Изобретение относится к устройствам отображения информации, используемой пилотом и членами экипажа при пилотировании вертолетом, а именно к командно-пилотажным индикаторам (КПИ).
Наиболее близким по технической сущности к заявляемому техническому решению является «Командно-пилотажный индикатор». Патент на изобретение РФ №2539708 заявка №2013158499/11, приоритет изобретения 30 декабря 2013 г. МПК G01C 23/00, G05D 1/00, который состоит из экрана, на котором индицируются: - неподвижный относительно центра индикационного поля экрана отсчетный индекс "Самолет", выполненный в виде одной горизонтальной прямой, символизирующей крылья летательного аппарата (ЛА), и одной вертикальной прямой, символизирующей киль ЛА, и пересекающей горизонтальную прямую в ее центре под прямым углом, имеющий возможность поворота вокруг своего центра симметрии и обозначающий текущее положение вертолета в пространстве; - подвижный индекс "Лидер", выполненный в виде одной горизонтальной прямой, символизирующей крылья ЛА и одной вертикальной прямой, символизирующей киль ЛА, и пересекающей горизонтальную прямую в ее центре под прямым углом, имеющий возможность поворота вокруг своего центра симметрии, а также перемещения по вертикали и горизонтали относительно индекса "Самолет" и обозначающий требуемое положение вертолета в пространстве. - генератор символов соединенный с экраном, Средствами управления подвижным индексом "Лидер", выполнены в виде блоков вычисления характеристик "Лидера": - блока вычисления параметров текущего угла скольжения; - блока вычисления расчетного угла скольжения; блока вычисления значения расчетного угла крена; - блока расчета отклонения ЛА по высоте полета и коэффициента масштаба отклонения высоты полета ЛА; - блока вычисления значения расчетного угла тангажа; - блока расчета бокового отклонения и коэффициента масштаба бокового отклонения ЛА, на входы которых поступают сигналы из систем ЛА, а с выходов которых на генератор символов поступают сигналы в соответствии с величиной ошибки управления по высоте, обеспечивающие перемещение индекса "Лидер" по индикационному полю в вертикальном направлении, а также сигналы индицирующие индекс "радиовысота" и неподвижную неравномерную шкалу значения высоты полета, индицируемую на вертикальной стороне границы индикационного поля экрана с нулевым значением высоты, расположенной на уровне горизонтальной линии, проходящей через центр индикационного поля экрана; индекс "Самолет" и индекс "Лидер" выполнены с возможностью одновременного отображения угла скольжения и угла тангажа, путем индикации треугольника. Основание треугольника равно длине горизонтальной прямой линии символизирующей крылья ЛА, а положение вершины треугольника соответствует текущему значению угла тангажа и угла скольжения для индекса "Самолет" и отклонению от заданного значения угла тангажа и угла скольжения для индекса "Лидер". Индекс "Лидер" выполнен с возможностью поворота вокруг центра симметрии в соответствии с величиной ошибки по углу крена, увеличением или уменьшением линейных размеров при увеличении или уменьшении, соответственно, заданной скорости полета таким образом, что при нулевых значениях ошибок по всем контролируемым параметрам индекс "Лидер" совмещается с индексом "Самолет" командно-пилотажный индикатор (КПИ) снабжен: - блоком учета расхода в полете массы полезной нагрузки вертолета; - блоком, индицирующим указатель скорости полета вертолета, указатель скорости полета вертолета с числовой шкалой, индекс указателя текущей скорости полета вертолета, индекс указателя заданной скорости полета вертолета; - блоком вычисления в связанной с вертолетом системе координат пространственного положения центра масс, моментов инерции вертолета в полете и значения параметра продольного расстояния от центра масс вертолета до оси несущего винта; - блоком расчета прогнозируемой скорости полета вертолета и переключателем блоков автопилота функций автоматаческой стабилизации по тангажу, высоте и скорости, причем вход блока учета расхода в полете массы полезной нагрузки вертолета соединен с системами ЛА по параметрам расходуемой в полете массы полезной нагрузки вертолета, а выход соединен с входом блока вычисления в связанной с вертолетом системе координат пространственного положения центра масс, моментов инерции вертолета в полете и значение параметра продольного расстояния от центра масс вертолета до оси несущего винта по параметру расходуемой в полете полезной нагрузки вертолета, выход которого соединен с первым входом блока расчета прогнозируемой скорости полета вертолета по параметру продольного расстояния от центра масс вертолета до оси несущего винта, а второй вход блока расчета прогнозируемой скорости полета вертолета соединен через переключатель блоков автопилота функций автоматической стабилизации по тангажу, высоте и скорости по параметру текущего значения угла тангажа, а выход блока прогнозируемой скорости полета вертолета по параметру заданной скорости полета вертолета и выход блока системы автоматического управления полетом по параметру текущей скорости полета вертолета соединены с входом блока индицирующего указатель скорости полета вертолета, выход которого соединен с генератором символов, который выполнен с возможностью индикации прибора указателя скорости полета вертолета с числовой шкалой и индексом указателя текущей скорости полета вертолета и индексом указателя заданной скорости полета вертолета, представленных в виде узких тонких пластин с заостренным концом, установленных с возможностью вращения относительно оси прибора указателя скорости полета вертолета. В известных командно-пилотажных индикаторах реализованные алгоритмы функциональных возможностей соответствуют современному направлению развития базовых интегрированных комплексов бортового оборудования авионики, которая облегчает управление вертолетом в сложных метеоусловиях и снижает психофизиологическую нагрузку на летчика, что выражается в представлении на экране КПИ изображения индексов «Самолет», «Лидер», «радиовысоты», расположением шкалы полета вне поля экрана, одновременном графическом изображении угла крена, угла тангажа, угла скольжения и визуализируется навигационной информацией полета, разделенной для индикационного и навигационного полей экрана КПИ.
Однако ни в одном из известных КПИ не упоминается возможность управлении полетом вертолета с использованием бортового блока траекторного вычислителя прогнозирующего пространственное и угловое положение вертолета в вертикальном нисходящем маневре соосного вертолета. Вертикальный нисходящий маневр соосного вертолета в полетном задании летчик выполняет тогда, когда требуется экстренно снизиться с высоты полета в несколько километров до высоты полета не превышающей сотню метров за минимальное время. Вертикальный нисходящий маневр соосного вертолета характеризуется полетом вертолета с отрицательным углом тангажа (близким к вертикали) и вращением относительно вертикальной оси. Полет проходит скоротечно (не более одной минуты) и требует от летчика большого профессионального мастерства и мужества. Летчику оценивать образ полет по приборам навигации не представляется возможным, т.к. стремительно приближающаяся и вращающаяся земная поверхность и движущиеся стрелки приборов навигации являются только возмущающим и отвлекающим для летчика фактором. В данном кратковременном полете летчик должен точно видеть предельный момент начала безопасного выхода из вертикального нисходящего маневра соосного вертолета, который должен соответствовать минимальной скорости изменения координированного угла поворота траектории, безопасной высоте полета и нулевому значению величины общего шага органа управления. В режиме ручного управления вертолетом, когда отключен индекс «Лидер», вертикальный нисходящий маневр соосного вертолета, представленный показаниями стрелок навигационных приборов вертолета, не создает одномоментный образ полета по значениям параметров высоты, скорости (вертикальной и горизонтальной), углового положения в пространстве по углу тангажа, углу крена, углу рыскания, угла поворота траектории. Технической задачей заявляемого изобретения является: - упрощение ручного пилотирования вертолетом в вертикальном нисходящем маневре соосного вертолета за счет повышения информативности изображения стилизованного образа вертолета на индикационное поле экрана в виде элемента компьютерной графики объемного изображения индекса «Самолет» ночью и в сложных метеоусловиях;
- снижение психофизиологической и нервной нагрузки летчика в процессе удержания вертолета в заданных параметрах полета, что важно в условиях перепада давления, дефицита времени на принятие решения;
- повышение безопасности полета за счет уменьшения нагрузки связанной с наблюдением за навигационными приборами полета.
Техническая задача достигается тем, что командно-пилотажный индикатор вертолета, содержащий экран, на котором индицируются неподвижный относительно центра индикационного поля экрана отсчетный индекс "Самолет", выполненный в виде одной горизонтальной прямой, символизирующей крылья летательного аппарата (ЛА), и одной вертикальной прямой, символизирующей киль ЛА, и пересекающей горизонтальную прямую в ее центре под прямым углом, имеющий возможность поворота вокруг своего центра симметрии и обозначающий текущее положение вертолета в пространстве, индицируемый на экране подвижный индекс "Лидер", выполненный в виде одной горизонтальной прямой, символизирующей крылья ЛА и одной вертикальной прямой, символизирующей киль ЛА, и пересекающей горизонтальную прямую в ее центре под прямым углом, имеющий возможность поворота вокруг своего центра симметрии, а также перемещения по вертикали и горизонтали относительно индекса "Самолет" и обозначающий требуемое положение в пространстве, генератор символов соединенный с экраном, средства управления подвижным индексом "Лидер", выполненные в виде блоков вычисления характеристик "Лидера" а именно: блока вычисления параметров текущего угла скольжения, - блока вычисления значения расчетного угла крена, блока вычисления расчетного угла скольжения, блока расчета отклонения ЛА по высоте полета и коэффициента масштаба отклонения высоты полета ЛА, блока вычисления значения расчетного угла тангажа, блока расчета бокового отклонения и коэффициента масштаба бокового отклонения ЛА, на входы которых поступают сигналы из систем ЛА, а с выходов которых на генератор символов поступают сигналы в соответствии с величиной ошибки управления по высоте, обеспечивающие перемещение индекса "Лидер" по индикационному полю в вертикальном направлении, с возможностью индикации индекса "радиовысота" и неподвижной неравномерной шкалы значения высоты полета, индицируемой на вертикальной стороне границы индикационного поля экрана с нулевым значением высоты, расположенным на уровне горизонтальной линии, проходящей через центр индикационного поля экрана, при этом, индекс "Самолет" и индекс "Лидер" выполнены с возможностью одновременного отображения угла скольжения и угла тангажа, путем индикации треугольника, основание которого равно длине горизонтальной прямой линии символизирующей крылья ЛА, а положение вершины треугольника соответствует текущему значению угла тангажа и угла скольжения индексом "Самолет" и отклонению от заданного значения угла тангажа и угла скольжения индексом "Лидер" поворотом индекса "Лидер" вокруг центра симметрии в соответствии с величиной ошибки по углу крена, увеличением или уменьшением линейных размеров индекса «Лидер» при увеличении или уменьшении, соответственно, заданной скорости полета таким образом, что при нулевых значениях ошибок по всем контролируемым параметрам индекс "Лидер" совмещается с индексом "Самолет", командно-пилотажный индикатор содержит: блок учета расхода в полете массы полезной нагрузки вертолета, блоком индицирующим указатель скорости полета вертолета, указателем скорости полета вертолета с числовой шкалой, индексом указателя текущей скорости полета вертолета, индексом указателя заданной скорости полета вертолета, блок вычисления в связанной с вертолетом системе координат пространственного положения центра масс, моментов инерции вертолета в полете и значения параметра продольного расстояния от центра масс вертолета до оси несущего винта, блок расчета прогнозируемой скорости полета вертолета и переключатель блоков автопилота функций автоматической стабилизации по тангажу, высоте и скорости, причем вход блока учета расхода в полете массы полезной нагрузки вертолета соединен с системами ЛА по параметрам расходуемой в полете массы полезной нагрузки вертолета, а выход соединен с входом блока вычисления в связанной с вертолетом системе координат пространственного положения центра масс, моментов инерции вертолета в полете и значения параметра продольного расстояния от центра масс вертолета до оси несущего винта по параметру расходуемой в полете полезной нагрузки вертолета, выход которого соединен с первым входом блока расчета прогнозируемой скорости полета вертолета по параметру продольного расстояния от центра масс вертолета до оси несущего винта, а второй вход блока расчета прогнозируемой скорости полета вертолета соединен через переключатель блоков автопилота функций автоматической стабилизации по тангажу, высоте и скорости по параметру текущего значения угла тангажа, а выход блока прогнозируемой скорости полета вертолета по параметру заданной скорости полета вертолета и выход блока системы автоматического управления полетом по параметру текущей скорости полета вертолета соединены с входом блока индицирующим указатель скорости полета вертолета представляя указатель скорости полета вертолета с числовой шкалой, индексом указателя текущей скорости полета вертолета, индексом указателя заданной скорости полета вертолета, выход которого соединен с генератором символов, который выполнен с возможностью индикации прибора указателя скорости полета вертолета с числовой шкалой и индексом указателя текущей скорости полета вертолета и индексом указателя заданной скорости полета вертолета, представленных в виде узких тонких пластин с заостренным концом, установленных с возможностью вращения относительно оси прибора указателя скорости полета вертолета, дополнительно снабжен: - блоком объемной геометрической формы индекса "Самолет", - блоком подготовки к визуализации индекса "Самолет" в вертикальном нисходящем маневре соосного вертолета, - блоком логических переключателей, - переключателем вывода на индикационное поле экрана изображение объемного индекса "Самолет" в вертикальном нисходящем маневре соосного вертолета, - переключателем вывода на индикационное поле экрана изображение индекса "Самолет" и индекса "Лидер", - блоком, индицирующим на индикационном поле экрана объемный индекс "Самолет" в вертикальном нисходящем маневре соосного вертолета, причем выход блока объемной геометрической формы индекса "Самолет" соединен с входом блока системы автоматического управления полетом по параметрам: - координат крайней точки левого крыла вертолета, - координат крайней точки правого крыла вертолета, - координат крайней верхней точки киля вертолета, - координат крайней нижней точки киля вертолета, - координат передней носовой точки вертолета, - координаты центра индикационного поля вдоль вертикальной оси, - координаты центра индикационного поля вдоль боковой оси, предельно-минимальной высоты полета вертолета при выходе из вертикального нисходящего маневра соосного вертолета, - предельно-минимального значения угла тангажа, первый выход блока траекторного вычислителя соединен с блоком системы автоматического управления полетом по вычисляемым параметрам системы дифференциальных уравнений пространственного движения вертолета: проекций вектора скорости полета вертолета на оси земной системы координат, пространственного положения центра масс вертолета в осях земной системы координат по дальности, высоте, боковому отклонению, проекций вектора угловой скорости вертолета в осях связанной системы координат, модуля вектора угловой скорости вращения вертолета, значений угла тангажа, угла рыскания, угла крена, угла поворота траектории, угла наклона траектории, второй выход блока траекторного вычислителя соединен с первым входом блока подготовки к визуализации индекса "Самолет" в вертикальном нисходящем маневре соосного вертолета по параметру вычисляемого значения пространственного положения центра масс вертолета по высоте в осях земной системы координат в вертикальном нисходящем маневре соосного вертолета, второй вход блока подготовки к визуализации индекса "Самолет" в вертикальном нисходящем маневре соосного вертолета соединен с блоком системы автоматического управления полетом по параметрам текущего угла поворота траектории, текущего угла тангажа, текущего угла рыскания, текущего угла крена, координат крайней точки левого крыла вертолета, координат крайней точки правого крыла вертолета, координат крайней верхней точки киля вертолета, координат крайней нижней точки киля вертолета, координат передней носовой точки вертолета, координаты центра индикационного поля вдоль вертикальной оси, координаты центра индикационного поля вдоль боковой оси, причем выход блока подготовки к визуализации индекса "Самолет" в вертикальном нисходящем маневре соосного вертолета соединен с первым входом блока логических переключателей по параметру вычисленного значения пространственного положения центра масс вертолета по высоте в осях земной системы координат в вертикальном нисходящем маневре соосного вертолета, второй вход блока логических переключателей соединен с блоком системы автоматического управления полетом по параметру предельно-минимального значения угла тангажа, параметру предельно-минимальной высоты полета вертолета при выходе из вертикального нисходящего маневра соосного вертолета и параметру текущего значения угла тангажа, первый выход блока логических переключателей соединен через переключатель вывода на индикационное поле экрана изображение объемного индекса "Самолет" в вертикальном нисходящем маневре соосного вертолета с блоком, индицирующим на индикационном поле экрана объемный индекс "Самолет" в вертикальном нисходящем маневре соосного вертолета, второй выход блока логических переключателей соединен через переключатель вывода на индикационное поле экрана изображение индекса "Самолет" и индекса "Лидер" с блоком, индицирующим на индикационном поле экрана подвижный индекс неуправляемый летчиком "Лидер", и блоком, индицирующим на индикационном поле экрана подвижный индекс управляемый летчиком "Самолет", причем при включении переключателя вывода на индикационное поле экрана изображение объемного индекса "Самолет" в вертикальном нисходящем маневре соосного вертолета, включается блок, индицирующий на индикационном поле экрана объемный индекс "Самолет" в вертикальном нисходящем маневре соосного вертолета, одновременно отключается переключатель вывода на индикационное поле экрана изображение индекса "Самолет" и индекса "Лидер", и отключаются блок, индицирующий на индикационном поле экрана подвижный индекс неуправляемый летчиком "Лидер", и блок, индицирующий на индикационном поле экрана подвижный индекс управляемый летчиком "Самолет", при отключении переключателя вывода на индикационное поле экрана изображение объемного индекса "Самолет" в вертикальном нисходящем маневре соосного вертолета, отключается блок, индицирующий на индикационном поле экрана объемный индекс "Самолет" в вертикальном нисходящем маневре соосного вертолета, одновременно включается переключатель вывода на индикационное поле экрана изображение индекса "Самолет" и индекса "Лидер", и включаются блок, индицирующий на индикационном поле экрана подвижный индекс неуправляемый летчиком "Лидер", и блок, индицирующий на индикационном поле экрана подвижный индекс управляемый летчиком "Самолет", причем когда выполняется условие, при котором, значение текущего угла тангажа меньше или равно значению предельно-минимального угла тангажа, и, одновременно, вычисленное значение пространственного положения центра масс вертолета в осях земной системы координат по высоте больше или равно значения предельно-минимальной высоты полета вертолета при выходе из вертикального нисходящего маневра соосного вертолета, то включается переключатель вывода на индикационное поле экрана изображение объемного индекса "Самолет" в вертикальном нисходящем маневре соосного вертолета, если значение текущего угла тангажа больше значения предельно-минимального угла тангажа, или вычисленное значение пространственного положения центра масс вертолета в осях земной системы координат по высоте меньше значения предельно-минимальной высоты полета вертолета при выходе из вертикального нисходящего маневра соосного вертолета, то отключается переключатель вывода на индикационное поле экрана изображение объемного индекса "Самолет" в вертикальном нисходящем маневре соосного вертолета, и включается переключатель вывода на индикационное поле экрана изображение индекса "Самолет" и индекса "Лидер".
Изобретение поясняется чертежами.
На фигуре 1 изображена схема сопряжения систем вертолета с командно-пилотажным индикатором.
На фигуре 2 изображена функциональная схема командно-пилотажного индикатора.
На фигуре 3 изображен экран командно-пилотажного индикатора с визуализацией режима директорного автоматического управления полета вертолетом.
На фигуре 4 изображена связь земной системы координат со связанной системой координат через углы крена, тангажа, скольжения.
На фигуре 5 изображен объемный индекс "Самолет".
На фигуре 6 изображена схема переключения индикационной части экрана командно-пилотажного индикатора для визуализации полета в вертикальном нисходящем маневре соосного вертолета.
На фигуре 7 изображен экран командно-пилотажного индикатора с визуализацией режима ручного управления полетом в вертикальном нисходящем маневре соосного вертолета.
На фигуре 8 изображена блок-схема алгоритма подготовки к визуализации объемного индекса "Самолет" в вертикальном нисходящем маневре соосного вертолета.
На фигуре 9 изображена блок-схема пересчета координат объемного индекса «Самолет» в координаты плоскости индикационного поля экрана командно-пилотажного индикатора.
На фигуре 10 изображена блок-схема вычисления значения индекса пространственного положения «I».
На фигуре 11 изображена блок-схема вычисления последовательности вывода сформированных элементов поверхностей объемного индекса «Самолет», в зависимости от величины индекса последовательного вывода «J».
На фигуре 12 изображена общая блок-схема вычисления индекса последовательного вывода «J» для вывода элементов поверхностей объемного индекса «Самолет» в зависимости от значения индекса пространственного положения «I», угла поворота траектории и угла тангажа.
На фигуре 13 изображена блок-схема вычисления индекса последовательного вывода «J» для вывода элементов поверхностей объемного индекса «Самолет» в зависимости от значения индекса пространственного положения, равного единице «I=1», угла поворота траектории и угла тангажа.
На фигуре 14 изображена блок-схема вычисления индекса последовательного вывода «J» для вывода элементов поверхностей объемного индекса «Самолет» в зависимости от значения индекса пространственного положения равного два «I=2», угла поворота траектории и угла тангажа
На фигуре 15 изображена блок-схема вычисления индекса последовательного вывода «J» для вывода элементов поверхностей объемного индекса «Самолет» в зависимости от значения индекса пространственного положения равного три «I=3», угла поворота траектории и угла тангажа
На фигурах 16÷31 изображены фрагменты визуализации положения элементов поверхностей объемного индекса «Самолет» в зависимости от угла поворота траектории в вертикальном нисходящем маневре соосного вертолета.
На фигуре 32 изображена схема пространственной траектории полета в вертикальном нисходящем маневре соосного вертолета, выполненного Бездетновым Николаем Павловичем.
Заявляемый командно-пилотажный индикатор вертолета состоит из:
- экрана командно-пилотажного индикатора 1, далее экран 1, разделенного на навигационное поле 2 экрана 1 и индикационное поле 3 экрана 1;
- блока, индицирующего на индикационном поле 3 экрана 1 подвижный индекс неуправляемый летчиком "Лидер" 4, далее "Лидер" 4:
- блока индицирующего на индикационном поле 3 экрана 1 подвижный индекс управляемого летчиком "Самолет" 5, далее "Самолет" 5;
- блока индицирующего на навигационном поле 2 и индикационном поле 3 экрана 1 неподвижную неравномерную расположенную на вертикальной стороне границы навигационного поля 2 и индикационного поля 3 экрана 1 шкалу значения высоты 6 полета вертолета, далее шкала высоты 6;
- блока индицирующего на навигационном поле 2 экрана 1 различную навигационную информацию текущих значений параметров полета вертолета 7 (например: указатель курса, указатель вертикальной скорости полета (вариометр) и другие приборы);
- блока индицирующего на экране 1 индекс "радиовысоты" 8;
- блока командно-пилотажного индикатора (КПИ) 9;
- блока системы автоматического управления полетом (САУП) 10;
- блока системы воздушных сигналов (СВС) 11;
- блока инерциальной навигационной системы (ИНС) 12;
- блока навигационного вычислителя исходных данных (НВ ИД) 13;
- блока навигационного вычислителя расчетных данных (НВ РД) 14;
- блока генератора символов (ГС) 15;
- блока вычисления параметров текущего угла скольжения 16;
- блока вычисления значения расчетного угла крена 17;
- блока вычисления расчетного угла скольжения 18;
- блока вычисления коэффициента скорости полета вертолета 19;
- блока расчета отклонения вертолета по высоте полета и коэффициента масштаба отклонения высоты полета вертолета 20;
- блока вычисления значения расчетного угла тангажа 21;
- блока расчета бокового отклонения и коэффициента масштаба бокового отклонения вертолета 22.
- переключатель блоков автопилота функций автоматической стабилизации по тангажу, высоте, скорости, крену и курсу (вАП) 23;
- органов управления вертолетом (ОУ) 24;
- блока автопилота функций автоматической стабилизации (АС) 25;
- блока автопилота функции стабилизации по тангажу (Aυ) 26;
- блока автопилота функции стабилизации по высоте (Ан) 27;
- блока автопилота функции стабилизации по скорости (Av) 28;
- блока автопилота функции стабилизации по крену (Аγ) 29;
- блока автопилота функции стабилизации по курсу (Аψ) 30;
- блока расчета прогнозируемой скорости полета вертолета (ПС) 31;
- блока вычисления в связанной с вертолетом системе координат пространственного положения центра масс, моментов инерции вертолета в полете и значение параметра продольного расстояния от центра масс вертолета до оси несущего винта (ЦМ) 32;
- блока учета расхода в полете массы полезной нагрузки вертолета (например: топливо, грузы, боезапас) (РПН) 33;
- переключателя ввода исходных данных параметров программной трехмерной траектории полета вертолета (В) 34;
- блока индицирующего на индикационном поле 3 экрана 1 команду «убрать шасси»/«выпустить шасси» для индекса "Лидер" 4 (КШ) 35;
- блока внутреннего языка для визуализации переменной шкалы высоты полета вертолета (Ш) 36;
- указателя скорости полета вертолета (УС) 37;
- указателя вертикальной скорости полета вертолета (ВС) 38;
- блока объемной геометрической формы индекса "Самолет" (ГФ) 39;
- блока подготовки к визуализации индекса "Самолет" в вертикальном нисходящем маневре соосного вертолета (ВМ) 40;
- блока индицирующего указатель скорости полета вертолета (БУС) 41;
- блока траекторного вычислителя (ТВ) 42;
- блока начальных условий траекторного вычислителя (НУ ТВ) 43;
- блока логических переключателей (ЛП) 44;
- переключателя вывода на индикационное поле экрана изображение объемного индекса "Самолет" в вертикальном нисходящем маневре соосного вертолета (далее - переключатель (ПВМ) 45).
- переключателя вывода на индикационное поле экрана изображение индекса "Самолет" и индекса "Лидер" (далее - переключатель (ПСЛ) 46).
- блока индицирующего на индикационном поле экрана объемный индекс "Самолет" в вертикальном нисходящем маневре соосного вертолета (ИВМ) 47.
- индекса заданной скорости полета вертолета - 48.
- индекса текущей скорости полета вертолета - 49.
Полетная информация (фиг. 1) визуализируется летчику вертолета на индикационном поле 3 и навигационном поле 2 экрана 1 блока командно-пилотажного индикатора (КПИ) 9, по параметрам полета, поступающим с выхода блока системы автоматического управления полетом (САУП) 10 на вход (КПИ) 9:
- текущее значение высоты полета вертолета - Yтек;
- программно задаваемая высота полета вертолета на маршруте - Yзад;
- текущее боковое отклонении вертолета - Zтек;
- программно задаваемое боковое отклонение полета вертолета - Zзад;
- текущее значение вектора скорости вертолета - Vтек;
- заданное значение вектора скорости вертолета - Vзад;
- текущее значение угла поворота траектории вертолета - ψ°тек;
- программно задаваемый угол поворота траектории вертолета - ψ°зад;
- текущее значение угла наклона траектории вертолета - Θ°тек;
- программно задаваемый угол наклона траектории вертолета - Θ°зад;
- текущее значение угла тангажа - υ°тек;
- программно задаваемое угловое положение вертолета на траектории по углу тангажа - υ°зад;
- текущее значение угла крена - γ°тек;
- программно задаваемое угловое положение вертолета на траектории по углу крена - γ°зад;
- текущее значение угла рыскания - ϕ°тек;
- программно задаваемое угловое положение вертолета на траектории по углу рыскания - ϕ°зад;
- программно задаваемая высота полета вертолета на исполнение команды «убрать шасси»/«выпустить шасси» - Ншас.
- текущая проекция вектора вертикальной скорости вертолета - Vygек
- вычисленные проекции вектора скорости полета вертолета в осях земной системы координат: Vxa, Vya, Vza;
- вычисленное пространственное положение центра масс вертолета в осях земной системы координат: Ха, Ya, Za (дальность, высота, боковое отклонение).
- вычисленное значение вектора угловой скорости вертолета в осях связанной системы координат ωxa, ωya, ωza;
- вычисленное значение модуля угловой скорости вращения вертолета -Ωa=√(ωxa2+ωya2+ωza2).
- вычисленное значение угла крена, тангажа, рыскания, соответственно, γ°а, υ°а, ϕ°а;
- вычисленное значение угла курса (угла поворота траектории) - ψ°a;
- вычисленное значение угла наклона траектории) - Θ°а;
- координата крайней точки левого крыла вертолета L;
- координата крайней точки правого крыла вертолета R;
- координата крайней верхней точки киля вертолета U;
- координата крайней нижней точки киля вертолета В;
- координата передней носовой точки вертолета N;
- координата центра индикационного поля вдоль вертикальной оси Y (Yc);
- координата центра индикационного поля вдоль боковой оси Z (Zc);
- предельно-минимальная высота полета вертолета при выходе из вертикального нисходящего маневра соосного вертолета - Yпр;
- предельно-минимальное значение угла тангажа - υ°пр;
Для визуализации полетной информации в блоке командно-пилотажного индикатора (КПИ) 9 (фиг. 1) используются внутренние рабочие переменные блока:
- текущее значение угла тангажа - υ°тек;
- расчетное значение угла тангажа - υ°расч;
- текущее значение угла крена - γ°тек;
- расчетное значение угла крена - γ°расч;
- текущее значение угла скольжения - β°тек;
- расчетное значение угла крена - β°расч;
- коэффициента масштаба отклонения высоты полета ЛА - mY;
- коэффициента масштаба бокового отклонения ЛА - mZ;
- коэффициента масштаба скорости полета ЛА - mV;
- текущее значение высоты полета вертолета - Yтек;
- программно задаваемая высота полета вертолета на исполнение команды «убрать шасси»/«выпустить шасси» - Ншас;
- текущая проекция вектора вертикальной скорости вертолета – Vygтек;
- текущее значение угла поворота траектории вертолета - ψ°тек;
- вычисленное пространственное положение центра масс вертолета в осях земной системы координат по высоте – Ya;
- координата крайней точки левого крыла вертолета L;
- координата крайней точки правого крыла вертолета R;
- координата крайней верхней точки киля вертолета U;
- координата крайней нижней точки киля вертолета В;
- координата передней носовой точки вертолета N;
- координата центра индикационного поля вдоль вертикальной оси Y (Yc);
- координата центра индикационного поля вдоль боковой оси Z (Zc);
- предельно-минимальная высота полета вертолета при выходе из вертикального нисходящего маневра соосного вертолета - Yпp;
- предельно-минимальное значение угла тангажа - υ°пр.
На вход блока системы автоматического управления полетом (САУП) 10 для вычисления управляющих сигналов и параметров визуализации поступают параметры полета от основных систем вертолета:
- с выхода блока системы воздушных сигналов (СВС) 11 параметры текущего значения высоты полета вертолета - Yтек, текущего значения вектора скорости вертолета - Vтек, текущая проекция вектора вертикальной скорости вертолета - Vygтек и текущие горизонтальные проекции вектора средней скорости ветра в земной системе координат - Wind=f (Wxg, Wzg). Wind - модуль текущего вектора средней скорости ветра, Wxg, Wzg - горизонтальная проекция вектора средней скорости ветра в (Wind тек) в земной системе координат.
- с выхода блока инерциальной навигационной системы (ИНС) 12 поступают параметры углового и пространственного положения вертолета: (υ°тек, γ°тек, ϕ°тек), соответственно, текущее значение угла тангажа, текущее значение угла крена, текущее значение угла рыскания и (Хтек) - текущее значение дальности полета вертолета, (Zтек) - текущее боковое отклонении вертолета;
- с выхода блока навигационного вычислителя исходных данных (НВ ИД) 13 поступают параметры трехмерной программной траектории полета в земной системе координат: время полета на маршруте - Т, дальность на маршруте от точки старта - Хзад, высота полета на маршруте - Yзад, боковое отклонение - Zзад, программно-задаваемая высота полета вертолета на исполнение команды «убрать шасси»/«выпустить шасси» - Ншас. Одновременно эти же параметры трехмерной программной траектории полета в земной системе координат, дополненные инерционно-массовыми характеристиками Ixx, Iyy, Izz, Ixy, Ixz, Iyz для связанных осей вертолета, поступают на вход блока навигационного вычислителя расчетных данных (НВ РД) 14;
- с выхода блока навигационного вычислителя расчетных данных (НВ РД) 14 поступают на вход блока системы автоматического управления полетом (САУП) 10 (вычисленные по входным параметрам блока (НВ ИД) 13) дополнительно задаваемые параметры полета:
- в земной системе координат (ЗСК) oXgYgZg:
Vxg зад - проекции скорости на ось Xg;
Vyg зад - проекции скорости на ось Yg;
Vzg зад - проекции скорости на ось Zg;
ψ°зад - угол поворота траектории полета вертолета;
Θ°зад - угол наклона траектории ЛА;
- в связанной с вертолетом системе координат oX1Y1Z1:
υ°зад - угол тангажа,
ϕ°зад - угол рыскания.
γ°зад - угол крена,
Ixx - центральный момент инерции вдоль оси X1;
Iyy - центральный момент инерции вдоль оси Y1;
Izz - центральный момент инерции вдоль оси Z1;
Ixy - центробежный момент инерции в плоскости oX1Y1;
Ixz - центробежный момент инерции в плоскости oX1Z1;
Iyz - центробежный момент инерции в плоскости oY1Z1.
На вход блока учета расхода в полете массы полезной нагрузки вертолета (например: топливо, грузы, боезапас) (РПН) 33 от основных систем вертолета поступают значения параметров расходуемой в полете массы полезной нагрузки вертолета: Mm (t, xm, ym, zm) - масса полезной нагрузки; t -время полета; xm, ym, zm - координаты центра масс полезной нагрузки в связанной с вертолетом системе координат. С выхода блока учета расхода в полете массы полезной нагрузки вертолета (например: топливо, грузы, боезапас) (РПН) 33 параметры массы полезной нагрузки и ее координаты изменяемые во время полета в связанной с вертолетом системе координат поступают в блок вычисления в связанной с вертолетом системе координат пространственного положения центра масс, моментов инерции вертолета в полете и значение параметра продольного расстояния от центра масс вертолета до оси несущего винта (ЦМ) 32, в котором определяется текущая масса вертолета (Мв) и координаты центра масс вертолета в связанной с вертолетом системе координат: Мв (t, хв, ув, zв) - текущая масса вертолета; t - время полета; (хв, ув, zв) - координаты текущего центра масс вертолета в связанной с вертолетом системе координат, текущее значение (Хт(t)) продольного расстояния от оси несущего винта до центра масс вертолета и величины моментов инерции вертолета в полете (Iххв, Iуув, Izzb, Iхув, Ixzв, Iуzв).
С первого выхода блока вычисления в связанной с вертолетом системе координат пространственного положения центра масс, моментов инерции вертолета в полете и значения параметра продольного расстояния от центра масс вертолета до оси несущего винта (ЦМ) 32 в блок системы автоматического управления полетом (САУП) 10 поступают параметры текущей массы вертолета - (Мв), координаты текущего центра масс вертолета в связанной с вертолетом системе координат - (хв, ув, zв), текущее значение (Xt(t)) продольного расстояния от оси несущего винта до центра масс вертолета и текущие величины моментов инерции вертолета в полете (Iххв, Iуув, Izzb, Iхув, Ixzb, Iуzв).
Со второго выхода блока вычисления в связанной с вертолетом системе координат пространственного положения центра масс, моментов инерции вертолета в полете и значение параметра продольного расстояния от центра масс вертолета до оси несущего винта (ЦМ) 32 на первый вход блока расчета прогнозируемой скорости полета вертолета (ПС) 31 поступает параметр текущего значения (XT(t)) продольного расстояния от оси несущего винта до центра масс вертолета.
С выхода блока автопилота функций автоматической стабилизации (АС) 25 на второй вход блока расчета прогнозируемой скорости полета вертолета (ПС) 31 через переключатель блоков автопилота функций автоматической стабилизации по тангажу, высоте, скорости, крену и курсу (вАП) 23 при работе системы автоматического управления полетом в директорном режиме ручного управления поступает параметр: (υ°тек) текущее значение угла тангажа.
С выхода блока расчета прогнозируемой скорости полета вертолета (ПС) 31 поступает параметр заданной скорости полета вертолета (Узад) и далее через вход блока командно-пилотажного индикатора (КПИ) 9 на вход блока (БУС) 41 вместе параметром текущей скорости полета вертолета (Утек) поступают для индикации на навигационном поле 2 экрана 1 указателя скорости (УС) 37.
В блоке системы автоматического управления полетом (САУП) 10 на переключатель блоков автопилота функций автоматической стабилизации по тангажу, высоте, скорости, крену и курсу (вАП) 23 поступают: υ°тек - текущее значение угла тангажа, Yтек - текущее значение высоты полета вертолета, Vтек - текущее значение скорости полета вертолета, γ°тек - текущее значение угла крена и ψ°тек - текущее значение угла поворота траектории.
При положении переключателя блоков автопилота функций автоматической стабилизации по тангажу, высоте, скорости, крену и курсу (вАП) 23 в положении "0-2", (что соответствует включенному автопилоту) с выхода блока автопилота функций автоматической стабилизации (АС) 25 в блок системы автоматического управления полетом (САУП) 10 поступают стабилизированные параметры полета: из блока автопилота функции стабилизации по тангажу (Aυ) 26 заданное значение угла тангажа (υ°зад), из блока автопилота функции стабилизации по высоте (Ан) 27 заданное значение высоты полета вертолета (Yзад), из блока автопилота функции стабилизации по скорости (Av) 28 заданное значение скорости полета вертолета (Vзад), из блока автопилота функции стабилизации по крену (Аγ) 29 заданное значение угла крена (γ°зад), из блока автопилота функции стабилизации по курсу (Аψ) 30 заданное значение угла поворота траектории (курса) (ψ°зад).
При положении переключателя блоков автопилота функций автоматической стабилизации по тангажу, высоте, скорости, крену и курсу (вАП) 23 в положении "0-1" (что соответствует режиму ручного управления полетом) в блок системы автоматического управления полетом (САУП) 10 поступают параметры: (υ°тек) - текущее значение угла тангажа, (Yтек) - текущее значение высоты полета вертолета, (Vтек) - текущее значение скорости полета вертолета:, (γ°тек) - текущее значение угла крена и (ψ°тек) - текущее значение угла поворота траектории.
Из блока системы автоматического управления полетом (САУП) 10 на вход блока вычисления начальных условий для траекторного вычислителя (НУ ТВ) 43 поступают параметры:
(с выхода ЦМ 32) текущей массы вертолета - (Мв), координат текущего центра масс вертолета в связанной с вертолетом системе координат - (хв, ув, zв), текущего значения (Xт(t)) продольного расстояния от оси несущего винта до центра масс вертолета, величины моментов инерции вертолета в полете (Iххв, Iуув, Izzв, Iхув, Ixzb, Iуzв),
(с выхода ИНС 12) параметры углового и пространственного положения вертолета: (υ°тек, γ°тек, ϕ°тек), соответственно, текущее значение угла тангажа, текущее значение угла крена, текущее значение угла рыскания и (Хтек) - текущее значение дальности полета вертолета, (Zтек) - текущее боковое отклонении вертолета.
(с выхода СВС 11) текущего значения высоты полета вертолета - (Yтек), текущего значения скорости полета вертолета - (Vтек), текущей проекции вектора вертикальной скорости вертолета - Vygтек и текущих горизонтальных проекций вектора средней скорости ветра в земной системе координат -(Wind=f (Wxg, Wzg)). (где: Wind - модуль текущего вектора средней скорости ветра, (Wxg, Wzg) - горизонтальные проекции вектора средней скорости ветра в (Wind тек) в земной системе координат).
Поступающие параметры пересчитываются в блоке (НУ ТВ) 43 в параметры начальных условий для решения системы дифференциальных уравнений динамики пространственного движения реального вертолета и поступают на вход блока траекторного вычислителя (ТВ) 42:
- аэродинамические характеристики вертолета (на фиг. 1 не показаны);
- линейные размеры реального вертолета (на фиг. 1 не показаны);
- начальное время интегрирования системы дифференциальных уравнений динамики пространственного движения реального вертолета - (То=0.0) (на фиг. 1 не показано);
- параметр текущей массы вертолета - (Мв);
- координаты текущего центра масс вертолета в связанной с вертолетом системе координат - (хв, ув, zв);
- текущее значение (Xт(t)) продольного расстояния от оси несущего винта до центра масс вертолета;
- моменты инерции вертолета в полете (Iххв, Iуув, Izzв, Iхув, Ixzb, Iуzв);
- проекции вектора текущей скорости полета вертолета в земной системе координат: (Vxgтек, Vygтек, Vzgтек);
- координаты пространственного положения центра масс вертолета в земной системе координат: (Хтек, Yтек, Zтек);
- предельно-минимальная высота полета вертолета при выходе из вертикального нисходящего маневра соосного вертолета - (Yпр);
- текущее значение угла тангажа (υ°тек), угла рыскания (ϕ°тек); угла крена (γ°тек);
- текущее значение проекций вектора угловой скорости вертолета в связанной системе координат (ωx тек, ωy тек, ωz тек);
- текущее значение угла поворота траектории полета вертолета и угла наклона траектории, соответственно: (ψ°тек, Θ°тек);
- модуль текущего вектора средней скорости ветра, в земной системе координат - (Wind).
С первого выхода блока траекторного вычислителя (ТВ) 42 (фиг. 1) в блок системы автоматического управления полетом (САУП) 10 поступают вычисленные результаты интегрирования системы дифференциальных уравнений пространственного движения вертолета:
- проекции вектора скорости полета вертолета на оси земной системы координат: (Vxa, Vya, Vza);
- пространственное положение центра масс вертолета в осях земной системы координат (дальность, высота, боковое отклонение, соответственно): Ха, Ya, Za;
- проекции вектора угловой скорости вертолета в осях связанной системы координат (ωxa, ωya, ωza);
- модуль вектора угловой скорости вращения вертолета (Ωa=√(ωxa2+ωya2+ωza2));
- значение угла тангажа, угла рыскания, угла крена, соответственно, (υ°a, ϕ°а, γ°а);
- значение угла поворота траектории - (ψ°а);
- значение угла наклона траектории - (Θ°а);
Со второго выхода блока траекторного вычислителя (ТВ) 42 (фиг. 1, фиг. 2) на первый вход блока подготовки для визуализации индекса "Самолет" в вертикальном нисходящем маневре соосного вертолета (ВМ) 40 поступает вычисленное значение параметра полета вертолета в вертикальном нисходящем маневре соосного вертолета: пространственное положение центра масс вертолета по высоте в осях земной системы координат - (Ya).
С выхода блока подготовки к визуализации индекса "Самолет" в вертикальном нисходящем маневре соосного вертолета (ВМ) 40 (фиг. 1) на первый вход блока логических переключателей (ЛП) 44 поступает вычисленное пространственное положение центра масс вертолета по высоте в осях земной системы координат (Ya).
Выход блока объемной геометрической формы индекса "Самолет" (ГФ) 39 соединен (фиг. 1) с входом блока системы автоматического управления полетом (САУП) 10 по параметрам:
- координат точек описывающих геометрию объемного индекса «Самолет», визуализируемого на индикационном поле 3 экрана 1 в вертикальном нисходящем маневре соосного вертолета:
- координата крайней точки левого крыла - L(x1, у1, z1),
- координата крайней точки правого крыла - R(x1, у1, z1),
- координата крайней верхней точки киля - U(x1, у1,z1),
- координата крайней нижней точки киля - В(х1, у1, z1),
- координата передней носовой точки - N(x1 y1, z1),
- координатам центра индикационного поля 3 экрана 1 - (Yс, Zc);
- величины предельно-минимальной высоты полета вертолета при выходе из вертикального нисходящего маневра соосного вертолета - (Yпр);
- величины предельно-минимального значения угла тангажа - (υ°пр).
На второй вход блока логических переключателей (ЛП) 44 (фиг. 1, фиг. 2) из блока системы автоматического управления полетом (САУП) 10 поступают параметры: предельно-минимального значения угла тангажа (υ°пр), предельно-минимальной высота полета вертолета при выходе из вертикального нисходящего маневра соосного вертолета (Yпр) и текущее значение параметра полета вертолета: угол тангажа (υ°тек).
На второй вход блока подготовки для визуализации индекса "Самолет" в вертикальном нисходящем маневре соосного вертолета (ВМ) 40 поступают: - координаты точек, описывающих геометрию объемного индекса «Самолет», визуализируемого на индикационном поле 3 экрана 1 в вертикальном нисходящем маневре соосного вертолета.
- координата крайней точки левого крыла - L(x1, у1, z1),
- координата крайней точки правого крыла - R(x1, у1, z1),
- координата крайней верхней точки киля - U(x1, у1, z1),
- координата крайней нижней точки киля - В(х1, y1, z1),
- координата передней носовой точки - N(x1 у1, z1),
- координатам центра индикационного поля 3 экрана 1 - (Yc, Zc);
- текущее значение угла поворота траектории полета вертолета (ψ°тек);
- координата пространственного положения центра масс вертолета в земной системе координат по боковому отклонению (Zтек);
- текущее значение угла тангажа (υ°тек), угла рыскания (ϕ°тек); угла крена (γ°тек).
С первого выхода блока логических переключателей (ЛП) 44 в блок системы автоматического управления полетом (САУП) 10 (фиг. 1, фиг. 2) через включенный переключатель (ПВМ) 45 поступают параметры, индицирующие на индикационном поле 3 экрана 1 вертикальный нисходящий маневр соосного вертолета.
Со второго выхода блока логических переключателей (ЛП) 44 в блок системы автоматического управления полетом (САУП) 10 (фиг. 1, фиг. 2) через включенный переключатель (ПСЛ) 46 поступают параметры, индицирующие на индикационном поле 3 экрана 1 индекс «Самолет» 5 и индекс «Лидер» 4.
Работа командно-пилотажного индикатора начинается с того, что летчик при подготовке к полету, устанавливает переключатель ввода исходных данных параметров программной трехмерной траектории полета вертолета (В) 34 (фиг. 1) в положение «ввод исходных данных параметров программной трехмерной траектории полета вертолета». В блок навигационного вычислителя исходных данных (НВ ИД) 13 летчик вводит параметры программной трехмерной траектории полета и инерционно-массовые характеристики вертолета, подготовленные к обработке в пространстве земной системы координат. Одновременно в блок системы автоматического управления полетом (САУП) 10 поступают из блока объемной геометрической формы индекса "Самолет" (ГФ) 39 параметры, визуализирующие объемный индекс «Самолет» на индикационном поле 3 экрана 1 в вертикальном нисходящем маневре соосного вертолета: координату крайней точки левого крыла (L(x1, y1, z1)), координату крайней точки правого крыла (R(x1, y1, z1)), координату крайней верхней точки киля (U(x1, y1, z1)), координату крайней нижней точки киля (B(x1, y1, z1)), координату передней носовой точки вертолета (N(x1, y1, z1)), координаты центра индикационного поля 3 экрана 1 (Yc, Zc), величину предельно-минимальной высоты полета вертолета при выходе из вертикального нисходящего маневра соосного вертолета (Yпр), величину предельно-минимального значения угла тангажа (υ°пр). После ввода исходных данных, летчик переводит переключатель ввода исходных данных параметров программной трехмерной траектории полета вертолета (В) 34 (фиг. 1) в положение, которое соответствует команде «ввод данных прекращен». По этой команде на вход блока навигационного вычислителя расчетных данных (НВ РД) 14 поступают все исходные данные параметров программной трехмерной траектории полета вертолета и инерционно-массовые характеристики вертолета с выхода блока навигационного вычислителя исходных данных (НВ ИД) 13. В блоке навигационного вычислителя расчетных данных (НВ РД) 14 исходные данные параметров трехмерной программной траектории полета и инерционно-массовые характеристики вертолета пересчитываются в дополнительно задаваемые параметры полета вертолета, которые необходимы для управления полетом вертолета и для работы блока системы автоматического управления полетом (САУП) 10. На маршруте полета в дирек-торном режиме автоматического управления полетом (фиг. 1) на вход блока системы автоматического управления полетом (САУП) 10 постоянно поступают сигналы с выходов основных систем вертолета: блока системы воздушных сигналов (СВС) 11, блока инерциальной навигационной системы (ИНС) 12, блока навигационного вычислителя исходных данных (НВ ИД) 13, блока навигационного вычислителя расчетных данных (НВ РД) 14, блока учета расхода в полете массы полезной нагрузки вертолета (РПН) 33, блока вычисления в связанной с вертолетом системе координат пространственного положения центра масс, моментов инерции вертолета в полете и значение параметра продольного расстояния от центра масс вертолета до оси несущего винта (ЦМ) 32. Рабочие параметры блока (ЦМ) 32, в котором определяется в текущий момент времени: Мв (t, хв, ув, zb) - текущая масса вертолета, (t) - время полета, (хв, ув, zb) - координаты текущего центра масс вертолета в связанной с вертолетом системе координат, текущее значение (Xт(t)) продольного расстояния от оси несущего винта до центра масс вертолета и величины моментов инерции вертолета в полете (Iххв, Iуув, Izzb, Iхув, Ixzb, Iуzв), которые используются в блоке системы автоматического управления полетом (САУП) 10 для управления полетом вертолета. С выхода блока системы автоматического управления полетом (САУП) 10 параметры поступают в блок командно-пилотажного индикатора (КПИ) 9, где в блоке генератора символов (ГС) 15 преобразуются в управляющие индексы параметров полета и выводятся на экран 1. По визуальной информации летчик контролирует полет в директорном режиме автоматического управления полетом по индексам «Лидер» 4 и «Самолет» 5 и навигационным приборам, визуализирующим параметры горизонтального полета на маршруте: углу поворота траектории (ψ°тек=ψ°зад), указателю вертикальной скорости и другие. В заявляемом предложении не нарушается приборная последовательность действий летчика, исполняющего команду перехода на новую скорость в горизонтальном полете, поэтому в горизонтальном полете переход с одной скорости на другую, будет определяться динамическими свойствами присущими только вертолету, для которого величина скорости полета зависит от угла наклона плоскости вращения несущего винта. Летчик, изменяя скорость полета, обращает внимание на указатель скорости полета вертолета (УС) 37, отмечая взглядом текущую скорость полета. Затем, летчик переключателем блоков автопилота функций автоматической стабилизации по тангажу, высоте, скорости, крену и курсу (вАП) 23 (фиг. 1), отключает в блоке автопилота функций автоматической стабилизации (АС) 25 блок автопилота функции стабилизации по тангажу (Aυ) 26, блок автопилота функции стабилизации по высоте (Ан) 27, блок автопилота функции стабилизации по скорости (Av) 28, блок автопилота функции стабилизации по крену (Аγ) 29 и блок автопилота функции стабилизации по курсу (Аψ) 30. Тем самым летчик переводит систему управления вертолетом в директорный режим ручного управления полетом по углу тангажа, высоте и скорости полета, крену и курсу не отключая работу других основных систем вертолета. В следующий момент летчик органами управления (ОУ) 24 изменяет угол тангажа вертолета. Изменяя угол тангажа, летчик изменяет величину скорости полета вертолета. Этот маневр фиксируется основными системами вертолета и, в параметрическом виде (через протоколы обмена), передается в блок системы автоматического управления полетом (САУП) 10. Из протокола обмена данных, поступающих с выхода блока инерциальной навигационной системы (ИНС) 12, выбирается только один параметр (υ°тек) (текущий угол тангажа), который передается на вход блока расчета прогнозируемой скорости полета вертолета (ПС) 31. На другой вход блока расчета прогнозируемой скорости полета вертолета (ПС) 31 постоянно поступает значение параметра (Xт(t)) продольное расстояние от центра масс вертолета до оси несущего винта. В блоке расчета прогнозируемой скорости полета вертолета (ПС) 31 по аналитическим формулам вычисляется числовое значение функциональной зависимости прогнозируемой скорости полета вертолета (Vзад=Vпр=f(υтек,Xт(t)=const)) для горизонтального участка маршрута, которая будет являться балансировочной скоростью. Балансировочная скорость горизонтального полета вертолета соответствует скорости полета вертолета, при которой сумма всех внешних сил и моментов, действующих на вертолет в полете равна нулю. Балансировочную скорость полета вертолет достигает не сразу (из-за инерционности массы вертолета), а спустя некоторое время, после того как уравновесятся все действующие на вертолет внешние силы и моменты. Изменение летчиком угла тангажа вертолета осуществляется до тех пор, пока индекс заданной скорости полета вертолета (48) (фиг. 3) не установится на шкале прибора указателя скорости полета вертолета (УС) 37 на новое цифровое значение заданной скорости полета на горизонтальном участке маршрута. В этот момент времени летчик переключателем блоков автопилота функций автоматической стабилизации по тангажу, высоте, скорости, крену и курсу (вАП) 23 (фиг. 1), включает в работу в блоке автопилота функций автоматической стабилизации (АС) 25 блок автопилота функции стабилизации по тангажу (Aυ) 26, блок автопилота функции стабилизации по высоте (Ан) 27, блок автопилота функции стабилизации по скорости (Av) 28, блок автопилота функции стабилизации по крену (Аγ) 29 и блок автопилота функции стабилизации по курсу (Аψ) 30. Тем самым летчик возвращает систему управления вертолетом в директорный режим автоматического управления полетом с новыми параметрами стабилизации по углу тангажа, высоте, скорости, крену и курсу полета. Прогнозируемая скорость полета вертолета в (БУС) 41 в директорном режиме автоматического управления полетом не вычисляется, т.к. она является стабилизируемым параметром в блоке автопилота функции стабилизации по скорости (Av) 28. В результате этих действий, летчик увидит на индикационном поле 3 экрана 1 изменившуюся фигуру «Лидера» 4, соответствующую (Vзад), вычисленной в (БУС) 41 и на навигационном поле 2 экрана 1 указатель скорости полета вертолета (УС) 37, на числовой шкале которого отмечены значение индекса указателя заданной скорости полета вертолета (48) и значение индекса указателя текущей скорости полета вертолета (49). Значения индекса указателя заданной скорости полета вертолета (48) и значения индекса указателя текущей скорости полета вертолета (49) (фиг. 3) будут показывать разные числовые значения, т.к. в этот момент времени балансировочная скорость не равна заданной скорости полета вертолета. В момент перехода на директорный режим автоматического управления полетом, из протоколов обмена текущих выходных параметров полета с выхода блока системы автоматического управления полетом (САУП) 10 выбирается последний протокол обмена текущих значений выходных параметров полета: время полета на маршруте (Т), текущее значение дальности полета ЛА (Хтек), текущее значение высоты полета вертолета - (Нтек), текущее боковое отклонении вертолета (Zтек), программно задаваемая высота полета вертолета на исполнение команды «убрать шасси»/«выпустить шасси» (Ншас), заданная скорость полета вертолета (Vзад), текущее значение угла тангажа (υ°тек), инерционно-массовые характеристики (Ixx, Iyy, Izz, Ixy, Ixz, Iyz) вертолета для связанной системы координат. С этого момента времени, последний протокол обмена текущих значений выходных параметров полета является параметрическим описанием начальных условий инерционно-массового и пространственного положения вертолета в данной точке маршрута, с которой будет вычислена задаваемая вновь опорная трехмерная траектория полета вертолета до конечного пункта маршрута с заданной скоростью полета вертолета (Vзад) (равной скорости, выбранной для дальнейшего полета по маршруту в блоке расчета прогнозируемой скорости полета вертолета (ПС) 31). Вычисление задаваемой вновь опорной трехмерной траектории полета вертолета осуществляется в блоке навигационного вычислителя исходных данных (НВ ИД) 13 и блоке навигационного вычислителя расчетных данных (НВ ИД) 14. Блок автопилота функций автоматической стабилизации (АС) 25 принимает вновь задаваемые значения параметров полета на маршруте по высоте, скорости, углу тангажа, углу крена и углу курса, как начальные условия для их стабилизации. Дальнейший директорный режим автоматического полета своего вертолета летчик контролирует, наблюдая на индикационном поле 3 экрана 1 изменение положения и формы геометрических фигур индексов «Лидер» 4 и «Самолет» 5, а на навигационном поле 2 экрана 1 в указателе скорости полета вертолета (УС) 37 летчик наблюдает, как перемещается по числовой шкале индекс текущей скорости полета (49) к новому числовому значению заданной скорости (Vзад), на которое указывает индекс заданной скорости полета вертолета (48). Геометрический размер индекса «Лидер» 4 будет изменяться в зависимости от величины отклонения текущей скорости полета вертолета относительно величины заданной скорости полета (Vзад). Разность скоростей (ΔV=(Vзад-Vтек)) определяет коэффициент масштаба скорости полета ЛА (mV) из блока вычисления коэффициента скорости полета вертолета (19). Когда текущее значение вектора скорости ЛА (Vтек) меньше программно заданного вектора скорости ЛА (Vзад), индекс "Лидер" 4 уменьшится в размерах "удалится". Когда текущее значение вектора скорости ЛА (Vтек) больше программно заданного вектора скорости ЛА (Vзад), индекс "Лидер" 4 увеличится в размерах "приблизится". При позиции переключателя блоков автопилота функций автоматической стабилизации по тангажу, высоте, скорости, крену и курсу (вАП) 23 в положение «0-2» «директорное автоматическое управление» при условии текущего значения вектора скорости ЛА (Vтек) меньше программно заданного вектора скорости ЛА (Vзад) индекс "Лидер" 4 будет увеличиваться в размерах при увеличении текущей скорости полета вертолета. При значении текущего значения вектора скорости ЛА (Vтек) больше программно заданного вектора скорости ЛА (Vзад) индекс "Лидер" 4 будет уменьшаться в размерах при уменьшении текущей скорости полета вертолета. Выполняя полетное задание, летчик в режиме директорного автоматического управления полетом держит (фиг. 1) переключатель блоков автопилота функций автоматической стабилизации по тангажу, высоте, скорости, крену и курсу (вАП) 23 в позиции «0-2» и контролирует полет (фиг. 3) на индикационном поле 3 экрана 1 по индексам «Самолет» 5 и «Лидер» 4 и по навигационным приборам на навигационном поле 2 экрана 1, таким как: указатель скорости (37), указатель вертикальной скорости полета (вариометр) (38), указатель курса (7), контролируя высоту полета по «шкале высоты» (6) и индексу «радиовысота» (8) и другим приборам (на фиг. 3 не показано).
Если в полете возникнет необходимость экстренного снижения с высоты в несколько километров до уровня предельно-минимальной высоты полета вертолета (Yпр) за минимально возможное время, то есть выполнить пространственный вертикальный нисходящий маневр соосного вертолета, то в этом случае, летчик отключает директорное автоматическое управление полетом вертолета, переводит переключатель блоков автопилота функций автоматической стабилизации по тангажу, высоте, скорости, крену и курсу (вАП) 23 в позицию «0-1» (фиг. 1). Одновременно летчик видит на индикационном поле 3 экрана 1, что индекс «Лидер» 4 слился с индексом «Самолет» 5 в одну геометрическую фигуру: индекс «Самолет». (Индекс «Лидер» 4 выйдет за пределы геометрической фигуры индекса «Самолет» 5 при выходе из вертикального нисходящего маневра соосного вертолета или при возникновении любого прогнозируемого опасность параметра полета).
Летчик органами управления (ОУ) 24 выводит вертолет в около нулевую воздушную скорость. Далее, полный сброс общего шага и ручкой управления доведение текущего угла тангажа до величины близкой к вертикальной (υ°тек = -90°) (продольная ось фюзеляжа (oX1) вертикально к земле) и ручкой управления (ОУ 24) создает (чтобы видеть плоскости вращения несущих винтов) левое вращение фюзеляжа относительно (ωx1) его продольной оси. При этом воздушная скорость вертикального к земле полета (падения) энергично возрастает, но рост воздушной скорости можно уменьшить, увеличивая частоту вращения фюзеляжа. Установившаяся воздушная скорость поддается и уменьшению при дальнейшем увеличении частоты вращения фюзеляжа. Основные системы вертолета: - блок системы воздушных сигналов (СВС) 11, - блок инерциальной навигационной системы (ИНС) 12, - блок навигационного вычислителя исходных данных (НВ ИД) 13, - блок навигационного вычислителя расчетных данных (НВ РД) 14, - блок вычисления в связанной с вертолетом системе координат пространственного положения центра масс, моментов инерции вертолета в полете и значение параметра продольного расстояния от центра масс вертолета до оси несущего винта (ЦМ) 32 и - блок учета расхода в полете массы полезной нагрузки вертолета (РПН) 33 продолжают посылать параметрические сигналы в блок системы автоматического управления полетом (САУП) 10. В блоке системы автоматического управления полетом (САУП) 10 параметры полета вертолета поступают (фиг. 1) на вход блока начальных условий траекторного вычислителя (НУ ТВ) 43, из которых формируется протокол обмена для блока траекторного вычислителя (ТВ) 42, чтобы получать вычисляемые аналитически параметры полета вертолета. Блок траекторного вычислителя (ТВ) 42 работает постоянно от момента взлета вертолета до момента посадки вертолета в директорном режиме как ручного, так и автоматического управления. В блоке траекторного вычислителя (ТВ) 42 интегрируется система дифференциальных уравнений динамики пространственного движения реального вертолета, который имеет реальные аэродинамических характеристики, соответствующие данной модели вертолета, и реальные линейные размеры вертолета от центра масс вертолета до точек приложения всех действующих на вертолет внешних сил. Решением системы дифференциальных уравнений динамики пространственного движения реального вертолета для интервала времени интегрирования (ΔT=(Тк-То)) (фиг. 1) являются вычисленные значения параметров траектории полета: - пространственное положение центра масс вертолета в осях земной системы координат реального вертолета (Ма) вычисленные в земной системе координат: вдоль оси (Xg)→(Ха); вдоль оси (Yg)→(Ya); вдоль оси (Zg)→(Za), проекции скорости центра масс реального вертолета в земной системе координат: вдоль оси (Xg)→(Vxa); вдоль оси (Yg)→(Vya); вдоль оси (Zg)→(Vza), проекции вектора угловой скорости относительно центра масс реального вертолета в связанной вертолетом системе координат oX1Y1Z1: вдоль оси (X1)→(ωха); вдоль оси (Y1)→(ωуа); вдоль оси (Z1)→(ωza), модуль угловой скорости вращения вертолета (Ωa=√(ωxa2+ωуа2+ωza2)), вектор углового положения связанной системы координат oX1Y1Z1 реального вертолета относительно земной системы координат oXgYgZg: угол тангажа (υ°а); угол рыскания (ϕ°а); угол крена (γ°а), угол поворота траектории полета (ψ°a), угол наклона траектории полета (Θ°а). В расчетах матрица связанной системы координат при переходе к земной системе координат зависит от текущих углов: угла рыскания (ϕ°тек), угла тангажа (υ°тек), угла крена (γ°тек). Блок траекторного вычислителя (ТВ) 42 передает в блок подготовки к визуализации индекса "Самолет" 5 в вертикальном нисходящем маневре соосного вертолета (ВМ) 40, вычисленное значение параметра траектории полета вертолета - пространственное положение центра масс вертолета по высоте в осях земной системы координат (Ya). Совокупность параметров вычисленного значения пространственного положения центра масс вертолета по высоте в осях земной системы координат (Ya), параметра предельно-минимальной высоты полета вертолета при выходе из вертикального нисходящего маневра соосного вертолета (Yпр), параметра предельно-минимального угла тангажа (υ°пр), координат крайних точек элементов поверхностей объемного индекса «Самолет», описываемого массивом значений (L, R, U, В, N) все вместе визуально представляют пространственное и угловое движение реального вертолета на индикационном поле 3 экрана 1 в блоке командно-пилотажного индикатора (КПИ) 9. Отмечаем, что в блоке подготовки к визуализации индекса "Самолет" в вертикальном нисходящем маневре соосного вертолета (ВМ) 40 при визуализации пространственного вертикального нисходящего маневра соосного вертолета на индикационном поле 3 экрана 1 в матрице связанной системы координат текущий угол рыскания (ϕ°тек), заменяется на текущий угол поворота траектории (ψ°тек).
Переход на визуализацию пространственного движения в вертикальном нисходящем маневре соосного вертолета происходит в блоке логических переключателей (ЛП) 44 (фиг. 6), в котором одновременно сравниваются значения входной величины текущего угла тангажа (υ°тек) со значением величины предельно-минимального угла тангажа (υ°пр) и значения вычисленного пространственное положения центра масс вертолета в осях земной системы координат по высоте (Ya) со значением величины предельно-минимальной высоты полета вертолета при выходе из вертикального нисходящего маневра соосного вертолета (Yпр).
Если удовлетворяется условие (υ°тек) ≤ (υ°пр), при котором (фиг. 6) значение входной величины текущего угла тангажа (υ°тек) меньше или равно значению величины предельно-минимального угла тангажа (υ°пр), и, одновременно, удовлетворяется условие (Ya) ≥ (Yпр), при котором значение вычисленного пространственного положения центра масс вертолета в осях земной системы координат по высоте (Ya) больше или равно значению величины предельно-минимальной высоты полета вертолета при выходе из вертикального нисходящего маневра соосного вертолета (Yпр), то включается переключатель (ПВМ) 45. С выхода блока системы автоматического управления полетом (САУП) 10 поступают параметры в блок командно-пилотажного индикатора (КПИ) 9, в котором в блоке генератора символов (ГС) 15 (фиг. 7) блок, индицирующий на индикационном поле 3 экрана 1 объемный индекс "Самолет" в вертикальном нисходящем маневре соосного вертолета (ИВМ) 47, визуализирует элементы поверхностей объемного индекса «Самолет», описываемого массивом значений (L, R, U, В, N). Одновременно выключается переключатель (ПСЛ) 46 и отключаются: блок, индицирующий на индикационном поле 3 экрана 1 подвижный индекс неуправляемый летчиком "Лидер" 4, и блок, индицирующий на индикационном поле 3 экрана 1 подвижный индекс управляемый летчиком "Самолет" 5.
Если, в данный момент времени, удовлетворяется условие, при котором (υ°тек) ≤ (υ°пр) значение входной величины текущего угла тангажа (υ°тек) меньше или равно значению величины предельно-минимального угла тангажа (υ°пр), и, одновременно в данный момент времени значение вычисленного пространственного положения центра масс вертолета в осях земной системы координат по высоте (Ya) меньше значения величины предельно-минимальной высоты полета вертолета при выходе из вертикального нисходящего маневра соосного вертолета (Yпр), то есть (Ya) < (Yпр); Или в данный момент времени значение входной величины текущего угла тангажа (υ°тек) больше значения величины предельно-минимального угла тангажа (υ°пр), то есть (υ°тек) > (υ°пр), и, одновременно, значение вычисленного пространственного положения центра масс вертолета в осях земной системы координат по высоте (Ya) больше или равно значения величины предельно-минимальной высоты полета вертолета при выходе из вертикального нисходящего маневра соосного вертолета (Yпр), то есть (Ya) ≥ (Yпр); Или в данный момент времени значение входной величины текущего угла тангажа (υ°тек) больше значения величины предельно-минимального угла тангажа (υ°пр), то есть (υ°тек) > (υ°пр), и, одновременно, значение вычисленного пространственного положения центра масс вертолета в осях земной системы координат по высоте (Ya) меньше значения величины предельно-минимальной высоты полета вертолета при выходе из вертикального нисходящего маневра соосного вертолета (Yпр), то есть (Ya) < (Yпр), то включается переключатель (ПСЛ) 46. С выхода блока системы автоматического управления полетом (САУП) 10 поступают параметры в блок командно-пилотажного индикатора (КПИ) 9 и далее в блок генератора символов (ГС) 15 на блок, индицирующий на индикационном поле 3 экрана 1 подвижный индекс неуправляемый летчиком "Лидер" 4 и на блок, индицирующий на индикационном поле 3 экрана 1 подвижный индекс управляемый летчиком "Самолет" 5. На индикационном поле 3 экрана 1 визуализируются индекс «Лидер» 4 и индекс «Самолет» 5. Одновременно выключается (фиг. 2) переключатель (ПВМ) 45 и выключается блок, индицирующий на индикационном поле 3 экрана 1 объемный индекс "Самолет" в вертикальном нисходящем маневре соосного вертолета (ИВМ) 47.
Летчик при управлении в ручном режиме выхода из вертикального нисходящего маневра соосного вертолета плавно берет ручку управления на себя с одновременным плавным уменьшением частоты вращения фюзеляжа, что приводит к увеличению тангажа, появлению и увеличению радиуса расходящейся нисходящей спирали и уменьшению воздушной скорости полета. При продолжении увеличения радиуса и уменьшении скорости, вертолет переходит в режим близкий к авторотационному на широкой нисходящей спирали. Только после этого (очень важно) рычаг общего шага снимается с нижнего упора и используется для дальнейшего полетного расчета. Для полного и безопасного вывода из этого режима требуется 200-250 метров высоты.
Для пояснения работы блока подготовки к визуализации индекса "Самолет" в вертикальном нисходящем маневре соосного вертолета (ВМ) 40 раскрываем последовательность визуализация задаваемого изображения объемного индекса "Самолет" в проекции на плоскость индикационного поля 3 экрана 1 (КПИ) 9 в зависимости от пространственного и углового положения реального вертолета. Для этого в блоке подготовки к визуализации индекса "Самолет" в вертикальном нисходящем маневре соосного вертолета (ВМ) 40 вычисляются дополнительные переменные: индекс пространственного положения «I» и индекс последовательного вывода «J», которые позволяют выводить элементы поверхностей объемного индекса «Самолет», описываемого массивом значений (L, R, U, B, N), в проекции на плоскость индикационного поля 3 экрана 1 в зависимости от величин: текущего угла поворота траектории (ψ°тек), текущего угла тангажа (υ°тек), текущего угла крена (γ°тек). Вывод на индикационное поле 3 экрана 1 изображение объемного индекса "Самолет" в вертикальном нисходящем маневре соосного вертолета осуществляется (фиг. 6) переключателем (ПВМ) 45. Блок подготовки к визуализации индекса "Самолет" в вертикальном нисходящем маневре соосного вертолета (ВМ) 40 состоит из отдельных блоков (фиг. 8).
«S01» - блок констант и начальных значений углового положения вертолета.
«S02» - блок приема входных значения текущих параметров полета вертолета (ψ°тек, υ°тек, γ°тек), параметра предыдущего значения входной текущей величины ψ°п), координат центра (Yc, Zc) индикационного поля 3 экрана 1.
«S03» - блок графического вывода элементов поверхностей объемного индекса «Самолет» в проекцию на индикационное поле экрана.
«S04» - блок пересчета точек элементов поверхностей объемного индекса «Самолет», заданного массивом (L, R, U, B, N), в соответствии с текущими значениями углов крена, рыскания, тангажа (γ°тек, ϕ°тек, υ°тек).
«S05» - блок определения разности между текущим значением угла поворота траектории (ψ° тек) и предыдущим (ψ°п) значением угла поворота траектории вертолета.
«S06» - блок математического построения элементов поверхностей объемного индекса «Самолет».
«S07» - блок вычисления индекса пространственного положения «I».
«S08» - блок математической сборки элементов поверхностей объемного индекса «Самолет», в соответствии с вычисленным индексом последовательного вывода (J).
«S09» блок последовательного вывода элементов поверхностей объемного индекса «Самолет», в соответствии с вычисленным индексом последовательного вывода (J).
«S10» - блок переименования параметра параметра текущего значения угла поворота траектории (ψ°тек) в параметр предыдущего значения (ψ°п=ψ°тек) и передача параметра предыдущего значения в блок «S02».
При работе блока подготовки к визуализации индекса "Самолет" в вертикальном нисходящем маневре соосного вертолета (ВМ) 40 выделяются три основных этапа:
1). Математическое построение элементов поверхностей объемного индекса «Самолет» в земной системе координат блоками «S02», «S04», «S06», «S08».
2). Определение последовательного вывода элементов поверхностей объемного индекса «Самолет» в соответствии с индексом пространственного положения (I) и индексом последовательного вывода (J) в блоках «S02», «S05», «S07», «S09».
3). Математическая сборка элементов поверхности объемного индекса «Самолет» на индикационное поле 3 экран 1 (КПИ) 9 и вывод проекции изображения блок «S03».
Работа блока подготовки к визуализации индекса "Самолет" в вертикальном нисходящем маневре соосного вертолета (ВМ) 40 начинается с момента ввода начальных условий в блок системы автоматического управления полетом (САУП) 10. На вход блока «S01» с выхода блока системы автоматического управления полетом (САУП) 10 (фиг. 8) поступают начальные значения: текущего угла поворота траектории (ψ°тек), текущего угла тангажа (υ°тек), текущего угла крена (γ°тек), координаты центра индикационного поля 3 экрана 1 (Yс, Zc). Константы (Yс, Zc) используются в работе блока (ВМ) 40 без изменения. Блок «S01» работает один раз и только при вводе начальных данных из блока системы автоматического управления полетом (САУП) 10. В блоке «S01» введенные параметры начальных значений углового положения вертолета переименовываются в параметры предыдущих значений («предыдущее значение» - это название одноименного параметра на предыдущем шаге вычисления) текущих параметров углового положения вертолета : значение угла поворота траектории - (ψ°п=ψ°тек), значение угла тангажа - (υ°п=υ°тек), значение угла крена - (γ°п=γ°тек).
С выхода блока «S01» на первый вход блока «S02» (фиг. 8) поступают предыдущие параметры текущих величин (ψ°п, υ°п, γ°п): угол поворота траектории (ψ°п=ψ°тек), угол тангажа (υ°п=υ°тек), угол крена (γ°п=γ°тек), элементы поверхностей объемного индекса «Самолет» заданного массивом (L, R, U, B, N), координаты центра индикационного поля 3 экрана 1 (Yс, Zc).
На второй вход блока «S02» с выхода блока системы автоматического управления полетом (САУП) 10 поступают текущие значения параметров полета (ψ°тек, υ°тек, ϕ°тек, γ°тек) : угол поворота траектории (ψ°тек), угол тангажа (υ°тек), угол рыскания (ϕ°тек), угол крена (γ°тек).
С первого выхода блока «S02» на вход блока «S04» (фиг. 8, фиг. 9) поступают текущие значения параметров углового положения вертолета в пространстве: угол тангажа (υ°тек), угол рыскания (ϕ°тек), угол крена (γ°тек). В блоке «S04» пересчитываются координаты точек элементов поверхности объемного индекса «Самолет», заданного массивом (L, R, U, B, N), по матрице перехода от связанной с вертолетом (oX1Y1Z1) системы координат (фиг. 4) к земной системе координат (oXgYgZg) в соответствии с текущими значениями углов тангажа, рыскания, крена (υ°тек, ϕ°тек, γ°тек).
Со второго выхода блока «S02» на вход блока «S05» (фиг. 8) поступают: текущее значение угла поворота траектории (ψ°тек) и предыдущее значение параметра текущего угла поворота траектории (ψп). В блоке «S05» определяется разность между текущим значением угла поворота траектории и предыдущим значением угла поворота траектории вертолета Δψ°=(ψ°тек-ψ°п).
С выхода блока «S04» на вход блока «S06» (фиг. 8, фиг. 9) поступают элементы матрицы перехода от связанной системы координат (oX1Y1Z1) к земной системе координат (oXgYgZg). В блоке «S06» выполняется (фиг. 9) пересчет координат элементов поверхности объемного индекса «Самолет», описываемого массивом значений (L, R, U, B, N) в связанной системе координат, в координаты элементов поверхности объемного индекса «Самолет» земной системы координат и построение элементов поверхностей объемного индекса «Самолет» в координатах земной системы координат. Из блока объемной геометрической формы индекса "Самолет" (ГФ) 39 в блок системы автоматического управления полетом (САУП) 10 поступают координаты крайних точек элементов объемного индекса «Самолет», описываемого массивом значений (L, R, U, B, N) в связанной системе координат (oX1Y1Z1):
- координата крайней точки левого крыла вертолета L(x1, y1, z1),
- координата крайней точки правого крыла вертолета R(x1, y1, z1),
- координата крайней верхней точки киля вертолета U(x1, y1, z1),
- координата крайней нижней точки киля вертолета B(x1, y1, z1),
- координата передней носовой точки вертолета N(x1 y1, z1).
В постоянно работающий блок подготовки к визуализации индекса "Самолет" в вертикальном нисходящем маневре соосного вертолета (ВМ) 40 из блока системы автоматического управления полетом (САУП) 10 поступают значения текущих параметров полета вертолета: угол крена (γ°тек), угол тангажа (υ°тек), угол рыскания (ϕ°тек).
В блоке «S04» вычисляются элементы матрицы (фиг. 9) перехода от связанной с вертолетом системы координат (oX1Y1Z1) к земной системе координат (oXgYgZg). По вычисленным элементам матрицы перехода пересчитываются координаты крайних точек элементов объемного индекса «Самолет», описываемого массивом значений (L, R, U, B, N), в координаты крайних точек элементов объемного индекса «Самолет» в земной системе координат (oXgYgZg).
По координатам крайних точек элементов объемного индекса «Самолет» в земной системе координат, поступающих в блок «S06»: левого крыла вертолета L(xg, yg, zg), правого крыла вертолета R(xg, yg, zg), верхней точки киля вертолета U(xg, yg,zg), нижней точки киля вертолета B(xg, yg, zg), координате передней носовой точки вертолета N(xg yg, zg) формируются поверхности объемного индекса «Самолет» в осях земной системы координат:
- контур крыла
Wxg (Lxg, Nxg, Rxg, Lxg) - проекция на ось Xg земной системы координат.Wyg (Lyg, Nyg, Ryg, Lyg) - проекция на ось Yg земной системы координат.Wzg (Lzg, Nzg, Rzg, Lzg) - проекция на ось Zg земной системы координат.
- контур киля
Exg (Uxg, Nxg, Bxg, Uxg,) - проекция на ось Xg земной системы координат.Eyg (Uyg, Nyg, Byg, Uyg) - проекция на ось Yg земной системы координат.Ezg (Uzg, Nzg, Bzg, Uzg) - проекция на ось Zg земной системы координат.
- прочих элементов контура (линия на нижней стороне крыла)
Syg(l)=Byg; Syg(2)=Nyg;
Szg(l)=Bzg; Szg(2)=Nzg;
Сформированные поверхности крыла и киля объемного индекса «Самолет» содержат последний элемент массива равный первому, соответственно, для контура крыла (Lxg, Lyg, Lzg), для контура киля (Uxg, Uyg, Uzg) - это необходимо для графического описания замкнутого контура поверхности и для вывода на экран командно-пилотажного индикатора цветового отличия верхней поверхности крыла от нижней поверхности крыла, когда летчик наблюдает объемный индекс «Самолет», изменяющий положение в пространстве по углу поворота траектории в вертикальном нисходящем маневре соосного вертолета.
С выхода блока «S05» на вход блока «S07» (фиг. 8, фиг. 10) поступает величина текущего угла поворота траектории (ψ°тек), величина разности значений между текущим значением угла поворота траектории (ψ°тек) и предыдущим значением (ψ°п) текущего угла поворота траектории (Δψ°тек=(ψ°тек-ψ°п)) и проходной параметр текущего угла тангажа (υ°тек), параметр, который не участвует в работе блока «S07», но войдет в блок «S09». В блоке «S07» вычисляется индекс пространственного положения «I» в земной системе координат. На фигуре 10 изображена блок-схема вычисления индекса пространственного положения «I», в которой логическими операторами контролируется величина текущего угла поворота траектории (ψ°тек) и величина разности значений между текущим значением угла поворота траектории (ψ°тек) и предыдущим значением (ψ°п) текущего угла поворота траектории (Δψ°тек=(ψ°тек-ψ°п)).
Если величина разности значений между текущим значением угла поворота траектории (ψ°тек) и предыдущим значением (ψ°п) текущего угла поворота траектории (Δψ°тек=(ψ°тек-ψ°п)) меньше нуля (Δψ°тек < 0), то индексу пространственного положения «I» присваивается значение равное единицы (I=1). Если величина разности значений между текущим значением угла поворота траектории (ψ°тек) и предыдущим значением (ψ°п) текущего угла поворота траектории (Δψ°тек=(ψ°тек-ψ°п)) больше нуля (Δψ°тек > 0), то значение индекса пространственного положения «I» будет зависеть от величины текущего угла поворота траектории (ψ°тек). Если величина текущего угла поворота траектории (ψ°тек ≥ -360°) больше или равна величине (-360°), то индексу пространственного положения «I» присваивается значение равное два (I=2). Если величина текущего угла поворота траектории (ψ°тек > 0°) больше нуля, то индексу пространственного положения «I» присваивается значение равное три (I=3).
С выхода блока «S06» на первый вход блока «S08» (фиг. 8, фиг. 11) поступают сформированные по координатам крайних точек элементы поверхностей (контур заполнен цветом) объемного индекса «Самолет» в координатах земной системы координат: поверхность крыла (левого, правого), поверхность киля (верхней точки киля, нижней точки киля), поверхности прочих элементов.
С выхода блока «S07» на вход блока «S09» (фиг. 8, фиг. 10, фиг. 12) поступают входные данные: индекс пространственного положения - «I», текущее значение угла поворота траектории (ψ°тек), текущее значение угла тангажа (υ°тек), по которым вычисляется индекс последовательного вывода «J» по общей схеме представленной на фигуре 12. В зависимости от значения индекса пространственного положения «I» будет выбрана одна из схем последовательного графического вывода элементов поверхностей объемного индекса «Самолет» в координатах земной системы координат:
- при «I=1» индекс последовательного вывода «J», будет вычисляться по схеме, представленной на фигуре 13;
- при «I=2» индекс последовательного вывода «J», будет вычисляться по схеме, представленной на фигуре 14;
- при «I=3» индекс последовательного вывода «J», будет вычисляться по схеме, представленной на фигуре 15;
На фигуре 13 изображена схема вычисления индекса последовательного вывода «J» элементов поверхностей объемного индекса «Самолет» при входящих значениях текущего угла поворота траектории (ψ°тек), текущего значения угла тангажа (υ°тек) и входящем значении индекса пространственного положения «I» равного единице «I=1». При данной схеме вычисления индекса последовательного вывода «J» контролируется входное значение текущего угла поворота траектории (ψ°тек). Если текущее значение текущего угла поворота траектории больше нуля (ψ°тек > 0.0°), то при данной величине текущего угла поворота траектории (ψ°тек) сравнивается величина текущего угла тангажа (υ°тек) с абсолютной величиной угла тангажа (abs(180°)) меньшей или равной (180°) градусов (υ°тек ≤ abs(180°)) для дальнейших расчетов. Если входное значение текущего угла поворота траектории меньше нуля (ψ°тек < 0.0°), то выполняется предварительная операция увеличения значения текущего угла поворота траектории на (360°) градусов (ψ°тек=ψ°тек+360°) и далее сравнение величины текущего угла тангажа (υ°тек) с абсолютной величиной угла тангажа (abs(180°)) меньшей или равной (180°) градусов (υ°тек ≤ abs(180°)) для дальнейших расчетов. Если текущее значение угла тангажа меньше или равно нулю (υ°тек ≤ 0.0), то: - при величине угла поворота траектории меньше или равного (90°) градусов (υ°тек ≤ 90°) значение индекса последовательного вывода «J» равно единице «J=1»; - при величине угла поворота траектории больше или равного (90°) градусов (ψ°тек ≥ 90°) значение индекса последовательного вывода «J» равно двум «J=2»; - при величине угла поворота траектории больше или равного (270°) градусов (ψ°тек ≥ 270°) значение индекса последовательного вывода «J» равно единице «J=1»; Если текущее значение угла тангажа больше нуля (υ°тек > 0.0), то: - при величине угла поворота траектории меньше или равного (90°) градусов (ψ°тек ≤ 90°) значение индекса последовательного вывода «J» равно двум «J=2»; - при величине угла поворота траектории (ψ°тек) больше (90°) градусов (ψ°тек > 90°) значение индекса последовательного вывода «J» равно единице «J=1»; - при величине угла поворота траектории больше или равного (270°) градусов (ψ°тек ≥ 270°) значение индекса последовательного вывода «J» равно единице «J=2». С выхода блока «S09» на второй вход блока «S08» при входных значениях текущего угла поворота траектории (ψ°тек), текущего угла тангажа (υ°тек) и индекса пространственного положения равного единице «I=1» поступает значение вычисленного индекса последовательного вывода «J».
На фигуре 14 изображена схема вычисления индекса последовательного вывода «J» элементов поверхностей объемного индекса «Самолет» при входящих значениях текущего угла поворота траектории - (ψ°тек), текущего значения угла тангажа (υ°тек) и входящем значении индекса пространственного положения «I» равного двум «I=2». При данной схеме вычисления индекса последовательного вывода «J» контролируется входное значение текущего угла поворота траектории (ψ°тек). Если входящее текущее значение угла поворота траектории (ψ°тек) не лежит в диапазоне углов «больше или равно отрицательному значению угла (-360°) и меньше или равно нулю (-360° ≤ ψ°тек ≤ 0.0)», то «НЕТ» и происходит выход из данного блока на вход блока «S08» со значением индекса последовательного вывода «J» взятого от предыдущего цикла работы. Если текущее значение угла поворота траектории (ψ°тек) лежит в диапазоне углов «больше или равно отрицательному значения угла (-360°) и меньше или равно нулю (-360° ≤ ψ°тек ≤ 0.0), то дальнейшее вычисление индекса последовательного вывода «J» будет определяться сравнением величины текущего угла тангажа (υ°тек) с меньшей или равной абсолютной величиной угла тангажа (abs(180°)) градусов (υ°тек ≤ abs(180°)). Если текущее значение угла тангажа (υ°тек) меньше нуля (υ°тек < 0.0), то: - при величине угла поворота траектории (ψ°тек) больше (90°) градусов (ψ°тек > 90°) значение индекса последовательного вывода «J» равно единице «J=1»; - при величине угла поворота траектории (ψ°тек) меньше (90°) градусов (ψ°тек < 90°) значение индекса последовательного вывода «J» равно двум «J=2»; - при величине угла поворота траектории (ψ°тек) меньше (270°) градусов (ψ°тек < 270°) значение индекса последовательного вывода «J» равно единице «J=1». Если текущее значение угла тангажа (ψ°тек) больше нуля (ψ°тек > 0.0), то: - при величине угла поворота траектории (ψ°тек) больше (90°) градусов (ψ°тек > 90°) значение индекса последовательного вывода «J» равно двум «J=2»; - при величине угла поворота траектории (ψ°тек) меньше (90°) градусов (ψ°тек < 90°) значение индекса последовательного вывода «J» равно единице «J=1»; - при величине угла поворота траектории (ψ°тек) меньше (270°) градусов (ψ°тек < 270°) значение индекса последовательного вывода «J» равно двум «J=2». С выхода блока «S09» на второй вход блока «S08» при входных значениях текущего угла поворота траектории (ψ°тек), текущего угла тангажа (υ°тек) и входящем значении индекса пространственного положения равного двум «I=2» поступает значение вычисленного индекса последовательного вывода «J».
На фигуре 15 изображена схема вычисления индекса последовательного вывода «J» элементов поверхностей объемного индекса «Самолет» при входящих значениях текущего угла поворота траектории - (ψ°тек), текущего угла тангажа (υ°тек) и входящем значении индекса пространственного положения «I» равного трем «I=3». При данной схеме вычисления индекса последовательного вывода «J» контролируется входное значение текущего угла поворота траектории (ψ°тек). Если текущее значение угла поворота траектории (ψ°тек) меньше нуля (ψ°тек < 0.0°), то «НЕТ» и происходит выход из блока «S09» со значением индекса последовательного вывода «J» взятого от предыдущего цикла работы. Если текущее значение угла поворота траектории (ψ°тек) больше нуля (ψ°тек > 0.0°), то «ДА» и значению индекса последовательного вывода «J» присваивается значение равное единице «J=1» и вычисление продолжается сравнением величины текущего угла тангажа (υ°тек) с абсолютной величиной угла тангажа (abs(180°)) меньшей или равной (180°) градусов (υ°тек ≤ abs(180°)). Если текущее значение угла тангажа (υ°тек) меньше нуля (υ°тек < 0.0), то: - при величине угла поворота траектории (ψ°тек) больше (90°) градусов (ψ°тек > 90°) значение индекса последовательного вывода «J» равно двум «J=2»; - при величине угла поворота траектории (ψ°тек) больше (180°) градусов (ψ°тек > 180°) значение индекса последовательного вывода «J» равно двум «J=2»; - при величине угла поворота траектории (ψ°тек) больше (270°) градусов (ψ°тек > 270°) значение индекса последовательного вывода «J» равно единице «J=1»; Если текущее значение угла тангажа (υ°тек) больше нуля (υ°тек > 0.0), то: - при величине угла поворота траектории (ψ°тек) больше (90°) градусов (ψ°тек > 90°) значение индекса последовательного вывода «J» равно единице «J=1»; - при величине угла поворота траектории (ψ°тек) меньше или равного (90°) градусов (ψ°тек < 90°) значение индекса последовательного вывода «J» равно двум «J=2»; - при величине угла поворота траектории (ψ°тек) меньше или равного (270°) градусов (ψ°тек < 270°) значение индекса последовательного вывода «J» равно единице «J=1». С выхода блока «S09» на второй вход блока «S08» при входных значениях текущего угла поворота траектории (ψ°тек), текущего угла тангажа (υ°тек) и входящем значении индекса пространственного положения равного трем «I=3» поступает значение вычисленного индекса последовательного вывода «J».
С выхода блока «S09» на второй вход блока «S08» (фиг. 11, фиг. 8) поступает численное значение индекса пространственного положения - «I» и индекса последовательного вывода - «J» в зависимости от углов пространственного положения связанной системы координат: текущего угла тангажа (υ°тек) и текущего угла поворота траектории (ψ°тек). На фигуре 11 изображена схема блока «S08», в которой в зависимости от величины индекса последовательного вывода «J» изменяется последовательность вывода сформированных поверхностей по координатам крайних точек элементов поверхностей объемного индекса «Самолет» в координатах земной системы координат: поверхность контура крыла, поверхность контура киля, поверхности прочих элементов контура. При значении индекса последовательного вывода «J=1», равном единице на индикационное поле экрана, будут последовательно выводиться сформированные поверхности: поверхность контура киля; поверхность контура крыла; поверхности контуров прочих элементов, для того чтобы графическое изображение поверхности контура крыла закрывало графическое изображением поверхности контура киля. Поверхности прочих элементов закрывают поверхности крыла. Цвет поверхности крыла будет соответствовать цвету нижней поверхности крыла. При значении индекса последовательного вывода «J=2» равном двум на индикационное поле 3 экрана 1 будут последовательно выводиться сформированные поверхности: поверхности контуров прочих элементов, поверхность контур крыла, поверхность контура киля. Для того, чтобы графическое изображение поверхности контура киля закрывало графическое изображением поверхности контура крыла и поверхности прочих элементов. Цвет поверхности крыла будет соответствовать цвету верхней поверхности крыла.
С выхода блока «S08» на вход блока «S03» (фиг. 8, фиг. 11) поступают сформированные поверхности объемного индекса «Самолет» в земной системе координат в соответствии с индексом пространственного положения «I» и индексом последовательного вывода «J». В блоке «S03» (фиг. 6, фиг. 7) поступившие сформированные поверхности объемного индекса «Самолет» в земной системе координат проецируются на плоскость индикационного поля 3 экрана 1 изображая объемный индекс «Самолет» в центре (Yc, Zc) индикационного поля 3 экрана 1.
С первого выхода блока «S03» на вход блока «S10» (фиг. 8) поступает параметр текущего угла поворота траектории вертолета (ψ°тек), который переименовывается в параметр предыдущего значения угла поворота траектории вертолета (ψ°п=ψ°тек);
С выхода блока «S10» на вход блока «S02» (фиг. 8) поступают параметры предыдущего значения текущего угла поворота траектории вертолета (ψ°п). При следующем рабочем цикле обращении блока системы автоматического управления полетом (САУП) 10 к блоку подготовки к визуализации индекса "Самолет" в вертикальном нисходящем маневре соосного вертолета (ВМ) 40 будет использоваться параметр предыдущего значения текущего угла поворота траектории вертолета (ψ°п) от блока «S10».
Со второго выхода блока «S03», который располагается в блоке подготовки к визуализации индекса "Самолет" в вертикальном нисходящем маневре соосного вертолета (ВМ) 40, на вход блока логических переключателей (ЛП) 44 (фиг. 6, фиг. 8), который располагается в блоке системы автоматического управления полетом (САУП) 10, поступают сформированные поверхности объемного индекса «Самолет» в земной системе координат, спроецированные на плоскость индикационного поля 3 в центре (Yc, Zc) индикационного поля 3, в соответствии с индексом пространственного положения «I» и индексом последовательного вывода «J». В блоке логических переключателей (ЛП) 44 (фиг. 6, фиг. 8) абсолютное значение входной величины текущего угла тангажа (abs(υ°тек)) сравнивается с абсолютным значением величины предельно-минимального угла тангажа (abs(υ°пр)). Если удовлетворяется условие (abs(υ°тек) ≥ abs(υ°пр)), при котором (фиг. 6, фиг .8) абсолютное значение входной величины текущего угла тангажа (abs(υ°тек)) больше или равно абсолютному значению величины предельно-минимального угла тангажа (abs(υ°пр)), то в блоке логических переключателей (ЛП) 44 включается переключатель (ПВМ) 45 и выключается переключатель (ПСЛ) 46. В этом случае летчик на индикационное поле 3 экрана 1 командно-пилотажного индикатора (КПИ) 9 увидит визуализацию полета своего вертолета летящего в земной системе координат в вертикальном нисходящем маневре соосного вертолета в виде сформированных поверхностей объемного индекса «Самолет», описываемого массивом значений (L, R, U, B, N).
На фигурах 16÷31 изображены фрагменты визуализации пространственного положения объемного индекса «Самолет» на индикационном поле 3 экрана 1 командно-пилотажного индикатора в зависимости от угла поворота траектории в вертикальном нисходящем маневре соосного вертолета. Летчик наблюдает пространственный полет объемного индекса «Самолет», который изображается сформированными поверхностями объемного индекса «Самолет» в земной системе координат и спроецированными на плоскость индикационного поля 3 экрана 1, (фиг. 7), в соответствии с индексом пространственного положения «I» и индексом последовательного вывода «J».
На фигурах 17÷23 летчик наблюдает цвет верхней поверхности крыла, а на фигурах 25÷31 летчик наблюдает цвет нижней поверхности крыла. На фигурах 16 и 24 летчик наблюдает профиль левого и правого борта своего вертолета. Такое пространственное положение стилизованного образа вертолета позволяет летчику ясно представлять пространственное и угловое положение его вертолета, ориентируясь по изображению объемной фигуры индекса «Самолет» на индикационном поле 3 экрана 1 в вертикальном нисходящем маневре соосного вертолета, без потери пространственной ориентации.
На фигуре 32 представлена схема исполнения «Вертикального нисходящего маневра соосного вертолета». Маневр разработал, теоретически обосновал и выполнил летчик высшей квалификации Заслуженный летчик-испытатель СССР, Герой Советского Союза Бездетнов Николай Павлович на аэродроме Чкаловский Московской области.
Описание маневра в комментарии Николая Павловича Бездетнова.
Вертолет КА 32 полетный вес минимальный. На высоте Н=10 (десять) метров разгон вертолета КА 32 на максимальной воздушной скорости у земли и на взлетной мощности двигателей, ввод в горку 45°. При удерживании тангажа и мощности, вертолет за несколько секунд занимает высоту порядка 1000 метров и при около нулевой воздушной скорости выходит на вертикаль от точки ввода в горку (траектория «А-В»).
Далее, (вершина «В») полный сброс общего шага и плоский разворот (педалью) на 180 градусов, ручкой управления доведение тангажа до (-90°) (продольная ось фюзеляжа направлена вертикально к земле) и ручкой управления создал левое вращение фюзеляжа относительно его продольной оси (траектория «В-С»).
При этом воздушная скорость вертикального к земле полета (падения) энергично возрастает, (траектория «С-Д») но темп этого роста хорошо реагирует своим уменьшением на увеличение частоты вращения, и полностью останавливается до выхода на воздушные скоростные ограничения. Установившаяся воздушная скорость поддается и уменьшению при дальнейшем увеличении частоты вращения. В общем, хорошо срабатывает эффект значительного падения воздушной скорости полета при выполнении на самолете штопорной бочки.
Выход из этого режима. Плавное взятие ручки управления на себя с одновременным плавным уменьшением частоты вращения приводит к увеличению тангажа, появлению и увеличению радиуса, и уменьшению воздушной скорости полета. При продолжении увеличения радиуса и уменьшении скорости, вертолет переходит в режим близкий к авторотационному на широкой нисходящей спирали. Только после этого рычаг общего шага снимается с нижнего упора и используется для дальнейшего полетного расчета. Для полного и безопасного вывода из этого режима требуется 200-250 метров высоты (траектория «Д-Е»).
Описанный режим позволяет вертолету максимально быстро снизиться с любой высоты полета и это значительно увеличивает его применительные возможности. Но энергичное постоянное изменение в пространстве плоскости вращения несущего винта (НВ) неизбежно приводит, так же, к постоянному прецессионному паразитному его отклонению. В моем случае (при вращении влево) контуры концов лопастей верхнего и нижнего винтов должны были сближаться навстречу друг другу в переднем азимуте. Рассчитывая перед полетом сопряжения всех доступных физических нюансов, я очень надеялся на полностью сброшенный общий шаг. Это должно было направить все аэродинамические силы лопастей, не обремененные воздушными срывными зонами через регуляторы взмаха, на сопротивление прецессионным паразитным моментам, стремящимся сблизить контуры НВ. И это сработало.
Но чтобы узаконить этот маневр, сделать его широко применяемым и безопасным, нужно инструментально и точно выяснить величину сближения концов лопастей на подобном моему маневре, на установившейся около максимально допустимой воздушной скорости вертикального нисходящего полета. Только после этого прояснится возможность увеличения полетного веса именно этого вертолета. Ибо, чем больший полетный вес, тем большая частота вращения потребуется для стабилизации воздушной скорости, а это неизбежное увеличение паразитных прецессионных моментов. С этой же целью можно просчитать конструктивное увеличение эффективности регулятора взмаха, и возможность применения этого маневра на других вертолетах, и не только на соосных.
В общем, в свете темы, вполне назрел смысл и в продумывании конструктивных возможностей уменьшения срывных зон на лопастях НВ, и об индикационной информации о запасе до критических углов атак всего НВ.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2018 |
|
RU2711196C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2019 |
|
RU2716886C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР ВЕРТОЛЕТА | 2013 |
|
RU2539708C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР ВЕРТОЛЕТА | 2020 |
|
RU2778716C2 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2011 |
|
RU2474862C1 |
| Светотехническое оборудование взлетно-посадочной площадки корабля | 2019 |
|
RU2739849C1 |
| СИСТЕМА ИНДИКАЦИИ ВЗЛЕТА И ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2016 |
|
RU2647344C2 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2004 |
|
RU2267747C1 |
| АВТОМАТИЗИРОВАННЫЙ СПОСОБ РАЗДЕЛЬНОГО УПРАВЛЕНИЯ БОКОВЫМ И ВЕРТИКАЛЬНЫМ ТРАЕКТОРНЫМ ДВИЖЕНИЕМ ЛА | 1998 |
|
RU2141624C1 |
| СПОСОБ ПОДДЕРЖАНИЯ ЧИСЛА ОБОРОТОВ НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА В ДОПУСТИМЫХ ПРЕДЕЛАХ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2231479C2 |

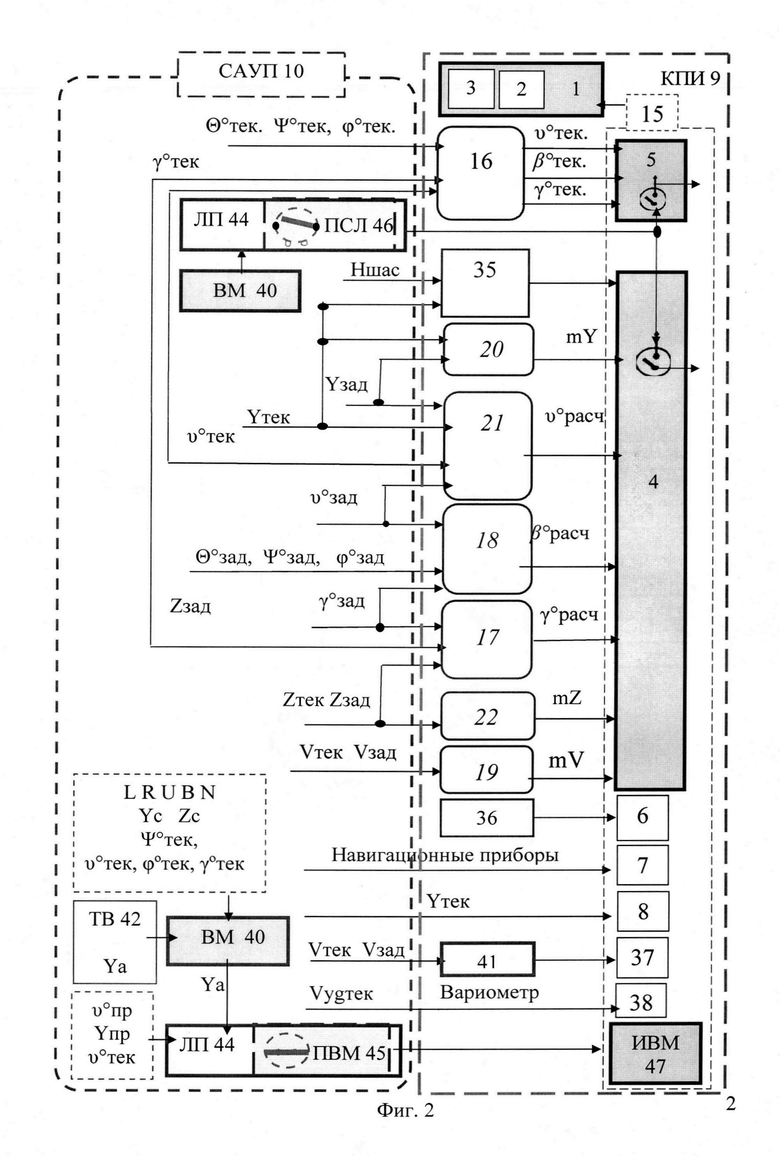
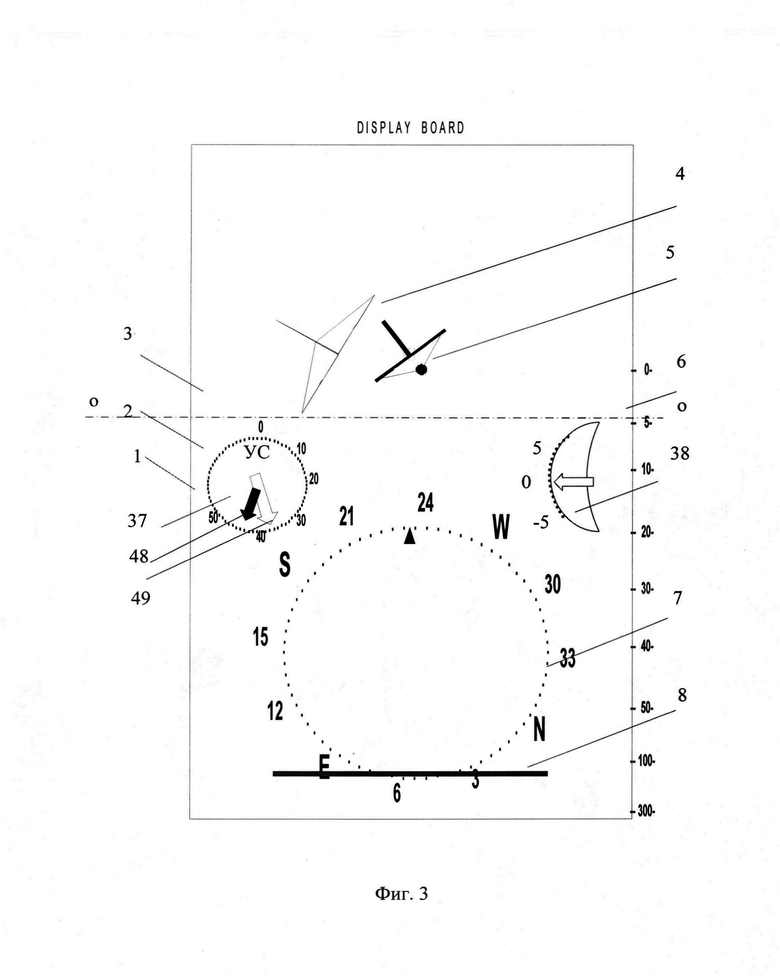
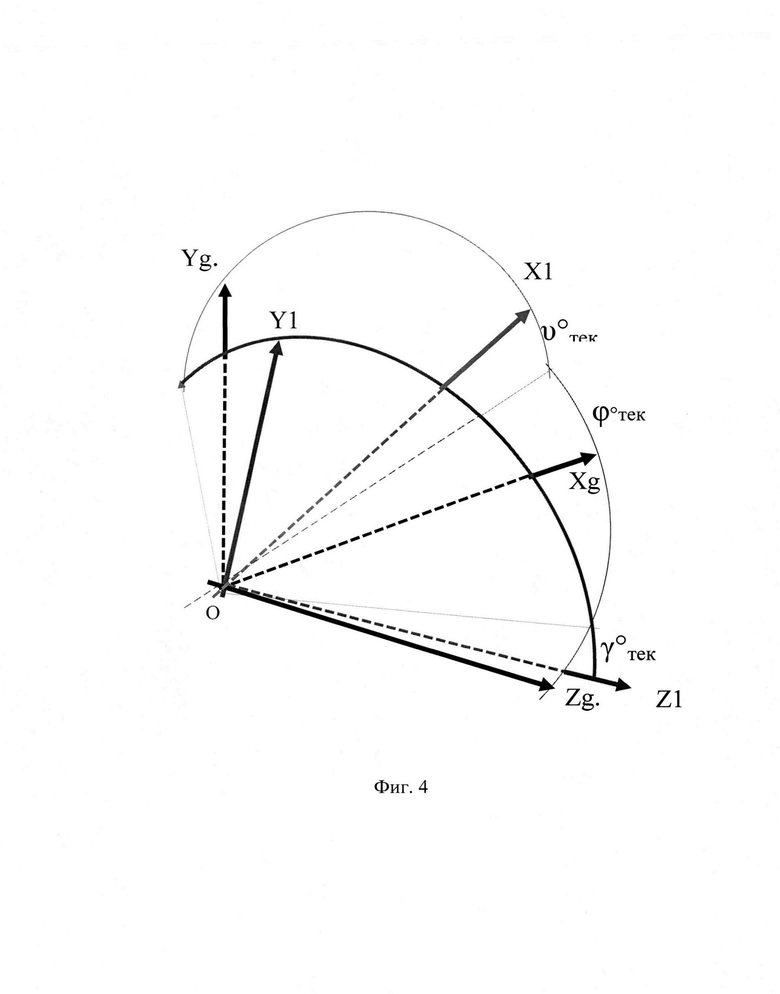
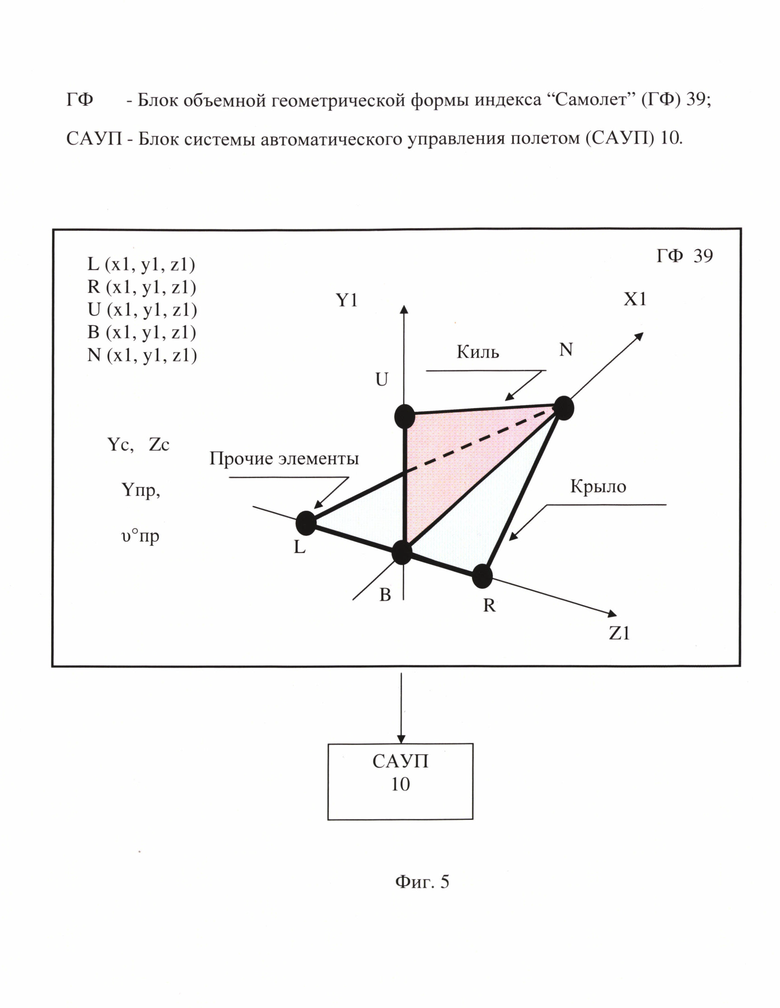
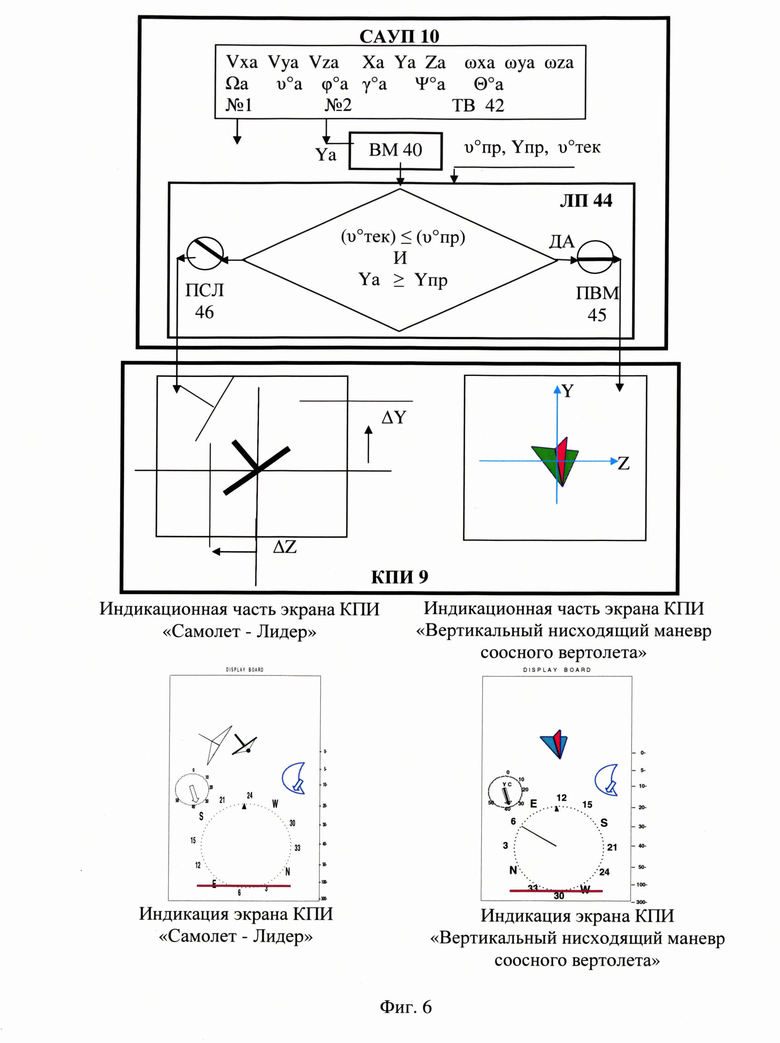

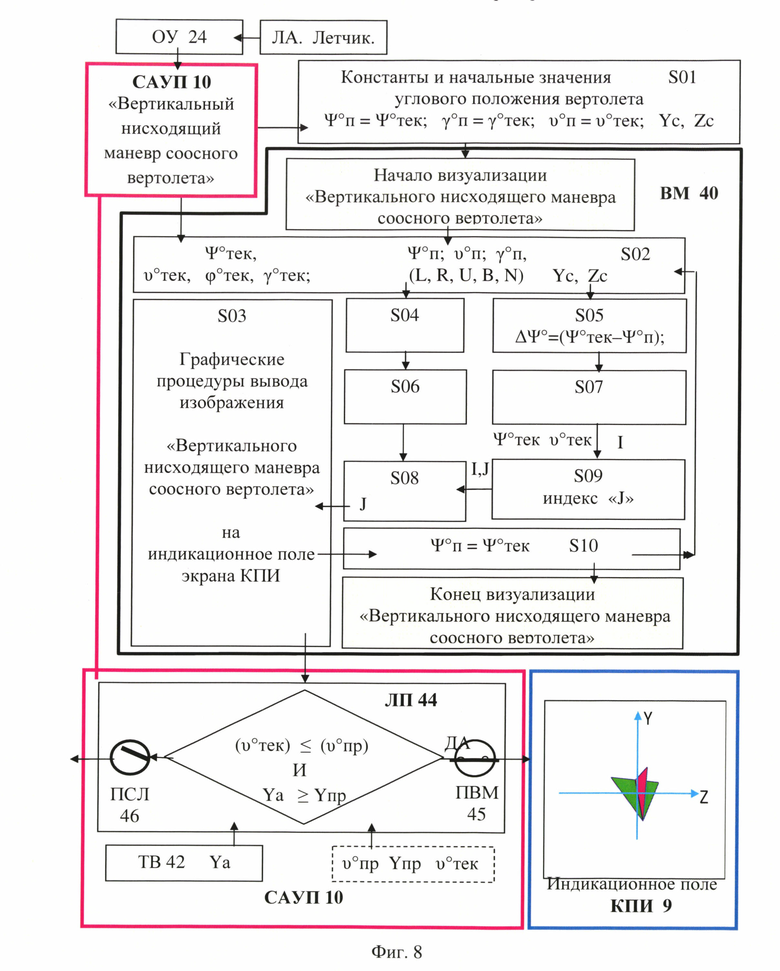
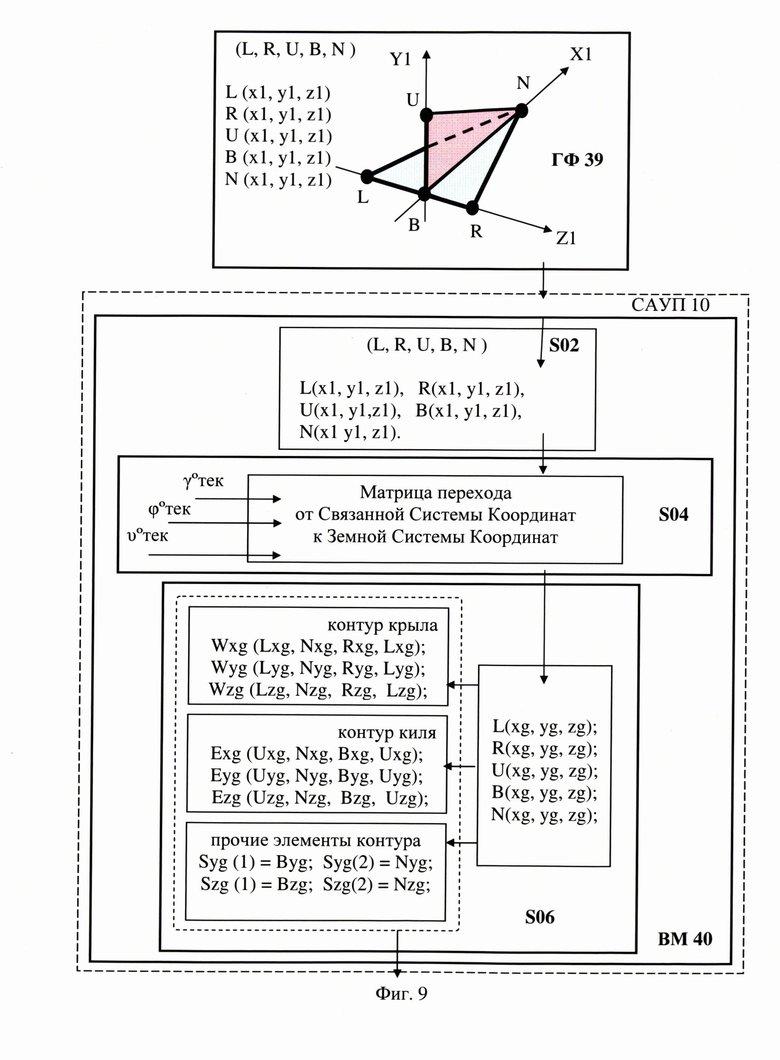
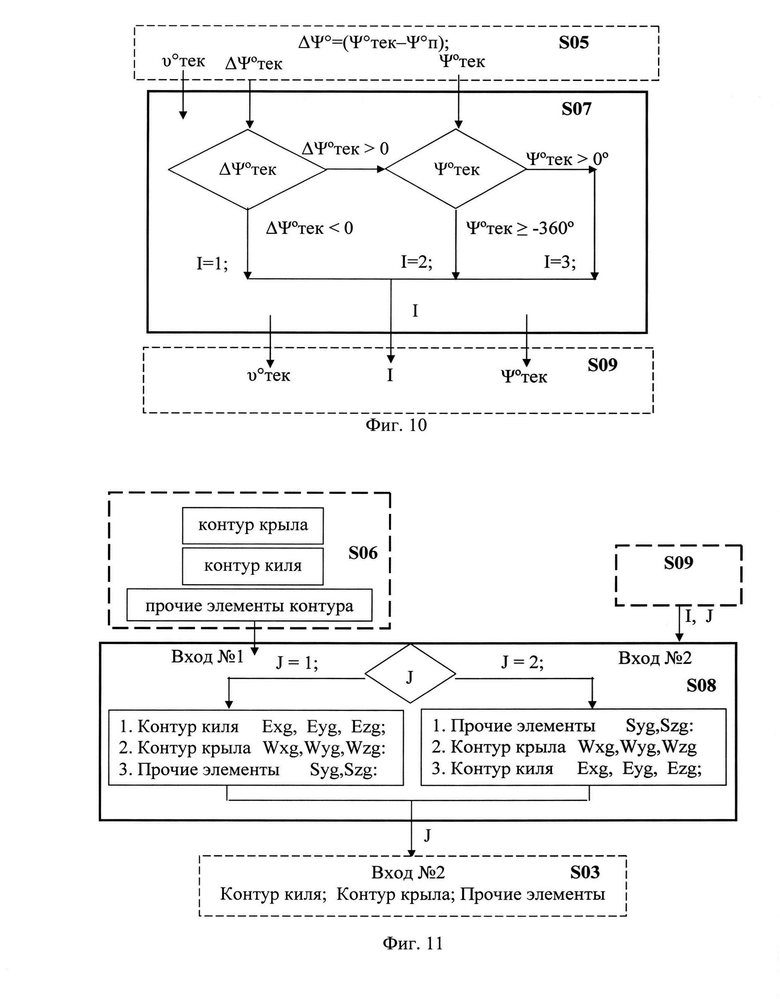
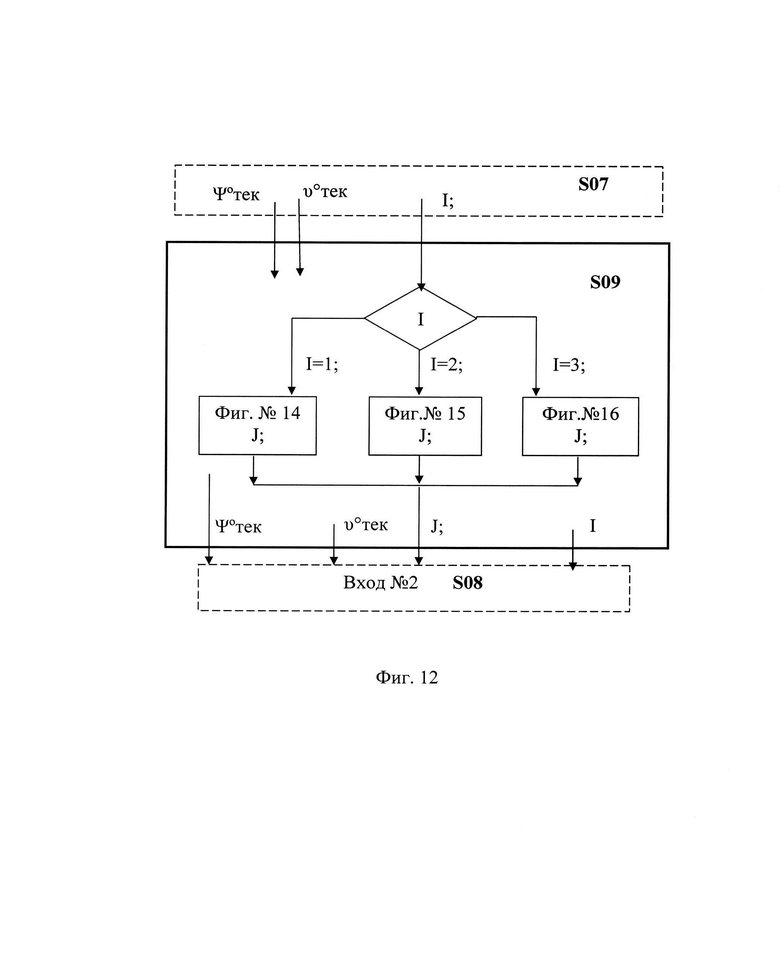
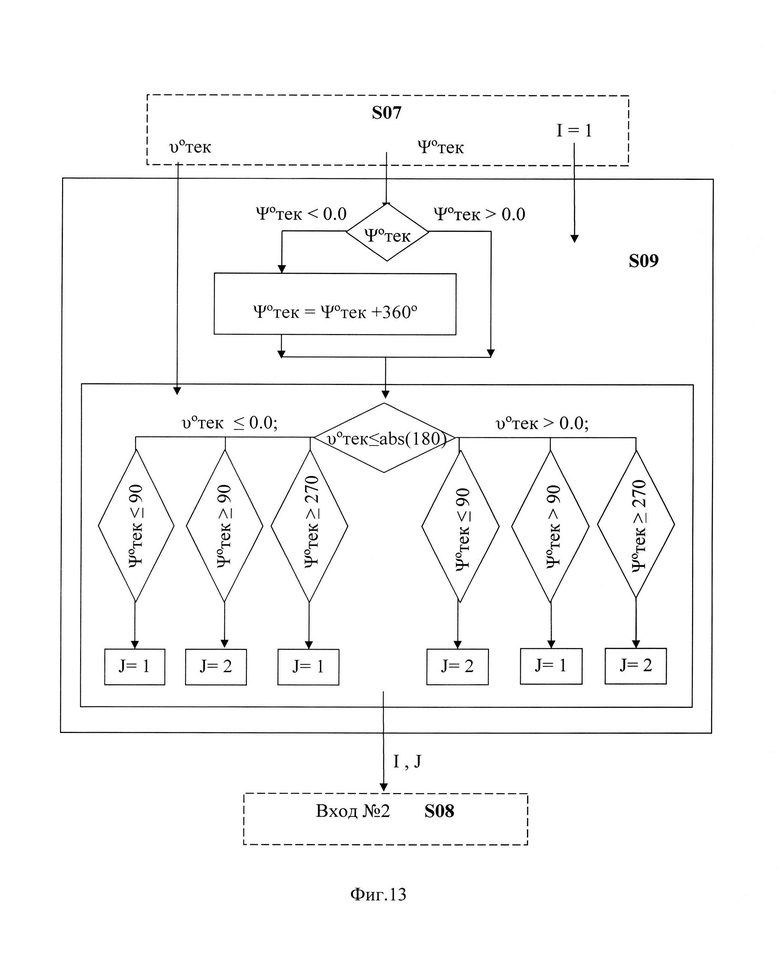
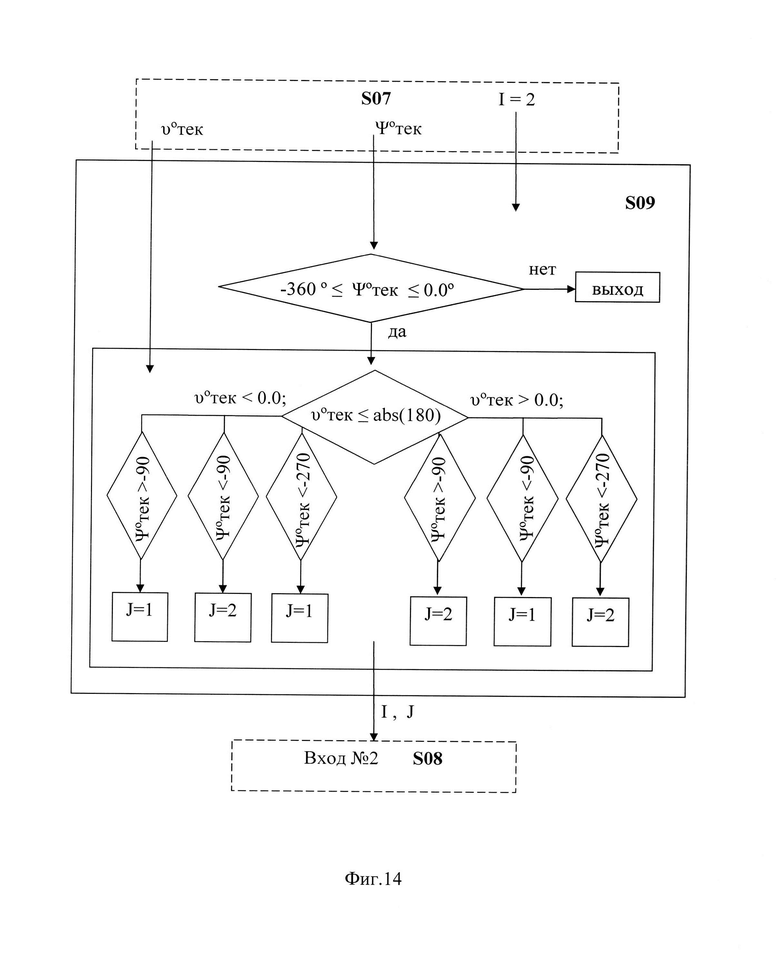
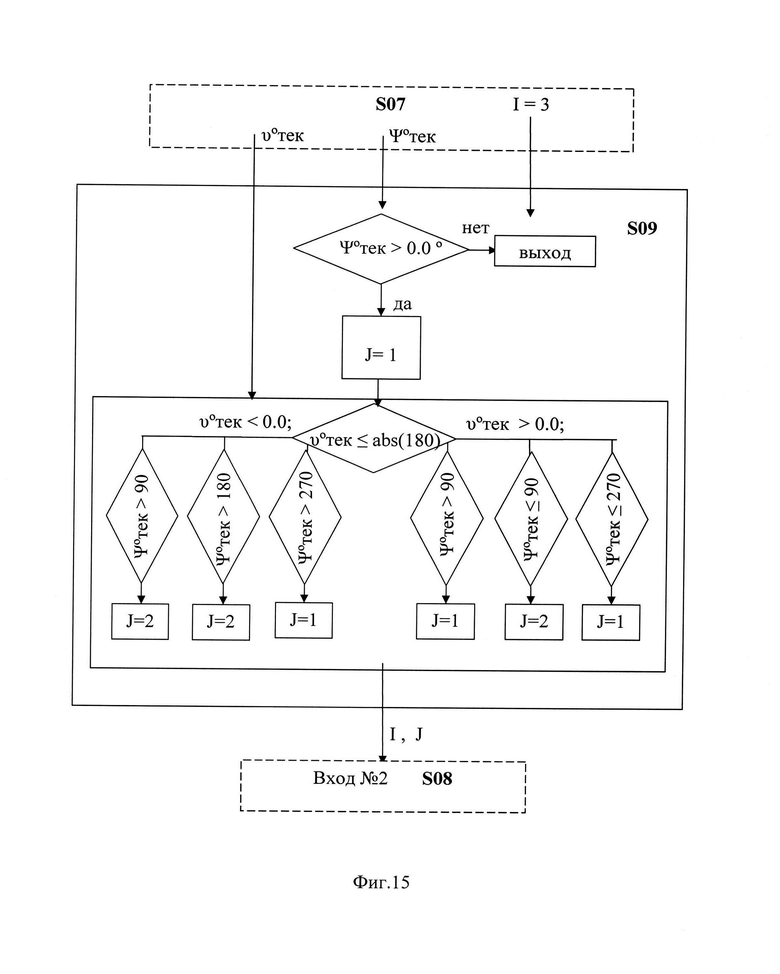
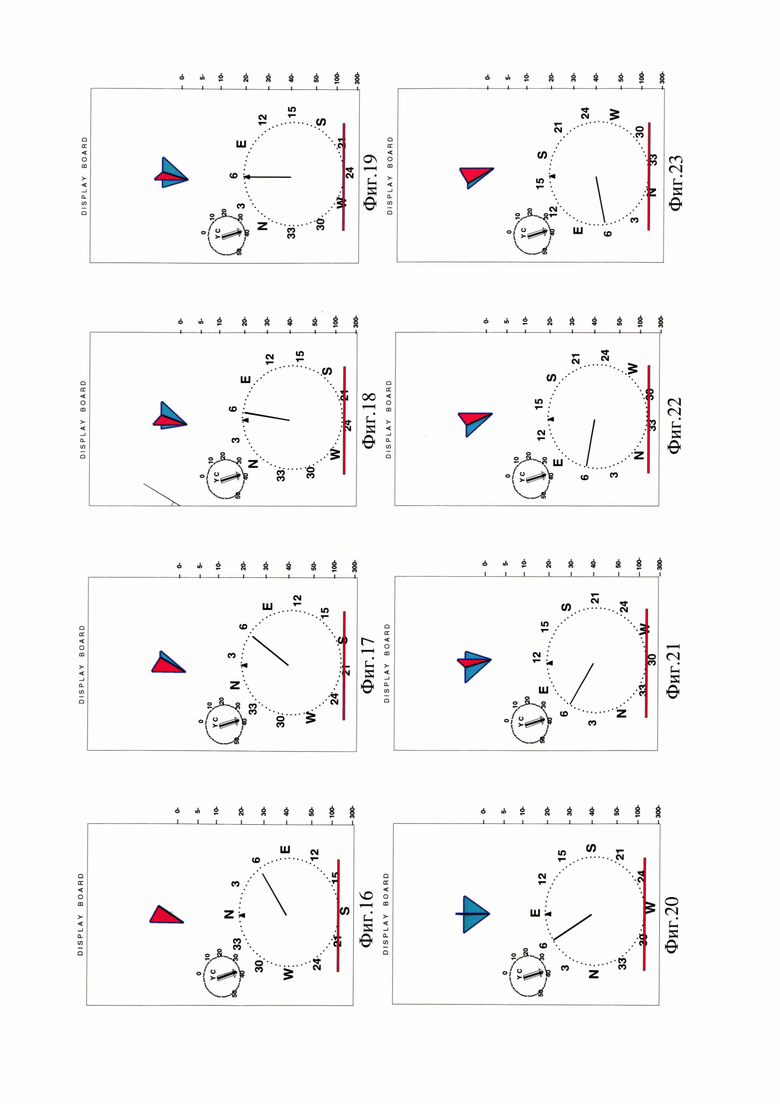
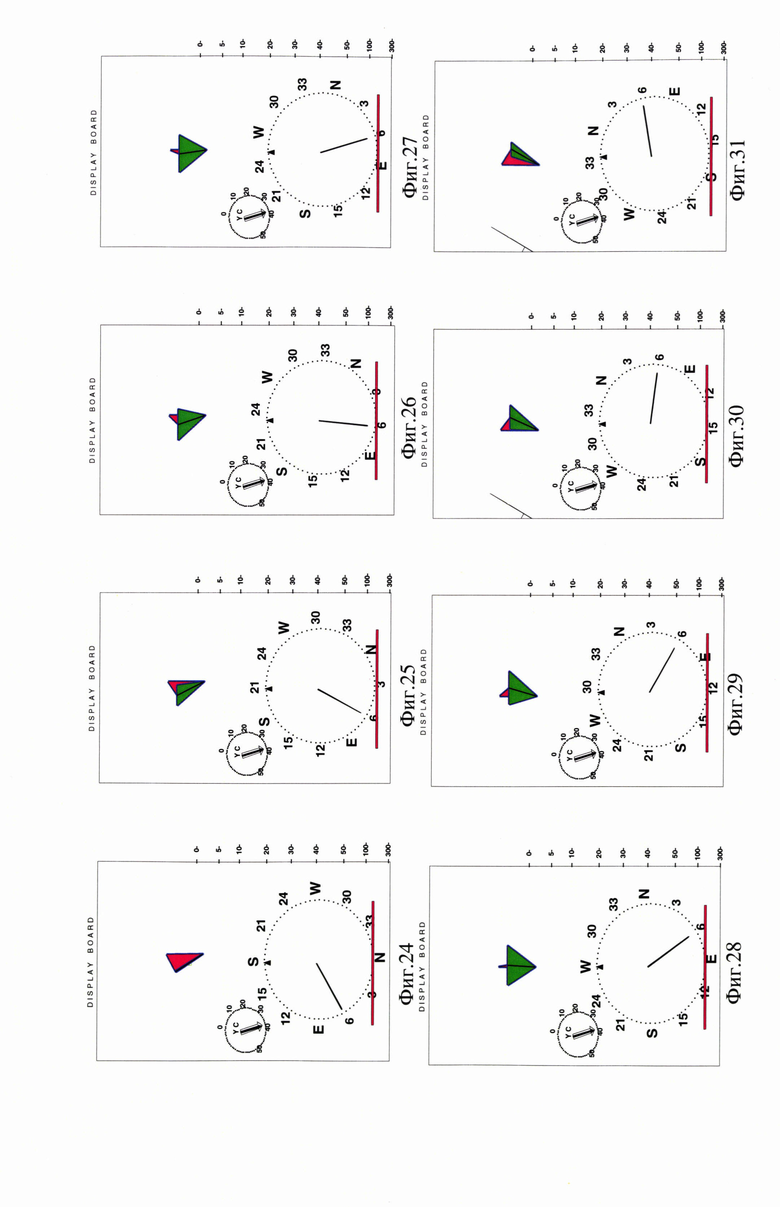
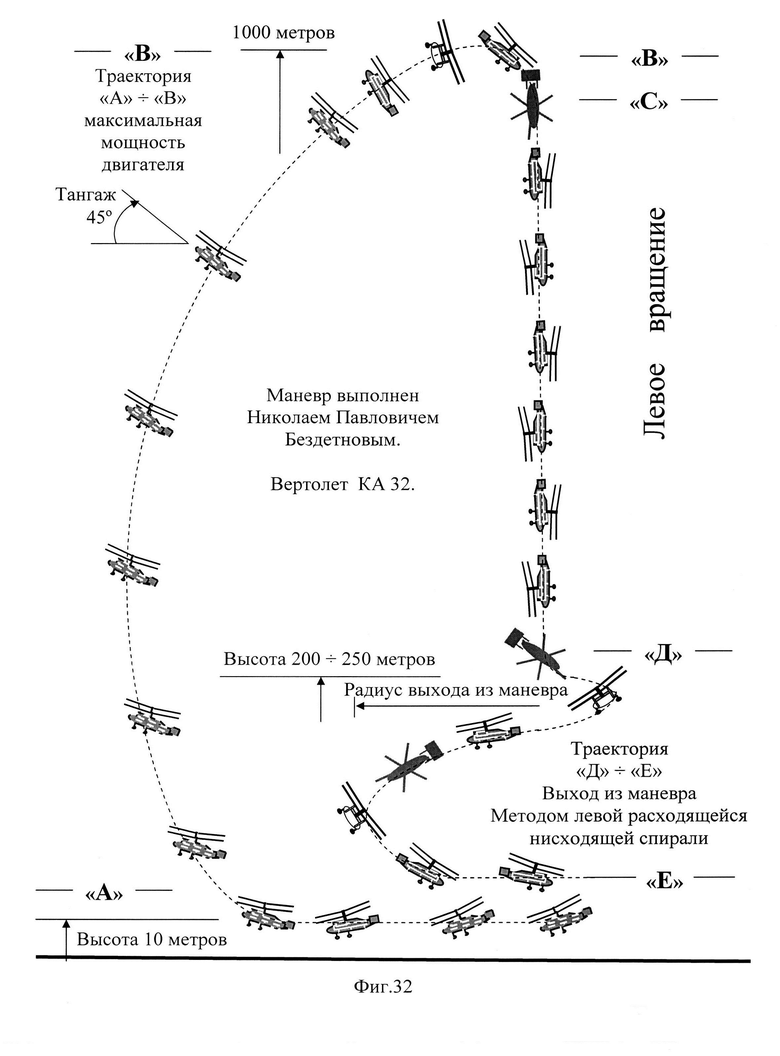
Командно-пилотажный индикатор вертолета содержит экран, выполненный с возможностью отображения определенным образом индексов «Самолет», «Лидер», «Радиовысота», а также содержит блок учета расхода в полете массы полезной нагрузки вертолета, блок, индицирующий указатель скорости полета вертолета с числовой шкалой, индекс указателя текущей скорости полета вертолета, индекс указателя заданной скорости полета вертолета, блок вычисления в связанной с вертолетом системе координат пространственного положения центра масс, моментов инерции вертолета в полете и значения параметра продольного расстояния от центра масс вертолета до оси несущего винта, блок расчета прогнозируемой скорости полета вертолета и переключатель блоков автопилота функций автоматической стабилизации по тангажу, высоте и скорости. Обеспечивается упрощение ручного пилотирования вертолетом в вертикальном нисходящем маневре соосного вертолета, снижение психофизиологической и нервной нагрузки летчика в процессе удержания вертолета в заданных параметрах полета, повышение безопасности полета за счет уменьшения нагрузки, связанной с наблюдением за навигационными данными полета. 31 ил.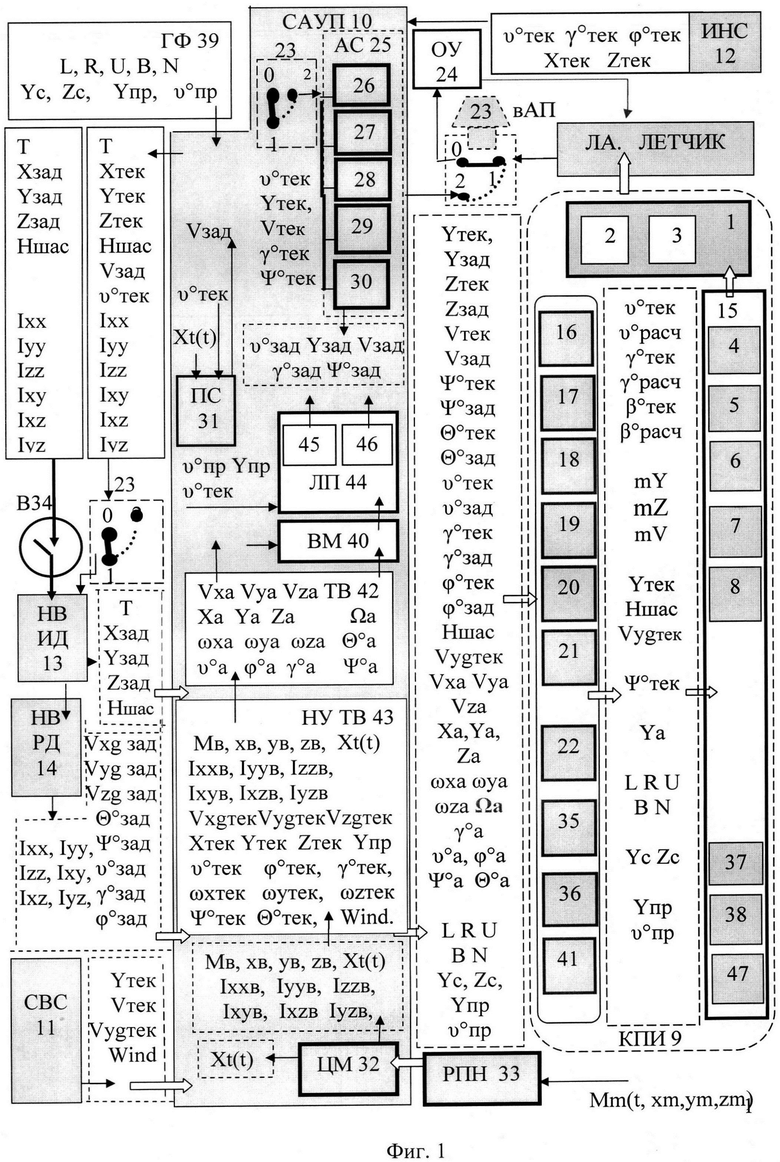
Командно-пилотажный индикатор вертолета, содержащий экран, на котором индицируются неподвижный относительно центра индикационного поля экрана отсчетный индекс "Самолет", выполненный в виде одной горизонтальной прямой, символизирующей крылья летательного аппарата (ЛА), и одной вертикальной прямой, символизирующей киль ЛА, и пересекающей горизонтальную прямую в ее центре под прямым углом, имеющий возможность поворота вокруг своего центра симметрии и обозначающий текущее положение вертолета в пространстве, индицируемый на экране подвижный индекс "Лидер", выполненный в виде одной горизонтальной прямой, символизирующей крылья ЛА и одной вертикальной прямой, символизирующей киль ЛА, и пересекающей горизонтальную прямую в ее центре под прямым углом, имеющий возможность поворота вокруг своего центра симметрии, а также перемещения по вертикали и горизонтали относительно индекса "Самолет", и обозначающий требуемое положение в пространстве, генератор символов соединенный с экраном, средства управления подвижным индексом "Лидер", выполненные в виде блоков вычисления характеристик "Лидера", а именно: блока вычисления параметров текущего угла скольжения, - блока вычисления значения расчетного угла крена, блока вычисления расчетного угла скольжения, блока расчета отклонения ЛА по высоте полета и коэффициента масштаба отклонения высоты полета ЛА, блока вычисления значения расчетного угла тангажа, блока расчета бокового отклонения и коэффициента масштаба бокового отклонения ЛА, на входы которых поступают сигналы из систем ЛА, а с выходов которых на генератор символов поступают сигналы в соответствии с величиной ошибки управления по высоте, обеспечивающие перемещение индекса "Лидер" по индикационному полю в вертикальном направлении, с возможностью индикации индекса "радиовысота" и неподвижной неравномерной шкалы значения высоты полета, индицируемой на вертикальной стороне границы индикационного поля экрана с нулевым значением высоты, расположенным на уровне горизонтальной линии, проходящей через центр индикационного поля экрана, при этом индекс "Самолет" и индекс "Лидер" выполнены с возможностью одновременного отображения угла скольжения и угла тангажа, путем индикации треугольника, основание которого равно длине горизонтальной прямой линии, символизирующей крылья ЛА, а положение вершины треугольника соответствует текущему значению угла тангажа и угла скольжения индексом "Самолет" и отклонению от заданного значения угла тангажа и угла скольжения индексом "Лидер" поворотом индекса "Лидер" вокруг центра симметрии в соответствии с величиной ошибки по углу крена, увеличением или уменьшением линейных размеров индекса «Лидер» при увеличении или уменьшении, соответственно, заданной скорости полета таким образом, что при нулевых значениях ошибок по всем контролируемым параметрам индекс "Лидер" совмещается с индексом "Самолет", командно-пилотажный индикатор содержит: блок учета расхода в полете массы полезной нагрузки вертолета, блоком, индицирующим указатель скорости полета вертолета, указателем скорости полета вертолета с числовой шкалой, индексом указателя текущей скорости полета вертолета, индексом указателя заданной скорости полета вертолета, блок вычисления в связанной с вертолетом системе координат пространственного положения центра масс, моментов инерции вертолета в полете и значения параметра продольного расстояния от центра масс вертолета до оси несущего винта, блок расчета прогнозируемой скорости полета вертолета и переключатель блоков автопилота функций автоматической стабилизации по тангажу, высоте и скорости, причем вход блока учета расхода в полете массы полезной нагрузки вертолета соединен с системами ЛА по параметрам расходуемой в полете массы полезной нагрузки вертолета, а выход соединен с входом блока вычисления в связанной с вертолетом системе координат пространственного положения центра масс, моментов инерции вертолета в полете и значения параметра продольного расстояния от центра масс вертолета до оси несущего винта по параметру расходуемой в полете полезной нагрузки вертолета, выход которого соединен с первым входом блока расчета прогнозируемой скорости полета вертолета по параметру продольного расстояния от центра масс вертолета до оси несущего винта, а второй вход блока расчета прогнозируемой скорости полета вертолета соединен через переключатель блоков автопилота функций автоматической стабилизации по тангажу, высоте и скорости по параметру текущего значения угла тангажа, а выход блока прогнозируемой скорости полета вертолета по параметру заданной скорости полета вертолета и выход блока системы автоматического управления полетом по параметру текущей скорости полета вертолета соединены с входом блока, индицирующим указатель скорости полета вертолета, представляя указатель скорости полета вертолета с числовой шкалой, индексом указателя текущей скорости полета вертолета, индексом указателя заданной скорости полета вертолета, выход которого соединен с генератором символов, который выполнен с возможностью индикации прибора указателя скорости полета вертолета с числовой шкалой и индексом указателя текущей скорости полета вертолета и индексом указателя заданной скорости полета вертолета, представленных в виде узких тонких пластин с заостренным концом, установленных с возможностью вращения относительно оси прибора указателя скорости полета вертолета., отличающийся тем, что дополнительно снабжен: - блоком объемной геометрической формы индекса "Самолет", - блоком подготовки к визуализации индекса "Самолет" в вертикальном нисходящем маневре соосного вертолета, - блоком логических переключателей, - переключателем вывода на индикационное поле экрана изображение объемного индекса "Самолет" в вертикальном нисходящем маневре соосного вертолета, - переключателем вывода на индикационное поле экрана изображение индекса "Самолет" и индекса "Лидер", - блоком, индицирующим на индикационном поле экрана объемный индекс "Самолет" в вертикальном нисходящем маневре соосного вертолета, причем выход блока объемной геометрической формы индекса "Самолет" соединен с входом блока системы автоматического управления полетом по параметрам: - координат крайней точки левого крыла вертолета, - координат крайней точки правого крыла вертолета, - координат крайней верхней точки киля вертолета, - координат крайней нижней точки киля вертолета, - координат передней носовой точки вертолета, - координаты центра индикационного поля вдоль вертикальной оси, - координаты центра индикационного поля вдоль боковой оси, предельно-минимальной высоты полета вертолета при выходе из вертикального нисходящего маневра соосного вертолета, - предельно-минимального значения угла тангажа, первый выход блока траекторного вычислителя соединен с блоком системы автоматического управления полетом по вычисляемым параметрам системы дифференциальных уравнений пространственного движения вертолета: проекций вектора скорости полета вертолета на оси земной системы координат, пространственного положения центра масс вертолета в осях земной системы координат по дальности, высоте, боковому отклонению, проекций вектора угловой скорости вертолета в осях связанной системы координат, модуля вектора угловой скорости вращения вертолета, значений угла тангажа, угла рыскания, угла крена, угла поворота траектории, угла наклона траектории, второй выход блока траекторного вычислителя соединен с первым входом блока подготовки к визуализации индекса "Самолет" в вертикальном нисходящем маневре соосного вертолета по параметру вычисляемого значения пространственного положения центра масс вертолета по высоте в осях земной системы координат в вертикальном нисходящем маневре соосного вертолета, второй вход блока подготовки к визуализации индекса "Самолет" в вертикальном нисходящем маневре соосного вертолета соединен с блоком системы автоматического управления полетом по параметрам текущего угла поворота траектории, текущего угла тангажа, текущего угла рыскания, текущего угла крена, координат крайней точки левого крыла вертолета, координат крайней точки правого крыла вертолета, координат крайней верхней точки киля вертолета, координат крайней нижней точки киля вертолета, координат передней носовой точки вертолета, координаты центра индикационного поля вдоль вертикальной оси, координаты центра индикационного поля вдоль боковой оси, причем выход блока подготовки к визуализации индекса "Самолет" в вертикальном нисходящем маневре соосного вертолета соединен с первым входом блока логических переключателей по параметру вычисленного значения пространственного положения центра масс вертолета по высоте в осях земной системы координат в вертикальном нисходящем маневре соосного вертолета, второй вход блока логических переключателей соединен с блоком системы автоматического управления полетом по параметру предельно-минимального значения угла тангажа, параметру предельно-минимальной высоты полета вертолета при выходе из вертикального нисходящего маневра соосного вертолета и параметру текущего значения угла тангажа, первый выход блока логических переключателей соединен через переключатель вывода на индикационное поле экрана изображение объемного индекса "Самолет" в вертикальном нисходящем маневре соосного вертолета с блоком, индицирующим на индикационном поле экрана объемный индекс "Самолет" в вертикальном нисходящем маневре соосного вертолета, второй выход блока логических переключателей соединен через переключатель вывода на индикационное поле экрана изображение индекса "Самолет" и индекса "Лидер" с блоком, индицирующим на индикационном поле экрана подвижный индекс неуправляемый летчиком "Лидер", и блоком, индицирующим на индикационном поле экрана подвижный индекс управляемый летчиком "Самолет", причем при включении переключателя вывода на индикационное поле экрана изображение объемного индекса "Самолет" в вертикальном нисходящем маневре соосного вертолета включается блок, индицирующий на индикационном поле экрана объемный индекс "Самолет" в вертикальном нисходящем маневре соосного вертолета, одновременно отключается переключатель вывода на индикационное поле экрана изображение индекса "Самолет" и индекса "Лидер", и отключаются блок, индицирующий на индикационном поле экрана подвижный индекс неуправляемый летчиком "Лидер", и блок, индицирующий на индикационном поле экрана подвижный индекс управляемый летчиком "Самолет", при отключении переключателя вывода на индикационное поле экрана изображение объемного индекса "Самолет" в вертикальном нисходящем маневре соосного вертолета отключается блок, индицирующий на индикационном поле экрана объемный индекс "Самолет" в вертикальном нисходящем маневре соосного вертолета, одновременно включается переключатель вывода на индикационное поле экрана изображение индекса "Самолет" и индекса "Лидер", и включаются блок, индицирующий на индикационном поле экрана подвижный индекс неуправляемый летчиком "Лидер", и блок, индицирующий на индикационном поле экрана подвижный индекс управляемый летчиком "Самолет", причем, когда выполняется условие, при котором значение текущего угла тангажа меньше или равно значению предельно-минимального угла тангажа, и, одновременно, вычисленное значение пространственного положения центра масс вертолета в осях земной системы координат по высоте больше или равно значения предельно-минимальной высоты полета вертолета при выходе из вертикального нисходящего маневра соосного вертолета, то включается переключатель вывода на индикационное поле экрана изображение объемного индекса "Самолет" в вертикальном нисходящем маневре соосного вертолета, если значение текущего угла тангажа больше значения предельно-минимального угла тангажа, или вычисленное значение пространственного положения центра масс вертолета в осях земной системы координат по высоте меньше значения предельно-минимальной высоты полета вертолета при выходе из вертикального нисходящего маневра соосного вертолета, то отключается переключатель вывода на индикационное поле экрана изображение объемного индекса "Самолет" в вертикальном нисходящем маневре соосного вертолета, и включается переключатель вывода на индикационное поле экрана изображение индекса "Самолет" и индекса "Лидер".
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2011 |
|
RU2474862C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2018 |
|
RU2711196C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2019 |
|
RU2716886C1 |
| СИСТЕМА ИНДИКАЦИИ ВЗЛЕТА И ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2016 |
|
RU2647344C2 |
| ЯДЕРНОЕ ЭНЕРГЕТИЧЕСКОЕ УСТРОЙСТВО | 1996 |
|
RU2107340C1 |

