Изобретение относится к области измерения магнитного момента (ММ), в частности крупногабаритного намагниченного тела удлиненной формы (например, корабля). Разумеется, речь идет о косвенном измерении ММ тела.
Известен двухточечный магнитометрический метод измерения ММ [1. Семенов В.Г. и Сонина В.Э. Анализ методов измерения магнитных моментов // Метрология 1992 №8 С. 3-46]. Предполагалось, что метод [1] может применяться для измерения ММ крупногабаритных тел в дальней зоне (более полудлины тела), благодаря своей простоте и оперативности. Однако для тела удлиненной формы результирующая погрешность измерения этим методом достаточно велика (20-30%), причем в погрешности преобладает методическая составляющая или погрешность от недипольности (10-16%).
Известен также [2. Способ измерения магнитного момента крупногабаритного тела удлиненной формы. Патент РФ №2303792]. Способ [2] основан на измерениях магнитной индукции (МИ) в нескольких десятках точек ближней зоны (менее полудлины тела). В дальней зоне точность способа [2] ухудшается.
Недавно метод [1] был переработан и несколько улучшен [3. Иванов Ю.М., Гетъман Р.В., Матисов В.Я., Семенов В.Г. Анализ погрешностей измерения магнитного момента кораблей в дальнем поле. Тезисы доклада на Межведомственной научно-практической конференции «Актуальные проблемы военной науки». Военно-Морской Политехнический институт и Военно-Морская Академия им. Адмирала Флота Советского Союза Н.Г. Кузнецова. 12.10.2017 г., г. Санкт-Петербург]. Метод [3] основан наряде инновационных технологий магнитометрии, среди них [4. Ю.М. Иванов, В.Г. Семенов. Корректирующие матрицы - путь к повышению точности трехкомпонентных магнитометров // Измерительная техника №6, 2013 г. С. 46-51] и [5. Ю.М. Иванов, В.Г. Семенов, К.В. Осипенко. Угловое согласование трехкомпонентных дифференциальных магнитометров // Научное обозрение. Технические науки, 2017, №2 С. 42-46].
В методе [3] приняты меры по снижению всех составляющих погрешности измерения ММ, кроме методической составляющей или погрешности от недипольности. Результирующая погрешность для [3] оценивается на уровне 7-10%.
Метод [3] принят в качестве ближайшего аналога заявляемого способа по совокупности существенных признаков.
Известный метод измерения ММ тела удлиненной формы включает измерения разности МИ тела в дальней зоне трехкомпонентными измерительным и компенсационным магнитометрами, а также измерения расстояний между датчиками этих магнитометров и телом.
Причиной, препятствующей достижению указанного ниже технического результата при использовании известного способа является наличие неуправляемой в [3] методической составляющей погрешности или погрешности от недипольности тела.
Задачей, на решение которой направлено заявляемое изобретение, является повышение точности измерения ММ тела удлиненной формы за счет снижения погрешности от недипольности тела.
Технический результат, получаемый при осуществлении изобретения, заключается в обеспечении возможности работы измерительного и компенсационного магнитометров (или дифференциального магнитометра) на более высоких диапазонах МИ при измерении ММ в дальней зоне.
Указанный технический результат достигается тем, что заявляемый способ измерения магнитного момента тела удлиненной формы, включающий измерения разности магнитной индукции в дальней зоне тела трехкомпонентными измерительным и компенсационным магнитометрами и расстояний между датчиками магнитометров и телом, отличается тем, что тело делят на продольные участки одинакового объема, измеряют расстояния между центрами участков и датчиков, затем измеряют магнитный момент по формуле

где М - измеряемый магнитный момент, Ам2;
μ0=4π×10-7 Гн/м - магнитная постоянная;
p - число участков разделения тела; i=1,2…p - индекс каждого участка;
 - градиент градиента
- градиент градиента 
RИДi - расстояние между центрами измерительного датчика и i-того участка, м;
RКДi - расстояние между центрами компенсационного датчика и i-того участка, м;
-1 - символ обратной матрицы содержимого внешних скобок правой части формулы;
ΔВИК - разность показаний измерительного и компенсационного магнитометров, Тл.
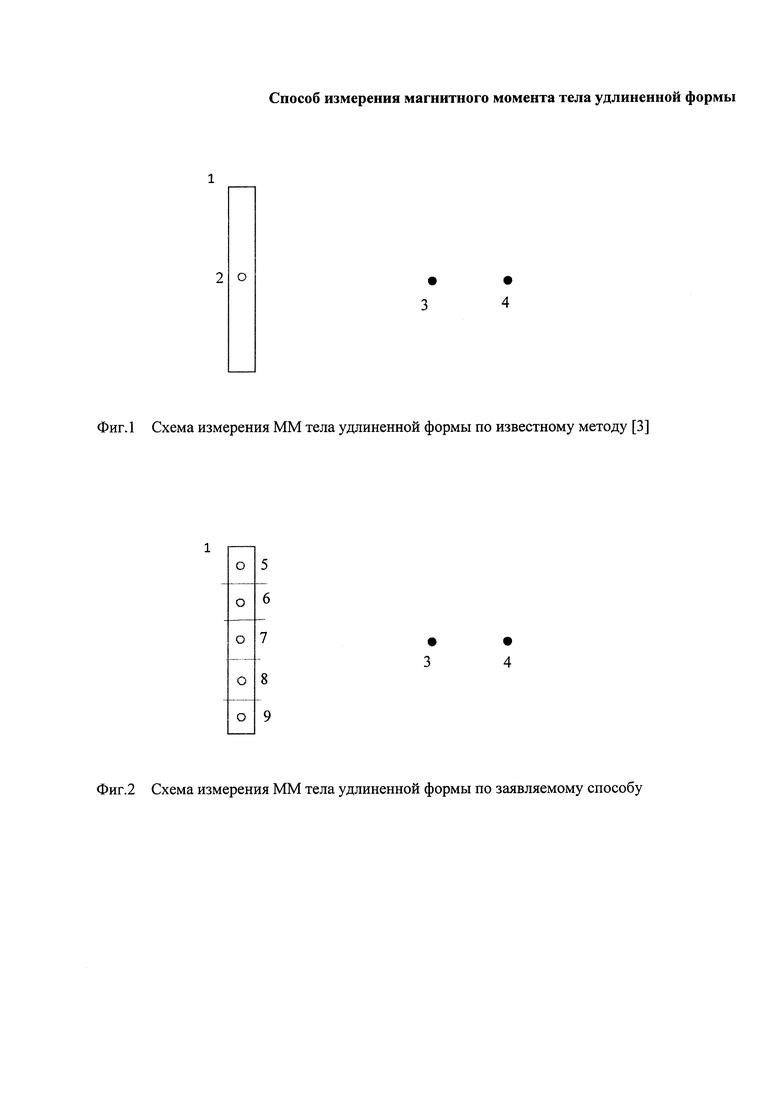
На фиг. 1 изображена схема измерения ММ тела удлиненной формы по известному способу [3], где 1 - тело удлиненной формы; 2 - центр тела 1; 3 - измерительный датчик (ИД); 4 - компенсационный датчик (КД) трехкомпонентного дифференциального магнитометра.
На фиг. 2 изображена схема измерения ММ тела удлиненной формы по заявляемому способу, где 1 - тело удлиненной формы; 3 - измерительный датчик (ИД); 4 - компенсационный датчик (КД) трехкомпонентного дифференциального магнитометра; 5, 6, 7, 8, 9 - центры участков, на которые разбито тело 1.
Известный метод (фиг. 1) действует по следующему уравнению измерения

где М - измеряемый ММ, Ам2;
ΔМнд(1) - погрешность уравнения измерения (1), или методическая погрешность, или погрешность от недипольности тела, Ам2;
μ0=4π×10-7 Гн/м - магнитная постоянная;
 - градиент градиента
- градиент градиента 
RИД0 и nИД0 - длина и единичное направление радиус-вектора между центром измерительного датчика и центром тела 0; (nn)ИД0 - матрица 3×3, образованная произведением столбца nИД0 на строку nИД0; I - единичная 3×3 матрица;
Для компенсационного датчика все пояснения аналогичны пояснениям для измерительного датчика, просто индекс ИД0 меняется на КД0;
-1 - символ обратной матрицы содержимого скобок правой части формулы;
ΔВИК - разность показаний измерительного и компенсационного магнитометров, Тл. Иногда для краткости эту матрицу называют координатной матрицей.
Заявляемый способ (фиг. 2) действует по следующему уравнению измерения

где ΔМнд(2)- погрешность уравнения измерения (2), Ам2; p - число участков разделения тела; i - индекс каждого участка тела 1; RИДi - расстояние между ИД и центром i-го участка тела 1; RКДi - расстояние между КД и центром i-го участка тела 1. В схеме на фиг. 2 р=5, i=5, 6, 7, 8, 9. Остальные пояснения аналогичны (1) и поэтому опущены.
Заявляемый способ проверен с помощью компьютерного моделирования (КМ) измерений MM (106 Ам2) тела длиной 121 м. RКД2=RИД2+50 м. (Более подробно методика КМ изложена в [3]). Оценки относительных результирующих погрешностей δ и методических составляющих δМ для известного и заявляемого способов (при р=3) представлены ниже в функции RИД0
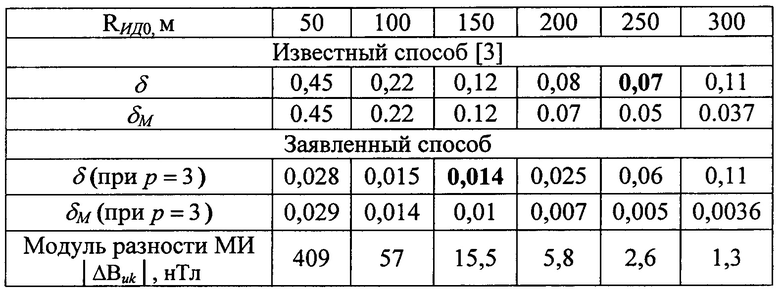
Как видно из таблицы, заявляемый способ обеспечивает 5-тикратное повышение точности измерения ММ при разделении тела всего лишь на три участка (сравните минимумы погрешностей, выделенные полужирным шрифтом 0.07 и 0.014). Погрешности в строке слева от минимума определяются методическими составляющими, справа - инструментальными составляющими, которые, пропорциональны третьей степени расстояния RИД0, как показано в [3]. Заявляемый способ обеспечивает снижение методической составляющей и через нее - снижение всей результирующей погрешности слева от минимума известного способа 0.07. В результате в заявляемом способе минимум 0.014 образуется при меньшем расстоянии (100-150 м) и появляется возможность работы дифференциального магнитометра на более высоких (точных) пределах измерения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения магнитного момента тела удлиненной формы | 2020 |
|
RU2755026C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАГНИТНОГО МОМЕНТА КВАДРАТНОЙ КАТУШКИ С ТОКОМ | 2006 |
|
RU2307370C1 |
| СПОСОБ ИЗМЕРЕНИЯ МАГНИТНОГО МОМЕНТА КРУПНОГАБАРИТНОГО ТЕЛА УДЛИНЕННОЙ ФОРМЫ | 2005 |
|
RU2303792C1 |
| СПОСОБ РАЗДЕЛЬНОГО ИЗМЕРЕНИЯ ИНДУКТИВНОГО И ПОСТОЯННОГО МАГНИТНЫХ МОМЕНТОВ КРУПНОГАБАРИТНОГО ФЕРРОМАГНИТНОГО ТЕЛА УДЛИНЕННОЙ ФОРМЫ | 2005 |
|
RU2293345C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПРИРАЩЕНИЯ ИНДУКЦИИ МАГНИТНОГО ПОЛЯ ТРЕХКОМПОНЕНТНЫМ ДИФФЕРЕНЦИАЛЬНЫМ МАГНИТОМЕТРОМ | 2006 |
|
RU2313801C1 |
| СПОСОБ ЛОКАЛИЗАЦИИ МАГНИТНОГО ДИПОЛЯ | 2010 |
|
RU2456642C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВНЕШНЕЙ ПОМЕХИ В ЦЕНТРЕ МЕРЫ МАГНИТНОЙ ИНДУКЦИИ | 2008 |
|
RU2394251C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И ОРИЕНТАЦИИ ТРЕХКОМПОНЕНТНОГО ДАТЧИКА МАГНИТОМЕТРА ОТНОСИТЕЛЬНО МЕРЫ МАГНИТНОГО МОМЕНТА | 2005 |
|
RU2290657C1 |
| УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОЙ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПОДЗЕМНЫХ ТРУБОПРОВОДОВ С ВОЗМОЖНОСТЬЮ КАЛИБРОВКИ В ПОЛЕВЫХ УСЛОВИЯХ | 2016 |
|
RU2620326C1 |
| Трехкомпонентная мера магнитного момента | 2024 |
|
RU2824326C1 |
Изобретение относится к области измерения магнитного момента (ММ). Сущность изобретения заключается в том, что намагниченное тело делят на продольные участки одинакового объема, измеряют расстояния между центрами участков и измерительным и компенсационным датчиками трехкомпонентного дифференциального магнитометра, находят среднюю координатную матрицу для этих участков. По результатам измерения дифференциальным магнитометром индукции магнитного поля тела на расстоянии, равном примерно 0.8-1.4 длины тела, и по обратной средней для всех участков координатной матрице вычисляют искомый ММ тела. Технический результат – повышение точности измерения ММ. 2 ил., 1 табл.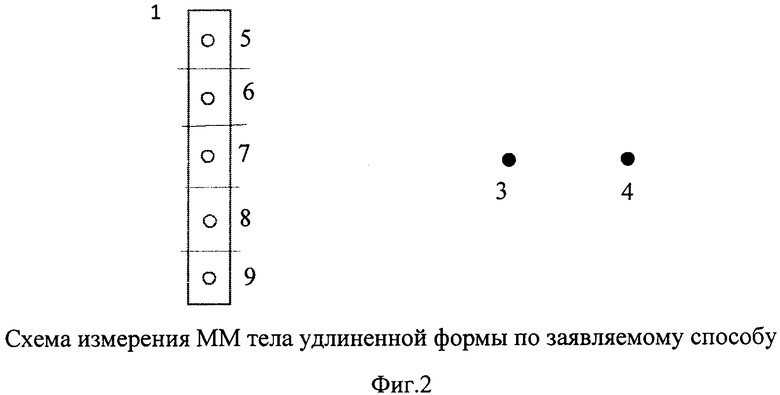
Способ измерения магнитного момента тела удлиненной формы путем измерения разности магнитной индукции в дальней зоне тела трехкомпонентными измерительным и компенсационным магнитометрами и расстояний между датчиками магнитометров и телом, отличающийся тем, что тело делят на продольные участки одинакового объема, измеряют расстояния между центрами участков и датчиков, затем измеряют магнитный момент по формуле

где М - измеряемый магнитный момент, Ам2;
μ0=4π×10-7 Гн/м - магнитная постоянная;
р - число участков разделения тела;
i=1, 2…p - индекс каждого участка;
 - градиент градиента
- градиент градиента  ;
;
RИДi - расстояние между центрами измерительного датчика и i-го участка, м;
RКДi - расстояние между центрами компенсационного датчика и i-го участка, м;
-1 - символ обратной матрицы содержимого внешних скобок правой части формулы;
ΔВИК - разность показаний измерительного и компенсационного магнитометров, Тл.
| СПОСОБ ИЗМЕРЕНИЯ МАГНИТНОГО МОМЕНТА КРУПНОГАБАРИТНОГО ТЕЛА УДЛИНЕННОЙ ФОРМЫ | 2005 |
|
RU2303792C1 |
| СПОСОБ РАЗДЕЛЬНОГО ИЗМЕРЕНИЯ ИНДУКТИВНОГО И ПОСТОЯННОГО МАГНИТНЫХ МОМЕНТОВ КРУПНОГАБАРИТНОГО ФЕРРОМАГНИТНОГО ТЕЛА УДЛИНЕННОЙ ФОРМЫ | 2005 |
|
RU2293345C1 |
| СПОСОБ ИЗМЕРЕНИЯ МАГНИТНЫХ МОМЕНТОВ ОБЪЕКТА | 2016 |
|
RU2628448C1 |
| CN 104375102 A, 25.02.2015. | |||

