Изобретение относится к области гидроакустики и радиотехники и может быть использовано для построения систем обнаружения сигнала гидролокатора и, в частности, повышения точности измерения дистанции при использовании зондирующих сигналов большой длительности.
Разрешающая способность зондирующего сигнала определяется шириной функции неопределенности по измеряемому параметру. Чем больше длительность сигнала, тем хуже разрешающая способность по дальности. (Д.Е.Вакман. Сложные сигналы и принцип неопределенности в радиолокации. Сов. Радио. 1965 г. М., стр 111).
Известны способы измерения дистанции, основанные на приеме эхосигнала гидролокатора на фоне шумов, преобразование акустического сигнала в электрический гидроакустической антенной, определении энергетического спектра электрического процесса, представляющего собой смесь электрического сигнала и нормальной стационарной шумовой помехи, изложенные, например, в работе Евтютова Е.С. и Митько В.Б. "Примеры инженерных расчетов в гидроакустике", Судостроение, 1981 г., с.77. Способ содержат спектральный анализ этого процесса, детектирование спектральных составляющих, интегрирование огибающей и обнаружение сигнала при сравнении с порогом. В момент превышения выбранного порога определяется время задержки эхосигнала и по нему высчитывается дистанция до цели.
Аналогичный способ обнаружения эхосигнала и измерения дистанции изложен в книге B.C.Бурдика "Анализ гидроакустических систем". Судостроение, 1988 г. стр.347 и содержит многоканальную по частоте фильтрацию, детектирование, выделение огибающей и сравнение с порогом. По каналу с максимальной амплитудой сигнала по частоте определяется смещение спектра, которое пропорционально радиальной скорости цели, а по моменту превышения выбранного порога определяется задержка эхосигнала и дистанция до цели.
Подобный способ приведен в "Справочнике по гидроакустике", Судостроение 1988 г. стр.27. При этом под спектральным анализом понимают, как правило, полосовую фильтрацию, выделяющую основную энергию электрического процесса. При использовании цифровой техники в качестве спектрального анализа применяют процедуры быстрого преобразования Фурье (БПФ), которые обеспечивают выделение и измерение энергетического спектра шумового электрического процесса ("Применение цифровой обработки сигналов", изд. Мир М. 1990 г. стр.296). Перечисленные способы имеют точность измерения дистанции, определяемую длительностью зондирующего сигнала
Наиболее близким аналогом предлагаемого технического решения является способ обнаружения эхосигнала и измерения дистанции, рассмотренный в книге Л.Рабинера, Б.Гоулда «Теория и применение цифровой обработки сигналов», Мир, Москва, 1978 г.
Способ содержит следующие операции:
- излучение зондирующего сигнала длительностью Т на известной частоте;
- прием эхосигнала в смеси с шумовой помехой гидроакустической антенной;
- дискретизацию электрического сигнала на выходе гидроакустической антенны;
- набор приемным устройством дискретизированных отсчетов длительностью T;
- определение энергетического спектра с помощью процедуры быстрого преобразования Фурье (БПФ);
- многократное повторение процедуры набора дискретизированных отсчетов длительностью T через равные промежутки времени и определение энергетического спектра каждого набора;
- выбор набора с максимальной энергией сигнала;
- принятие решения об обнаружении по набору с максимальной энергией сигнала.
Недостатком способа-прототипа является низкая точность измерения дистанции, определяемая временным сдвигом набора временной реализации, и смещение оценки измерения дистанции. Измерение дистанции по временному положению набора с максимальной энергией сигнала определяется с ошибкой смещения оценки дистанции относительно начала момента истинного положения цели, определяемого временем начала отражения.
Задачей изобретения является повышение точности измерения дистанции.
Для решения поставленной задачи в известный способ измерения дистанции, содержащий излучение зондирующего сигнала, прием эхосигнала, дискретизацию принятой временной реализации эхосигнала, набор временной реализации дискретизированных отсчетов длительностью T, определение спектра набранной временной реализации, введены новые операции, а именно: определяют значение спектрального отсчета, превысившего порог, запоминают амплитуду спектрального отсчета, превысившего порог, и время набора временной реализации, производят набор следующей временной реализации длительностью T, сдвинутой относительно реализации, где обнаружено превышение порога, на время T/4, определяют спектр набранной временной реализации, сдвинутой относительно реализации, превысившей порог на время T/4, определяют значение спектрального отсчета, превысившего порог, запоминают амплитуду и время начала набора временной реализаций, сравнивают номера спектральных отсчетов этих реализаций и при их совпадении определяют дистанцию до цели по формуле:
Д=С(t-X)/2,
где t - временной отсчет начала временного набора, спектрального отсчета реализации, сдвинутой относительно реализации, превысившей порог на время T/4;
C - скорость звука в воде, а X определяется по формуле
 ,
,
где Y1 - амплитуда спектрального отсчета набора временной реализации, превысившей порог;
Y2 - амплитуда спектрального отсчета набора временной реализации, сдвинутой относительно реализации, превысившей порог на время T/4;
T - длительность временного набора.
Техническим результатом от использования изобретения является повышение точности измерения дистанции путем устранения ошибки смещения оценки дистанции при использовании зондирующего сигнала большой длительности при одновременном сохранении разрешающей способности по частоте, которая определяет радиальную скорость цели.
Поясним достижение указанного результата.
Известно, что если имеется процесс x(t), то преобразование Фурье к-й реализации длительностью T процесса определяется в виде

где T - длительность сигнала с частотой f.
При наборе дискретизированных отсчетов длительностью T входной реализации, в которой временное положение эхосигнала не определено, в набор может войти только часть сигнала, а следующая часть будет набрана в следующем наборе дискретизированных отсчетов.
При наличии сигнала в соседних сдвинутых во времени наборах дискретизированных отсчетов величина спектрального отсчета будет увеличиваться в зависимости от величины набранной части эхосигнала.
При обработке эхосигнала методом, предложенным в способе-прототипе, амплитуда эхосигнала определяется только величиной длительности эхосигнала, попавшего на обработку при выбранном интервале сдвига, и в качестве оценки дистанции выбирается временной интервал, который содержит максимальное значение амплитуды спектральной составляющей. Временное значение этого интервала определяет выдаваемую оценку дистанции до цели.
Так, для спектрального отсчета, соответствующего набору, в который попала 1/4 Т часть эхосигнала, энергия спектрального отсчета будет определяться этим временем накрытия части эхосигнала

Если будет накрыта часть эхосигнала длительностью, например, 3/4 Т, то процесс на выходе БПФ будет определяться выражением

что существенно больше, чем в предыдущем случае. Максимальная энергия спектрального отсчета будет при максимальном накрытии временного набора длительности эхосигнала. Однако действительное положение дистанции до цели будет определяться моментом начала отражения, который находится во временном наборе части эхосигнала, где спектральный отсчет превысил порог. Этот момент времени является случайным и при выбранном временном интервале набора входных отсчетов не определяется. Предлагается последовательность измерительных операций, которая позволит определить момент начала отражения от цели. Необходимым условием, определяющим момент измерения дистанции, является совпадение номеров спектральных отсчетов в последовательных наборах. Это происходит автоматически, поскольку производится последовательное запоминание всех необходимых параметров последовательных временных наборов, превысивших порог, для определения дистанции. На фиг. 1 приведена схема, поясняющая принцип работы предлагаемого метода. Набор временных реализаций осуществляется последовательно через время, равное T/4, где T - длительность зондирующего сигнала. По оси дистанции располагаются спектры, сдвинутые друг относительно друга на T/4, амплитуды спектральных отсчетов имеют значения Y1 и Y2. Обозначено значение и положение оценки дистанции до цели - Д цели, полученное предлагаемым методом.
Выбранная величина временного интервала между наборами является оптимальной и наиболее часто используется на практике. Каждый начальный момент набора входных дискретизированных отсчетов является известной величиной, и интервал между наборами является известной фиксированной величиной. Поэтому всегда может быть зафиксирован момент времени того набора временных отсчетов, где произошло превышение спектрального отсчета на выходе БПФ выбранного порога. Фиксируется и запоминается момент временного набора и амплитуда спектрального отсчета Y1. Определяется спектр следующего временного набора дискретизированных входных отсчетов, сравниваются амплитуды спектров на выходе БПФ с порогом, и при превышении порога запоминается время набора временного интервала, значение спектрального отсчета и амплитуда спектрального отсчета Y2. Сравниваются значения спектральных отсчетов в последовательных временных интервалах, и при их совпадении определяется дистанция до цели. Как видно из фиг.1, тангенс угла наклона может быть определен по формулам tgA=Y1/X и tgA=Y2/T+X, где T - длительность зондирующего сигнала. Теперь можно будет определить величину временного сдвига X, который определяет момент начала входного эхосигнала на реализации, соответствующей набору дискретизированных временных отсчетов.
Этот сдвиг находится между двумя последовательными наборами, в которых обнаружен один и тот же спектральный отсчет, который превысил порог, и он равен  .
.
Зная эту величину сдвига, можно определить момент отсчета начала эхосигнала между временными наборами и, соответственно, задержку эхосигнала относительно начала излучения, что будет соответствовать дистанции до цели. Момент начала эхосигнала можно определять относительно времени набора временной реализации, в которой произошло первичное превышение спектрального отсчета порога, или относительно момента набора последующей временной реализации, в которой произошло превышение амплитуды того же спектрального отсчета выбранного порога.
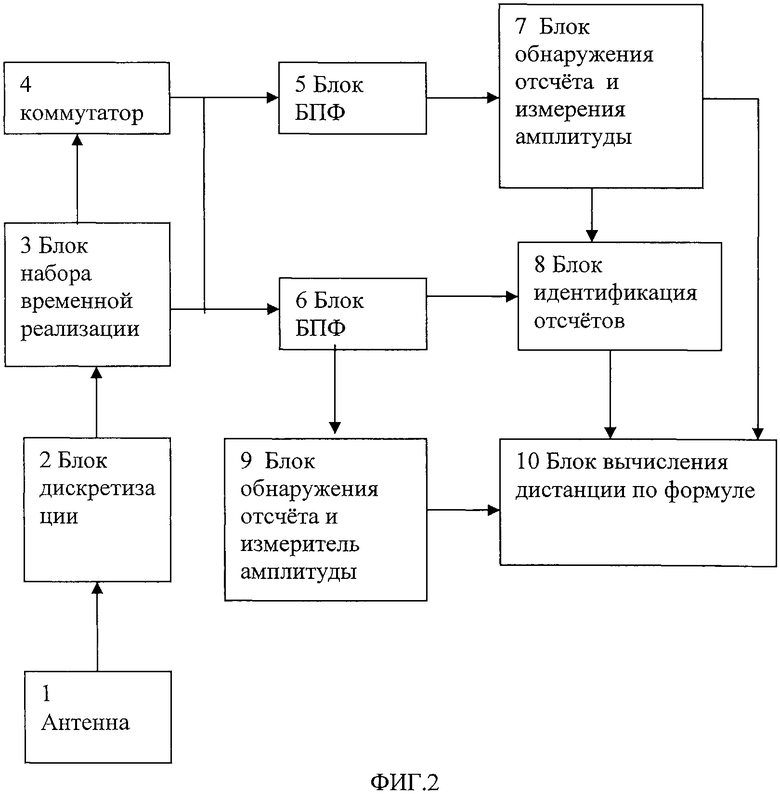
Сущность изобретения поясняется фиг 1 и 2, где на фиг. 1 приведено пояснение к заявленному способу, на фиг.2 изображена блок-схема устройства, реализующего этот способ.
Устройство содержит антенну 1, дискретизатор 2 временных отсчетов, блок 3 набора временной реализации, коммутатор 4 временных наборов, блок 5 вычисления спектра первой временной реализации (БПФ1), блок 6 вычисления спектра второй временной реализации (БПФ2), блок 7 обнаружения отсчета и измеритель амплитуды первой временной реализации, блок 8 обнаружения отсчета и измеритель амплитуды второй временной реализации, блок 9 идентификации временных отсчетов, блок 10 определения дистанции по формуле.
Выход антенны 1 соединен через дискретизатор 2, блок 3 набора временной реализации и коммутатор 4 с блоком 5, выход которого соединен с блоком 7, и через его первый выход соединен с первым входом вычислителя 10, а второй выход с первым входом блока 9, выход которого соединен со вторым входом блока вычисления 10. Второй выход коммутатора 4 соединен со входом блока 6, выход которого через блок 8 соединен со вторым входом блока идентификации отсчетов 9. Второй выход блока 8 соединен с третьим входом блока вычисления дистанции 10.
В настоящее время практически вся гидроакустическая аппаратура выполняется на спецпроцессорах, которые преобразуют акустический сигнал в цифровой вид и производят в цифровом виде формирование характеристик направленности, многоканальную обработку и спектральную обработку, измерение помехи, обнаружение сигнала и сравнение с порогом, обработку по времени и по частоте и принятие решения о цели. Эти вопросы достаточно подробно рассмотрены в книге «Применение цифровой обработки сигналов» п/р Оппенгейма. М.: Мир 1980 г. Вычислители спектров, как правило, выполнены на спецпроцессорах БПФ. Дискретизаторы, блоки набора временной реализации и коммутаторы являются известными устройствами и достаточно подробно изложены в литературе по цифровой технике.
С помощью описанного выше устройства предложенный способ реализуется следующим образом.
Отраженный от цели эхосигнал поступает на вход антенны 1 и далее через дискретизатор 2 отсчеты входного сигнала поступают на вход блока 3 набора дискретизированных отсчетов электрического сигнала, где производится набор дискретизованных отсчетов длительности T, и через коммутатор 4 поступают на блок 5 (БПФ1), в котором определяется энергетический спектр, поданного набора дискретизированных отсчетов длительностью T. Следующий набор дискретизованных отсчетов длительностью T, набранный относительно первого со сдвигом по времени, равным T/4, через коммутатор 4 поступает на блок 6 (БПФ2), в котором определяется энергетический спектр последующего набора. С выхода блока 5 отсчеты спектра поступают в блок 7, где происходит сравнение с порогом, обнаружение спектрального отсчета, превысившего порог, запоминание номера спектрального отсчета и запоминание амплитуды спектрального отсчета. С выхода блока 6 отсчеты энергетического спектра поступают в блок 8, где происходит сравнение с порогом, обнаружение спектрального отсчета, превысившего порог, запоминание номера спектрального отсчета и запоминание амплитуды спектрального отсчета временной реализации, сдвинутой на время T/4. В блоке 9 производится сравнение номеров спектральных отсчетов, и при их совпадении выдается команда на определение дистанции до цели в блок 10, на входы которого поступают исходные данные для расчета дистанции по приведенной формуле.
Таким образом, использование зондирующего сигнала большой длительности обеспечивает измерение частоты эхосигнала с точностью потенциальной разрешающей способности по частоте, что необходимо для измерения скорости цели. Кроме того, использование предлагаемой процедуры измерений и вычислений обеспечивает высокую точность определения дистанции, оценка которой не имеет систематической ошибки смещения, свойственной имеющимся системам измерения дистанции при использовании зондирующих сигналов большой длительности.
Изобретение относится к области гидроакустики. Техническим результатом изобретения является повышение точности измерения дистанции при использовании сигналов большой длительности при одновременной потенциальной точности измерения скорости цели. Согласно способу осуществляют излучение зондирующего сигнала, прием эхосигнала, дискретизацию принятой временной реализации эхосигнала, набор временной реализации дискретизированных отсчетов длительностью Т, определение спектра набранной временной реализации, определяют значение спектрального отсчета, превысившего порог, запоминают амплитуду спектрального отсчета, превысившего порог, и время набора временной реализации. После чего производят набор следующей временной реализации длительностью Т, сдвинутой относительно превысившей порог на время Т/4, определяют спектр набранной временной реализации, сдвинутой относительно реализации, превысившей порог, на время Т/4, определяют значение спектрального отсчета, превысившего порог, запоминают амплитуду и время набора временной реализации, сравнивают номера спектральных отсчетов этих реализаций и при их совпадении определяют дистанцию до цели по приведенному математическому соотношению. 2 ил.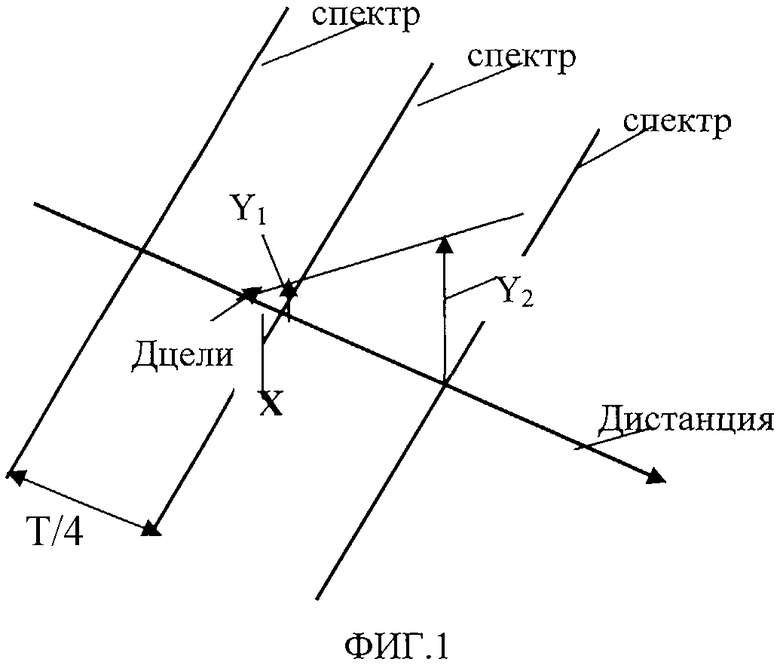
Способ измерения дистанции, содержащий излучение зондирующего сигнала, прием эхосигнала, дискретизацию принятой временной реализации эхосигнала, набор временной реализации дискретизированных отсчетов длительностью Т, определение спектра набранной временной реализации, отличающийся тем, что определяют значение спектрального отсчета, превысившего порог, запоминают амплитуду спектрального отсчета, превысившего порог, и время набора временной реализации, производят набор следующей временной реализации длительностью Т, сдвинутой относительно превысившей порог на время Т/4, определяют спектр набранной временной реализации, сдвинутой относительно реализации, превысившей порог на время Т/4, определяют значение спектрального отсчета, превысившего порог, запоминают амплитуду и время набора временной реализации, сравнивают номера спектральных отсчетов этих реализаций и при их совпадении определяют дистанцию до цели по формуле:
Д=С(t-Х)/2,
где t - временной отсчет начала временного набора; спектрального отсчета реализации, сдвинутой относительно реализации, превысившей порог на время Т/4, С - скорость звука, а Х определяется по формуле  , где Y1 - амплитуда спектрального отсчета набора временной реализации, превысившей порог; Y2 - амплитуда спектрального отсчета набора временной реализации; сдвинутой относительно реализации, превысившей порог на время Т/4.
, где Y1 - амплитуда спектрального отсчета набора временной реализации, превысившей порог; Y2 - амплитуда спектрального отсчета набора временной реализации; сдвинутой относительно реализации, превысившей порог на время Т/4.
| ПРИЕМНОЕ УСТРОЙСТВО ГИДРОАКУСТИЧЕСКОЙ СИСТЕМЫ ИЗМЕРЕНИЯ ДИСТАНЦИИ | 1993 |
|
RU2081434C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2101730C1 |
| ЭХОЛОТ | 2003 |
|
RU2241242C1 |
| US 4464738 A, 07.08.1984 | |||
| Установка для получения заменителя цельного молока | 1984 |
|
SU1346106A1 |

