Изобретение относится к области гидроакустики и может быть использовано для построения систем классификации объектов, обнаруженных при работе в режиме гидролокации.
Известен способ обнаружения объекта, основанный на приеме эхо-сигнала от объекта в смеси с помехой, который содержит спектральный анализ этого процесса, детектирование спектральных составляющих, интегрирование огибающей и обнаружение сигнала при сравнении с порогом, изложенный, например, в работе Евтютов Е.С.и Митько В.Б. "Примеры инженерных расчетов в гидроакустике", Судостроение, 1981 г, с. 77. Способ реализует классификацию эхо-сигнала и помехи.
Подобный способ приведен в "Справочнике по гидроакустике", Судостроение 1988 г. стр. 27. При этом под спектральным анализом понимают, как правило, полосовую фильтрацию, выделяющую основную энергию электрического процесса. При использовании цифровой техники в качестве спектрального анализа применяют процедуры быстрого преобразования Фурье (БПФ), которые обеспечивают выделение и измерение энергетического спектра шумового электрического процесса ("Применение цифровой обработки сигналов", изд. Мир, М., 1990 г., стр. 296).
Известен способ классификации эхо-сигнала гидролокатора по патенту РФ №2466419, содержащий излучение зондирующего сигнала, прием эхо-сигнала в смеси с шумовой помехой гидроакустической антенной, дискретизацию электрического сигнала, набор дискретизированных отсчетов электрического сигнала длительностью Т, полученных последовательно, через равные промежутки времени за все время обнаружения эхо-сигнала и проведение спектрального анализа полученных наборов дискретизированных отсчетов с использованием быстрого преобразования Фурье; сдвиг наборов дискретизированных отсчетов на 0.25Т, при котором по каждому набору определяют среднее значение всех спектральных отсчетов; по каждому набору определяют спектральный отсчет с наибольшей амплитудой, в каждом наборе сравнивают наибольшую амплитуду спектрального отсчета с порогом, выбранным по среднему значению, полученному при суммировании всех спектральных отсчетов всех наборов, в каждом наборе, имеющем спектральный отсчет, наибольшая амплитуда которого превысила порог, определяют ширину спектра эхо-сигнала как количество спектральных отсчетов, превысивших порог, в этих наборах запоминают наибольшую амплитуду спектрального отсчета, номер спектрального отсчета и ширину спектра, соответствующего наибольшему спектральному отсчету, сравнивают номера спектральных отсчетов в соседних последующих во времени наборах, сравнивают наибольшие амплитуды спектральных отсчетов в этих наборах, определяют набор с максимальной амплитудой спектрального отсчета; принимают решение в пользу эхо-сигнала от цели, если номера спектральных отсчетов с наибольшими амплитудами в пределах наборов соседних набору с максимальной амплитудой спектрального отсчета отличаются не более чем на ±2 отсчета, ширина спектра набора с максимальной амплитудой меньше, чем 2/Т, и наибольшие амплитуды спектральных отсчетов наборов соседних набору с максимальной амплитудой спектрального отсчета меньше максимальной амплитуды спектрального отсчета выбранного набора, а ширина спектра соседних наборов больше 2/Т; в противном случае принимается решение в пользу помехи.
Недостатком этого способа является то, что для определения спектральных классификационных признаков необходимо высокое разрешение сигнала по частоте, что возможно только при использовании длительных зондирующих сигналов при обнаружении объектов на больших дистанциях.
Так, при длительности 1000 мс разрешение по частоте составляет 1 Гц, что позволяет измерять спектральные признаки, а при длительности 100 мс разрешение по частоте 10 Гц, что ограничивает возможности использования спектральных признаков. Кроме того, при излучении длительных зондирующих сигналов имеет место реверберация, которая формирует зону по дальности, ограничивающую прием эхо-сигналов от близких объектов.
Задачей изобретения является обеспечение возможности классификации эхо-сигналов гидролокатором при увеличении дальности обнаружения путем использования зондирующих сигналов средней длительности, порядка нескольких десятков миллисекунд.
Техническим результатом от использования изобретения является повышение вероятности правильной классификации, обнаруженного эхо-сигнала от объекта по одному циклу излучения - прием при увеличении дальности обнаружения.
Указанный технический результат достигается тем, что в способ классификации эхо-сигнала гидролокатора, содержащий излучение зондирующего сигнала, прием эхо-сигнала в смеси с шумовой помехой гидроакустической антенной, дискретизацию электрического сигнала, набор дискретизированных отсчетов электрического сигнала длительностью Т, полученных последовательно через равные промежутки времени за все время обнаружения эхо-сигнала и проведение спектрального анализа полученных наборов дискретизированных отсчетов с использованием быстрого преобразования Фурье, сдвиг по времени наборов дискретизированных отсчетов, определение среднего значения всех спектральных отсчетов по каждому набору; определение спектрального отсчета с наибольшей амплитуды по каждому набору, сравнение в каждом наборе наибольшей амплитуды спектрального отсчета с порогом, выбранным по среднему значению, полученному при суммировании всех спектральных отсчетов всех наборов, введены новые признаки, а именно производится сдвиг по времени на величину m/, где m - коэффициент сдвига от 0,1 до 1, запоминают номер спектрального отсчета Ni, у которого на временном интервале обработки ti амплитуда эхо-сигнала Ai максимальна, определяют максимальную амплитуду эхо-сигнала Ai+1 на следующем временном интервале ti+1 и определяют номер этого спектрального отсчета Ni+1 и, если номера спектральных отсчетов совпадают Ni=Ni+1=N амплитуда спектрального отсчета Ai+1 временного интервала ti+1 больше, чем амплитуда спектрального отсчета Ai предыдущего интервала ti, то этот спектральный отсчет считается эхо-сигналом от объекта, а не помехой, и производят последовательное измерение амплитуд этого спектрального отсчета по последовательным временным интервалам, определяют максимальную амплитуду эхо-сигнала в измеренной последовательности, относительно максимальной амплитуды эхо-сигнала производят измерение длительности эхо-сигнала на уровне 0,3 от максимальной амплитуды на временном интервале рТ, где р - параметр, определяемый длиной предполагаемого объекта классификации, измеряют число локальных максимумов на измеренной длительности, определяют радиальную скорость объекта по номеру спектрального отсчета N и принимают решение о классе объекта по измеренным классификационным признакам: радиальной скорости, числу максимумов, протяженности, определяемой по длительности эхо-сигнала, и максимальной амплитуде эхо-сигнала.
Поясним достижение указанного результата.
Известно, что эхо-сигнал, отраженный от объекта, имеет огибающую колокольной формы, спектральную плотность такого радиоимпульса можно получить, используя преобразование Фурье, и эквивалентная ширина спектра колокольного радиоимпульса может быть определена по формуле (А.М. Тюрин. Введение в теорию статистических методов в гидроакустике. Л., 1963 г., изд. ВМОЛА, стр. 100)
 ,
,
где Τ - длительность зондирующего сигнала. Каждый зондирующий сигнал имеет свою функцию неопределенности, которая характеризует его протяженность по оси времени и по оси частот.
При использовании коротких зондирующих сигналов можно использовать временные классификационные признаки. Однако короткие сигналы имеют ограниченный энергетический потенциал по дальности обнаружения. Поэтому для увеличения дальности обнаружения используют зондирующие сигналы средней длительности порядка нескольких десятков миллисекунд. Эти сигналы имеют плохую разрешающую способность по частоте, поэтому использовать спектральные классификационные признаки нельзя, но можно получить оценку скорости. Обработка всех тональных сигналов производится с использованием определения энергетического спектра на основе цифровых методов с использованием БПФ. Поэтому сначала определяется спектр эхо-сигнала, а в дальнейшем после последовательного временного сдвига можно получить временную функцию эхо-сигнала. Таким образом, можно использовать для классификации спектральные особенности эхо-сигнала и временные особенности эхо-сигнала, что прототипом не предусмотрено.
Свойства функции неопределенности сигналов и аналитические соотношения между длительностью сигнала и шириной спектра сигнала достаточно подробно рассмотрены в научной литературе. (Д.Е. Вакман «Сложные сигналы и принцип неопределенности в радиолокации». М., 1965 г., Сов. радио, стр. 84, 111). Поскольку время появления эхо-сигнала неизвестно, то обработка эхо-сигнала производится со сдвигом во времени на величину mT, где m определяется необходимой погрешностью измерения дистанции. Решение о наличие эхо-сигнала от объекта принимается по максимуму амплитуды соседних наборов, в которые попал эхо-сигнал от объекта. Положение эхо-сигнала детерминировано по времени и по частоте согласно свойствам функции неопределенности. Если имеет место превышение порога на некоторой частоте, то на следующем временном интервале должно быть увеличение амплитуды спектрального отсчета для эхо-сигнала от объекта. Для помехи это событие случайное и при разнесении временных интервалов на величину m увеличение амплитуды спектрального отсчета не произойдет. Поэтому, запомнив номер спектрального отсчета, следует провести измерения всех амплитуд выбранного спектрального отсчета по всем последовательным временным интервалам pT, где p - коэффициент протяженности объекта классификации. Так, для точечного локального отражателя этот коэффициент равен 2, и число временных интервалов для измерения составит 2T/mT=2/m, что соответствует длительности функции неопределенности по оси времени для одиночного сигнала. Для протяженного объекта коэффициент p может быть существенно больше. Поскольку протяженность объекта заранее не известна, то необходимо проводить измерения амплитуд спектрального отсчета по всем поступающим временным оценкам спектра. Из всей выбранной совокупности амплитуд выбирается максимальная амплитуда, относительно которой производится измерение длительности по времени спектрального отсчета на уровне 0,3 А макс, которая определяет протяженность эхо-сигнала от объекта. На измеренной длительности может быть несколько локальных максимумов, количество которых характеризует количество отражателей объекта эхо-локации. Диапазон спектральных отсчетов определяется диапазоном скоростей движения объектов эхо-локации, поэтому номер спектрального отсчета будет характеризовать радиальную скорость объекта. Таким образом, по одной посылке может быть обнаружен эхо-сигнал на фоне помехи, измерена радиальная скорость объекта эхо-локации и измерены классификационные признаки, которые позволят классифицировать объект.
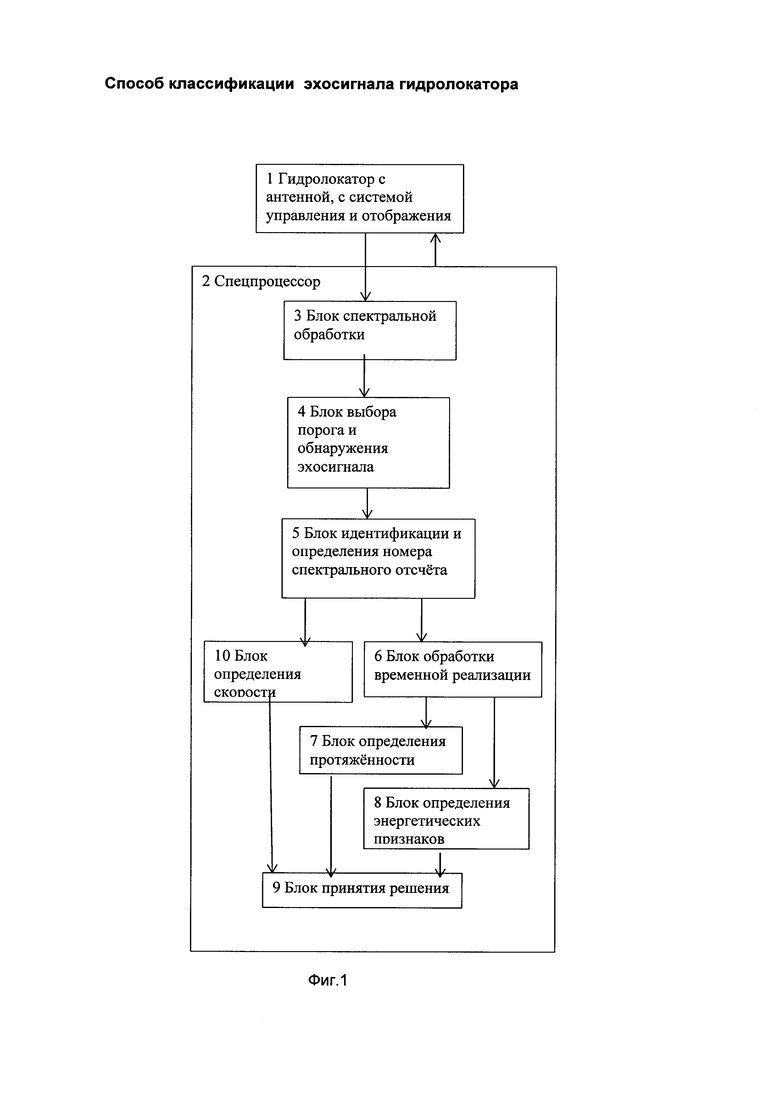
На фиг. 1 приведена блок-схема устройства, которое позволяет реализовать предлагаемый способ.
На фиг. 1 представлен гидролокатор 1 с системой управления и отображения, соединенный со спецпроцессором 2. В состав спецпроцессора входит последовательно соединенные блок 3 спектральной обработки, блок 4 выбора порога и обнаружения эхо-сигнала и блок 5 идентификации и обнаружения номера спектрального отсчета. Первый выход блока 5 через блок 10 определения радиальной скорости соединен с первым входом блока 9 принятия решения. Второй выход блока 5 через последовательно соединенные блок 6 обработки временной реализации и блок 7 определения протяженности соединен со вторым входом блока 9. Второй выход блока 6 через блок 8 определения энергетических признаков соединен с третьим входом блока 9 принятия решения, выход которого по системе внутренней связи спецпроцессора 2 соединен со входом гидролокатора 1
Гидролокатор 1 с системой управления и отображения является известным устройством см А.Н. Яковлев, Г.П. Каблов. «Гидролокаторы ближнего действия» Л., Судостроение, 1985. Спецпроцессор 2 является известным устройством, который нашел широкое применение при обработке гидроакустических сигналов различного назначения. В настоящее время практически вся гидроакустическая аппаратура выполняется на спецпроцессорах, которые преобразуют акустический сигнал в цифровой вид и производят в цифровом виде формирование характеристик направленности, многоканальную обработку и обнаружение сигнала, а также измерение амплитуды эхо-сигнала, номера отсчета и оценки параметров спектра (см. Ю.А. Корякин, С.А. Смирнов, Г.В. Яковлев. Корабельная гидроакустическая техника, Санкт-Петербург, «Наука», 2004 г., стр. 281). Вопросы спектральной обработки блока 3 достаточно подробно рассмотрены в книге «Применение цифровой обработки сигналов» п/р Оппенгейма М., Мир, 1980 г., где приведены алгоритмы использования процедур быстрого преобразования Фурье. Блок 4 выбора порога и обнаружения эхо-сигнала, блок 5 идентификации и обнаружения номера спектрального отсчета, блок 6 обработки временной реализации, блок 8 определения энергетических признаков, блок 10 измерения радиальной скорости могут быть реализованы с использованиям программ цифровой обработки с использованием вычислительные программы Матлаб, Матсард и др. (А.Б. Сергиенко Цифровая обработка сигналов СПб. «БХВ - Петербург», 2011 г.).
Реализация способа с помощью устройства фиг. 1 осуществляется следующим образом.
Гидролокатор, работая в своем стандартном режиме, излучает зондирующие сигналы, принимает эхо-сигналы и отображает принятую информацию на индикаторах системы отображения. Параллельно принятая выходная информация гидролокатора поступает на спецпроцессор 2, где переводится в цифровой вид и обрабатывается в блоке 3 с использованием известных процедур на базе БПФ. Выделенные в блоке 3 спектры последовательно во времени с интервалом mT поступают на блок 4, где производится определение порога и обнаружение спектральных отсчетов, превысивших порог, их амплитуды и номера спектральных отсчетов и номера временных интервалов. В блоке 5 производится идентификация обнаруженных отсчетов, выбор одноименных отсчетов в последовательных интервалах, выделение спектрального отсчета с возрастающей амплитудой и передача амплитуд выбранного спектрального отсчета во всех последовательных временных интервалах в блок 6, где производится селекция совокупности выбранных отсчетов для решения задач измерения классификационных признаков, которые производятся в блоке 8 определения энергетических признаков, в блоке 7 определения протяженности и в блоке 10 определения радиальной скорости. Измеренные классификационные признаки из блока 7, 8 и 10 поступают в блок принятия решения 9, где определяется класс обнаруженного объекта, который передается по внутренней системе передачи информации на систему отображения гидролокатора 1.
Таким образом, решена задача отделения эхо-сигнала от помехи, выделения классификационных признаков и принятие решения о классе объекта по одному циклу излучения - прием для зондирующих сигналов средней длительности, которая обеспечивает требуемую дальность обнаружения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КЛАССИФИКАЦИИ ЭХО-СИГНАЛА ГИДРОЛОКАТОРА | 2011 |
|
RU2466419C1 |
| Гидролокационный способ обнаружения объекта и измерения его параметров | 2017 |
|
RU2674552C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ ГИДРОЛОКАТОРА БЛИЖНЕГО ДЕЙСТВИЯ | 2016 |
|
RU2626295C1 |
| Способ классификации целей, адаптированный к гидроакустическим условиям | 2016 |
|
RU2624826C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ КЛАССИФИКАЦИИ | 2011 |
|
RU2461020C1 |
| Гидролокационный способ классификации подводных объектов в контролируемой акватории | 2017 |
|
RU2650419C1 |
| Способ отображения гидролокационной информации | 2019 |
|
RU2726312C1 |
| Гидроакустический способ определения параметров цели при использовании взрывного сигнала с беспроводной системой связи | 2018 |
|
RU2692841C1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ КЛАССИФИКАЦИИ ГИДРОЛОКАТОРА БЛИЖНЕГО ДЕЙСТВИЯ | 2011 |
|
RU2465618C1 |
| Способ отображения гидролокационной информации | 2019 |
|
RU2724245C1 |
Настоящее изобретение относится к области гидроакустики и может быть использовано для обнаружения и классификации эхосигналов от объектов, при применении зондирующих сигналов средней длительности. Использование предлагаемого способа позволяет обнаруживать и классифицировать объект по одному циклу излучения - приём. Способ классификации эхо-сигнала гидролокатора содержит излучение зондирующего сигнала, прием эхо-сигнала в смеси с шумовой помехой гидроакустической антенной спектрального анализа полученных наборов дискретизированных отсчетов с использованием быстрого преобразования Фурье; по каждому набору определяют среднее значение всех спектральных отсчётов; по каждому набору определяют спектральный отсчёт с наибольшей амплитудой, в каждом наборе сравнивают наибольшую амплитуду спектрального отсчета с порогом, выбранным по среднему значению, полученному при суммировании всех спектральных отсчётов всех наборов, в каждом наборе запоминают номер спектрального отсчёта и определяют наличие сигнала с использованием свойств функции неопределённости, производится последовательное измерение амплитуд этого спектрального отсчёта по последовательным временным интервалам, определяется максимальная амплитуда эхо-сигнала в измеренной последовательности, измеряют числа локальных максимумов на измеренной длительности, определяют радиальную скорость объекта по номеру спектрального отсчёта N и принимают решение о классе объекта по измеренным классификационным признакам радиальной скорости, протяжённости, числе максимумов, максимальной амплитуде эхо-сигнала. 1 ил.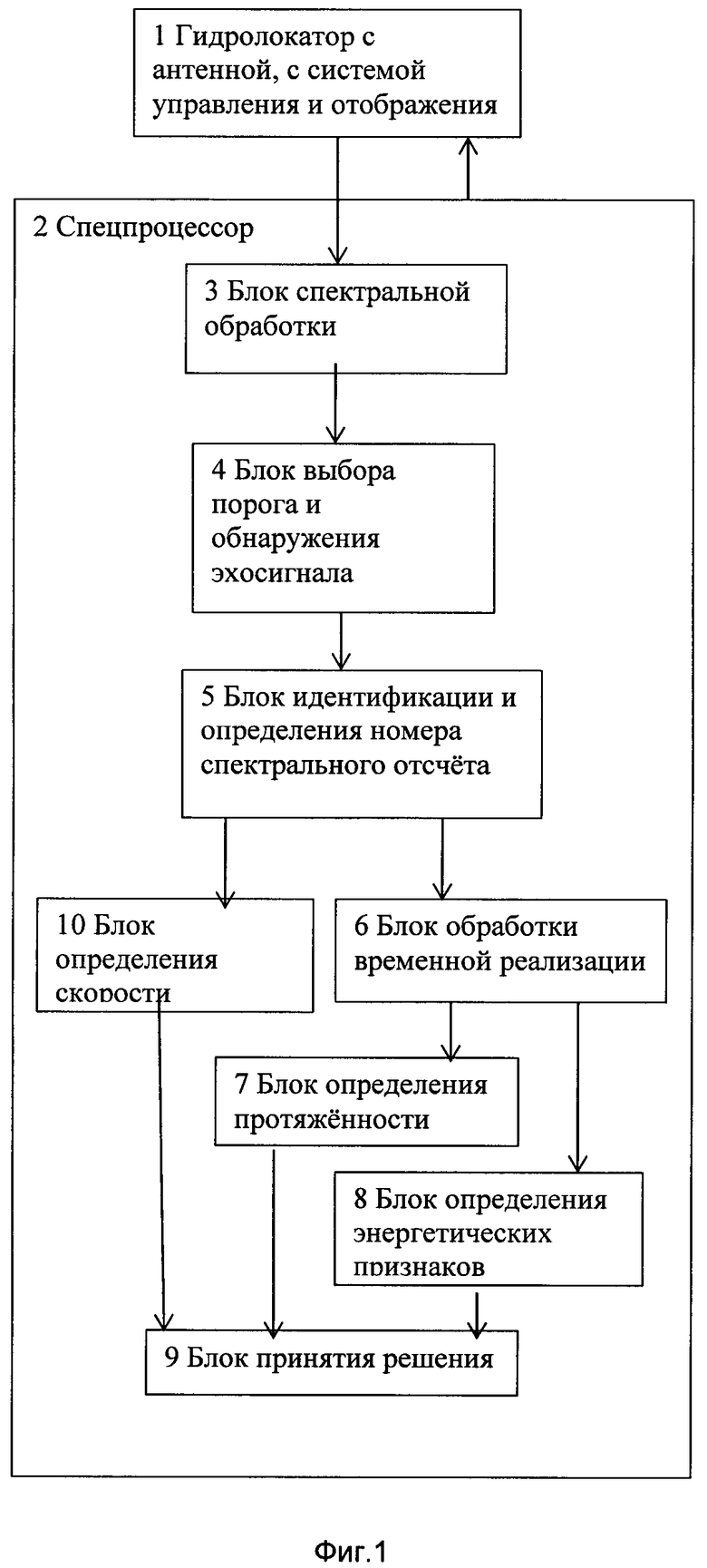
Способ классификации эхо-сигнала гидролокатора, содержащий излучение зондирующего сигнала, прием эхо-сигнала в смеси с шумовой помехой гидроакустической антенной, дискретизацию электрического сигнала, набор дискретизированных отсчетов электрического сигнала длительностью Т, полученных последовательно через равные промежутки времени за все время обнаружения эхо-сигнала, и проведение спектрального анализа полученных наборов дискретизированных отсчетов с использованием быстрого преобразования Фурье, сдвиг по времени наборов дискретизированных отсчетов, определение среднего значения всех спектральных отсчетов по каждому набору; определение спектрального отсчета с наибольшей амплитуды по каждому набору, сравнение в каждом наборе наибольшей амплитуды спектрального отсчета с порогом, выбранным по среднему значению, полученному при суммировании всех спектральных отсчетов всех наборов, отличающийся тем, что производится сдвиг по времени на величину mТ, где m - коэффициент сдвига от 0,1 до 1, запоминают номер спектрального отсчета Ni, у которого на временном интервале обработки ti амплитуда эхо-сигнала Ai максимальна, определяют максимальную амплитуду эхо-сигнала Аi+1 на следующем временном интервале ti+1 и определяют номер этого спектрального отсчета Ni+1 и, если номера спектральных отсчетов совпадают Ni=Ni+1=N и амплитуда спектрального отсчета Ai+1 временного интервала ti+1 больше, чем амплитуда спектрального отсчета Ai предыдущего интервала ti, то этот спектральный отсчет считается эхо-сигналом от объекта, а не помехой, и производят последовательное измерение амплитуд этого спектрального отсчета по последовательным временным интервалам, определяют максимальную амплитуду эхо-сигнала в измеренной последовательности, относительно максимальной амплитуды эхо-сигнала производят измерение длительности эхо-сигнала на уровне 0,3 от максимальной амплитуды на временном интервале рТ, где р - параметр, определяемый длиной предполагаемого объекта классификации, измеряют число локальных максимумов на измеренной длительности, определяют радиальную скорость объекта по номеру спектрального отсчета N и принимают решение о классе объекта по измеренным классификационным признакам: радиальной скорости, числу максимумов, протяженности, определяемой по длительности эхо-сигнала, и максимальной амплитуде эхо-сигнала.
| СИСТЕМА АВТОМАТИЧЕСКОЙ КЛАССИФИКАЦИИ ГИДРОЛОКАТОРА БЛИЖНЕГО ДЕЙСТВИЯ | 2013 |
|
RU2534731C1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ КЛАССИФИКАЦИИ ГИДРОЛОКАТОРА БЛИЖНЕГО ДЕЙСТВИЯ | 2011 |
|
RU2465618C1 |
| US 2011128820 A1, 02.06.2011 | |||
| US 2009257312 A1, 15.10.2009 | |||
| СПОСОБ АВТОМАТИЧЕСКОЙ КЛАССИФИКАЦИИ | 2011 |
|
RU2461020C1 |

