Изобретение относится к области авиационных средств прицеливания и позволяет выполнять сброс грузов с пространственного неустановившегося маневра.
Известен способ прицеливания при сбросе грузов в точку земной поверхности с маневрирующего летательного аппарата (ЛА), согласно которому в поле зрения летчика отображается линия прогнозируемых требуемых пеленгов (ЛПТП) объекта-цели, строящаяся в виде функции времени прогноза τ, изменяющегося от τ0=t до τК, в предположении того, что ЛА на этом интервале времени будет лететь с неизменным управлением U(τ)=const, равным управлению в данный текущий момент t, т.е. U(τ)=U(t), τ∈[t,τk]. Задача летчика при прицеливании способом «ЛПТП» состоит в совмещении объекта-цели с ЛПТП (с любой ее точкой) и фиксации наблюдаемого объекта-цели на этой линии. Если фиксация объекта-цели на ЛПТП осуществлена, то это означает, что при практически постоянном управлении U(t) ЛА выйдет в точку «точного» сброса груза, т.е. в точку, где фактический пеленг объекта-цели ϕц(t) равен требуемому пеленгу ϕmp(t) и сброшенный груз попадет в выбранный объект-цель. Точка ϕmp(t) представляет собой традиционную прицельную марку. Линия прогнозируемых требуемых пеленгов цели - ϕmp(τ) вычисляется по результатам интегрирования дифференциального уравнения динамики конечного состояния двухступенчатой динамической системы «ЛА - Груз». Каждая точка этой линии представляет собой геометрическое место точек прогнозируемых положений прицельной марки на прогнозируемом движении ЛА с учетом прогнозируемого положения цели, ветра и решения задачи баллистики сбрасываемого груза, определяемых на основе измеренных текущих значений фазовых координат ЛА, объекта-цели и ветра. В случае неподвижного объекта-цели и при безветрии ЛПТП совпадает с отображением, в общем случае, кривой «линии разрывов» (см. Моисеев А.Г., Айвазян С.А. «Интерактивные системы управления применением вертолета» статья в Сборнике трудов 3-го форума Российского Вертолетного Общества. - М., 24-25 марта 1998, с.VIII-37 - VIII-42).
Данный способ из-за ограничения поля зрения коллиматорного авиационного индикатора (КАИ), на котором отображается ЛПТП, не позволяет выполнять прицельную доставку грузов с произвольных криволинейных траекторий, так как метод «ЛПТП» требует визуального (через КАИ) контакта с целью и линией «разрывов» - ЛПТП в течение всего процесса выведения летательного аппарата на цель.
Технический результат, достигаемый изобретением, заключается в расширении возможностей для маневрирования при доставке грузов с криволинейных траекторий.
Указанный результат достигается путем измерения текущего значения геометрической высоты относительно точки земной поверхности. Причем эта точка (наземная цель) не обязательно должна быть наблюдаемой. Сигналы координат цели могут быть получены различными способами, например, при доставке груза в оперативно обнаруженную цель: формированием визуального изображения участка поверхности с расположенной на нем целью, формированием изображения подвижной марки и совмещением его с изображением цели с запоминанием сигналов координат цели в момент совмещения. При доставке груза в заранее обнаруженную цель возможен также другой способ: ввод координат цели во время предполетной подготовки. Кроме того, измеряют текущие значения фазовых координат ЛА, цели и ветра, решают задачу баллистики сбрасываемого груза и решают задачу прогнозирования фазовых координат движения маневрирующего летательного аппарата.
Затем формируют сигнал координат поверхности точек сбрасывания, обеспечивающих попадание в цель. После этого определяют плоскость маневра и формируют сигналы координат траектории выведения самолета из текущего положения на поверхность точек сбрасывания. Для полета по траектории выведения формируют директорные сигналы заданных и текущих значений перегрузки и крена, а также временной интервал до сброса. Одновременно выделяют сигнал рассогласования между положениями прогнозируемой и заданной точкой сброса, корректируют сигналы координат поверхности точек сбрасывания и траектории выведения сигналом рассогласования до заданной величины. При сближении с целью после достижения директорными сигналами заданных значений перегрузки, крена или времени, оставшегося до сбрасывания, управляют наведением летательного аппарата, совмещая директорные сигналы заданной и текущей перегрузки, а также заданного и текущего крена.
Сущность предлагаемого способа поясняется чертежами.
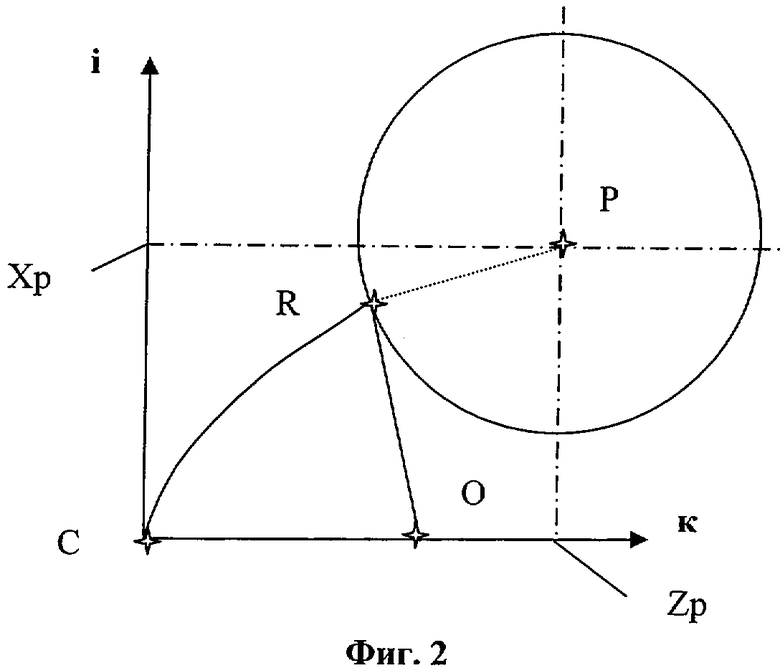
На фиг.1 показаны семейство баллистических траекторий груза и соответствующая ему поверхность точек сбрасывания, а также траектория выведения летательного аппарата.
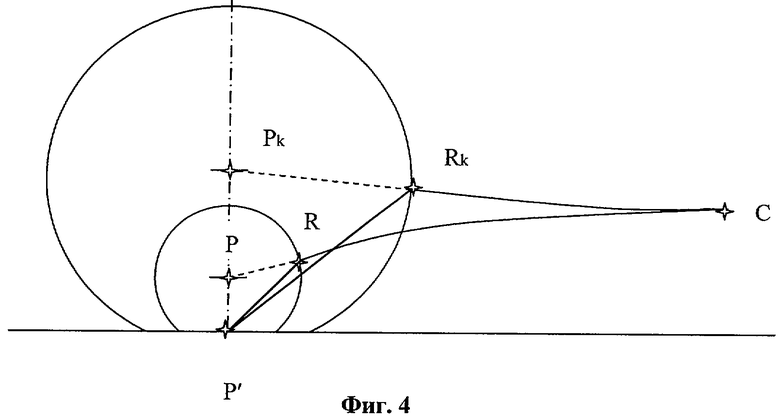
На фиг.2 даны геометрические построения траектории выведения в плоскости маневра.
На фиг.3 показана схема коррекции координат точек сбрасывания и траектории выведения по сигналу рассогласования в виде разности прогнозируемой минимальной высоты и безопасной высоты сбрасывания груза.
На фиг.4 показана схема коррекции координат точек сбрасывания и траектории выведения по сигналу рассогласования в виде разности между прогнозируемой и заданной дальностью сбрасывания груза.
В соответствии с предлагаемым способом прицеливание и сбрасывание груза выполняется следующим образом.
При наземной подготовке или в полете запоминают координаты цели. В процессе полета измеряют текущие значения фазовых координат ЛА, цели и ветра, решают задачу баллистики сбрасываемого груза. На основе измерений и запомненных координат цели формируют сигнал координат поверхности точек сбрасывания, обеспечивающих попадание в цель. Построение поверхности точек сбрасывания иллюстрирует фиг.1, где изображено:
С - текущее положение летательного аппарата;
Р - центр поверхности точек сбрасывания;
R - точка сбрасывания;
Р' - точка падения груза, сброшенного в точке R;
РР' - вектор понижения, определяемый из условия, что вектор начальной скорости груза в точке R направлен в точку Р.
При фиксированных точках Р, Р' и скорости груза V имеем семейство баллистических траекторий и соответствующую ему поверхность точек сбрасывания, показанную на фиг.1. В пустоте эта поверхность представляет собой сферу с центром в точке Р радиуса
Rp=V×T=V×√(2×Hp/g),
где Т - время падения груза, Нр - высота точки Р, g - ускорение свободного падения. В атмосфере поверхность точек сбрасывания искажается в зависимости от баллистических параметров груза. Однако проведенные исследования показали, что даже для грузов с тормозными устройствами в качестве первого приближения при расчете траекторий выведения летательного аппарата можно принять сферу, радиус которой равен штилевому относу при сбрасывании груза с горизонтального полета на высоте Нр.
После получения сигнала координат поверхности точек сбрасывания формируют траекторию выведения летательного аппарата из текущего положения С в точку R. Это может быть реализовано, например, следующим образом.
Положение вектора скорости V и точки Р определяют единственную содержащую их плоскость маневра, пересечение которой со сферой дает окружность радиуса Rp. Введем маневренную систему координат (далее по тексту МСК), ось Х которой направлена по вектору скорости V, ось Y нормальна плоскости маневра, а ось Z образует с Х и Y правую тройку. Будем искать траекторию выведения в виде дуги окружности в плоскости маневра, как показано на фиг.2. Тогда из геометрических соотношений можно найти радиус виража:
Ro=(Хр2+Zp2-Rp2)/2/Zp,
где Хр и Zp - координаты точки Р в МСК.
Координаты точки сбрасывания XR и ZR в МСК определяются из соотношений:
XR 2+(Ro-ZR)2=Ro2,
(Хр-ХR)2+(Zp-ZR)2=Ro2.
Согласно предлагаемому способу для полета по траектории выведения на КАИ индицируют директорные сигналы текущих значений перегрузки и крена, а также времени, оставшегося до сбрасывания, величины которых однозначно определяются траекторией выведения и скоростью полета.
В процессе выведения в точку сбрасывания формируют корректирующий сигнал. Для обеспечения максимальной точности доставки груза необходимо сбрасывать его с минимальной дальности, тем не менее достаточной для увода от столкновения с землей или осколками. В данном случае, продолжая траекторию выведения, прогнозируют траекторию выхода из маневра после сбрасывания. При этом может использоваться, например, гипотеза о полете с максимально допустимой перегрузкой или же гипотеза о переходе в горизонтальный полет к моменту падения груза. В последнем случае на основе спрогнозированной траектории определяют минимальную высоту Нпр, достигаемую при выходе из маневра, по формуле:
Нпр=К×V×TR×SinλR+HR,
где К - эмпирический коэффициент, определяющий параметры выполняемого маневра, имеющий различный диапазон значений для каждого конкретного летательного аппарата, выбираемый по результатам испытательных полетов летательного аппарата в различных условиях применения,
V - скорость летательного аппарата,
TR - время падения груза, брошенного в точке R,
λR - угол бросания,
HR - высота точки R.
Далее выделяют корректирующий сигнал рассогласования между Нпр и Hk - безопасной высотой сбрасывания, определяемой радиусом разлета осколков разрушающегося груза. Затем корректируют положение точки Р, а следовательно, и координаты поверхности точек сбрасывания, траектории выведения и увода. Коррекцию продолжают до тех пор, пока рассогласование Нпр-Нк не уменьшится до заданной пренебрежимо малой величины.
Сказанное поясняет фиг.3, где изображены точки R, Р после первого приближения и точки Rk, Pk после k итераций. Введенный таким образом итерационный цикл обеспечивает сбрасывание с минимальной дальности, а значит, с максимальной точностью.
Для обеспечения сбрасывания груза с большой дальности, не входя в зону, прилегающую к цели, продолжая траекторию выведения, прогнозируют дальность сбрасывания и выделяют сигнал рассогласования между прогнозируемой RP' и заданной RkP' дальностями, как показано на фиг.4. Затем корректируют положение центра, а, следовательно, и сигналы координат поверхности точек сбрасывания. Коррекцию продолжают до тех пор, пока рассогласование не уменьшится до заданной пренебрежимо малой величины.
На фиг.4 обозначено:
С - текущее положение самолета;
Р - начальная итерация положения центра поверхности точек сбрасывания;
Pk - положение центра поверхности точек сбрасывания после k итераций;
Р' - точка падения груза;
R - начальная итерация положения точки сбрасывания;
Rk - положение точки сбрасывания после k итераций;
CR - начальная итерация траектории выведения в точку сбрасывания;
CRk -траектория выведения в точку сбрасывания после k итераций;
RP' - начальная итерация дальности сбрасывания;
RkP' - дальность сбрасывания после k итераций;
В соответствии с предлагаемым способом маневр выполняется следующим образом.
Выполнив привязку к оперативно обнаруженной цели или сразу по включении режима при заходе на заранее обнаруженную цель, летчик наблюдает на прицельном индикаторе директорные сигналы заданных значений крена и перегрузки, а также времени, оставшегося до сброса. Контролируя эти сигналы в ходе пилотирования, летчик в любой момент может перейти на траекторию выведения, а может продолжать сближение по своему усмотрению. Например, для скрытного захода на цель летчик выполняет уход на малую высоту и, чтобы сохранить элемент неожиданности, продолжает полет с ненулевым боковым пеленгом на цель, следуя рельефу местности. Выдерживание бокового пеленга приводит к тому, что по мере сближения цель оказывается дальше по борту самолета, а это вызывает рост директорных сигналов заданных крена и перегрузки. Когда заданная перегрузка достигнет желаемого порогового значения, летчик начинает вираж, следуя директорным сигналам.
При сближении с целью сигнал заданной перегрузки может так и не достигнуть порогового значения. Это имеет место при полете с малым боковым пеленгом на цель. В этом случае о начале маневра летчик судит по директорнуму сигналу времени, оставшегося до сброса, величина которого однозначно определяется длиной дуги CR и скоростью полета. Когда время, оставшееся до сброса, достигнет порогового значения, летчик начинает вираж, следуя директорным сигналам крена и перегрузки.
Использование предлагаемого способа не требует визуального контакта с целью в течение всего маневра. Значит, размеры поля обзора КАИ не ограничивают маневрирование при прицеливании. Причем параметры маневра (его интенсивность, углы наклона траектории и крена) не задаются жестко, а оперативно выбираются летчиком в зависимости от его подготовленности и окружающей обстановки.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРИЦЕЛИВАНИЯ С МАНЕВРИРУЮЩЕГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2453793C2 |
| Способ прицеливания при сбросе грузов в точку земной поверхности с маневрирующего летательного аппарата | 2018 |
|
RU2695591C1 |
| СПОСОБ ИНДИКАЦИИ ТЕКУЩЕЙ И ПРОГНОСТИЧЕСКОЙ ИНФОРМАЦИИ В ПРОЦЕССЕ ВОЗДУШНОЙ ДОЗАПРАВКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2017 |
|
RU2676594C2 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ ПОПАДАНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА В ВИХРЕВОЙ СЛЕД САМОЛЕТА-ГЕНЕРАТОРА ВИХРЕЙ | 2018 |
|
RU2695249C1 |
| СПОСОБ ВЫПОЛНЕНИЯ СНИЖЕНИЯ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2002 |
|
RU2280888C2 |
| Способ интегрального отображения параметров полётной ситуации | 2019 |
|
RU2722888C1 |
| СИСТЕМА ОТОБРАЖЕНИЯ ПИЛОТАЖНОЙ ИНФОРМАЦИИ ПРИ ПОСАДКЕ ЛЕТАТЕЛЬНОГО АППАРАТА | 1992 |
|
RU2046059C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2004 |
|
RU2267747C1 |
| СПОСОБ МОДЕЛИРОВАНИЯ НА ПИЛОТАЖНОМ СТЕНДЕ ПОПАДАНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА В ВИХРЕВОЙ СЛЕД | 2018 |
|
RU2701062C1 |
| Командно-пилотажный индикатор вертолета | 2021 |
|
RU2778955C1 |

Изобретение относится к способам прицеливания при сбросе грузов с летательного аппарата. Сущность изобретения заключается в том, что измеряют текущие значения фазовых координат летательного аппарата, цели и ветра, решают задачу баллистики сбрасываемого груза, решают задачу прогнозирования фазовых координат движения маневрирующего летательного аппарата, формируют сигнал координат поверхности точек сбрасывания, обеспечивающий попадание в цель, определяют плоскость маневра и формируют сигнал координат траектории выведения летательного аппарата из текущего положения на поверхность точек сбрасывания. Формируют директорные сигналы текущих перегрузки и крена и заданных перегрузки и крена, необходимых для полета по траектории выведения. Формируют временной интервал до сброса, выделяют сигнал рассогласования между положениями прогнозируемой и заданной точек сброса, корректируют сигналы координат поверхности точек сбрасывания, траектории выведения и увода сигналом рассогласования до заданной величины. По достижении директорными сигналами заданных перегрузки, крена или времени, оставшегося до сброса, управляют наведением летательного аппарата, совмещая директорные сигналы заданной и текущей перегрузки и заданного и текущего крена. При этом сигнал рассогласования формируют в виде разности между прогнозируемой минимальной высотой и безопасной высотой сбрасывания груза, а сигнал рассогласования формируют в виде разности между прогнозируемой и заданной дальностью сбрасывания груза. Реализация изобретения обеспечивает расширение возможностей для маневрирования при доставке грузов с криволинейных траекторий. 2 з.п. ф-лы, 4 ил.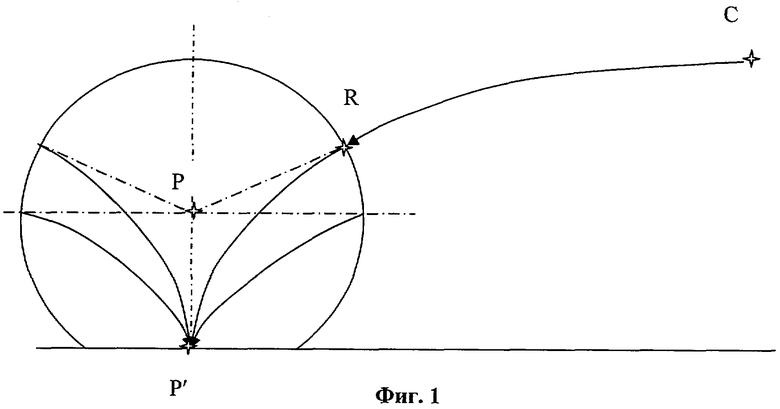
| СПОСОБ ПРИЦЕЛИВАНИЯ ПРИ СБРОСЕ ГРУЗОВ В НАБЛЮДАЕМУЮ ТОЧКУ ЗЕМНОЙ ПОВЕРХНОСТИ С МАНЕВРИРУЮЩЕГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2001 |
|
RU2199074C1 |
| ОПТИКОЭЛЕКТРОННАЯ ПРИЦЕЛЬНАЯ СИСТЕМА САМОЛЕТА | 1999 |
|
RU2158406C1 |
| ДИНАМОМЕТР КИСТЕВОЙ ТЕНЗОМЕТРИЧЕСКИЙ | 1996 |
|
RU2118508C1 |
| US 4086841 A, 02.05.1978 | |||
| ЭФРОС И.Е | |||
| Основы устройства прицелов для бомбометания | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| - М., Военное издательство, 1947, с.5-11. | |||

