Изобретение относится к космической технике и может быть использовано в системах управления ориентацией космических аппаратов (КА), содержащих силовые гироскопы (СГ) для определения магнитного момента солнечных батарей (СБ) КА.
Известны различные наземные способы определения магнитного момента КА [1, стр. 51-60].
Один из способов состоит в измерении механического момента, действующего на КА, в известном магнитном поле. Для этого КА подвешивается на торсионе и ведется наблюдение за его угловым отклонением за счет взаимодействия полного вектора возмущающего магнитного момента с магнитным полем. Данный способ имеет существенные недостатки: требует подвески сравнительно тяжелого объекта измерений, т.е. КА, на торсионе, причем диаметр торсиона для увеличения точности измерений должен быть как можно меньше, а длина как можно больше. Это влечет за собой необходимость уменьшения нагрузки на торсион и применения, например, специальных жидкостных подшипников, на которые должен устанавливаться КА. Кроме того, возникает проблема точной статической балансировки КА, т.к. даже незначительный дисбаланс очень сильно влияет на точность измерений. Большие ошибки могут возникнуть также от конвекции воздушных потоков, которые могут действовать на КА при испытаниях.
Другой способ определения магнитного момента КА заключается в измерении наведенной электродвижущей силы (ЭДС) в катушке. В данном случае используется явление электромагнитной индукции, которая возникает в результате движения КА относительно некоторой измерительной (специальной) обмотки. Этот способ позволяет быстро и просто определить магнитный момент КА с достаточно высокой точностью (порядка 0.05 Ам2). Одним из существенных недостатков этого метода является то, что подвес КА, вращающегося со скоростью порядка 1 об/с, требует мощных поддерживающих устройств, а следовательно, может применяться лишь при испытаниях малых КА.
Еще один из известных способов определения магнитного момента КА состоит в измерении магнитного поля КА и вычислении магнитного момента по данным измерений. В принципе он не требует компенсации внешнего поля в месте установки КА. Этот метод пригоден только в том случае, когда можно пренебречь составляющей магнитного момента от магнитомягких включений КА. Если же этого сделать нельзя, то измерения по методу магнитной съемки поля КА следует проводить в установках, которые способны создавать однородные поля в объеме, занимаемом КА, и компенсировать в нем магнитное поле Земли.
Таким образом, недостатком всех перечисленных ранее способов определения магнитного момента КА является необходимость использования специальных установок, обеспечивающих однородные магнитные поля в объеме, занимаемом КА, с возможностью компенсации в этом объеме магнитного поля Земли. Кроме того, рассмотренные способы решают задачу по определению магнитного момента КА и его элементов, содержащих токовые контуры, в полете. В то же время известно, что указанные магнитные моменты в процессе полета КА могут изменяться по величине. Например, на СБ базового блока орбитального комплекса "Мир" наблюдались повреждения токовых контуров солнечных батарей, вызванные столкновениями с микрометеоритами. При этом некоторые из этих токовых контуров перестали функционировать. Очевидно, что первоначальная магнитная уравновешенность СБ в этом случае нарушается и как следствие меняется величина магнитного момента СБ.
Известен способ определения и использования магнитного момента, компенсирующего влияние возмущающих факторов, действующих на КА в полете [2]. При реализации данного способа, выбранного в качестве прототипа, строится и впоследствии поддерживается на заданном интервале времени за счет закрутки такая ориентация КА, при которой его ось вращения располагается перпендикулярно плоскости круговой орбиты. Поддержание указанной ориентации осуществляется за счет приложения от СБ к КА соответствующего по величине и направлению управляющего магнитного момента, являющегося результатом взаимодействия собственного магнитного момента СБ и магнитного поля Земли. При этом приложение магнитного момента осуществляется в случае выхода текущего значения измеренной угловой скорости КА из допустимого диапазона.
Недостатком такого способа определения магнитного момента СБ является его ограниченность, т.к. он применим только для КА, движущихся по круговой орбите с наклонением 0...3o, ориентированных осью вращения перпендикулярно плоскости орбиты.
Известно [3] , что набор возможных режимов ориентации КА гораздо шире, чем тот, который рассмотрен в прототипе. При этом очень важно знать, какие внешние возмущающие моменты действуют на КА в процессе выполнения заданной ориентации. В случае расчетной или нерасчетной магнитной неуравновешенности СБ внешние моменты могут быть определяющими для расчета изменений вектора кинетического момента в системе СГ, расхода рабочего тела в реактивных двигательных установках (например, для разгрузки СГ от накопленного кинетического момента), определения силового воздействия на приводы поворотных СБ, непосредственно возможного воздействия магнитных моментов СБ на установленную на борту КА аппаратуру и т.д. Поэтому очень важно иметь более универсальный способ определения магнитного момента СБ с точки зрения возможных ориентаций КА, в том числе нерасчетного проявления магнитного момента в СБ, например, при выходе из строя в магнитоуравновешенной СБ некоторых токовых контуров.
Задачей предлагаемого способа является определение магнитного момента СБ КА с системой силовых гироскопов для любых случаев состояния магнитного момента СБ и более широкого числа режимов ориентации КА.
Для этого в способе определения магнитного момента СБ КА с системой СГ, включающем определение, построение и поддержание ориентации КА, измерение вектора угловой скорости КА, определение момента от взаимодействия магнитного поля Земли с собственным магнитным моментом солнечных батарей, а также определение перед началом первого из интервалов измерений, по крайней мере один из которых находится на освещенной Солнцем части орбиты, ориентации с учетом конфигурации космического аппарата, при которой значение магнитного момента солнечных батарей равно нулю, строят и поддерживают эту ориентацию и измеряют кинетический момент силовых гироскопов на всех интервалах измерений, по измеренным значениям кинетического момента силовых гироскопов и угловой скорости космического аппарата рассчитывают значения суммарного кинетического момента КА, по рассчитанному значению суммарного кинетического момента космического аппарата определяют значение главного момента внешних сил на всех интервалах измерений, перед каждым последующим интервалом измерений в построенной ориентации космического аппарата определяют конфигурацию КА, при которой значение магнитного момента солнечных батарей максимально, а остальные составляющие главного момента внешних сил близки к определенным при прохождении первого интервала измерений, в построенной ориентации изменяют конфигурацию космического аппарата на определенную ранее при прохождении КА по освещенной Солнцем части орбиты, по результатам изменения главного вектора момента внешних сил, рассчитанным при прохождении первого интервала измерений и текущего интервала измерений, а также значениям магнитного поля Земли определяют значение магнитного момента солнечных батарей космического аппарата.
Сущность изобретения состоит в следующем. Для начала выбираются два прохода КА одного и того же солнечного участка орбиты. При этом могут использоваться, например, два одинаковых, рядом летящих КА, находящихся в плоскости одной орбиты. Такой случай можно рассматривать для полета двух геостационарных спутников типа "Ямал-100". Высокая точность удержания их в точке "стояния" (±800 м от расчетной точки стояния по долготе и наклонению) позволяет для резервирования ресурса бортовых ретрансляторов управлять двумя спутниками одновременно.
Указанные спутники содержат в качестве исполнительных органов системы ориентации комплект маховиков (одностепенных СГ).
Для решения задачи могут быть выбраны также два минимально разнесенных по времени участка орбиты одного КА.
В дальнейшем будем условно называть случай двух прохождений одного участка орбиты двумя интервалами измерений.
Тогда задача на двух интервалах измерений первоначально будет сводиться к тому, чтобы из всех возмущающих моментов, представленных главным вектором суммарного момента внешних сил, выделить магнитный момент, действующий на КА со стороны СБ.
Для этого на одном из интервалов измерений добиваемся равенства магнитного момента нулю, а на другом стремимся получить максимальное по абсолютной величине значение этого момента (это в большинстве случаев соответствует работе солнечных батарей в штатном режиме эксплуатации на освещенной Солнцем части орбиты). Получить нулевое значение рассматриваемого магнитного момента можно в том случае, если не допустить освещения Солнцем активной поверхности СБ. В качестве примера рассмотрен один из вариантов, представленный на чертеже. Обозначения на чертеже имеют следующее значение: β - угол между нормалью  активной поверхности СБ и вектором СБ-Солнце
активной поверхности СБ и вектором СБ-Солнце  .
.
Не допустить освещения Солнцем активной поверхности СБ можно следующим образом: назначить один из интервалов измерения при нахождении КА в тени или развернуть СБ так, чтобы угол (β) между нормалью к активной поверхности СБ  и вектором СБ-Солнце
и вектором СБ-Солнце  составил величину не менее 90 o и не более 270 o (см. чертеж). На всех интервалах измерения желательно не менять конфигурацию космического аппарата, т. к. величина и направление действия на КА моментов внешних сил зависит не только от ориентации КА, но и от его конфигурации. По этим же причинам необходимо максимально сблизить во времени и пространстве интервалы измерений. Для низкоорбитальных КА предпочтительным является метод обнуления магнитного момента путем разворота СБ на указанный ранее угол, а не использование теневого участка орбиты. Это обусловлено тем, что плотность атмосферы на теневом участке в несколько раз меньше, чем на освещенном Солнцем, а следовательно, и величина аэродинамического момента, действующего на КА, будет различной на этих участках, что является нежелательным. В то же время для высокоорбитальных КА, например геостационарных, выбор способа обнуления магнитного момента не имеет существенного значения, т.к. влияние на эти космические аппараты атмосферы пренебрежительно мало. Для того чтобы обеспечить максимальную близость значений возмущающих моментов на всех интервалах измерений с магнитным моментом, отличным от нуля, необходимо, прежде всего, создать условия, при которых изменение магнитного момента на рассматриваемых интервалах измерений будет пренебрежимо мало. Для низкоорбитальных аппаратов этого можно добиться уменьшением продолжительности интервала измерений и выбором этого интервала на тех участках орбиты, на которых магнитное поле Земли меняется несущественно, например у экватора. Для высокоорбитальных аппаратов, например геостационарных спутников связи, находящихся с высокой точностью в точке "стояния", эта задача решается проще, т.к. без серьезных допущений можно считать магнитное поле Земли в этой точке на интервалах измерений неизменным.
составил величину не менее 90 o и не более 270 o (см. чертеж). На всех интервалах измерения желательно не менять конфигурацию космического аппарата, т. к. величина и направление действия на КА моментов внешних сил зависит не только от ориентации КА, но и от его конфигурации. По этим же причинам необходимо максимально сблизить во времени и пространстве интервалы измерений. Для низкоорбитальных КА предпочтительным является метод обнуления магнитного момента путем разворота СБ на указанный ранее угол, а не использование теневого участка орбиты. Это обусловлено тем, что плотность атмосферы на теневом участке в несколько раз меньше, чем на освещенном Солнцем, а следовательно, и величина аэродинамического момента, действующего на КА, будет различной на этих участках, что является нежелательным. В то же время для высокоорбитальных КА, например геостационарных, выбор способа обнуления магнитного момента не имеет существенного значения, т.к. влияние на эти космические аппараты атмосферы пренебрежительно мало. Для того чтобы обеспечить максимальную близость значений возмущающих моментов на всех интервалах измерений с магнитным моментом, отличным от нуля, необходимо, прежде всего, создать условия, при которых изменение магнитного момента на рассматриваемых интервалах измерений будет пренебрежимо мало. Для низкоорбитальных аппаратов этого можно добиться уменьшением продолжительности интервала измерений и выбором этого интервала на тех участках орбиты, на которых магнитное поле Земли меняется несущественно, например у экватора. Для высокоорбитальных аппаратов, например геостационарных спутников связи, находящихся с высокой точностью в точке "стояния", эта задача решается проще, т.к. без серьезных допущений можно считать магнитное поле Земли в этой точке на интервалах измерений неизменным.
Математическая модель движения КА относительно центра масс на интервале измерения с нулевым магнитным моментом СБ, назовем его условно первым, запишется в следующем виде в векторно-матричной форме в связанной с КА системе координат:
здесь  - суммарный вектор кинетического момента КА;
- суммарный вектор кинетического момента КА;  - вектор кинетического момента СГ;
- вектор кинетического момента СГ;  - вектор угловой скорости КА;
- вектор угловой скорости КА;  - моменты внешних сил, вызванные влиянием на КА гравитационных полей Земли, Солнца и Луны соответственно на первом интервале измерений;
- моменты внешних сил, вызванные влиянием на КА гравитационных полей Земли, Солнца и Луны соответственно на первом интервале измерений;  - вектор момента от солнечного ветра;
- вектор момента от солнечного ветра;  - тензор инерции КА;
- тензор инерции КА;  - главный вектор суммарного момента внешних сил, действующих на КА на первом интервале измерений.
- главный вектор суммарного момента внешних сил, действующих на КА на первом интервале измерений.
Общее решение системы уравнений (1) будем искать в следующем виде:
где j - номер текущего шага интегрирования;
Δt - шаг интегрирования по времени;
1, 2, 3 - проекции векторов на оси, связанной с КА системы координат.
На рассматриваемом интервале измерения из первых двух уравнений (1) по измерениям вектора угловой скорости КА и кинетического момента СГ определяется суммарный вектор момента внешних сил. И затем из (2) текущие значения суммарного момента внешних сил на каждом шаге интегрирования:
На других интервалах измерений, когда магнитный момент СБ отличен от нуля (желательно максимален), уравнения движения имеют вид аналогичный (1), но в данном случае значение момента внешних сил, действующих на КА, включает в себя кроме указанных выше моментов и магнитный момент, действующий на КА при взаимодействии магнитного поля Земли и собственного магнитного момента СБ КА.
здесь  - суммарный вектор кинетического момент КА на k-м интервале измерений;
- суммарный вектор кинетического момент КА на k-м интервале измерений;  - вектор кинетического момента гиродинов;
- вектор кинетического момента гиродинов;  - вектор угловой скорости КА;
- вектор угловой скорости КА;  - моменты внешних сил, вызванные влиянием на КА гравитационных полей Земли, Солнца и Луны и соответственно на k-м интервале измерений;
- моменты внешних сил, вызванные влиянием на КА гравитационных полей Земли, Солнца и Луны и соответственно на k-м интервале измерений;  - вектор момента от солнечного ветра;
- вектор момента от солнечного ветра;  - магнитный момент, обусловленный взаимодействием магнитного поля Земли и собственного магнитного момента СБ КА;
- магнитный момент, обусловленный взаимодействием магнитного поля Земли и собственного магнитного момента СБ КА;  - тензор инерции КА;
- тензор инерции КА;  - собственный магнитный момент КА;
- собственный магнитный момент КА;  - магнитное поле Земли;
- магнитное поле Земли;  - вектор суммарного момента внешних сил, действующих на КА на k-м интервале измерений.
- вектор суммарного момента внешних сил, действующих на КА на k-м интервале измерений.
По аналогии с (3) получим значения суммарного момента внешних сил на рассматриваемом интервале измерений.
Дальнейшее решение задачи возможно различными путями, отличающимися способом определения вектора суммарного момента внешних сил. Одним из них, наиболее простых, является расчет на каждом k-м интервале измерений вектора среднего значения суммарного момента внешних сил:
здесь  - вектор среднего момента внешних сил на k-м интервале измерений, j - число измерений на всех интервалах (раздельно рассматриваются интервалы с нулевым и отличным от нуля значением магнитного момента СБ).
- вектор среднего момента внешних сил на k-м интервале измерений, j - число измерений на всех интервалах (раздельно рассматриваются интервалы с нулевым и отличным от нуля значением магнитного момента СБ).
Другим способом определения вектора суммарного момента внешних сил является отдельное решение уравнений для интервала с нулевым (2) и аналогичных уравнений для интервалов с отличным от нуля значением магнитного момента СБ любым статистическим методом, например методом наименьших квадратов относительно суммарного момента внешних сил.
Учитывая то, что значения моментов на всех участках измерений близки по разности суммарного момента внешних сил на интервалах с нулевым значением магнитного момента и интервалах измерений с отличным от нуля магнитным моментом, определяется магнитный момент, действующий на КА:
Затем, используя последнее выражение из (6) для магнитного момента СБ и известные значения магнитного поля Земли на интервалах измерения проходящих по освещенной Солнцем части орбиты, можно найти значение собственного магнитного момента СБ.
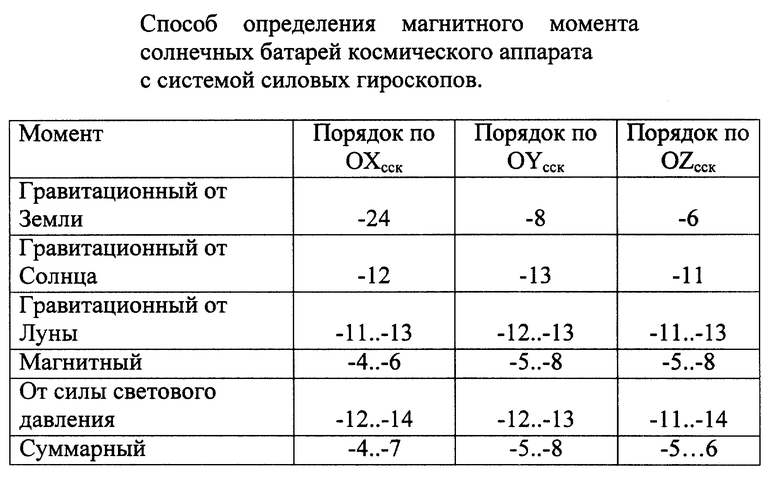
Нужно отметить ряд особенностей, имеющих место при выборе интервалов измерений. В зависимости от высоты орбиты КА влияние на него различных возмущающих моментов может существенно отличаться. Так, на низкоорбитальные космические аппараты преобладающее влияние оказывает гравитационный момент от Земли. Этот момент может на порядок превосходить другие моменты. К примеру, для орбитальной станции "Мир" в зависимости от ее ориентации, текущего радиуса-вектора и конфигурации величина гравитационного момента от Земли составляет 5...6 Нмс, а аэродинамического момента - 0,8...1,2 Нмс. Величина остальных моментов, влияющих на ориентацию станции, существенно меньше. При решении данной задачи ими можно пренебречь без существенных потерь точности конечного результата и, учитывая неизменность ориентации КА при проведении измерений, считать гравитационный момент от влияния Земли неизменным (при поддержании ориентации в орбитальной системе координат). В случае геостационарной орбиты влияние на КА аэродинамического момента пренебрежимо мало и может не рассматриваться вовсе. Далее в таблице показан порядок величин моментов внешних сил, действующих на спутник при его движении по геостационарной орбите в штатной ориентации, полученный рассчетным путем. В таблице OXсск, OYсск, OZсск - оси связанной со спутником строительной системы координат OXсскOYсскOZсск. Для понимания данных из таблицы сделаем некоторые пояснения. Константа гравитационного момента от Земли объясняется малым изменением точки "стояния" спутника по отношению к Земле, неизменностью его ориентации и медленным изменением тензора инерции. Константа порядка гравитационного момента от Солнца объясняется прежде всего малым изменением расстояния до Солнца за виток. Гравитационные моменты от Солнца и Луны, а также момент от силы светового давления имеют один порядок и на разных участках орбиты могут либо суммироваться, либо компенсировать друг друга. Основное влияние на движение спутника относительно центра масс оказывает гравитационный момент от Земли и магнитный момент, обусловленный влиянием собственного магнитного момента спутника (прежде всего его солнечных батарей) и магнитного поля Земли. При этом, как видно из таблицы, в штатной ориентации магнитный момент по Xсск существенно превышает гравитационный, по Yсск превышает или совпадает по порядку, а по Zсск либо соответствует гравитационному, либо меньше его на 2 порядка в зависимости от положения солнечных батарей. Естественно, что полный момент внешних сил, действующих на спутник, определяется в основном этими моментами - гравитационным от Земли и магнитным. На первом этапе для уточнения собственного магнитного момента спутника, исходя из выше сказанного, можно учитывать только действие на него гравитационного момента от Земли и магнитный момент.
Порядок величин моментов внешних сил, действующих на КА, имеет важное значение для определения необходимой степени близости значений моментов внешних сил на различных интервалах. Степень близости значений моментов внешних сил на интервалах измерений, имеющая решающее значение для точности определения магнитного момента СБ, определяется внешними условиями, в которых проходит полет, и возможностями обеспечения точности построения и поддержания ориентации, которыми располагает КА. К внешним условиям относятся, прежде всего, ориентация и конфигурация КА, положение КА относительно центров возмущений (Земля, Луна, Солнце). Чем более схожи внешние условия полета на различных интервалах измерений, тем точнее конечный результат. Понятно, что близость значений моментов внешних сил определяется величиной самих моментов и должна быть как минимум на порядок выше, чем значения учитываемых при моделировании моментов. Нужно отметить, что во многих случаях порядки различных моментов, действующих на КА, могут существенно отличаться. В этих случаях представляется разумным не учитывать моменты, порядок которых много меньше порядка магнитного момента СБ. Более подробно об этом будет сказано далее.
При более строгой постановке задачи требуется учет всех возмущающих факторов, порядок которых соответствует порядку магнитного момента. Для того чтобы величины различных моментов внешних сил, кроме магнитного, были близки на различных интервалах измерений, необходимо обеспечить условия, при которых положение источников возмущений остается неизменным по отношению к КА. Идеальным является случай, когда КА на всех интервалах измерений движется в заданной ориентации по одной и той же траектории. В этом случае положение КА по отношению к Земле остается неизменным, а следовательно, гравитационный момент от Земли также неизменен на всех интервалах. Но в силу естественных причин такая идеальная ситуация невозможна, а потому нужно искать приближенное решение данной ситуации в каждом конкретном случае. Так, например, движение геостационарного спутника связи в штатном режиме можно с достаточной точностью считать происходящим по одной траектории, а учитывая период обращения Земли вокруг Солнца, отношение размеров Земли и Солнца, расстояние между ними и порядок возмущающих влияний, приведенный ранее в таблице, можно рассматривать возмущения от Солнца постоянными и неизменными на интервалах измерений. По тем же причинам, если интервалы измерений не разнесены по времени и не имеют большой продолжительности, т.к. период обращения Луны вокруг Земли значительно меньше периода обращения Земли вокруг Солнца (≈27.3 ч), можно считать гравитационный момент от Луны на всех интервалах измерений постоянным и неизменным. Т.о., исходя из вышесказанного, можно смоделировать ситуацию, в которой моменты внешних сил можно считать постоянными и неизменными на всех интервалах измерений. Необходимость максимального сближения интервалов измерений обусловлена еще и тем, что в процессе функционирования КА могут меняться его инерционные параметры, а следовательно, и значения гравитационных моментов.
Один из возможных вариантов реализации предлагаемого способа определения магнитного момента солнечных батарей имеет следующий вид. На этапе планирования полета космического аппарата, исходя из программы и текущих условий полета (наличие тени, необходимая ориентация и конфигурация КА, возможность использования вычислительных и телеметрических ресурсов и т.д.), определяются интервалы измерений. Для конкретизации будем считать, что определены два интервала измерений (как указывалось ранее, таких интервалов может быть и больше). Предположим, что на первом интервале измерений ставится задача получения измерительной информации при нулевом магнитном моменте СБ. С этой целью определяется необходимая ориентация и конфигурация КА (ориентация СБ относительно Солнца). При этом желательно минимизировать изменения в программе полета КА, не связанные с выполнением аппаратом своих непосредственных задач. Так, по возможности необходимо использовать ту ориентацию КА, при которой аппарат может продолжать решение поставленных перед ним задач. Менять конфигурацию аппарата (положение СБ для проведения измерений) нужно только, если это не повлияет существенно на энергоприход КА (например, при движении КА в тени), либо когда есть возможность компенсировать потери энергии за счет других ресурсов (например, с помощью аккумуляторных батарей). Возможно, лучше использовать несколько коротких по времени интервалов измерений вместо одного длинного.
К началу первого интервала измерений должна быть построена требуемая для проведения измерений ориентация КА с соответствующим положением СБ (например, развернуть СБ так, чтобы угол между нормалью к активной поверхности СБ и вектором СБ-Солнце составил величину не менее 90o и не более 270o). С начала интервала измерений в определенные моменты времени от датчиков угловой скорости (ДУС) получаются значения абсолютной угловой скорости КА и от соответствующих приборов значения собственного кинетического момента гиродинов КА. Используя эти значения, а также тензор инерции КА, в БЦВМ, или после их передачи в ЦУП, рассчитываются значения суммарного кинетического момента КА на первом интервале измерений (второе выражение из (1)). Далее по (2) вычисляется значение суммарного момента внешних сил, действующего на аппарат, к примеру, методом наименьших квадратов. Полученное значение запоминается для дальнейшего использования.
Перед достижением второго интервала измерений, который обязательно должен находиться на освещенной Солнцем части орбиты, строится такая конфигурация КА (ориентацию по указанным выше причинам менять нежелательно), при которой магнитный момент СБ будет отличен от нуля, а в идеальном случае - максимален. Это, как правило, совпадает с режимом штатной эксплуатации КА. Далее, по аналогии с первым интервалом измерений, с начала второго интервала измерений в определенные моменты времени от датчиков угловой скорости получаются значения абсолютной угловой скорости КА и от соответствующих приборов значения собственного кинетического момента гиродинов КА. В случае наличия на борту КА магнитометров в те же моменты времени от них можно получить значения магнитного поля Земли. Если же таковые на борту отсутствуют, то значения магнитного поля Земли с достаточно высокой точностью можно получить расчетным путем по существующим математическим моделям. Используя значения угловой скорости, а также тензор инерции КА, в БЦВМ, или после их передачи в ЦУП, рассчитываются значения суммарного кинетического момента КА на втором интервале измерений (второе выражение из (1)). Далее по (2) вычисляется значение суммарного момента внешних сил, действующего на аппарат, к примеру, методом наименьших квадратов. Полученное значение запоминается для дальнейшего использования.
Заключительный этап способа определения магнитного момента СБ состоит в использовании полученного по результатам измерений и расчетов на первом и втором интервалах измерений суммарных моментов внешних сил, действовавших на КА, для расчета магнитного момента и собственного магнитного момента СБ по (6).
Приведем пример расчета магнитного момента СБ для геостационарного спутника связи "Ямал".
Для проведения эксперимента построена следующая ориентация КА в орбитальной системе координат (ОСК), задаваемая углами Крылова:
λY= 0;λX = 0;λZ = 270°;
Для задания необходимой конфигурации СБ КА поворачиваются так, что орт нормали к активной поверхности СБ  занял следующее положение в ССК
занял следующее положение в ССК 
КА стабилизирован в ОСК. Вектор его угловой скорости (в связанной со спутником системе координат (ССК)): .
.
Все величины в дальнейшем представлены в ССК, за исключением случаев, оговоренных отдельно. В начальный момент времени вектор состояния КА в гринвичской системе координат следующий:

где  - радиус-вектор и вектор скорости КА соответственно. Тензор инерции КА "Ямал":
- радиус-вектор и вектор скорости КА соответственно. Тензор инерции КА "Ямал":
Используя значения угловой скорости на 1-м интервале измерений при нулевом магнитном моменте СБ и тензор инерции КА по второму выражению из (1), рассчитывается вектор суммарного кинетического момента КА на первом интервале измерений: .
.
Затем по (2) методом наименьших квадратов определяется вектор суммарного момента внешних сил. На текущем интервале измерений этот вектор имеет следующее значение:
Аналогичные расчеты выполняются для второго интервала измерений с отличным от нуля магнитным моментом СБ:
Затем по первому выражению из (6) определяется разность между суммарным моментом внешних сил на первом и втором интервалах измерений.
 .
.

Полученный вектор является вектором магнитного момента СБ в ССК.
Следующим шагом является определение собственного магнитного момента СБ. Расчетное значение вектора магнитной индукции Земли в точке "стояния" КА
и зная положение СБ в ССК, из выражения для скалярного произведения векторов ,
,
находим косинус угла между векторами  :
:
Далее, используя выражение для модуля векторного произведения векторов 
 .
.
рассчитываем модуль собственного магнитного момента СБ: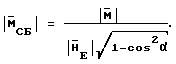
Зная положение СБ и ССК, получим значение вектора собственного магнитного момента СБ в этой системе координат: .
.
Решение задачи определения магнитного момента СБ предлагаемым способом завершено.
По сравнению с прототипом применение данного технического решения позволяет определить магнитный момент СБ вне зависимости от ориентации и конфигурации КА, что в совокупности с расчетом других моментов внешних сил, действующих на КА, дает возможность осуществлять прогноз изменения суммарного вектора кинетического момента космического аппарата, а следовательно, более эффективно управлять ориентацией КА.
Источники информации:
1. Коваленко А.П. Магнитные системы управления космическими летательными аппаратами. - М.: Машиностроение, 1975 г.
2. Заявка 96101440/28 24/01/96.
3. Раушенбах Б.В., Токарь Е.Н. Управление ориентацией КА. - М.: Наука, 1974 г.
Использование: в системах управления ориентацией космических аппаратов. Перед началом первого из интервалов измерений определяют ориентацию с учетом конфигурации космического аппарата, при которой значение магнитного момента солнечных батарей равно нулю. Строят и поддерживают эту ориентацию и измеряют кинетический момент силовых гироскопов на всех интервалах измерений. По измеренным значениям кинетического момента и угловой скорости рассчитывают значения суммарного кинетического момента космического аппарата. Определяют значение главного момента внешних сил на всех интервалах измерений. По результатам изменения главного вектора момента внешних сил и значениям магнитного поля Земли определяют значение магнитного момента солнечных батарей. Способ позволяет определять магнитный момент для любых случаев состояния солнечных батарей и различных режимов ориентации космического аппарата. 1 ил., 1 табл.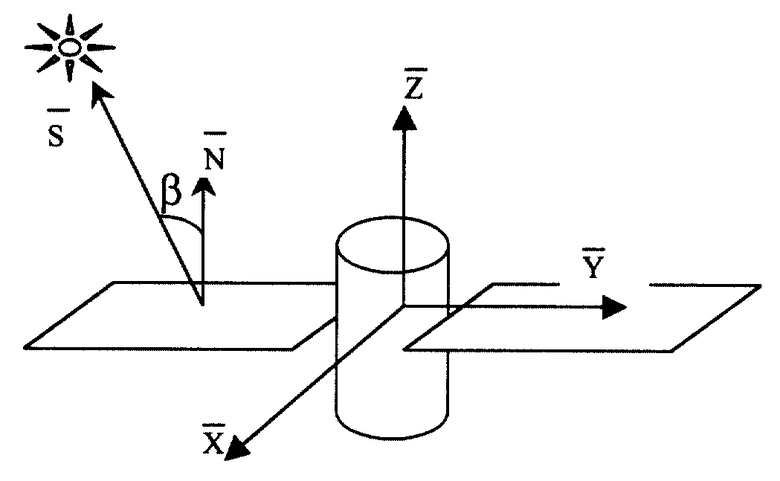
Способ определения магнитного момента солнечных батарей космического аппарата с системой силовых гироскопов, включающий определение, построение и поддержание ориентации космического аппарата (КА), измерение вектора угловой скорости КА, определение момента от взаимодействия магнитного поля Земли с собственным магнитным моментом солнечных батарей, отличающийся тем, что определяют перед началом первого из интервалов измерений, по крайней мере один из которых находится на освещенной Солнцем части орбиты, ориентацию с учетом конфигурации космического аппарата, при которой значение магнитного момента солнечных батарей равно нулю, строят и поддерживают эту ориентацию и измеряют кинетический момент силовых гироскопов на всех интервалах измерений, по измеренным значениям кинетического момента силовых гироскопов и угловой скорости космического аппарата рассчитывают значения суммарного кинетического момента КА, по рассчитанному значению суммарного кинетического момента космического аппарата определяют значение главного момента внешних сил на всех интервалах измерений, перед каждым последующим интервалом измерений в построенной ориентации космического аппарата определяют конфигурацию КА, при которой значение магнитного момента солнечных батарей максимально, а остальные составляющие главного момента внешних сил близки к определенным при прохождении первого интервала измерений, в построенной ориентации изменяют конфигурацию космического аппарата на определенную ранее при прохождении КА по освещенной Солнцем части орбиты, по результатам изменения главного вектора момента внешних сил, рассчитанным при прохождении первого интервала измерений и текущего интервала измерений, а также значениям магнитного поля Земли определяют значение магнитного момента солнечных батарей космического аппарата.
| КОСМИЧЕСКИЙ АППАРАТ СО СТАБИЛИЗАЦИЕЙ ВРАЩЕНИЕМ | 1996 |
|
RU2130409C1 |
| СПОСОБ ФОРМИРОВАНИЯ РАЗГРУЗОЧНОГО МОМЕНТА ДЛЯ СИСТЕМЫ СИЛОВЫХ ГИРОСКОПОВ КОСМИЧЕСКОГО АППАРАТА С СОЛНЕЧНЫМИ БАТАРЕЯМИ | 1992 |
|
RU2030338C1 |
| СПУТНИК С ТРЕХОСНОЙ СТАБИЛИЗАЦИЕЙ УГЛОВОГО ПОЛОЖЕНИЯ (ВАРИАНТЫ) И СПОСОБ УПРАВЛЕНИЯ ЭТИМ СПУТНИКОМ | 1991 |
|
RU2114770C1 |

