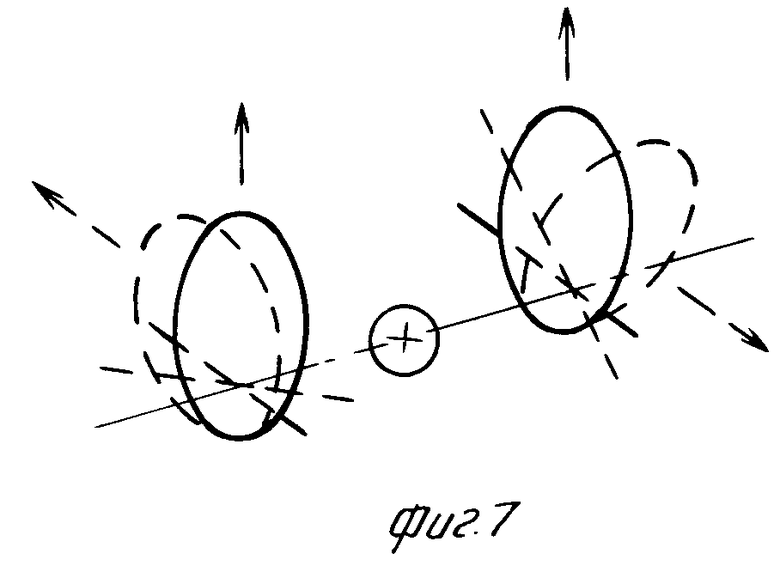
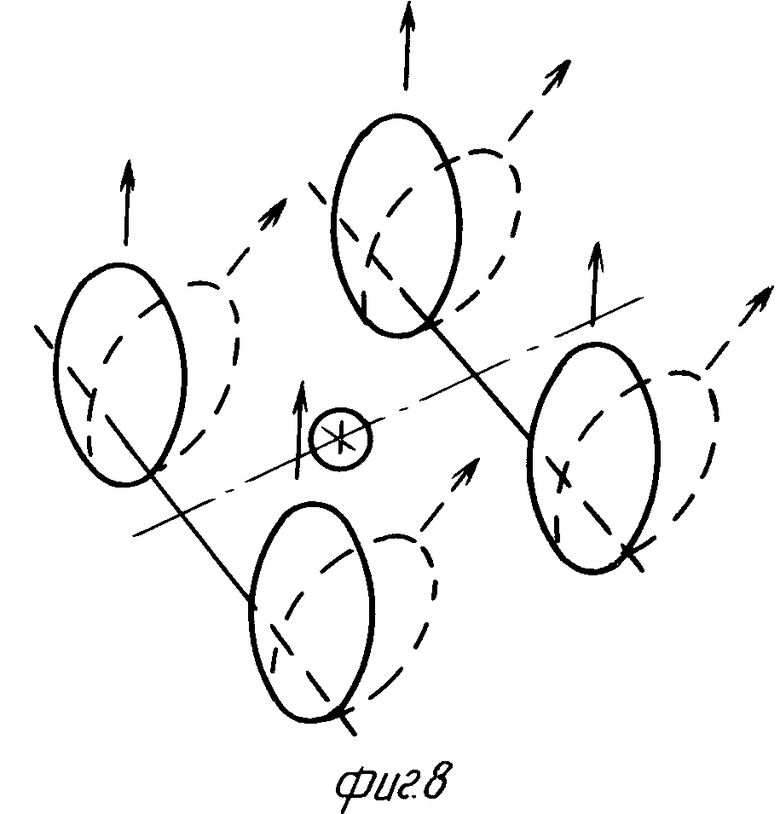
На фиг. 5 показано направление Ц.С. двух плоскостей, развернутых в разные стороны по отношению друг к другу, за счет чего Т.С. может разворачиваться в ту или в другую сторону. При этом продольные колебания Т.С. вокруг вала при движении будут сохраняться. Этот эффект можно убрать, располагая два вала с двумя плоскостями вдоль движения Т.С. на равном удалении от центра тяжести (см. фиг. 6 и 7), Движение Т.С, показано штрихпунктирной линией. На фиг. 6 так же, как и на фиг. 4 управление Т.С. идентичны. На фиг. 7 для того, чтобы развернуть Т.С. в какую-либо сторону, нужно разворачивать валы с плоскостями вращения грузов. Их расположение показано пунктирной линией. Такое расположение двух плоскостей с грузами может вызывать боковые поперечные колебания при движении Т.С. Самое устойчивое положение при движении Т.С. осуществляется при расположении четырех плоскостей вращающихся грузов, расположенных на двух валах на равном удалении от центра тяжести Т.С. (см. фиг. 8 и 9). За счет этого на Т.С. отсутствуют как продольное, так и поперечное колебания.
На фиг. 8 показано управление Ц.С. которое идентично управлению, показанному на фиг. 4 и 6. На фиг. 9 управление немного отличается от других схем. Допустим, если развернуть Т.С. в какую-либо сторону, при движении или стоя на одном месте вокруг Ц.Т. нужно две накрест лежащих плоскости вращения грузов развернуть по отношению друг к другу в разные стороны, как показано на схеме, за счет чего Т.С. начнет разворачиваться вокруг Ц.Т. Две другие накрест лежащие плоскости могут служить для поддержания движения, как показано пунктирными стрелочками, которые направлены в одну и ту же сторону, или направить Ц.С. в вертикальное положение для зависания над землей с разворотом, или одновременное движение вверх или вниз с разворотом, что нельзя сделать двумя плоскостями. Таким образом, четырьмя плоскостями вращения инертных масс можно управлять Т.С. во всех направлениях и в любых средах, с преимуществом по отношению к другим схемам. Для смягчения звуков и ударов между штоками с опорами 16 и коробкой вала 3 поверхности их могут быть покрыты амортизационными и звукопоглощающими материалами, на схеме не показано.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОЛУЧЕНИЯ НАПРАВЛЕННЫХ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ, СПОСОБ ПРЕОБРАЗОВАНИЯ НАПРАВЛЕННЫХ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ В ОДНОНАПРАВЛЕННОЕ ПРЕРЫВИСТОЕ ПОСТУПАТЕЛЬНОЕ ДВИЖЕНИЕ, СПОСОБ УПРАВЛЯЕМОГО ПЕРЕМЕЩЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА В ЗАДАННОМ НАПРАВЛЕНИИ И УСТРОЙСТВА ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТИХ СПОСОБОВ | 2004 |
|
RU2280513C2 |
| ДВИЖИТЕЛЬ ИНЕРЦИОННО-РЕАКТИВНОГО ДЕЙСТВИЯ | 1998 |
|
RU2146631C1 |
| ДВИЖИТЕЛЬ ГУСЕНИЧНЫЙ | 2012 |
|
RU2511192C1 |
| МОСТОВОЙ ШАГАЮЩИЙ ДВИЖИТЕЛЬ | 2011 |
|
RU2501703C2 |
| ДВИЖИТЕЛЬ, ДИСКОЛЕТ, ДИСКОЛЕТ БОЛЬШОЙ ГРУЗОПОДЪЕМНОСТИ, ПОДВОДНЫЙ ПОДЪЕМНИК-БУКСИР, ДВИЖИТЕЛЬ ПОДВОДНЫХ АППАРАТОВ | 2014 |
|
RU2586180C2 |
| Стенд для испытания гусеничного движителя | 1990 |
|
SU1755091A1 |
| Колесно-лопастной движитель транспортного средства | 2019 |
|
RU2711134C1 |
| РОЛИКОВОЕ СРЕДСТВО ПЕРЕДВИЖЕНИЯ | 2019 |
|
RU2745724C2 |
| Движитель транспортного средства | 1977 |
|
SU730618A1 |
| Стенд для испытания пневматических шин и упругих элементов подвесок транспортных средств | 2021 |
|
RU2765390C1 |



Использование: инерционно импульсные установки, применяемые в тракторной технике. Сущность изобретения: установка содержит эллинсоидную направляющую, выполненую с прорезью, внутри которой установлены диаметральные штоки, пересекающие выполненные на валу привода отверстия направляющие, инерционные грузы неподвижно закреплены на обеих выступающих концах каждого штока, при этом опорные ролики установлены на инерционных грузах, а на внешней стороне эллипсоидной направляющей выполнены органичительные дорожки, кроме того, на поверхности опорных роликов, ограничительной дорожки эллипсоидной направляющей, на штоках и отверстиях направляющих вала нанесены слои из амортизирующего и звукопоглащающего материала, а для управления движением, транспортного средства установка снабжена механизмом поворота эллипсоидной направляющей относительно вала привода. 2 з. п. ф-лы, 9 ил.
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ И ИЗМЕРЕНИЯ МАКСИМУМА СИГНАЛА | 1990 |
|
RU2020488C1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
