Область техники.
Изобретение относится к области авиации, более конкретно к приборному оборудованию, и может быть использовано в приборном оборудовании летательного аппарата для упрощения восприятия и переработки приборной информации летчиком, выполнения захода на посадку, посадки и полета по маршруту в ручном и автоматическом режимах управления для повышения регулярности полетов, безопасности полета и посадки самолетов, особенно в условиях полета по приборам.
Уровень техники.
Известно, что наиболее сложным этапом полета является заход, расчет на посадку и собственно посадка самолета. Задача выполнения снижения по заданной траектории при заходе на посадку и посадки по приборам оказывается настолько сложной, что летчик с ней не справляется, в то время как многие самолеты уже оборудованы автопилотами, способными производить автоматическую посадку. С другой стороны, грамотный летчик может выполнить визуальный полет от взлета до посадки на любом самолете, имея лишь указатель скорости или указатель угла атаки.
(«Большие скорости полета и требуемая высокая точность выполнения траекторного движения самолета при решении ряда тактических и навигационных задач возможны только при использовании средств автоматического и директорного управления. Прежде всего вся сложность самолетовождения по заданной траектории в условиях больших скоростей полета вызвана необходимостью восприятия летчиком множества параметров движения самолета, их контроля и принятия логического решения для выработки действий органами управления. В ряде ответственных режимов полета, таких, например, как заход на посадку в сложных метеорологических условиях, при ограниченности времени на принятие решений может произойти изменение заданной траектории полета, потеря координации управления, что нередко приводит к летным происшествиям». [Михалев И.А., Окоемов Б.Н., Павлина И.Г., Чикулаев М.С., Киселев Ю.Ф. «Системы автоматического и директорного управления самолетом». М., «Машиностроение», 1974. Стр.3]).
Эти факты свидетельствуют о том, что самая точная и достоверная информация о параметрах полета, представляемая летчику, настолько для него оказывается сложной, что он не справляется с пилотированием самолета. А автопилот справляется. Тогда возникает неразрешимый вопрос об ответственности за исход полета: как летчик может контролировать автопилот, который летает лучше контролера? Да и не все самолеты оборудованы сложными и дорогими автопилотами с автоматами тяги, необходимыми для выполнения автоматических посадок.
На современных самолетах и вертолетах широкое распространение получили системы директорного управления. Способ директорного управления заключается в следующем.
«При работе с директорией системой действия летчика сводятся к непрерывному устранению рассогласования между заданными и текущими значениями координаты управления, к обеспечению δ=0, т.е. ZT=Zзад. При этом слежение координаты ZT за координатой Zзад может быть осуществлено двумя методами:
- слежение с преследованием, когда летчик воспринимает как ход изменения координаты Zзад, так и координаты ZT.
- слежение компенсирующее; в этом случае летчик воспринимает только рассогласование между сигналами, т.е. сигнал δ=Δz.
Точность слежения с преследованием в 1,5-2,0 раза выше, чем компенсирующего (летчик имеет больше информации о процессе слежения), тем не менее, если входы в систему относятся к ультранизкочастотному диапазону (f=0÷6 Гц), регулирование методом компенсации предпочтительней. Так как максимальная собственная частота движений самолета не превышает f≤1,5 Гц, то командный прибор следует строить как прибор компенсационного слежения (регулирования). Задача летчика в этом случае сводится к удерживанию командной стрелки в центре прибора с помощью перемещения рычагов управления так, чтобы скомпенсировать действие факторов, вызывающих ее отклонение от центра. Так как управление самолетом происходит по двум координатам - zзад и zбок, то командный прибор имеет две командные стрелки - горизонтальную для Δzпрод и вертикальную для Δzбок, образующие перекрестье в центре неподвижной шкалы» [Михалев И.А., Окоемов Б.Н., Павлина И.Г., Чикулаев М.С., Киселев Ю.Ф. «Системы автоматического и директорного управления самолетом». М., «Машиностроение», 1974. Стр. 99].
На современных самолетах и вертолетах широко используется электронные (жидкокристаллические) индикаторы, на которых обеспечивается формирование и индикация сигналов изображения ВПП, сигналов отклонения от зон курса и глиссады, директорных сигналов управления самолетом (вертолетом) по крену и тангажу. Однако даже самые современные системы индикации и директорные сигналы, как способ управления, не позволяют выполнять регулярные полеты при метеоусловиях хуже I категории ICAO (60 м нижний край облачности и ˜800 м видимость на ВПП.ICAO - Международная Организация Гражданской Авиации). Для выравнивания и посадки директорные стрелки не используются, поскольку летчик не справляется с управлением по этим стрелкам задолго до достижения высоты начала выравнивания.
Для выполнения автоматических и директорных заходов на посадку на командно-пилотажном приборе, кроме директорных планок, размещают планки положения или совмещенный индекс отклонения от зон курса и глиссады («чемодан»). Планки положения обычно дублируются на навигационно-пилотажном приборе. Директорные планки никак не связаны с углами крена и тангажа. Известны случаи, когда летчики не замечали отказов авиагоризонта при директорном управлении. Поэтому существующие директорные стрелки можно разместить на любом другом отдельном приборе (на НПП, например) без потери качества управления.
Известен «1. Способ выполнения снижения при заходе на посадку, включающий измерение и индикацию параметров полета: высоты, истинной скорости, курса, путевой скорости, угла сноса, дальности до взлетно-посадочной полосы (ВПП), бокового уклонения от оси ВПП, а также формирование и индикацию сигналов изображения ВПП со схемой захода на посадку, проекции прогнозируемой траектории полета на горизонтальную плоскость, выбор схемы (траектории) захода на посадку, полет по выбранной схеме (траектории) к 4-ому развороту, 4-й разворот, снижение по заданной глиссаде, отличающийся тем, что при заходе на посадку определяют глиссадную дальность, соответствующую дальности полета самолета при следовании по заданной глиссаде с текущей высоты, в соответствии с глиссадной дальностью на выбранной траектории захода на посадку формируют и индицируют метку глиссадной дальности, по достижении меткой глиссадной дальности торца ВПП начинают снижение, управляя вертикальной скоростью снижения самолета таким образом, чтобы удерживать метку глиссадной дальности на изображении торца ВПП.
2. Способ выполнения снижения при заходе на посадку, включающий измерение и индикацию параметров полета: высоты, истинной скорости, курса, путевой скорости, угла сноса, дальности до взлетно-посадочной полосы (ВПП), бокового уклонения от оси ВПП, а также формирование и индикацию сигналов изображения ВПП со схемой захода на посадку, проекции прогнозируемой траектории полета на горизонтальную плоскость, выбор схемы (траектории) захода на посадку, полет по выбранной схеме (траектории) к 4-ому развороту, 4-й разворот, снижение по заданной глиссаде, отличающийся тем, что при заходе на посадку определяют глиссадную дальность, соответствующую дальности полета самолета при следовании по заданной глиссаде с текущей высоты, определяют развернутую дальность, соответствующую дальности полета по выбранной траектории полета до ВПП, сравнивают ее с глиссадной дальностью и формируют сигнал рассогласования, который преобразуют в автопилоте (САУ) в управляющий сигнал в соответствии с заложенным в САУ (автопилот) законом управления и подают его как на директорную стрелку тангажа пилотажного прибора, так и на исполнительные механизмы, управляющие рулем высоты самолета.
3. Способ осуществления захода на посадку по п.1, отличающийся тем, что метку глиссадной дальности формируют и индицируют на прогнозируемой траектории полета, а саму прогнозируемую траекторию полета (проекцию на гор. плоскость) формируют и индицируют в виде масштабных меток высоты и дальности, представляющих положение самолета через расстояния, пропорциональные заданному углу наклона глиссады снижения и изменению высоты полета на равные промежутки  в виде пунктирной линии, масштабные метки через каждые 10 равных промежутков высоты индицируют дополнительно поперечными черточками, по количеству указанных масштабных меток судят как о высоте полета, так и о дальности до ВПП, а на малых высотах продолжают формирование и индикацию прогнозируемой траектории полета за пределами метки глиссадной дальности, но без масштабных меток высоты и дальности (в виде сплошной линии) так, чтобы общая дальность «прогноза» была не менее 6-7 км».
в виде пунктирной линии, масштабные метки через каждые 10 равных промежутков высоты индицируют дополнительно поперечными черточками, по количеству указанных масштабных меток судят как о высоте полета, так и о дальности до ВПП, а на малых высотах продолжают формирование и индикацию прогнозируемой траектории полета за пределами метки глиссадной дальности, но без масштабных меток высоты и дальности (в виде сплошной линии) так, чтобы общая дальность «прогноза» была не менее 6-7 км».
Указанное изобретение позволяет создать наглядную для летчика информацию об отклонении от заданной глиссады снижения, однако не позволяет с такой же простотой управлять самолетом в боковом канале при полете по прямой (при снижении по глиссаде, при полете по маршруту), не дает представления о высоте начала выравнивания на посадке.
Таким образом, задача создания удобного для летчика способа управления самолетом и системы индикации при заходе на посадку и посадке остается актуальной.
Сущность изобретения.
Задачей изобретения является создание такого способа управления самолетом, который обеспечивал бы упрощение восприятия и переработки приборной информации летчиком, выполнение захода, расчета, посадки и полета по маршруту в ручном и автоматическом режимах управления для повышения регулярности полетов, безопасности полета и посадки самолетов, особенно в условиях полета по приборам.
Поставленная задача достигается тем, что в способе управления самолетом при заходе на посадку и посадке, включающем снижение по заданной глиссаде, выравнивание и посадку, измерение и индикацию параметров полета: высоты, скорости, путевого угла, дальности до взлетно-посадочной полосы (ВПП), бокового уклонения от оси ВПП, а также формирование и индикацию изображения ВПП (метки заданного путевого угла - ЗПУ), метки глиссадной дальности, сигнал бокового уклонения от оси ВПП (поз.3 на фиг.1) формируют на выбранной дальности (на постоянной дальности от самолета до метки или на постоянной дальности метки от торца ВПП) с обратным знаком (поз.5 на фиг.1) и выбранным масштабным коэффициентом (kZ≈2÷4), индицируют его в виде метки обратного бокового уклонения (поз.3 на фиг.5, 6), показывающей боковое уклонение от оси ВПП (от ЗПУ) с обратным знаком, в процессе выхода на линию заданного пути (ЛЗП) удерживают метку обратного бокового уклонения между изображениями ВПП (поз.1 на фиг.5) (или метки ЗПУ) и вектора скорости (поз.2 на фиг.5), при полете по ЛЗП (при полете по маршруту, снижении по глиссаде, на пробеге и разбеге) удерживают метку вектора скорости на метке обратного бокового уклонения (фиг.6), при автоматическом управлении угол между вектором скорости и направлением на метку обратного бокового уклонения используют в качестве сигнала рассогласования, который обнуляется автопилотом.
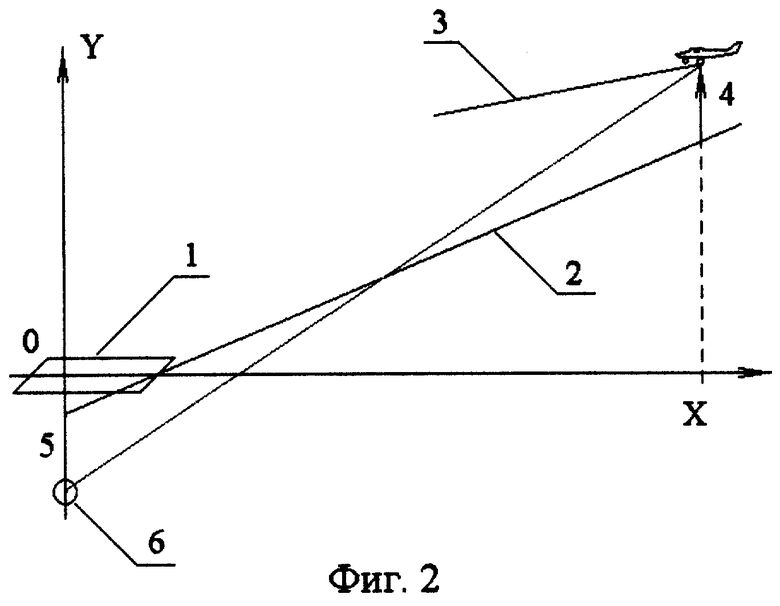
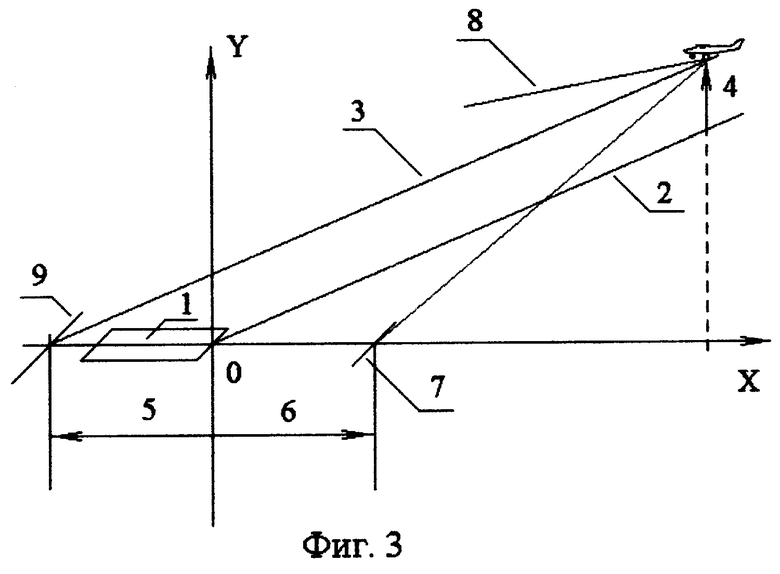
При снижении по глиссаде (при стабилизации высоты) формируют отклонение от глиссады по высоте (или по дальности - поз.4 на фиг.2) и на выбранной дальности формируют отклонение от глиссады с обратным знаком (поз.5 на фиг.2) и выбранным масштабным коэффициентом (kH≈1÷3), индицируют его на боковом уклонении от оси ВПП, определяемом меткой обратного бокового уклонения в виде тангажно-глиссадной метки (поз.5 на фиг.1), показывающей отклонение от заданной глиссады (от заданной высоты) относительно шкалы тангажа. Известную метку глиссадной дальности индицируют на боковом отклонении от оси ВПП, определяемом меткой обратного бокового уклонения, при подходе к глиссаде снижения удерживают тангажно-глиссадную метку между вектором скорости и меткой глиссадной дальности (меткой заданного тангажа), при снижении по глиссаде удерживают метку вектора скорости самолета на тангажно-глиссадной метке. При автоматическом управлении угол между вектором скорости (поз.3 на фиг.2 или поз.8 на фиг.3) и направлением на тангажно-глиссадную метку (поз.6 на фиг.2 или поз.7 на фиг.3) используют в качестве сигнала рассогласования, который обнуляется автопилотом.
При снижении по глиссаде формируют также сигнал выравнивания, определяемый программой изменения угла тангажа (угла наклона траектории) в зависимости от высоты и скорости полета, индицируют его в виде метки выравнивания, при подходе этой метки к метке вектора скорости (продольной оси самолета) удерживают метку вектора скорости (продольной оси самолета) на метке выравнивания до приземления, при автоматическом управлении сигнал рассогласования между заданным углом тангажа, ϑВЫР (направлением на метку выравнивания - поз.3 на фиг.4) и текущим углом тангажа (направлением на метку вектора скорости - поз.5 на фиг.4) используют в качестве сигнала рассогласования, который обнуляется автопилотом. Кроме того, метку выравнивания формируют и индицируют пропорционально сигналу бокового уклонения с обратным знаком и выбранным масштабным коэффициентом и используют ее для контроля следования по посадочному курсу.
При отклонении фактической траектории полета от заданной формируют разовые команды, которые индицируют на экране и подают в наушники летчика.
Такой способ управления самолетом (и система индикации) при выполнении снижения по заданной траектории при заходе на посадку и посадки обеспечивается минимальным количеством меток, не требует точного слежения за метками при выходе на посадочный курс и глиссаду, безинерционное упреждающее движение метки выравнивания показывает нужный темп выравнивания заранее, что упрощает восприятие и переработку приборной информации летчиком, обеспечивая тем самым повышение безопасности полета и посадки самолетов, особенно в условиях полета по приборам.
Перечень фигур на чертежах.
Изобретение поясняется чертежами, на которых:
Фиг.1 показывает в соответствии с изобретением схему формирования метки обратного бокового уклонения.
Фиг.2 показывает в соответствии с изобретением схему формирования тангажно-глиссадной метки по обратному отклонению от глиссады по высоте.
Фиг.3 показывает в соответствии с изобретением схему формирования тангажно-глиссадной метки по обратному отклонению от глиссады по дальности.
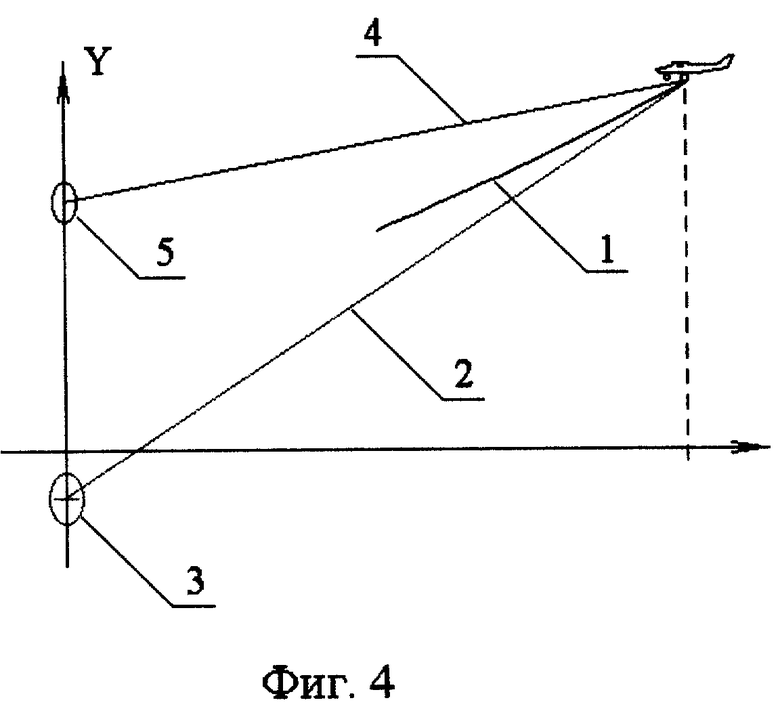
Фиг.4 показывает в соответствии с изобретением схему формирования метки выравнивания.
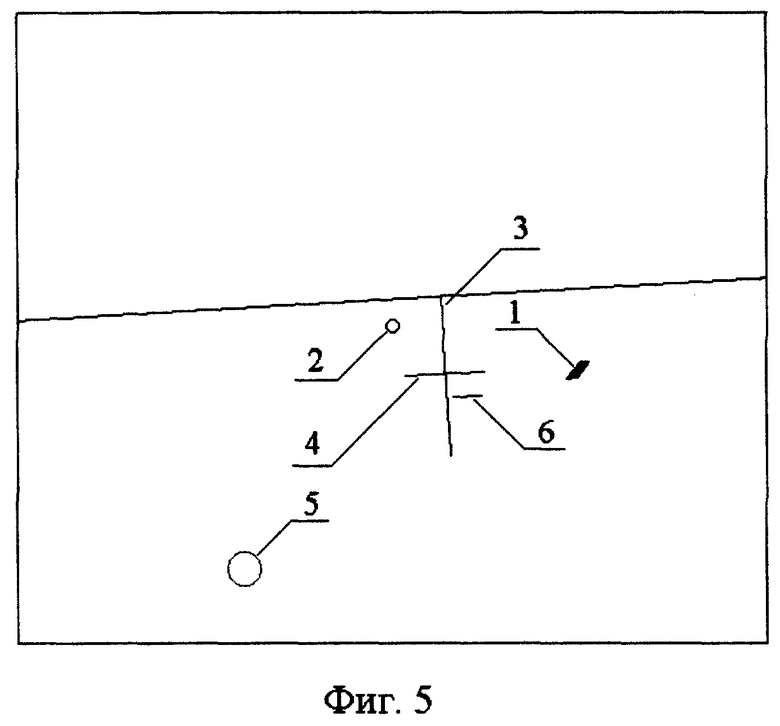
Фиг.5 показывает в соответствии с изобретением положение меток и индексов на экране при выходе на посадочный курс и глиссаду снижения. Самолет находится правее оси ВПП и ниже глиссады, выше заданной траектории выравнивания.
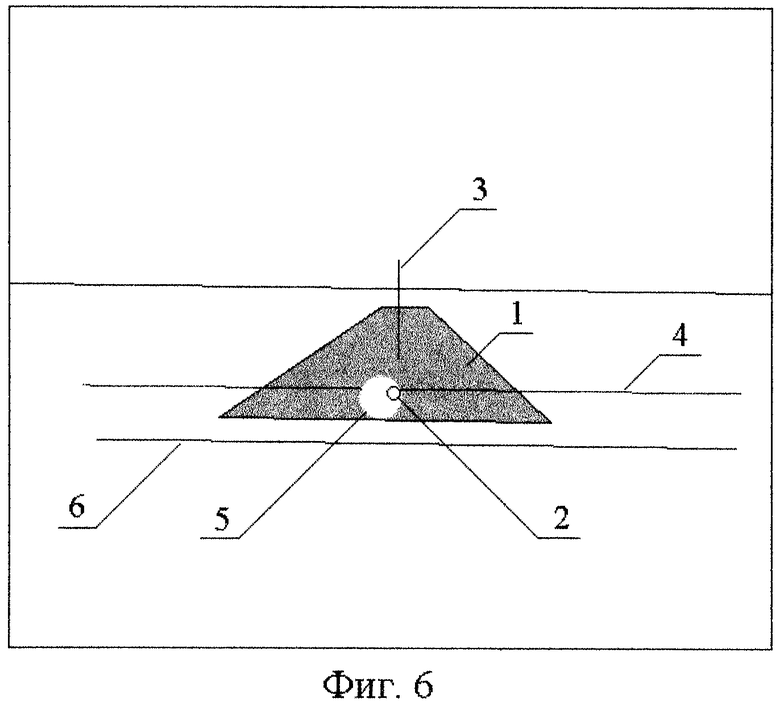
Фиг.6 показывает в соответствии с изобретением положение меток и индексов на экране при выравнивании.
На фиг.1 обозначено:
1 - Продольная ось летательного аппарата.
2 - Вектор скорости.
3 - Боковое уклонение от оси ВПП.
4 - Обратное боковое уклонение от оси ВПП.
5 - Метка обратного бокового уклонения.
6 - ВПП.
На фиг.2 обозначено:
1. ВПП.
2. Заданная глиссада снижения.
3. Вектор скорости.
4. Отклонение от глиссады по высоте.
5. Обратное отклонение от глиссады по высоте.
6. Тангажно-глиссадная метка.
На фиг.3 обозначено:
1. ВПП.
2. Заданная глиссада снижения.
3. Фактическая глиссада снижения.
4. Отклонение от глиссады по высоте.
5. Отклонение от глиссады по дальности.
6. Обратное отклонение от глиссады по дальности.
7. Тангажно-глиссадная метка.
8. Вектор скорости.
9. Метка глиссадной дальности.
На фиг.4 обозначено:
1. Расчетная траектория выравнивания.
2. Касательная к расчетной траектории выравнивания, которая определяет расчетный угол тангажа выравнивания ϑВЫР.
3. Метка выравнивания.
4. Вектор скорости.
5. Метка вектора скорости.
На фиг.5, 6 обозначено:
1. ВПП.
2. Метка вектора скорости.
3. Метка обратного бокового уклонения.
4. Тангажно-глиссадная метка.
5. Метка выравнивания.
6. Метка глиссадной дальности.
Сведения, подтверждающие возможность осуществления изобретения.
Способ управления самолетом при заходе на посадку и посадке реализуется следующим образом.
В процессе полета измеряют и индицируют параметры полета: высоту, скорость, путевой угол, дальность до взлетно-посадочной полосы (ВПП), боковое уклонение от оси ВПП, формируют и индицируют сигналы изображения ВПП (метки заданного путевого угла), метки глиссадной дальности.
1. Формируют сигнал обратного бокового уклонения от оси ВПП.
Определяют боковое отклонение от оси ВПП. На осевой линии ВПП (на линии заданного пути (ЛЗП) при полете по маршруту) определяют точку начала координат (на постоянной дальности от самолета, что обеспечивает постоянную точность (это важно при полете по маршруту), или на постоянной дальности от торца ВПП, что обеспечивает увеличение точности по мере снижения на посадочном курсе). На линии, перпендикулярной осевой линии ВПП (перпендикулярно ЛЗП) откладывают боковое уклонение самолета от оси ВПП (от ЛЗП) с обратным знаком и выбранным масштабным коэффициентом (поз.4 на фиг.1). Полученная точка определяет положение метки обратного бокового уклонения, которую индицируют на экране пилотажно-навигационного индикатора или на авиагоризонте (командно-пилотажном приборе (КПП) - поз.3 на фиг.5, 6).
На пилотажном индикаторе (вид вперед) индицируют изображение ВПП (поз.1 на фиг.5, 6), вектор скорости (поз.2 на фиг.5, 6), метку обратного бокового уклонения (поз.3 на фиг.5, 6), которая индицирует боковое отклонение от оси ВПП с обратным знаком (на фиг.5 самолет находится справа от оси ВПП, метка обратного бокового уклонения - слева) и масштабным коэффициентом (kZ≈1÷15. Чем больше коэффициент kZ-kZ, тем быстрее происходит выход на ЛЗП, тем выше точность стабилизации траектории полета, но и больше расстояние от метки обратного бокового отклонения до ВПП, что приводит к выходу изображения ВПП за пределы экрана. Раскачки не отмечено. Оптимальный kZ≈2÷4). В процессе выхода на линию заданного пути удерживают метку обратного бокового уклонения между метками ВПП (меткой ЗПУ) и вектора скорости (как показано на фиг.5), а при полете по линии заданного пути и при движении по земле (на разбеге и пробеге) удерживают метку вектора скорости на метке обратного бокового уклонения (как показано на фиг.6).
Формируют сигнал рассогласования по курсу, который пропорционален углу между вектором скорости (поз.2 на фиг.1) и направлением на метку обратного бокового уклонения (поз.5 на фиг.1). Полученный сигнал рассогласования обнуляется автопилотом обычным образом и при превышении заданного порогового значения используется для формирования сигнала разовой команды управления по курсу. Если сигнал рассогласования по курсу имеет тот же знак, что и сигнал обратного бокового уклонения (как показано на фиг.1 и фиг.5), то сигнал разовой команды управления по курсу не формируют.
Если сигнал рассогласования по курсу имеет знак, противоположный знаку сигнала обратного бокового уклонения и превышает некоторое выбранное пороговое значение (˜1÷2°), то формируют сигнал разовой команды управления по курсу: «Влево три!» («Вправо три!» - в зависимости от знака бокового уклонения), индицируют его на экране (со стороны, противоположной направлению разворота, - сигнал «Влево три!» индицируют справа от центра экрана) и подают в наушники летчика.
2. Формируют сигнал обратного отклонения от заданной глиссады снижения по высоте.
Измеряют отклонение от заданной глиссады снижения по высоте (поз.4 на фиг.2). На боковом уклонении от осевой линии ВПП (от ЛЗП), определяемом меткой обратного бокового уклонения, определяют точку начала координат (на постоянной дальности от самолета, что обеспечивает постоянную точность (это важно при полете по маршруту и по кругу), или на постоянной дальности от торца ВПП, что обеспечивает увеличение точности по мере снижения на посадочном курсе, облегчая тем самым задачу летчика при большой дальности). Определяют заданную глиссаду снижения (поз.2 на фиг.2) и продолжают ее до пересечения с вертикальной осью начала выбранной системы координат. От полученной точки откладывают измеренное отклонение от заданной глиссады снижения по высоте с обратным знаком и выбранным масштабным коэффициентом (поз.5 на фиг.2). Полученная точка определяет положение тангажно-глиссадной метки (поз.6 на фиг.2) относительно шкалы тангажа (ось «0-Y» на фиг.2 в соответствующем масштабе), которую индицируют на экране пилотажно-навигационного индикатора (поз.4 на фиг.5, 6) или на авиагоризонте (командно-пилотажном приборе (КПП)). Аналогичным образом определяют отклонение от заданной высоты и при стабилизации высоты при полете по маршруту, которое индицируют в виде тангажно-глиссадной метки, отклоняющейся относительно точки на шкале тангажа (а не относительно центра прибора, как это делается сейчас на всех приборах).
Формируют сигнал рассогласования по тангажу, который пропорционален углу между вектором скорости (поз.3 на фиг.2) и направлением на тангажно-глиссадную метку (поз.6 на фиг.2). Полученный сигнал рассогласования обнуляется автопилотом обычным образом и при превышении заданного порогового значения используется для формирования сигнала разовой команды управления по тангажу. Если сигнал рассогласования по тангажу имеет тот же знак, что и сигнал обратного отклонения по высоте (как показано на фиг.5), то сигнал разовой команды управления по тангажу не формируют.
Если сигнал рассогласования по тангажу имеет знак, противоположный знаку сигнала обратного отклонения по высоте (как показано на фиг.2), и превышает некоторое выбранное пороговое значение (˜0.5°), то формируют сигнал разовой команды управления по тангажу: «Глиссада!». При положении летательного аппарата выше глиссады (как показано на фиг.2) этот сигнал индицируют сверху, а при положении летательного аппарата ниже глиссады - снизу экрана и подают в наушники летчика. В горизонтальном полете сигналы разовых команд управления формируют аналогично, а вместо слова «Глиссажа» применяют слово «Высота».
3. Тангажно-глиссадная метка может быть определена и по обратному отклонению от заданной глиссады по дальности.
Определяют разность между дальностью полета до ВПП и глиссадной дальностью:
ΔD=DRW-DГ [1],
где
DRW - дальность до ВПП;
DГ - глиссадная дальность - это дальность полета самолета при следовании по заданной глиссаде с текущей высоты. Она не зависит от траектории захода на посадку, а зависит только от текущей высоты полета и заданного угла наклона глиссады снижения:
где Н - относительная высота полета;
εГ - заданный угол наклона глиссады снижения.
На боковом уклонении от осевой линии ВПП (от ЛЗП), определяемом меткой обратного бокового уклонения, определяют точку начала координат, находящуюся на траверзе ВПП, от которой откладывают разность ΔD между дальностью полета до ВПП и глиссадной дальностью (расстояние от торца ВПП до метки глиссадной дальности с обратным знаком), определяющую положение тангажно-глиссадной метки.
На пилотажном индикаторе или на авиагоризонте (командно-пилотажном приборе (КПП)) индицируют тангажно-глиссадную метку (поз.6 на фиг.2, поз.7 на фиг.3, поз.4 на фиг.5, 6), которая перемещается параллельно осевой линии ВПП, на боковом уклонении от нее, определяемом меткой обратного бокового уклонения, и индицирует расстояние ΔD с обратным знаком и масштабным коэффициентом (kH≈1÷3) или отклонение от глиссады по высоте с обратным знаком. Известную метку глиссадной дальности индицируют также параллельно осевой линии ВПП. При подходе к глиссаде снижения удерживают тангажно-глиссадную метку (поз.4 на фиг.5) между вектором скорости (поз.2 на фиг.5) и меткой глиссадной дальности - поз.6 на фиг.5), а при снижении по глиссаде удерживают вектор скорости самолета на тангажно-глиссадной метке. На фиг.5 видно, что метка глиссадной дальности (поз.6) находится правее метки обратного бокового уклонения (поз.3). Это происходит в результате того, что метка обратного бокового уклонения и метка глиссадной дальности находятся на разных дальностях (дальность до метки обратного бокового уклонения выбирают, а дальность до метки глиссадной дальности определяется высотой полета и углом наклона глиссады).
Индикация на пилотажном индикаторе отклонений от курса и глиссады с обратным знаком относительно оси ВПП и шкалы тангажа соответственно позволяет совместить на одной планке функцию планки положения и директорной планки (которую используют также при автоматическом управлении), не требует точного слежения за метками при выходе на посадочный курс и глиссаду, позволяет обойтись без изображения осевой линии ВПП, не теряя точности стабилизации траектории.
4. Формируют сигнал выравнивания.
Определяют расчетную траекторию выравнивания (поз.1 на фиг.4). В первом приближении - это дуга окружности (исследовались и другие траектории). Определяют касательную к расчетной траектории выравнивания (поз.2 на фиг.4). Эта касательная определяет положение метки выравнивания (поз.3 на фиг.4) на шкале тангажа (ось Y на фиг.4). При моделировании на пилотажном стенде исследовались несколько законов управления при выравнивании. Первым был принят следующий закон изменения угла наклона траектории ϑВЫР:

где
g - ускорение свободного падения;
Н - относительная высота полета;
hПОС - расчетная высота окончания выравнивания (hПОС≈0.5÷1.0);
ΔnY - расчетное приращение перегрузки на выравнивании (ΔnY≈0.15÷0.25);
V - истинная скорость полета.
При снижении по глиссаде метка выравнивания ϑВЫР (поз.3 на фиг.4, поз 5 на фиг.5, 6) поднимается из нижней части экрана (шкалы тангажа) и приближается снизу к метке вектора скорости (поз.2 на фиг.5, 6). При приближении метки выравнивания ϑВЫР к метке вектора скорости начинают выравнивание так, чтобы продолжать удерживать вектор скорости на метке выравнивания ϑВЫР до приземления (как показано на фиг.6). Кроме того, метку выравнивания формируют и индицируют пропорционально сигналу бокового уклонения с обратным знаком и выбранным масштабным коэффициентом и используют ее для контроля следования по посадочному курсу. Форма метки выравнивания заметного значения не имеет (может быть прямоугольной, например).
Формируют сигнал рассогласования по траектории выравнивания, который пропорционален углу между вектором скорости (поз.4 на фиг.4) и направлением на метку выравнивания (поз.3 на фиг.4). При снижении по глиссаде сигнал выравнивания ϑВЫР достигает значения текущего угла тангажа (метка выравнивания на экране совпадает по высоте с меткой вектора скорости) и с этого момента автопилот переключают с обнуления сигнала рассогласования по глиссаде на обнуление сигнала рассогласования по траектории выравнивания.
При снижении ниже расчетной траектории выравнивания (или ниже безопасной высоты полета) формируют, индицируют на экране и подают в наушники летчика сигнал разовой команды управления по тангажу: «Выравнивай, дурак старый!».
Формирование сигнала выравнивания без использования сигнала вертикальной скорости не провоцирует раскачку, безинерционное упреждающее движение метки выравнивания показывает нужный темп выравнивания заранее, что позволяет выполнять выравнивание при полете по приборам в ручном режиме управления.
Формирование сигналов разовых команд управления в зависимости от величины и знака рассогласования позволит своевременно информировать летчика об отклонениях от расчетной траектории полета (что поможет парировать отказы датчиков и автопилота) и избавиться от ненужных подсказок (при правильном пилотировании разовые команды управления не формируются и не выдаются даже при больших уклонениях от заданной траектории полета).
Проведенное моделирование на пилотажном стенде показало возможность выполнения снижения по глиссаде, выравнивания и приземления по указанному способу управления.
Было отмечено сокращение количества меток, упрощение восприятия и переработки приборной информации летчиком за счет наглядного представления положения самолета относительно ВПП, близкого к наглядности визуального полета, что способствует повышению безопасности полета и посадки самолетов, особенно в условиях полета по приборам.
Предлагаемый способ может быть реализован на вновь создаваемых и существующих самолетах, оборудованных известными приборами и системами для измерения параметров полета, а также бортовым вычислителем и дисплеями.
Реализация способа возможна и на электромеханических приборах.
В этом случае отличия от стандартных приборов заключаются в следующем.
1. Горизонтальная планка показывает отклонение от глиссады не относительно метки на приборе, а относительно метки (символа ВПП) на шкале тангажа. (Ось "Y" на фиг.2, 3, 4 является по сути дела шкалой тангажа авиагоризонта в соответствующем масштабе. Относительно этой шкалы (и шкалы курса) и следует индицировать сигналы отклонения с обратным знаком).
2. Вводится дополнительный индекс, символизирующий ВПП (заданный путевой угол) и отклоняющийся вдоль линии горизонта (на авиагоризонте) пропорционально изменению фактического путевого угла.
3. Вертикальная планка положения показывает боковое уклонение не относительно центра прибора, а относительно индекса ВПП (ЗГГУ) с масштабным коэффициентом.
4. Вводится дополнительный индекс - метка выравнивания, символизирующая заданный угол тангажа на выравнивании и отклоняющаяся по закону:
θВЫР=ϑВЫР+α, [4]
где
ϑВЫР - по формуле 3,
α - угол атаки.
5. Директорные планки (или «лидер») отсутствуют.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2011 |
|
RU2478523C2 |
| СПОСОБ ВЫПОЛНЕНИЯ СНИЖЕНИЯ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2002 |
|
RU2280888C2 |
| СПОСОБ ВЫПОЛНЕНИЯ ЗАХОДА НА ПОСАДКУ | 2008 |
|
RU2364943C1 |
| СИСТЕМА ИНДИКАЦИИ ВЗЛЕТА И ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2016 |
|
RU2647344C2 |
| СПОСОБ ЗАХОДА НА ПОСАДКУ | 2002 |
|
RU2242800C2 |
| СПОСОБ ЗАХОДА НА ПОСАДКУ ЛЕТАТЕЛЬНОГО АППАРАТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2559196C1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2284058C2 |
| СПОСОБ ФОРМИРОВАНИЯ ПРОГНОЗА ВЕКТОРА СКОРОСТИ ПОЛЕТА | 2010 |
|
RU2466911C2 |
| Способ определения координат летательного аппарата относительно взлётно-посадочной полосы | 2016 |
|
RU2620587C1 |
| СПОСОБ ФОРМИРОВАНИЯ ПИЛОТАЖНО-НАВИГАЦИОННОЙ ИНФОРМАЦИИ НА МНОГОФУНКЦИОНАЛЬНОМ ИНДИКАТОРЕ ДЛЯ ВЫПОЛНЕНИЯ ПОСАДКИ | 2005 |
|
RU2297596C1 |
Изобретение относится к области авиации и может быть использовано в приборном оборудовании летательного аппарата для упрощения восприятия и переработки информации. Способ управления самолетом и система индикации при выполнения полета по заданной траектории включает измерение и индикацию параметров полета: высоты, скорости, путевого угла, дальности до взлетно-посадочной полосы (ВПП), бокового уклонения от оси ВПП, а также формирование и индикацию сигналов изображения ВПП и метки глиссадной дальности. Боковое уклонение от оси ВПП формируют и индицируют с обратным знаком в виде метки обратного бокового уклонения, в процессе выхода на линию заданного пути удерживают метку обратного бокового уклонения между изображениями ВПП и вектора скорости, а при полете по линии заданного пути удерживают метку вектора скорости на метке обратного бокового уклонения. На экране индицируют также тангажно-глиссадную метку, индицирующую отклонение от глиссады по высоте или по дальности с обратным знаком, при подходе к глиссаде снижения удерживают тангажно-глиссадную метку между вектором скорости и меткой глиссадной дальности, а при снижении по глиссаде удерживают метку вектора скорости самолета на тангажно-глиссадной метке. Индикация на пилотажном индикаторе отклонений от курса и глиссады относительно шкал курса и тангажа с обратным знаком позволяет совместить на одной планке функцию планки положения и директорной планки, обойтись без изображения осевой линии ВПП, не требует точного обнуления каких-либо сигналов при больших отклонениях от заданной траектории. 5 з.п. ф-лы, 6 ил.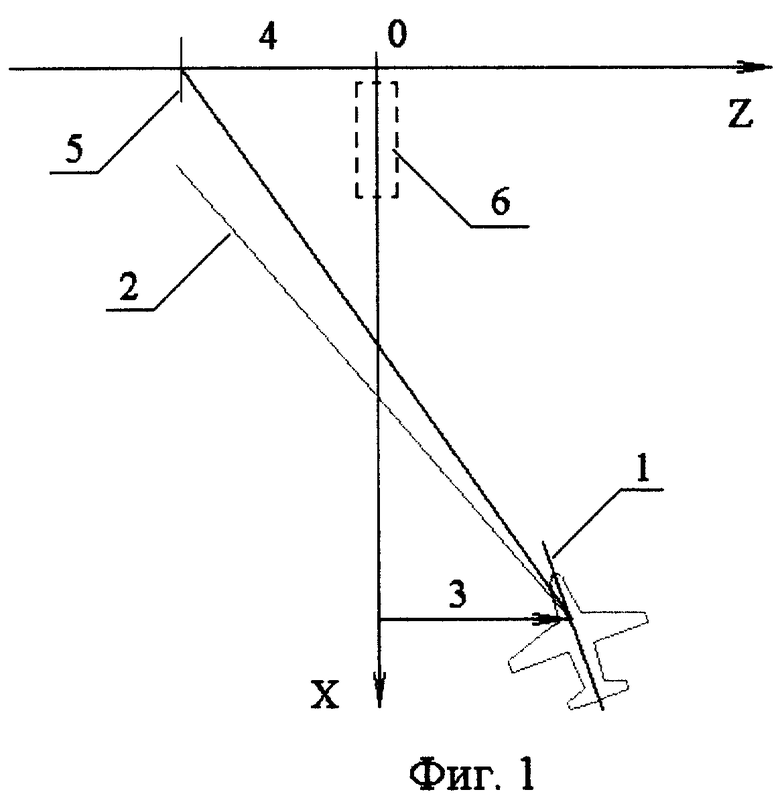
| СПОСОБ АВТОМАТИЧЕСКОЙ ПОСАДКИ САМОЛЕТА | 1993 |
|
RU2061624C1 |
| СПОСОБ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2002 |
|
RU2214943C1 |
| СПОСОБ ЗАХОДА НА ПОСАДКУ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И СИСТЕМА ЕГО ОБЕСПЕЧЕНИЯ | 1999 |
|
RU2156720C1 |
| US 3964015 А, 15.06.1976 | |||
| JP 1119500 A, 11.05.1989. | |||

