Предлагаемое устройство относится к вычислительным системам, используемым в автоматике, и предназначено для управления движением транспортных средств в условиях населенного пункта.
Известны системы и устройства для управления движением транспортных средств и регулирования уличного движения (авт. свид. СССР №№218708, 510957, 1587558; патенты РФ №№2022367, 2153194; патенты США №№4484192, 5486822, 5497149, 5519392; патенты Японии №№06251294, 07029098, 07134795, 08044997, 08221687, 09311996, 09062996 и другие).
Из известных систем и устройств наиболее близким к предлагаемому является устройство, реализующее "Способ определения оптимального маршрута движения транспортного средства в условиях населенного пункта" (патент РФ №2153194, G08G 1/096, 1999), которое и выбрано в качестве прототипа.
Указанное устройство основано на формировании электронной карты населенного пункта, и путем ее совмещения с данными скоростного режима движения в населенном пункте создается электронная скоростная карта этого населенного пункта, которые вводятся в память компьютера центральной станции и транслируются пользователем при помощи радиосигналов. При необходимости корректируется электронная скоростная карта путем внесения уточненных значений скоростей на каждой дороге с учетом информационных навигационных сообщений транспортных средств о координатах и скорости их перемещения, принятых центральной станцией. Передается эта уточненная информация пользователям, с учетом которой при помощи компьютера пользователя определяются наиболее оптимальные по времени движения до заданного пункта назначения маршруты. При этом обеспечивается визуализация на экране дисплея пользователя этих маршрутов. В процессе движения по выбранному маршруту в случае изменения параметров электронной скоростной карты производится коррекция оптимальных маршрутов движения до пункта назначения.
Однако известное устройство не обеспечивает эффективный обмен дискретной информацией по радиоканалам между центральной станцией и транспортными средствами.
Технической задачей изобретения является повышение эффективности обмена дискретной информации по радиоканалам между центральной станцией и транспортными средствами путем дуплексной радиосвязи и использования сложных сигналов с фазовой манипуляцией.
Поставленная задача решается тем, что устройство для определения оптимального маршрута движения транспортного средства в условиях населенного пункта, содержащее созвездие навигационных спутников, на транспортном средстве последовательно включенные приемник навигационного сигнала с антенной, приемопередающее устройство и компьютер пользователя, являющийся бортовой ЭВМ и связанный с приемником навигационного сигнала и экраном дисплея пользователя, на центральной станции приемопередающее устройство, связанное с компьютером, снабжено ретранслятором, установленным в центральной части населенного пункта, при этом приемопередающее устройство транспортного средства выполнено в виде последовательно подключенных к компьютеру генератора высокочастотного колебания, фазового манипулятора, второй вход которого через источник дискретного сообщения соединен с компьютером, первого смесителя, второй вход которого соединен с выходом первого гетеродина, усилителя первой промежуточной частоты, первого усилителя мощности, циркулятора, вход-выход которого связан с приемопередающей антенной, второго усилителя мощности, второго смесителя, второй вход которого соединен с выходом второго гетеродина, усилителя второй промежуточной частоты, перемножителя, второй вход которого соединен с выходом второго гетеродина, полосового фильтра и фазового детектора, второй вход которого соединен с выходом первого гетеродина, а выход подключен к компьютеру, приемопередающее устройство центральной станции выполнено в виде последовательно подключенных к компьютеру генератора высокочастотного колебания, фазового манипулятора, второй вход которого через источник дискретного сообщения соединен с компьютером, второго смесителя, второй вход которого соединен с выходом второго гетеродина, усилителя промежуточной частоты, второго усилителя мощности, циркулятора, вход-выход которого связан с приемопередающей антенной, первого усилителя мощности, первого смесителя, второй вход которого соединен с выходом первого гетеродина, усилителя первой промежуточной частоты, перемножителя, второй вход которого соединен с выходом первого гетеродина, полосового фильтра и фазового детектора, второй вход которого соединен с выходом второго гетеродина, а выход подключен к компьютеру.
Система определения оптимального маршрута движения транспортного средства изображена на фиг.1. Структурная схема бортовой аппаратуры транспортного средства представлена на фиг.2. Структурная схема аппаратуры центральной станции представлена на фиг.3. Частотная диаграмма, иллюстрирующая процесс преобразования сигналов, изображена на фиг.4.
Устройство для определения оптимального маршрута движения транспортного средства в условиях населенного пункта содержит созвездие навигационных спутников 1.j (j=1, 2,...,24), транспортные средства 2.i (i=1, 2,...,n), центральную станцию 3, ретранслятор 4, установленный в центральной части населенного пункта, фрагмент 5 дорожной сети населенного пункта, текущий 6 и конечный 7 пункт назначения.
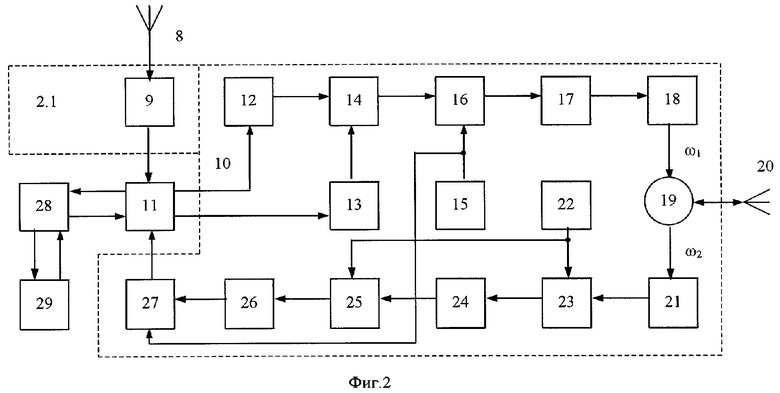
Бортовая аппаратура транспортного средства содержит приемник 9 навигационного сигнала с приемной антенной 8, подключенный к компьютеру 11 пользователя, являющемуся бортовой ЭВМ, приемопередающее устройство 10, содержащее последовательно подключенные к компьютеру 11 генератор 12 высокочастотного колебания, фазовый манипулятор 14, второй вход которого через источник 13 дискретного сообщения соединен с выходом компьютера 11, первый смеситель 16, второй вход которого соединен с выходом первого гетеродина 15, усилитель 17 первой промежуточной частоты, первый усилитель 18 мощности, циркулятор 19, вход-выход которого связан с приемопередающей антенной 20, второй усилитель 21 мощности, второй смеситель 23, второй вход которого соединен с выходом второго гетеродина 22, усилитель 24 второй промежуточной частоты, перемножитель 25, второй вход которого соединен с выходом гетеродина 22, полосовой фильтр 26, фазовый детектор 27, второй вход которого соединен с выходом первого гетеродина 15, компьютер 11, вход-выход которого через экран 28 дисплея связан с пользователем 29.
Аппаратура центральной станции 3 содержит последовательно подключенные к компьютеру 39 генератор 41 высокочастотного колебания, фазовый манипулятор 42, второй вход которого через источник 40 дискретных сообщений соединен с выходом компьютера 39, второй смеситель 44, второй вход которого соединен с выходом второго гетеродина 43, усилитель 45 промежуточной частоты, второй усилитель 46 мощности, циркулятор 31, вход-выход которого связан с приемопередающей антенной 30, первый усилитель 32 мощности, первый смеситель 34, второй вход которого соединен с выходом первого гетеродина 33, усилитель 35 первой промежуточной частоты, перемножитель 36, второй вход которого соединен с выходом гетеродина 33, полосовой фильтр 37 и фазовый детектор 38, второй вход которого соединен с выходом гетеродина 43, а выход подключен к компьютеру 39.
Устройство работает следующим образом.
На центральной станции 3 формируется электронная карта населенного пункта и вводится в компьютер 39 этой станции база данных полученной электронной карты. Накапливаются предварительно полученные и обработанные с помощью специального математического обеспечения (СМО) статистические данные о реально сложившихся скоростях на дорогах данного населенного пункта, по которым устанавливается среднестатистический скоростной режим движения на каждой дороге, полученный по средним значениям скоростей или по медиане. Совмещается электронная карта города и полученные данные скоростного режима с целью формирования электронной скоростной карты этого населенного пункта, база данных которой вводится в память компьютера 39 центральной станции 3.
Определяются координаты и скорости транспортных средств 2.i (i=1, 2,...,n) при их перемещении в населенном пункте с помощью установленных на них приемников 9 навигационного сигнала, полученного от созвездия навигационных спутников 1.j (j=1, 2,...,24).
Для передачи полученной информации на центральную станцию 3 с помощью бортового компьютера 11 включается генератор 12 высокочастотного колебания

где νc1, ωc, ϕc1, Tc1 - амплитуда, несущая частота, начальная фаза и длительность высокочастотного колебания.
Сформированное колебание Uc1(t) с выхода генератора 12 поступает на первый вход фазового манипулятора 14, на второй вход которого подается модулирующий код M1(t) с выхода источника 13 дискретных сообщений. Модулирующий код M1(t) в цифровой форме содержит сведения о координатах и скорости транспортного средства. На выходе фазового манипулятора 14 образуется фазоманипулированный (ФМн) сигнал


где ϕc1={0, π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с модулирующим кодом M1(t).
Этот сигнал поступает на первый вход смесителя 16, на второй вход которого подается напряжение первого гетеродина 15

На выходе смесителя 16 образуются напряжения комбинационных частот. Усилителем 17 выделяется напряжение первой промежуточной (суммарной) частоты


где υпр1=1/2К1*υс1*υг1;
K1 - коэффициент передачи смесителя;
ωпр1=ωc+ωг1=ω1 - первая промежуточная частота;
ϕпр1=ϕc1+ϕг1,
которое усиливается в усилителе 18 мощности и через циркулятор 19 поступает в приемопередающую антенну 20 и излучается в эфир.
Сигнал Uпр1(t) улавливается приемопередающей антенной 30 на центральной станции 3, усиливается усилителем 32 мощности и поступает на первый вход смесителя 34, на второй вход которого подается напряжение гетеродина 33 Uг1(t). На выходе смесителя 34 образуются напряжения комбинационных частот. Усилителем 35 выделяется напряжение второй промежуточной (разностной) частоты


где υпр2=1/2K1·υпр1·υг1;
ωпр2=ωпр1-ωг1 - вторая промежуточная частота;
ϕпр2=ϕпр1-ϕг1,
которое поступает на первый вход перемножителя 36, на второй вход которого подается напряжение гетеродина 33 Uг1(t). На выходе перемножителя 36 образуется напряжение


где υ2=1/2К2·υпр2·υг1;
K2 - коэффициент передачи перемножителя,
которое выделяется полосовым фильтром 37 и поступает на первый вход фазового детектора 38. На второй вход фазового детектора 38 в качестве опорного напряжения подается напряжение гетеродина 43

В результате синхронного детектирования на выходе фазового детектора 38 образуется низкочастотное напряжение

где υн1=1/2К3·υ2·υг2;
К3 - коэффициент передачи фазового детектора,
пропорциональное модулирующему коду M1(t), которое поступает в компьютер 39 центральной станции 3, где происходит фиксация координат и скорости движения транспортного средства в данном населенном пункте. Такие данные поступают от всех транспортных средств, находящихся в данном населенном пункте.
На центральной станции 3 производится анализ полученных текущих навигационных информационных сообщений с выделением среди них тех скоростей движения транспортных средств, которые группируются в области полученной ранее среднестатистической оценки. При этом учитываются установленные на соответствующих дорогах скоростные ограничения. В памяти компьютера 39 центральной станции 3 производится уточнение данных о скоростях передвижения транспортных средств на дорогах, и с учетом этого уточнения при необходимости корректируется электронная скоростная карта населенного пункта.
Для периодической передачи из центральной станции 3 на приемные устройства пользователей информации об электронной скоростной карте населенного пункта и текущих поправок к ней в случае изменения ее параметров включается генератор 41, который формирует высокочастотное колебание


которое поступает на первый вход фазового манипулятора 42, на второй вход которого подается модулирующий код M2(t) с выхода источника 40 дискретных сообщений. Модулирующий код M2(t) в цифровой форме содержит сведения о электронной скоростной карте населенного пункта. На выходе фазового манипулятора 42 образуется ФМн-сигнал


Этот сигнал поступает на первый вход смесителя 44, на второй вход которого подается напряжение Uг2(t) гетеродина 43. На выходе смесителя 44 образуются напряжения комбинационных частот. Усилителем 45 выделяется напряжение промежуточной (разностной) частоты


где υпр3=1/2K1·υc2·υг2;
ωпр=ωг2-ωc=ω2 - промежуточная частота;
ϕпр3=ϕг2-ϕс2,
которое усиливается в усилителе 46 мощности и через циркулятор 31 поступает в приемопередающую антенну 30 и излучается в эфир.
Сигнал Uпр3(t) улавливается приемопередающей антенной 20 на транспортном средстве, усиливается усилителем 21 мощности и поступает на первый вход смесителя 23, на второй вход которого подается напряжение Uг2(t) гетеродина 22. На выходе смесителя 23 образуются напряжения комбинационных частот. Усилителем 24 выделяется напряжение второй промежуточной (разностной) частоты


где υпр4=1/2K1·υпр3·υг2;
ωпр2=ωг2-ω2 - вторая промежуточная частота;
ϕпр4=ϕг2-ϕпр3,
которое поступает на первый вход перемножителя 25, на второй вход которого подается напряжение Uг2(t) гетеродина 22. На выходе перемножителя 25 образуется напряжение


где υ4=1/2К2·υпр4·υг2;
которое выделяется полосовым фильтром 26 и поступает на первый (информационный) вход фазового детектора 27. На второй вход фазового детектора 27 в качестве опорного напряжения подается напряжение Uг1(t) гетеродина 16. В результате синхронного детектирования на выходе фазового детектора 27 образуется низкочастотное напряжение

где υн2=1/2К3·υ4·υг1;
пропорциональное модулирующему коду М2(t), которое поступает в компьютер 11 пользователя.
Пользователи при этом получают наиболее достоверную информацию о текущих значениях скоростного режима движения по населенному пункту.
Внесение в компьютер 11 пользователя 29 данных о пункте назначения 7 позволяет определить наиболее оптимальный по времени движения маршрут и индицирует на экране 28 дисплея рекомендуемый маршрут и параметры текущего скоростного режима в населенном пункте.
Для технической реализации предлагаемого устройства могут использоваться:
- модифицированные 14-канальные навигационные приборы серии СН, которые работают как по сигналам навигационных спутников российской навигационной системы ГЛОНАСС и/или американской системы GPS (Навстар), что обеспечивает более точное и устойчивое определение координат транспортного средства в сложных условиях современного города;
- средства дуплексной радиосвязи;
- в качестве электронно-вычислительной техники IBM компьютер;
- в качестве средств водительского интерфейса жидкокристаллический дисплей и сенсорный планшет для управления курсором.
Таким образом, предлагаемое устройство по сравнению с прототипом и другими техническими решениями аналогичного назначения обеспечивает повышение эффективности обмена дискретной информацией по радиоканалам между центральной станцией и транспортными средствами. Это достигается использованием ретранслятора, двух частот ω1 и ω2, обеспечивающих соответствующую развязку, и сложных фазоманипулированных сигналов.
Указанные сигналы позволяют применять новый вид селекции - структурную селекцию. Интересной особенностью радиоканалов, использующих ФМн-сигналы, являются их адаптивные свойства: с уменьшением числа работающих радиостанций транспортных средств помехоустойчивость оставшихся возрастает.
С точки зрения обнаружения ФМн-сигналы обладают высокой энергетической и структурной скрытностью.
Энергетическая скрытность данных сигналов обусловлена их высокой сжимаемостью во времени или по спектру при оптимальной обработке, что позволяет снизить мгновенную излучаемую мощность. Вследствие этого ФМн-сигнал в точке приема может оказаться замаскированным шумами. Причем энергия ФМн-сигнала отнюдь не мала, она просто распределена по частотно-временной области так, что в каждой точке этой области мощность сигнала меньше мощности шумов и помех.
Структурная скрытность ФМн-сигналов обусловлена большим разнообразием их форм и значительными диапазонами изменения значений параметров, что затрудняет оптимальную или хотя бы квазиоптимальную обработку ФМн-сигналов априорно неизвестной структуры с целью повышения чувствительности приемника.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНОГО МАРШРУТА ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА В УСЛОВИЯХ НАСЕЛЕННОГО ПУНКТА | 2004 |
|
RU2266571C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДОВ | 2007 |
|
RU2360266C1 |
| СИСТЕМА ОПОЗНАВАНИЯ АВТОТРАНСПОРТА | 2005 |
|
RU2297045C1 |
| ПРОТИВОУГОННОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2302953C1 |
| СИСТЕМА ДИСПЕТЧЕРСКОГО КОНТРОЛЯ И УПРАВЛЕНИЯ ИНКАССАТОРСКИМИ МАШИНАМИ | 2005 |
|
RU2303293C2 |
| СПОСОБ СОВМЕЩЕННОЙ РАДИОСВЯЗИ И РАДИОНАВИГАЦИИ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ, ДЛЯ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2007 |
|
RU2348560C1 |
| СПОСОБ СОВМЕЩЕННОЙ РАДИОСВЯЗИ И РАДИОНАВИГАЦИИ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ, ДЛЯ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2004 |
|
RU2278047C1 |
| УСТРОЙСТВО ЗАЩИТЫ ТРАНСПОРТНОГО СРЕДСТВА ОТ УГОНА И КРАЖ | 2004 |
|
RU2262457C1 |
| СИСТЕМА ДЛЯ КОНТРОЛЯ И РЕГИСТРАЦИИ ЭКСПЛУАТАЦИОННЫХ ПОКАЗАТЕЛЕЙ АВТОТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2267811C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА АВАРИЙНОГО И ЭКОЛОГИЧЕСКОГО МОНИТОРИНГА ОКРУЖАЮЩЕЙ СРЕДЫ РЕГИОНА | 2006 |
|
RU2310895C1 |


Изобретение относится к технике управления движением транспортных средств в условиях населенного пункта. Используются созвездие навигационных спутников и ретранслятор. Бортовая аппаратура транспортного средства содержит приемник навигационного сигнала с антенной, приемопередающее устройство и компьютер пользователя. В состав приемопередающего устройства входят генератор высокочастотного колебания, источник дискретного сообщения, фазовый манипулятор, два гетеродина, два смесителя, усилитель первой промежуточной частоты, два усилителя мощности, циркулятор, приемопередающая антенна, усилитель второй промежуточной частоты, перемножитель, полосовой фильтр, фазовый детектор, экран дисплея пользователя. Аппаратура центральной станции содержит компьютер и приемопередающее устройство. В состав приемопередающего устройства входят приемопередающая антенна, циркулятор, два усилителя мощности, два гетеродина, два смесителя, усилитель первой промежуточной частоты, перемножитель, полосовой фильтр, фазовый детектор, источник дискретного сообщения, генератор высокочастотного колебания, фазовый манипулятор и усилитель промежуточной частоты. Устройство реализует дуплексную радиосвязь между центральной станцией и транспортными средствами с применением сложных сигналов с фазовой манипуляцией. Изобретение позволяет повысить эффективность обмена дискретной информацией по радиоканалам между центральной станцией и транспортными средствами. 4 ил.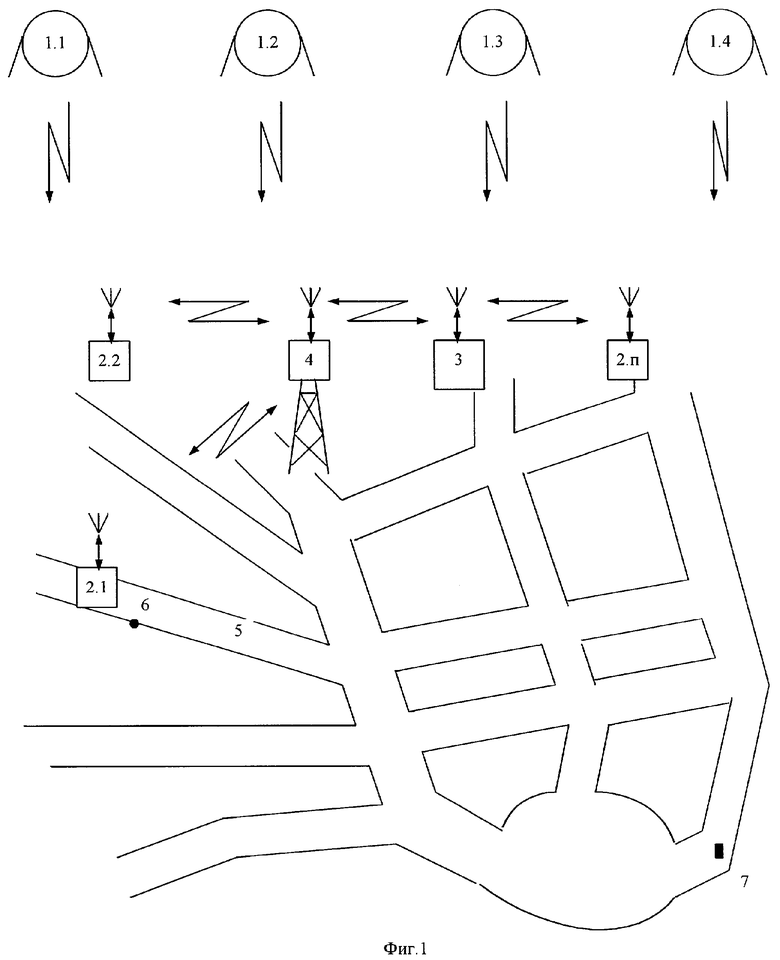
Устройство для определения оптимального маршрута движения транспортного средства в условиях населенного пункта, содержащее созвездие навигационных спутников, на транспортном средстве последовательно включенные приемник навигационного сигнала с антенной, приемопередающее устройство и компьютер пользователя, являющийся бортовой ЭВМ и связанный с приемником навигационного сигнала и экраном дисплея пользователя, на центральной станции приемопередающее устройство, связанное с компьютером, отличающееся тем, что оно снабжено ретранслятором, установленным в центральной части населенного пункта, при этом приемопередающее устройство транспортного средства выполнено в виде последовательно подключенных к компьютеру генератора высокочастотного колебания, фазового манипулятора, второй вход которого через источник дискретного сообщения соединен с компьютером, первого смесителя, второй вход которого соединен с выходом первого гетеродина, усилителя первой промежуточной частоты, первого усилителя мощности, циркулятора, вход-выход которого связан с приемопередающей антенной, второго усилителя мощности, второго смесителя, второй вход которого соединен с выходом второго гетеродина, усилителя второй промежуточной частоты, перемножителя, второй вход которого соединен с выходом второго гетеродина, полосового фильтра и фазового детектора, второй вход которого соединен с выходом первого гетеродина, а выход подключен к компьютеру, приемопередающее устройство центральной станции выполнено в виде последовательно подключенных к компьютеру генератора высокочастотного колебания, фазового манипулятора, второй вход которого через источник дискретного сообщения соединен с компьютером, второго смесителя, второй вход которого соединен с выходом второго гетеродина, усилителя промежуточной частоты, второго усилителя мощности, циркулятора, вход-выход которого связан с приемопередающей антенной, первого усилителя мощности, первого смесителя, второй вход которого соединен с выходом первого гетеродина, усилителя первой промежуточной частоты, перемножителя, второй вход которого соединен с выходом первого гетеродина, полосового фильтра и фазового детектора, второй вход которого соединен с выходом второго гетеродина, а выход подключен к компьютеру.
| СПОСОБ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНОГО МАРШРУТА ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА В УСЛОВИЯХ НАСЕЛЕННОГО ПУНКТА | 1999 |
|
RU2153194C1 |
| УСТРОЙСТВО ВЫБОРА ОПТИМАЛЬНОГО МАРШРУТА МАНЕВРА | 1992 |
|
RU2045773C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ АВТОМОБИЛЕЙ | 1990 |
|
RU2022367C1 |
| ТЕРРИТОРИАЛЬНАЯ СИСТЕМА КОНТРОЛЯ ТРАНСПОРТИРОВКИ ЭКОЛОГИЧЕСКИ ОПАСНЫХ ГРУЗОВ | 1999 |
|
RU2173889C2 |

