Изобретение относится к области измерения магнитного момента, намагниченности и магнитной восприимчивости, в частности к измерению индуктивного и постоянного моментов крупногабаритного тела (например, корабля). Наряду с магнитным моментом в технике оперируют термином "намагниченность", "средняя намагниченность" или "удельная намагниченность", которая представляет собой магнитный момент тела, деленный на его объем.
Известен способ разделения намагниченности корабля на индуктивную и постоянную части путем измерений и обработки результатов измерения магнитных полей корабля при его проходе на прямых и обратных главных магнитных курсах (Норд - Зюйд, Ост - Вест) в магнитном поле Земли [А.С.Totterdell. Operational Aspects of a Transportable DG Range // Underwater Measuring Ranges and Techniques, 1990 February, P.391-398. Транспортируемый магнитоизмерительный стенд (эксплуатационные возможности) // Труды конференции по методам размагничивания кораблей и подводным магнитоизмерительным стендам]. Из пары результатов измерения на главных курсах определяют индуктивную и постоянную (остаточную) части намагниченности, но определяют их неполностью. Полусумма результатов дает постоянную часть, а полуразность - индуктивную часть. Каждая часть - вектор, которую принято выражать через три числа - продольную, поперечную и вертикальную компоненты в системе координат корабля. Продольная ось системы координат направлена из центра корабля к носу, поперечная - к левому борту, вертикальная - вниз. Метод, описанный у Тоттерделя, позволяет разделить только продольные и поперечные компоненты индуктивной и постоянной частей намагниченности, но не позволяет разделить вертикальные компоненты его, так как на любом курсе корабля не меняется значение вертикальной компоненты поля Земли и, соответственно, вертикальной компоненты намагниченности корабля. Тоттердель [1990. Р.391] отмечает важность проблемы разделения вертикальной компоненты и указывает три способа ее решения:
«1. Постройка дорогостоящего стационарного стенда с системой колец для изменения вертикальной компоненты магнитного поля, действующего на корабль, неподвижно стоящий в центре системы колец. Для проведения измерений неподвижного корабля необходима обширная матрица ("огород") датчиков под кораблем.
2. Нормирование соотношения между постоянной и индуктивной вертикальными компонентами намагниченности, опираясь на эмпирические данные. Например, предположение, что эти компоненты обеих частей равны друг другу.
3. Разработка транспортируемой системы, оснащенной измерительными и вычислительными средствами, не уступающими современной стационарной системе с компьютерным управлением. Транспортируемая система позволит оператору измерять корабли и калибровать их размагничивающие обмотки оптимальными значениями токов для фактических районов действия».
Рассмотрим эти способы внимательнее.
Пункт 1 - малоприемлем в силу значительных материальных затрат на его реализацию.
Пункт 2. Предположение о равенстве вертикальных индуктивной и постоянной намагниченностей корабля нуждается в комментарии. За рубежом давно используются "флэшинг" (с 1939 г.) и "вайпинг" (с 1940 г.) - методы размагничивания кораблей. Они заключаются в том, что при размагничивании кораблю искусственно придают постоянную вертикальную намагниченность так, чтобы она компенсировала вертикальную индуктивную. Такая компенсация нестабильна, поскольку нестабильна сама постоянная намагниченность (несмотря на свое название "постоянная"), особенно искусственно введенная. Кроме того, компенсация нарушается при изменении широты плавания, поскольку с широтой меняется вертикальная индуктивная намагниченность корабля. Т.е. пример, приведенный Тоттерделем, не дает радикального решения проблемы.
Пункт 3. По существу, здесь предлагается вообще обойтись без раздельного контроля вертикальных компонент и перенастраивать систему размагничивания корабля каждый раз, когда значительно изменилась его широта плавания, с помощью стенда, транспортируемого к кораблю в любую точку Земли. Т.е. пункт 3 также не содержит решения проблемы разделения вертикальных компонент постоянной и индуктивной намагниченностей.
Известен также "Способ раздельного измерения остаточной и индуктивной намагниченности образцов горных пород" [Ю.И.Спектор. Авторское свидетельство №121875. "Бюллетень изобретений" №16 за 1959 г.] и "Способ раздельного измерения остаточной и индуктивной намагниченности образцов горных пород с помощью двух одинаковых магнитомодуляционных датчиков" [Ю.И.Спектор. Авторское свидетельство №123637. "Бюллетень изобретений" №21 за 1959 г.]. Способы Спектора [1959] основаны на измерениях магнитных полей образца при его вращениях вокруг всех его осей. Но для крупногабаритного тела вращения, кроме вращения вокруг вертикальной оси, как в примере с кораблем, практически неосуществимы.
Следует также отметить, что само разделение намагниченности (а также магнитного момента) основано на модели Пуассона (1824 г.) о представлении магнитного поля судового железа в виде суммы индуктивной и постоянной частей. Кроме того, описываемый ниже заявляемый способ во многом основан на учении Аркадьева о магнитной восприимчивости тела, как функции восприимчивостей формы и материала тела [В.К.Аркадьев. Электромагнитные процессы в металлах. Ч.1. 1935 г. ОНТИ].
Известен также магнитометрический метод измерения магнитного момента крупногабаритного ферромагнитного тела с помощью дифференциального магнитометра [Семенов В.Г., Сонина В.Э. Анализ методов измерения магнитных моментов // Метрология. 1992. №8. С.3-46]. Этот метод позволяет (косвенно) измерить продольные и поперечные компоненты индуктивного и постоянного магнитных моментов тела, но, как и метод Тоттерделя, не позволяет разделить вертикальные составляющие момента. По совокупности существенных признаков в качестве ближайшего аналога заявляемого способа принят метод или способ измерения магнитного момента [Семенов и Сонина. 1992. С.7].
Известный способ включает измерения магнитных моментов корабля при поворотах его вокруг вертикальной оси в магнитном поле Земли (например, на 90, 180, 270 градусов) и определение из результатов измерений продольных и поперечных индуктивного и постоянного магнитного момента.
Причиной, препятствующей достижению указанного ниже технического результата при использовании известного способа, является недостаточность поворотов вокруг вертикальной оси тела для раздельного измерения всех компонент (включая вертикальные) магнитного момента тела.
Задачей, на решение которой направлено заявляемое изобретение, является упрощение процедуры измерения всех компонент (включая вертикальные) индуктивного и постоянного магнитных моментов крупногабаритного ферромагнитного тела. Технический результат, получаемый при осуществлении изобретения, заключается в измерении всех компонент индуктивной и постоянной частей магнитного момента крупногабаритного ферромагнитного тела удлиненной формы без единого поворота его, не считая первого вспомогательного поворота для определения продольной восприимчивости тела.
Указанный технический результат достигается тем, что в заявляемом способе раздельного измерения индуктивного и постоянного магнитных моментов крупногабаритного ферромагнитного тела удлиненной формы путем поворота его в магнитном поле Земли из положения продольной осью на Север в противоположное положение и измерений соответствующих продольных компонент магнитных моментов тела МС1, МЮ1, в отличие от известного способа, измеряют также продольные компоненты индукции магнитного поля Земли ВС1 и ВЮ1, а на магнитной модели тела уменьшенного масштаба 1/k заблаговременно определяют матрицу магнитной восприимчивости kо, объемы ферромагнитных частей модели vм и тела ν=k3vм, после чего находят продольную компоненту восприимчивости тела kо11т по формуле
kо11т=μ0(МС1+МЮ1)/ν(ВС1+ВЮ1),
где μ0=4π×10-7 Гн/м - магнитная постоянная,
в дальнейшем вновь измеряют поле Земли В и магнитный момент произвольно ориентированного тела М, который делят на индуктивный Ми и постоянный Мп магнитные моменты по формулам
где  - диагональная матрица восприимчивости тела;
- диагональная матрица восприимчивости тела;
ko22, kо33 - поперечная и вертикальная компоненты модельной восприимчивости ko.
На фиг.1 изображена схема магнитометрического метода измерения восприимчивости модели.
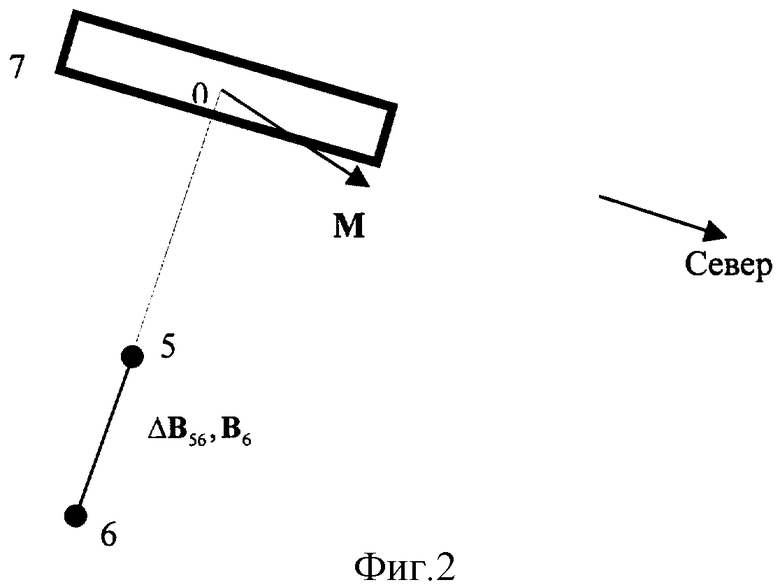
На фиг.2 изображена схема магнитометрического метода измерения магнитного момента крупногабаритного тела удлиненной формы.
Схема на фиг.1 включает магнитную модель 4 крупногабаритного тела в уменьшенном масштабе с продольной 1, поперечной 2, вертикальной 3 осями, измерительный 5 и компенсационный 6 датчики модельного трехкомпонентного дифференциального магнитометра, которые расположены на одной линии, проходящей через центр 0 модели 4. Ось 1 модельных датчиков 5, 6 (с ортогональными компонентами) направлена на Север, ось 3 - по вертикали. В исходном положении оси датчиков 5, 6 параллельны одноименным осям модели 4.
Схема на фиг.2 включает крупногабаритное ферромагнитное тело удлиненной формы 7, трехкомпонентные измерительный 1 и компенсационный 2 датчики дифференциального магнитометра, которые расположены на одной линии, проходящей через центр 0 крупногабаритного тела 7. Ось 1 датчиков 5, 6 направлена на Север, ось 3 - по вертикали.
Заявляемый способ осуществляется следующим образом. Изготовляют или используют имеющуюся точную магнитную модель (Первая такая модель построена в 1937 г. в Великобритании. В годы Второй мировой войны строились магнитные модели в масштабе от 1/96 для линкоров и океанских лайнеров, таких как "Куин Мери" до 1/24 для тральщиков [Gossage R.G. The Use of Ship Models Magnetically to Scale in Degaussing Research // The Journal of the Institution of Electrical Engineers. 1946. #70. P.447-452. Использование масштабных магнитных моделей в исследованиях по размагничиванию кораблей]. В конце века масштаб моделирования иногда достигал 1/4, например, при постройке американской подводной лодки "Виргиния" [The Many Faces of Virginia // Jane's International Defence Review. 2000. #12. Р.46-51. Многоликая Виргиния]. Стоимость изготовления модели не менее чем в k3 ниже стоимости натуры. Стоимость изготовления ПЛ "Виргиния" оценивалась в 1,7 млрд. долларов. Тогда стоимость модели, например, "Виргинии" должна находиться приблизительно в пределах от 2 тыс. до 30 млн. долларов в зависимости от выбора величины k. Т.е. модель может быть и дешевой, и дорогой в зависимости от масштаба.) 4 крупногабаритного тела 7 в уменьшенном масштабе 1/k, где k - отношение одноименных линейных размеров натуры 7 и модели 4. Материал одноименных частей натуры 7 и модели 4 одинаков. Опираясь на представления Пуассона (и Аркадьева), магнитный момент модели 4 можно выразить в следующем виде:

где Ми - индуктивная часть магнитного момента модели 4, Ам2;
Мп - постоянная часть магнитного момента модели 4, Ам2;
νм - объем ферромагнитных частей модели 4, м3;
 - диагональная матрица восприимчивости (тела) модели 4;
- диагональная матрица восприимчивости (тела) модели 4;
ko11, ko22, ko33 - продольная, поперечная и вертикальная компоненты восприимчивости соответственно осям 1, 2, 3;
В - внешняя индукция однородного магнитного поля, воздействующего на модель 4, например индукция поля Земли, Тл.
В.К.Аркадьев ввел категории магнитных восприимчивостей тела, формы и материала и показал, что восприимчивость тела определяется восприимчивостью формы (тела) и восприимчивостью материала (тела). Для разомкнутых ферромагнитных тел удлиненной формы восприимчивость тела в продольном направлении определяется восприимчивостью материала, а в боковых (поперечном и вертикальном) направлениях - восприимчивостью формы. Поэтому поперечная и вертикальная восприимчивости тела натуры и модели должны практически совпадать друг с другом, поскольку натура и ее модель имеют одинаковую форму и выполнены из одинакового (ферромагнитного) материала, несмотря на допускаемые различия восприимчивостей материала натуры и модели. Это значит, что поперечную и вертикальную компоненты восприимчивости ko целесообразно определить на модели. Продольную компоненту можно и лучше определить на натуре, поскольку она зависит от восприимчивости материала. Восприимчивости материала модели и натуры могут значительно (±20%) отличаться друг от друга, даже для одного и того же сорта материала.
С помощью модели 4 определяют диагональную матрицу восприимчивости тела 7 ko через измерения магнитного момента модели Мм при вращении модели 4 в поле Земли с индукцией В (см. (1)). Эти измерения проиллюстрированы схемой на фиг.1.
Уравнение измерения магнитного момента модели 4 [Семенов В.Г., Сонина В.Э. Анализ методов измерения магнитных моментов // Метрология. 1992. №8. С.3-46] имеет вид:

где Мм - магнитный момент модели 4, Ам2;
μ0=4π×10-7 Гн/м - магнитная постоянная;
R1 - расстояние от измерительного датчика 5 до центра модели 0, м;
s=R1/R2;
R2 - расстояние от компенсационного датчика 6 до центра модели 0, м;
n=R10/R1=R20/R2=(α β γ) - единичный вектор направления;
α, β, γ - направляющие косинусы соответствующих единичных векторов;
nn=(αn βn γn) - диада из единичных векторов n;
ΔВ56 - приращение индукции магнитного поля модели 4 между точками 5 и 6 - показания компонент измерительных каналов модельного дифференциального магнитометра, необозначенного на фиг.1 для простоты рисунка, Тл.
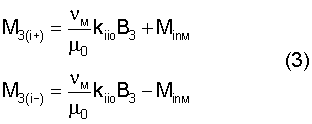
Уравнение (2) справедливо в любой системе координат и при любой ориентации модели 4. Таким образом, по приращению индукции ΔВ56 и векторам расстояний R10=R1n и R20=R2n, измеренным в некоторой системе координат, в той же системе координат (косвенно) измеряют по уравнению (2) магнитный момент модели Мм. Затем измеряют или вычисляют объем ферромагнитных частей модели νм. Компоненты матрицы восприимчивости модели могут быть найдены разными способами. Например, модель ориентируют по очереди каждой осью i=1, 2, 3 по и против вертикали и каждый раз измеряют вертикальную компоненту магнитного момента модели М3(i+) при ориентации по вертикали и M3(i-) - против вертикали, а также измеряют вертикальную компоненту магнитного поля Земли B3 при удаленной модели 4 с помощью компенсационного датчика 6 модельного дифференциального магнитометра.
Выбор ориентации по вертикали объясняется тем, что вертикальная компонента поля Земли больше продольной (на широте Санкт-Петербурга более чем в два раза).
Согласно (1)
Откуда находят все три компоненты восприимчивости модели

Может возникнуть вопрос, почему в способе Тоттерделя [1990. Р.391] для выделения индуктивной части используют полуразность результатов измерений, тогда как в (4) - полусумму. Различие объясняется выбором системы координат: у Тоттерделя выбрана система координат тела (СКТ), а в (3) и (4) - система координат магнитометра (СКМ) 5, 6. Если (3) переписать в СКТ, то каждый член второго уравнения в (3) поменяет знак и в соотношении, аналогичном (4), появится полуразность магнитных моментов, измеренных в СКТ, а значения найденных восприимчивостей не изменятся.
Далее по объему ферромагнитных частей модели νм находят объем ферромагнитных частей тела 7 ν=k3νм, поскольку масштабный коэффициент k для модели известен. Затем по уравнению измерения (2) измеряют магнитный момент тела (натуры) 7 МС и продольную компоненту магнитного поля Земли BС1 при направлении продольной оси тела 7 на (магнитный) Север. Поворачивают тело 7 вокруг его вертикальной оси на 180 градусов и измеряют его магнитный момент МЮ в новом положении и соответствующую ему по времени продольную компоненту поля Земли ВЮ1. Компоненты поля Земли меняются во времени (чаще всего очень незначительно). После чего определяют продольную компоненту восприимчивости тела 7 по аналогии с (4) по формуле:
 ,
,
где МС1, МЮ1 - продольные компоненты магнитных моментов МС и МЮ, измеренных в СКМ;
ВС1, ВЮ1 - соответствующие продольные компоненты полей Земли ВС и ВЮ, измеренных в СКМ с помощью компенсационного канала дифференциального магнитометра.
Компенсационный канал дифференциального магнитометра измеряет сумму полей Земли В и тела в точке 6 Вт6

По известным магнитному моменту тела, например МС, и радиус-вектору между центром 0 и точкой 6, т.е. R06=R2n, можно рассчитать дипольное поле тела в точке 6
и внести на него поправку в (6), т.е. найти поле Земли.

Как правило, поправка мала. Аналогично находят поле Земли ВЮ.
В дальнейшем измеряют поле Земли В и магнитный момент произвольно ориентированного тела М, по которым определяют (т.е. косвенно измеряют) искомые индуктивный Mи и постоянный Мп магнитные моменты тела:
где  - сборная диагональная матрица восприимчивости;
- сборная диагональная матрица восприимчивости;
kо11т - продольная компонента восприимчивости тела, определенная по формуле (5);
kо22 и ko33 - поперечная и вертикальная компоненты восприимчивости модели, определенные по соотношениям (4).
Сборную матрицу восприимчивости определяют однажды, а разделение (8) много раз повторяют в дальнейшем без вспомогательных поворотов тела.
В качестве иллюстрации к заявляемому способу рассмотрим следующий расчетный пример. Известна (эмпирическая) формула для расчета проницаемости (восприимчивости) формы некоторых типов разомкнутых сердечников [М.А.Розенблат. Магнитные элементы автоматики и вычислительной техники. 1966. М.: Наука]. Например, для полого цилиндра кругового сечения ее компоненты могут быть записаны в следующем виде:

где m11 - продольная компонента проницаемости (восприимчивости) формы;
λ=l/de, a=di/de,
l - длина цилиндра;
de, di - внешний и внутренний диаметры цилиндра;
m22, m33 - боковые (поперечная и вертикальная компоненты) восприимчивости формы.
Соответственно запишем компоненты восприимчивости тела:
где χ - восприимчивость материала.
Для наиболее распространенного типа судостроительной стали χ=160 [А.П.Латышев. Теория размагничивания. Ч.Л. 1960].
Результаты расчета восприимчивостей полого цилиндра даны в Таблице 1.
Результаты расчета (см. Таблицу 1) показывают, что для ферромагнитного тела удлиненной формы продольная компонента восприимчивости тела ko11 меняется с изменением восприимчивости материала, но боковые компоненты восприимчивости ko22, ko33 почти независят от изменений восприимчивости материала χ и от изменений второстепенных параметров формы, например de/di и λ.
Компоненты восприимчивости тела могут быть рассчитаны только для некоторых типов тел правильной или идеализированной формы. Для тел неправильной формы они не могут быть рассчитаны, но могут быть измерены по модели 4 крупногабаритного тела 7 с помощью методов (2)-(4) по схеме на фиг.1. В общем случае для удлиненного тела неправильной формы результаты измерения поперечной и вертикальной компонент, в отличие от расчетов ko22=ko33 в Таблице 1, будут различными ko22≠ko33. Результаты точных измерений ko22 и ko33 на модели могут быть смело перенесены на натуру, благодаря их независимости от колебаний восприимчивости материала и благодаря тому, что форма натуры и ее модели одинакова. Что касается продольной компоненты ko11, то, несмотря на точность модельных измерений, она нуждается в уточнении на натуре из-за ее зависимости от восприимчивости материала, которая, хотя и стабильна, может существенно (±20%) отличаться на модели и натуре даже в пределах одного сорта материала.
В заключение отметим, что определяемый по заявляемому способу так называемый "постоянный" магнитный момент тела нестабилен и нуждается в частом контроле, продольная (натурная) компонента восприимчивости kо11т нуждается в контроле значительно реже, а поперечная и вертикальная компоненты восприимчивости тела 5 определяются по заявляемому способу раз и навсегда и в последующем контроле не нуждаются. Однажды определенные на модели 3 поперечная и вертикальная компоненты восприимчивости сохраняют силу для всего класса родственных тел 5, и даже для нескольких классов, близких друг к другу по форме.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения магнитного момента тела удлиненной формы | 2020 |
|
RU2755026C1 |
| СПОСОБ ИЗМЕРЕНИЯ МАГНИТНОГО МОМЕНТА КРУПНОГАБАРИТНОГО ТЕЛА УДЛИНЕННОЙ ФОРМЫ | 2005 |
|
RU2303792C1 |
| МАГНИТНЫЙ СПОСОБ ПОИСКА ГРАНИЦ ИЗМЕНЕНИЯ ВЕЩЕСТВА В ОБЪЕКТЕ (СПОСОБ ЗЕМЦОВА) | 1998 |
|
RU2164356C2 |
| Способ измерения магнитного момента тела удлиненной формы | 2017 |
|
RU2677928C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОНЦЕНТРАЦИИ ФЕРРОМАГНИТНЫХ ЧАСТИЦ В ЖИДКОСТИ | 1998 |
|
RU2164019C2 |
| СПОСОБ ЗАЩИТЫ МЕТАЛЛИЧЕСКОГО ФЕРРОМАГНИТНОГО ОБЪЕКТА ОТ МАГНИТОМЕТРИЧЕСКОГО ОБНАРУЖЕНИЯ | 2017 |
|
RU2647482C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КРИВОЙ НАМАГНИЧИВАНИЯ ФЕРРОМАГНИТНОГО МАТЕРИАЛА | 2005 |
|
RU2293344C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ТЕПЛОПРОВОДНОСТИ ФЕРРОМАТЕРИАЛОВ | 2006 |
|
RU2324925C1 |
| Способ определения магнитных свойств материала ферромагнетика диагностикой образца этого материала | 2024 |
|
RU2827750C1 |
| КВАНТОВЫЙ СПОСОБ ИЗМЕРЕНИЯ НАПРЯЖЁННОСТИ, НАПРАВЛЕНИЯ, ГРАДИЕНТА МАГНИТНОГО ПОЛЯ ЗЕМЛИ И РЕАЛИЗУЮЩЕЕ ЕГО УСТРОЙСТВО | 2017 |
|
RU2680629C2 |
Предложенное изобретение относится к области измерения магнитных характеристик, в частности к измерению индуктивного и постоянного моментов крупногабаритного тела, например корабля. Задачей, на решение которой направлено данное изобретение, является упрощение процедуры измерения всех компонент (включая вертикальные) индуктивного и постоянного магнитных моментов крупногабаритного ферромагнитного тела, проводя соответствующие измерения без его поворотов (за исключением первого вспомогательного поворота для определения продольной восприимчивости тела). Предложенный способ заключается в повороте исследуемого тела в магнитном поле Земли из положения продольной осью на Север в противоположное положение и измерений соответствующих продольных компонент магнитных моментов тела MС1, МЮ1, при этом измеряют также продольные компоненты индукции магнитного поля Земли ВС1 и ВЮ1, а на магнитной модели тела уменьшенного масштаба 1/k заблаговременно определяют матрицу магнитной восприимчивости kо, объемы ферромагнитных частей модели νм и тела ν=k3νм, после чего расчетным путем находят продольную компоненту восприимчивости тела ko11т, затем вновь измеряют поле Земли В и определяют расчетным путем магнитный момент произвольно ориентированного тела М, который делят на индуктивный Ми и постоянный Мп магнитные моменты. 2 ил., 1 табл.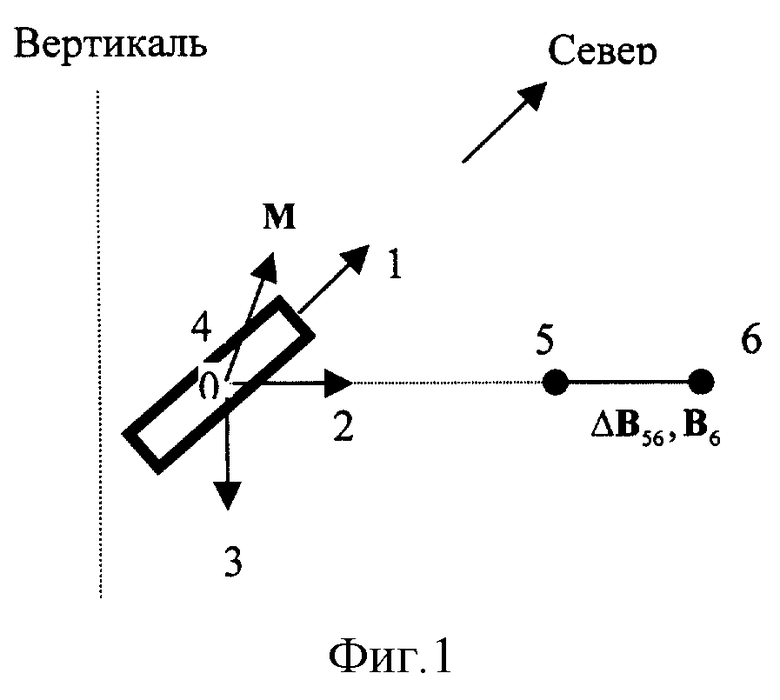
Способ раздельного измерения индуктивного и постоянного магнитных моментов крупногабаритного ферромагнитного тела удлиненной формы путем поворота его в магнитном поле Земли из положения продольной оси на Север в противоположное положение и измерений соответствующих продольных компонент магнитных моментов тела MС1, МЮ1, отличающийся тем, что измеряют также продольные компоненты индукции магнитного поля Земли ВС1 и ВЮ1, а на магнитной модели тела уменьшенного масштаба 1/k заблаговременно определяют матрицу магнитной восприимчивости k0, объемы ферромагнитных частей модели νм и тела ν=k3νм, после чего находят продольную компоненту восприимчивости тела k011т по формуле
k011т=μ0(MС1+MЮ1)/ν(BС1+BЮ1),
где μ0=4π×10-7 Гн/м - магнитная постоянная,
в дальнейшем вновь измеряют поле Земли В и магнитный момент произвольно ориентированного тела М, который делят на индуктивный Ми и постоянный Мп магнитные моменты по формулам
Мп=М-Ми,
где  диагональная матрица восприимчивости тела;
диагональная матрица восприимчивости тела;
k022, k033 - поперечная и вертикальная компоненты модельной восприимчивости k0.
| RU 2003110479 A1, 10.12.2004 | |||
| RU 2003110477 А1, 10.12.2004 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ МАГНИТНОГО МОМЕНТА СОЛНЕЧНЫХ БАТАРЕЙ КОСМИЧЕСКОГО АППАРАТА С СИСТЕМОЙ СИЛОВЫХ ГИРОСКОПОВ | 2000 |
|
RU2176972C1 |
| Способ раздельного измерения остаточной и индуктивной намагниченности образцов горных пород с помощью двух одинаковых магнитомодуляционных датчиков | 1958 |
|
SU123637A1 |
| Домовый номерной фонарь, служащий одновременно для указания названия улицы и номера дома и для освещения прилежащего участка улицы | 1917 |
|
SU93A1 |

