Изобретение относится к области гидроакустики и радиотехники и может быть использовано для построения систем обнаружения сигнала гидролокатора.
Известны способы обнаружения эхосигнала, основанные на приеме эхосигнала гидролокатора на фоне шумов и помех в среде, преобразовании акустического сигнала в электрический гидроакустической антенной, определении энергетического спектра электрического процесса на выходе гидроакустической антенны, представляющего собой смесь электрического сигнала и нормальной стационарной шумовой помехи, изложенные, например в работе Евтютов Е.С. и Митько В.Б. "Примеры инженерных расчетов в гидроакустике", Судостроение, 1981 г., с.77. Способ содержат спектральный анализ этого процесса, детектирование спектральных составляющих, интегрирование огибающей и обнаружение сигнала при сравнении с порогом.
Аналогичный способ обнаружения эхосигнала изложен в книге B.C. Бурдик "Анализ гидроакустических систем", Судостроение, 1988 г., с.347 и содержит многоканальную по частоте фильтрацию, детектирование, выделение огибающей и сравнение с порогом.
Подобный способ приведен в "Справочнике по гидроакустике", Судостроение, 1988 г., с.27. При этом под спектральным анализом понимают, как правило, полосовую фильтрацию, выделяющую основную энергию электрического процесса. При использовании цифровой техники в качестве спектрального анализа применяют процедуры быстрого преобразования Фурье (БПФ), которые обеспечивают выделение и измерение энергетического спектра шумового электрического процесса. "Применение цифровой обработки сигналов", М.: Мир, 1990 г., с.296. Перечисленные способы характеризуются недостаточной помехоустойчивостью.
Наиболее близким аналогом предлагаемого технического решения является способ обнаружения эхосигнала, рассмотренный в книге Л. Рабинер, Б. Гоулд "Теория и применение цифровой обработки сигналов", М.: Мир, 1978 г.
Способ содержит следующие операции:
- излучение зондирующего сигнала длительностью Т на известной частоте;
- прием эхосигнала в смеси с шумовой помехой гидроакустической антенной;
- дискретизацию электрического сигнала на выходе гидроакустической антенны сигнала;
- набор входных дискретизированных отсчетов длительностью Т;
- определение энергетического спектра с помощью БПФ;
- сдвиг набора электрического сигнала по времени;
- многократное повторение процедуры набора сдвинутых во времени входных дискретизированных отсчетов длительностью Т и определение энергетического спектра;
- выбор набора с максимальной энергией сигнала;
- принятие решения об обнаружении по набору с максимальной энергией сигнала.
Недостатком способа-прототипа является низкая помехоустойчивость при приеме акустического эхосигнала в присутствии шумов и помех.
Задачей изобретения является повышение помехоустойчивости при обнаружении эхосигнала в присутствии шумов и помех.
Для решения поставленной задачи, что в известный способ обнаружения эхосигнала гидролокатора, содержащий излучение зондирующего сигнала, прием эхосигнала в смеси с шумовой помехой гидроакустической антенной, дискретизацию электрического сигнала на выходе антенны, набор дискретизированных отсчетов электрического сигнала длительностью Т, получение последовательно, через равные промежутки времени за все время обнаружения наборов дискретизированных отсчетов электрического сигнала и быстрое преобразование Фурье полученных наборов дискретизированных отсчетов введены новые операции, а именно:
- по каждому набору дискретизированных отсчетов электрического сигнала определяют комплексный спектр;
- сдвиг наборов осуществляют на время 1/8<ΔT<1/2Т;
- запоминают каждый предыдущий и каждый последующий набор комплексных спектров;
- определяют взаимный спектр между каждым предыдущим и каждым последующим наборами;
- выбирают взаимный спектр, имеющий максимальную энергию, по которому принимают решение об обнаружении сигнала.
Техническим результатом от использования изобретения является уменьшение суммарной помехи и повышение отношения сигнал/помеха при определении взаимного спектра эхосигнала при малом отношении сигнал/ помеха. Поясним достижение указанного результата.
Известно, что если имеются два процесса x(t) и y(t), то преобразование Фурье к-х реализации длиной Т каждого процесса определяется в виде
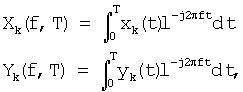
где Т - длительность сигнала с частотой f.
Тогда взаимный спектр этих двух случайных процессов определяется, с использованием свертки X×Y, соотношением
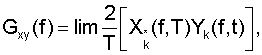
где  - комплексно-сопряженный спектр для комплексного спектра Yk(f, T).
- комплексно-сопряженный спектр для комплексного спектра Yk(f, T).
Если взаимный спектр определяется между двумя реализациями одного и того же сигнала, то
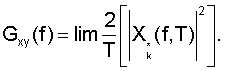
Если взаимный спектр определяется между двумя реализациями нормального стационарного шума, сдвинутыми на интервал больше, чем интервал корреляции шумового процесса, то произведение Xk(f, T)пом и Yk+Δt(f, t)пом будет мало, так как Х и Y независимы.
Таким образом, если взаимный спектр определяется между двумя одинаковыми сигналами, то он максимальный, если он определяется между независимыми сигналами, то он равен 0.
При наборе дискретизированных отсчетов длительностью Т входной реализации, в которой временное положение эхосигнала не определено, в набор может войти только часть сигнала, а следующая часть будет набрана в следующем наборе дискретизированных отсчетов.
При наличии сигнала в соседних сдвинутых во времени наборах дискретизированных отсчетов величина взаимного спектра будет увеличиваться в зависимости от величины перекрытия наборов.
Максимальная оценка взаимного спектра будет при малом сдвиге между наборами дискретизированных отсчетов, но тогда и помеха в соседних наборах будет одна и та же. Минимальный взаимный спектр для сигнала будет при временном сдвиге, превышающем длительность сигнала.
При обработке эхосигнала методом, предложенным в прототипе, амплитуда эхосигнала определяется только величиной длительности сигнала, попавшего на обработку при выбранном интервале сдвига. При использовании предлагаемого метода энергия эхосигнала будет определяться взаимным спектром, равным произведению энергий сигналов, содержащихся в части сигналов предыдущего и последующего наборов.
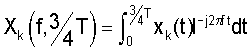
Если накрыта часть сигнала длительности Т, например  , то процесс на выходе БПФ для прототипа будет определяться выражением
, то процесс на выходе БПФ для прототипа будет определяться выражением
Для взаимного спектра между предыдущим и последующим наборами, сдвинутыми на 

Для помехи любое произведение  и
и  будет мало в силу независимости помехи в двух временных наборах, разнесенных на интервал
будет мало в силу независимости помехи в двух временных наборах, разнесенных на интервал
 большим, чем интервал корреляции помехи, где
большим, чем интервал корреляции помехи, где  - комплексная оценка спектра предыдущего набора.
- комплексная оценка спектра предыдущего набора.
Интервал корреляции помехи определяется шириной полосы приемного тракта Δf. Следует выбирать интервал сдвига больше, чем интервал  , но меньше, чем длительность используемого сигнала гидролокатора.
, но меньше, чем длительность используемого сигнала гидролокатора.
С другой стороны, необходимо получить несколько оценок взаимной спектральной плотности. Если выбрать набор временной реализации через Т, тогда нельзя получить взаимный спектр, поскольку сигнал можно будет получить только один раз и будет только один взаимный спектр между сигналом и помехой и выбирать будет не из чего. Наиболее рационально выбирать длительность сдвига между наборами 1/8Т<ΔT<1/2Т, тогда помеха между наборами будет не коррелирована, а для сигнала взаимная спектральная плотность будет определяться между несколькими наборами входного дискретизированного процесса. Этот результат был получен экспериментально.
Сущность изобретения поясняется чертежом, на котором изображена блок-схема устройства, реализующего данный способ. Устройство содержит гидроакустическую антенну 1, дискретизатор входного процесса 2, блок набора входного сигнала 3, коммутатор 4, блоки вычисления очередного спектра БПФ 5 и 6, блок вычисления взаимного спектра 7, блок памяти 8 и блок принятия решения 9. С помощью описанного выше устройства предложенный способ реализуется следующим образом.
Акустический сигнал поступает на вход гидроакустической антенны 1 и далее через дискретизатор 2 отсчеты входного сигнала поступают на вход блока набора дискретизированных отсчетов электрического сигнала 3, где производится набор дискретизованных отсчетов длительности Т, и через коммутатор 4 поступают на блок БПФ 5, в котором определяется комплексный спектр, поданного набора дискретизированных отсчетов длительностью Т.
Следующий набор дискретизованных отсчетов длительностью Т, сдвинутый относительно первого на интервал Δt, через коммутатор 4 поступает на блок БПФ-6, в котором определяется комплексный спектр последующего набора. После чего определенные комплексные спектры в блоках 5 и 6 поступают на блок вычисления взаимного спектра 7 и далее в блок памяти 8. Выход блока 8 соединен со входом блока 9, где сравниваются максимумы и принимается решение об обнаружении сигнала. Процедура определения максимума производится на весь период обработки информации, который определяется циклом излучение - прием. Поскольку помеха между наборами дискретизированных отсчетов не коррелирована, то энергия взаимной спектральной плотности помехи между наборами будет мала. Для сигнала энергия взаимного спектра будет определяться величиной перекрытия последующих наборов дискретизированных отсчетов, и при наличии в них сигналов он будет существенно больше энергии помехи. Таким образом, поставленная задача решена.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КЛАССИФИКАЦИИ ЭХО-СИГНАЛА ГИДРОЛОКАТОРА | 2011 |
|
RU2466419C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТА И ИЗМЕРЕНИЯ ЕГО ПАРАМЕТРОВ | 2016 |
|
RU2627977C1 |
| Способ определения параметров цели гидролокатором | 2017 |
|
RU2650835C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДИСТАНЦИИ ГИДРОЛОКАТОРОМ | 2011 |
|
RU2460093C1 |
| Гидролокационный способ обнаружения объекта и измерения его параметров | 2018 |
|
RU2697937C1 |
| Способ классификации эхо-сигнала гидролокатора | 2017 |
|
RU2660219C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИСТАНЦИИ ГИДРОЛОКАТОРОМ | 2015 |
|
RU2612201C1 |
| Гидроакустический способ определения параметров цели при использовании взрывного сигнала с беспроводной системой связи | 2018 |
|
RU2692841C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ КЛАССИФИКАЦИИ | 2011 |
|
RU2461020C1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ КЛАССИФИКАЦИИ ГИДРОЛОКАТОРА БЛИЖНЕГО ДЕЙСТВИЯ | 2011 |
|
RU2465618C1 |
Изобретение относится к области гидроакустики и радиотехники и может быть использовано для построения систем обнаружения сигнала гидролокатора. Техническим результатом является повышение помехоустойчивости при обнаружении эхосигнала в присутствии шумов и помех. Способ обнаружения эхосигнала гидролокатора содержит излучение зондирующего сигнала, прием в смеси с шумовой помехой эхосигнала гидроакустической антенной, дискретизацию электрического сигнала на выходе гидроакустической антенны, набор дискретизированных отсчетов электрического сигнала длительностью Т, получение последовательно, через равные промежутки времени за все время обнаружения наборов дискретизированных отсчетов электрического сигнала и быстрое преобразование Фурье полученных наборов дискретизированных отсчетов, при этом по каждому набору дискретизированных отсчетов электрического сигнала определяют комплексный спектр, сдвиг наборов осуществляют на время 1/8Т<ΔТ<1/2Т, запоминают каждый предыдущий и каждый последующий комплексный спектры, определяют взаимный спектр между каждым предыдущим и каждым последующим наборами, выбирают набор с максимальным энергетическим спектром, по которому принимают решение об обнаружении сигнала. 1 ил.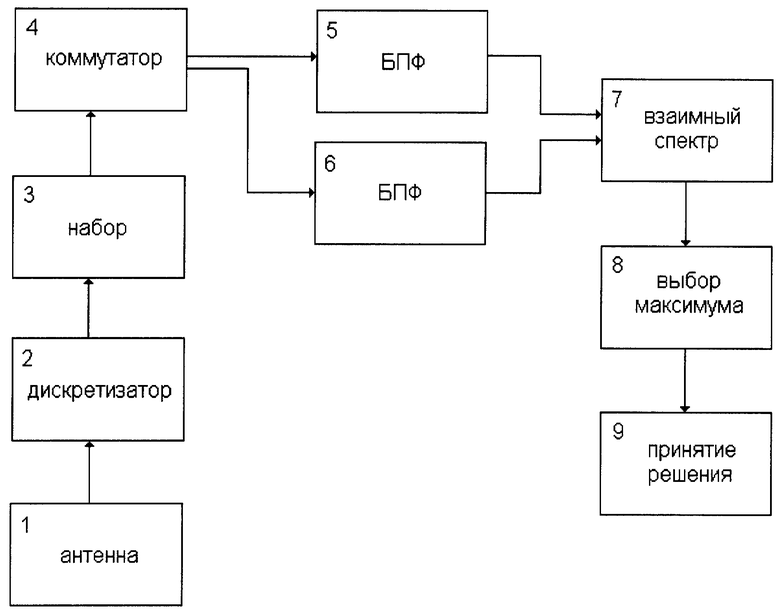
Способ обнаружения эхосигнала гидролокатора, содержащий излучение зондирующего сигнала, прием в смеси с шумовой помехой эхосигнала гидроакустической антенной, дискретизацию электрического сигнала на выходе гидроакустической антенны, набор дискретизированных отсчетов электрического сигнала длительностью Т, получение последовательно через равные промежутки времени за все время обнаружения наборов дискретизированных отсчетов электрического сигнала и быстрое преобразование Фурье полученных наборов дискретизированных отсчетов, отличающийся тем, что по каждому набору дискретизированных отсчетов электрического сигнала определяют комплексный спектр, сдвиг наборов осуществляют на время 1/8Т<ΔТ<1/2Т, запоминают каждый предыдущий и каждый последующий комплексные спектры, определяют взаимный спектр между каждым предыдущим и каждым последующим наборами, выбирают набор с максимальным энергетическим спектром, по которому принимают решение об обнаружении сигнала.
| РАБИНЕР Л | |||
| и др | |||
| Теория и применение цифровой обработки сигналов | |||
| - М.: Мир, 1978 | |||
| СПОСОБ ОБНАРУЖЕНИЯ ШУМЯЩИХ ОБЪЕКТОВ | 1995 |
|
RU2110810C1 |
| СПОСОБ ОБНАРУЖЕНИЯ НИЗКОЧАСТОТНЫХ ГИДРОАКУСТИЧЕСКИХ ИЗЛУЧЕНИЙ | 1995 |
|
RU2096808C1 |
| ГИДРОЛОКАЦИОННЫЙ СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ, ДВИЖУЩИХСЯ С МАЛОЙ РАДИАЛЬНОЙ СКОРОСТЬЮ В КОНТРОЛИРУЕМОЙ АКВАТОРИИ, И ГИДРОЛОКАЦИОННАЯ СТАНЦИЯ КРУГОВОГО ОБЗОРА, РЕАЛИЗУЮЩАЯ ЭТОТ СПОСОБ | 2002 |
|
RU2242021C2 |
| US 3870988 A, 11.03.1975 | |||
| US 2002190902 A, 19.12.2002 | |||
| WO 9927385 A, 03.06.1999. | |||

