Предлагаемый способ относится к вычислительным системам, используемым в автоматике, и предназначен для управления движением транспортных средств в условиях населенного пункта.
Известны способы регулирования уличного движения (авт. свид. СССР №218.708 от 18.12.1966 г., G 01 D 5/12; №510.957 от 22.05.1973 г., G 08 G 1/08; №1. 587.558 от 04.10.1988 г., G 08 G 1/08), основанные на магнитометрическом принципе индикации движения транспортных средств с последующей обработкой дорожной информации. По результатам обработки выдаются команды светофорам на перекрестках сильно перегруженных магистралей города.
Недостатком этих способов является низкая эффективность действия в масштабе всего города, так как анализ дорожной ситуации и управляющие воздействия на светофоры ограничены расстоянием между двумя перекрестками на одной улице. При этом платой за достижение эффекта на сильно загруженной улице является увеличение времени простоя автотранспорта у светофора на пересекающей ее улице.
Известен также способ регулирования движения транспортных средств (патент РФ №2.022.367 от 18.07.1990 г., G 08 G 1/01), при котором они посылают на светофор ультразвуковой сигнал. Транспортным средством принимается со светофора ответный сигнал. В ответном сигнале на транспортное средство посылается информация о диапазоне скорости, которой следует придерживаться транспортному средству, чтобы прибыть к регулируемому перекрестку, когда на светофоре будет разрешающий сигнал.
Недостатком этого способа является ограничение скорости движения транспортного средства, позволяющее избежать простоя на регулируемом перекрестке, но не сокращающее общее время движения к пункту назначения.
Известны способы определения кратчайшего маршрута движения (патенты США №4.484.192 от 20.11.1984 г., 340/995; №5.486.822 от 23.01.1986 г., 340/995, G 08 G 1/123), в которых предложено использовать находящуюся в памяти бортовой ЭВМ карту дорог города, информация о точке отправления и точке назначения вводится в ЭВМ водителем, затем ЭВМ рассчитывает кратчайший путь.
Недостатками этих способов является отсутствие учета степени загруженности дорог города, оптимальным принимается маршрут с наименьшим расстоянием до пункта назначения.
Известны способы определения кратчайшего маршрута движения (патенты Японии №09062996 от 03.07.1997 г.; №67114698 от 02.05.1995 г.; №07134795 от 23.05.1995 г., G 08 G 1/09), в которых ЭВМ, используя находящуюся в памяти бортовой ЭВМ карту дорог города, обеспечивает управление транспортным средством на маршруте.
Недостатком этих способов также является отсутствие учета степени загруженности дорог города, а оптимальным принимается маршрут с наименьшим расстоянием до пункта назначения.
Известны способы повышения безопасности уличного движения, реализуемые в устройствах (патенты Японии №06251294 от 09.09.1994 г.; №06004798 от 14.01.1994 г., 339 (1487); №09.311.996 от 02.12.1997 г., G 08 G 1/09), которые определяют координаты транспортного средства, его скорость движения, получают по радиоканалу информацию о произошедшей впереди аварии или заторе на дороге, рассчитывают безопасную для транспортного средства скорость и поддерживают его скорость в допустимом диапазоне при подъезде и движении в опасной зоне.
Недостатком этих способов также является отсутствие определения оптимального по времени маршрута движения к пункту назначения.
При отсутствии спутниковой навигации возможно использование базы данных электронных карт, т.е. цифровой информации, описывающей местность или город (см., например, статью В.Наймана «Автомобильная навигация. Принципы. Состояние. Возможности» в журнале «12 вольт», №3(20), 1999 г., г.Москва). Однако известные системы не учитывают текущую ситуацию, складывающуюся на дорогах населенного пункта, что не позволяет осуществлять корректировку параметров движения транспортного средства.
Известен способ, реализуемый в навигационном приборе для поиска оптимального маршрута движения транспортных средств, передвигающихся регулярно между одними и теми же точками города (патенты Японии №06266998 от 22.09.1994 г.; №08221687 от 30.08.1996 г.), в котором при движении транспортного средства измеряются его координаты и скорость движения. Накапливается по этим измерениям статистическая информация, обрабатывается бортовой ЭВМ и на дисплее отображается оптимальный маршрут движения.
В этом способе не предусматривается создание электронной скоростной карты всего населенного пункта с реальным режимом скоростей на его дорогах с возможным внесением в нее текущих коррекций параметров, обусловленных изменением скоростных режимов на дорогах. Определение оптимального маршрута производится с использованием только статической информации, полученной именно этим транспортным средством.
Известен способ, который реализован в автомобильном навигационном приборе, имеющем память для хранения карты местности, бортовую ЭВМ, дисплей и приемник дорожной информации (патент Японии №08044997 от 16.02.1996 г.). Прибор определяет текущие координаты транспортного средства, вычисляет кратчайший маршрут от начальной до конечной точки и отображает его на дисплее. Приемник дорожной информации получает извне радиосообщение с информацией о дорожных «пробках» и затруднениях в движении на дорогах. Эта информация отображается на дисплее изменением окраски дороги в местах «пробок» и затруднения движения, причем степень изменения окраски соответствует степени затруднения движения транспортных средств.
Недостатком указанного способа также является отсутствие определения оптимального по времени маршрута.
Известен также способ, который реализован в устройстве для сбора информации о дорожных «пробках» (патент Японии №07029098 от 31.01.1995 г.) с целью их обнаружения и объезда. Известный способ заключается в том, что специальные транспортные средства, снабженные навигационным прибором и радиоприемным/передающим устройством, передвигаются по дорогам города и передают базовой станции данные о своих координатах и скорости движения. Базовая станция производит анализ поступившей информации, строит карту «пробок» и определяет маршрут объезда «пробки». Карту «пробок» и рекомендуемый маршрут ее объезда базовая станция передает по радиоканалу водителям транспортных средств.
Недостатком этого способа является отсутствие построения скоростной карты города и определения оптимального по времени маршрута движения.
Наиболее близким по технической сущности и достигаемому результату к предлагаемому является «Способ определения оптимального маршрута движения транспортного средства в условиях населенного пункта» (патент РФ №2.153.194, G 08 G 1/096, 1999 г.).
Указанный способ заключается в формировании электронной карты населенного пункта и путем ее совмещения с данными скоростного режима движения в населенном пункте создают электронную скоростную карту этого населенного пункта, которые вводят в память компьютера центральной станции и транслируют пользователям при помощи радиосигналов. При необходимости корректируют электронную скоростную карту путем внесения уточненных значений скоростей на каждой дороге с учетом информационных навигационных сообщений транспортных средств о координатах и скорости их перемещения, принятых центральной станцией. Передают пользователям эту уточненную информацию, с учетом которой при помощи компьютера пользователя определяют наиболее оптимальные по времени движения до заданного пункта назначения маршруты. При этом обеспечивается визуализация на экране дисплея пользователя этих маршрутов. В процессе движения по выбранному маршруту в случае изменения параметров электронной скоростной карты производят коррекцию оптимальных маршрутов движения до пункта назначения.
Однако известный способ не обеспечивает эффективный обмен дискретной информацией по радиоканалам между центральной станцией и транспортными средствами.
Технической задачей изобретения является повышение эффективности обмена дискретной информацией по радиоканалам между центральной станцией и транспортными средствами путем дуплексной радиосвязи и использования сложных сигналов с фазовой манипуляцией.
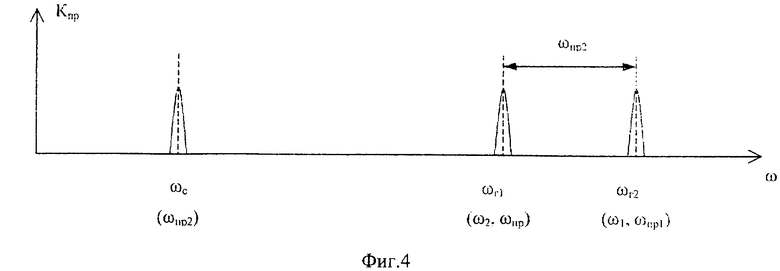
Поставленная задача решается тем, что согласно способу определения маршрута движения транспортного средства в условиях населенного пункта, заключающемуся в том, что формируют электронную карту населенного пункта и вводят в компьютер центральной станции базу данных этой электронной карты, которую транслируют пользователям при помощи радиосигналов, на центральной станции принимают навигационные информационные сообщения о координатах и скорости перемещения движущихся транспортных средств в данном населенном пункте и фиксируют координаты и скорость движения этих средств, по полученным координатам и скорости формируют рекомендуемые маршруты перемещения транспортных средств, на основании предварительно полученных статистических данных о реально сложившихся скоростях движения транспортных средств в населенном пункте устанавливают среднестатистический скоростной режим движения на каждой его дороге, оценку которого определяют или по среднему значению скоростей, или по медиане, затем путем совмещения сформированной электронной карты населенного пункта и полученных данных скоростного режима движения в нем создают электронную скоростную карту этого населенного пункта и вводят в память компьютера центральной станции базу данных созданной электронной скоростной карты, транслируют ее пользователям, на центральной станции на основе анализа полученных текущих навигационных информационных сообщений выделяют информационные сообщения о транспортных средствах, скорости которых группируются в области упомянутой среднестатистической оценки, учитывая установленные на соответствующих дорогах скоростные ограничения, после чего, используя выделенные информационные сообщения, производят уточнение данных о скоростях перемещения транспортных средств на дорогах в памяти компьютера центральной станции и при необходимости корректируют электронную скоростную карту населенного пункта путем внесения уточненных значений скоростей на каждой дороге, передают радиосигналы, несущие информацию об уточненных параметрах электронной скоростной карты населенного пункта пользователям, в компьютер пользователя вводят данные о пункте назначения, а рекомендуемые маршруты в качестве наиболее оптимальных по времени движения до заданного пункта назначения определяют при помощи компьютера пользователя с учетом уточненных параметров электронной скоростной карты населенного пункта, принимаемой пользователем от центральной станции с возможностью визуализации на экране дисплея пользователя этих маршрутов на электронной карте дорог населенного пункта с индикацией на ней информационных сообщений о значениях скоростей на дорогах населенного пункта и отображением текущего положения транспортного средства, в процессе движения по выбранному маршруту в случае изменения параметров электронной скоростной карты населенного пункта производят коррекцию оптимальных маршрутов движения до пункта назначения, дуплексную радиосвязь между центральной станцией и транспортным средством осуществляют радиосигналами с фазовой манипуляцией на двух частотах ω1 и ω2 непосредственно и/или через ретранслятор, установленный в центральной части населенного пункта, для чего на транспортном средстве формируют высокочастотное колебание на частоте ωс, манипулируют его по фазе на 180° в соответствии с модулирующим кодом M1(t), содержащим в цифровой форме сведения о координатах и скорости его движения, преобразуют по частоте с использованием частоты ωГ1 первого гетеродина, выделяют напряжение первой промежуточной частоты ωпр1, равной сумме частот ωпр1=ωс+ωГ1=ω1, усиливают его по мощности, излучают на частоте ω1 в эфир, принимают на центральной станции, усиливают по мощности, преобразуют по частоте с использованием частоты ωГ1 первого гетеродина, выделяют напряжение второй промежуточной частоты ωпр2, равное разности частот ωпр2=ωпр1-ωГ1, перемножают его с напряжением второго гетеродина, выделяют фазоманипулированный сигнал на частоте ωГ2 второго гетеродина, осуществляют синхронное его детектирование с использованием напряжения второго гетеродина, выделяют низкочастотное напряжение, пропорциональное модулирующему коду M1(t), и вводят его в компьютер, на центральной станции формируют высокочастотное колебание на частоте ωс, манипулируют его по фазе на 180° в соответствии с модулирующим кодом М2(t), содержащим в цифровой форме сведения о электронной скоростной карте населенного пункта, преобразуют по частоте с использованием частоты ωГ2 второго гетеродина, выделяют напряжение промежуточной частоты ωпр, равной разности частот ωпр=ωГ2-ωс=ω2, усиливают его по мощности, излучают в эфир на частоте ω2, принимают на транспортном средстве, усиливают по мощности, преобразуют по частоте с использованием частоты ωГ2 второго гетеродина, выделяют напряжение второй промежуточной частоты ωпр2, равное разности частот ωпр2=ωГ2-ω2, перемножают его с напряжением второго гетеродина, выделяют фазоманипулированный сигнал на частоте ωГ1 первого гетеродина, осуществляют синхронное его детектирование с использованием напряжения первого гетеродина, выделяют низкочастотное напряжение, пропорциональное модулирующему коду M2(t), и вводят его в компьютер, причем частоты выбирают следующим образом:
ωГ2-ωГ1=ωпр2=ωс,
ωГ1=ω2,
ωГ2=ω1=ωпр1.
Реализацию предлагаемого способа можно проиллюстрировать при помощи чертежей, где на фиг.1 изображена система определения оптимального маршрута движения транспортного средства, на фиг.2 представлена структурная схема бортовой аппаратуры транспортного средства, на фиг.3 представлена структурная схема аппаратуры центральной станции, на фиг.4 показана частотная диаграмма.
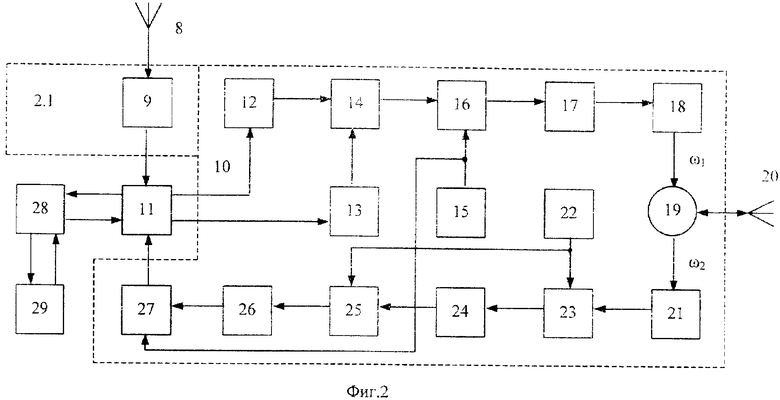
Система определения оптимального маршрута движения транспортного средства содержит созвездие навигационных спутников 1*j (j=1, 2, ..., 24), транспортные средства 2*i (i=1, 2, ..., n), центральную станцию 3, ретранслятор 4, установленный в центральной части населенного пункта, фрагмент 5 дорожной сети населенного пункта, текущий 6 и конечный 7 пункты назначения.
Бортовая аппаратура транспортного средства содержит приемник 9 навигационного сигнала с приемной антенной 8, подключенный к компьютеру 11 пользователя, являющемуся бортовой ЭВМ, приемопередающее устройство 10, содержащее последовательно подключенные к выходу компьютера 11 генератор 12 высокочастотного колебания, фазовый манипулятор 14, второй вход которого через источник 13 дискретного сообщения соединен с выходом компьютера 11, первый смеситель 16, второй вход которого соединен с выходом первого гетеродина 15, усилитель 17 первой промежуточной частоты, первый усилитель 18 мощности, циркулятор 19, вход-выход которого соединен с приемопередающей антенной 20, второй усилитель 21 мощности, второй смеситель 23, второй вход которого соединен с выходом второго гетеродина 22, усилитель 24 второй промежуточной частоты, перемножитель 25, второй вход которого соединен с выходом гетеродина 22, полосовой фильтр 26 и фазовый детектор 27, второй вход которого соединен с выходом первого гетеродина 15, компьютер 11, вход-выход которого через экран 28 дисплея связан с пользователем 29.
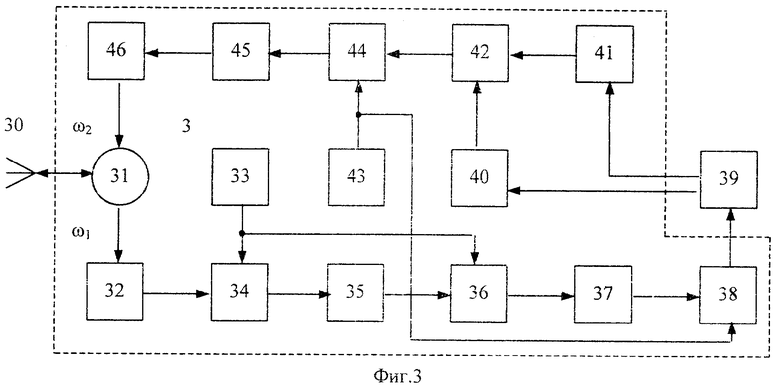
Аппаратура центральной станции 3 содержит последовательно подключенные к компьютеру 39 генератор 41 высокочастотного колебания, фазовый манипулятор 42, второй вход которого через источник 40 дискретных сообщений соединен с выходом компьютера 39, второй смеситель 44, второй вход которого соединен с выходом второго гетеродина 43, усилитель 45 промежуточной частоты, второй усилитель 46 мощности, циркулятор 31, вход-выход которого связан с приемопередающей антенной 30, первый усилитель 32 мощности, первый смеситель 34, второй вход которого соединен с выходом первого гетеродина 33, усилитель 35 первой промежуточной частоты, перемножитель 36, второй вход которого соединен с выходом гетеродина 33, полосовой фильтр 37 и фазовый детектор 38, второй вход которого соединен с выходом гетеродина 43, а выход подключен к компьютеру 39.
Реализация предлагаемого способа предполагает выполнение следующей последовательности операций:
1) Формирование на центральной станции 3 электронной карты населенного пункта и ввод в компьютер 39 этой станции базы данных полученной электронной карты.
2) Накопление предварительно полученных и обработанных с помощью специального математического обеспечения (СМО) статистических данных о реально сложившихся скоростях на дорогах данного населенного пункта, по которым устанавливают среднестатистический скоростной режим движения на каждой дороге, полученный по средним значениям скоростей или по медиане.
3) Совмещение электронной карты города и полученных данных скоростного режима с целью формирования электронной скоростной карты этого населенного пункта, базу данных которой вводят в память компьютера 39 центральной станции 3.
4) Определение координат и скорости транспортных средств 2*i (i=1, 2, ..., n) при их перемещении в населенном пункте с помощью установленных на них приемников 9 навигационного сигнала, полученного от созведия навигационных спутников 1*j(j=1, 2, ..., 24).
5) Для передачи полученной информации на центральную станцию 3 с помощью бортового компьютера 11 включается генератор 12 высокочастотного колебания
Uc1(t)=υc1*Cos(ωct+ϕc1), O≤t≤Tc1,
где υс1, ωс, ϕС1, Tс1 - амплитуда, несущая частота, начальная фаза и длительность высокочастотного колебания.
Сформированное колебание Uc1(t) с выхода генератора 12 поступает на первый вход фазового манипулятора 14, на второй вход которого подается модулирующий код M1(t) с выхода источника 13 дискретных сообщений. Модулирующий код M1(t) в цифровой форме содержит сведения о координатах и скорости транспортного средства. На выходе фазового манипулятора 14 образуется фазоманипулированный (ФМН) сигнал
U1(t)=υc1*Cos[ωct+ϕk1(t)+ϕc1], O≤t≤Tc1,
где ϕk1(t)={0,π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с модулирующим кодом M1(t).
Этот сигнал поступает на первый вход смесителя 16, на второй вход которого подается напряжение первого гетеродина 15
UГ1(t)=υГ1*Cos(ωГ1t+ϕГ1).
На выходе смесителя 16 образуются напряжения комбинационных частот. Усилителем 17 выделяется напряжение первой промежуточной (суммарной) частоты
Uпр1(t)=υпр1*Cos[ωпр1t+ϕk1(t)+ϕпр1], O≤t≤Tc,
где υпр1=1/2*K1*υс1*υГ1;
K1 - коэффициент передачи смесителя;
ωпр1=ωс+ωГ1=ωГ - первая промежуточная частота;
ϕпр1=ϕс1+ϕГ1,
которое усиливается в усилителе 18 мощности и через циркуляр 19 поступает в приемопередающую антенну 20 и излучается в эфир.
Напряжение Uпр1(t) улавливается приемопередающей антенной 30 на центральной станции 3, усиливается усилителем 32 мощности и поступает на первый вход смесителя 34, на второй вход которого подается напряжение гетеродина 33 UГ1(t). На выходе смесителя 34 образуются напряжения комбинационных частот. Усилителем 35 выделяется напряжение второй промежуточной (разностной) частоты
Uпр2(t)=υпр2*Cos[ωпр2t+ϕk1(t)+ϕпр2], O≤t≤Tc1,
где υпр2=1/2*K1*υпр1*υГ1;
ωпр2=ωпр1-ωГ1 - вторая промежуточная частота;
ϕпр2=ϕпр1-ϕГ1,
которое поступает на первый вход перемножителя 36, на второй вход которого подается напряжение гетеродина 33 UГ1(t). На выходе перемножителя 36 образуется напряжение
U2(t)=υ2*Cos[ωГ2t+ϕk1(t)+ϕГ2], O≤t≤Tc1,
где υ2=1/2*К*υпр2*υГ1;
К2 - коэффициент передачи перемножителя;
которое выделяется полосовым фильтром 37 и поступает на первый вход фазового детектора 38. На второй вход фазового детектора 38 в качестве опорного напряжения подается напряжение гетеродина 43
UГ2(t)=υГ2*Cos(ωГ2t+ϕГ2).
В результате синхронного детектирования на выходе фазового детектора 38 образуется низкочастотное напряжение
Uн1(t)=υн1*Cosϕk1(t),
где υн1=1/2*К3*υ2*υГ2;
К3 - коэффициент передачи фазового детектора;
пропорциональное модулирующему коду M1(t), которое поступает в компьютер 39 центральной станции 3, где происходит фиксация координат и скорости движения транспортного средства в данном населенном пункте. Такие данные поступают от всех транспортных средств, находящихся в данном населенном пункте.
6) На центральной станции 3 производится анализ полученных текущих навигационных информационных сообщений с выделением среди них тех скоростей движения транспортных средств, которые группируются в области полученной ранее среднестатистической оценки. При этом учитываются установленные на соответствующих дорогах скоростные ограничения. В памяти компьютера 39 центральной станции 3 производят уточнение данных о скоростях передвижения транспортных средств на дорогах и с учетом этого уточнения при необходимости корректируют электронную скоростную карту населенного пункта.
7) Периодическая передача 43 центральной станции 3 на приемные устройства пользователей ФМН-сигналов, несущих информацию о электронной скоростной карте населенного пункта и текущих поправках к ней в случае изменения ее параметров.
Для этого включается генератор 41, который формирует высокочастотное колебание
Uс2(t)=υc2*Cos(ωct+ϕc2], O≤t≤Tc2,
которое поступает на первый вход фазового манипулятора 42, на второй вход которого подается модулирующий код М2(t) с выхода источника 40 дискретных сообщений. Модулирующий код M2(t) в цифровой форме содержит сведения об электронной скоростной карте населенного пункта. На выходе фазового манипулятора 42 образуется ФМН-сигнал
U3(t)=υc2*Cos[ωct+ϕk2(t)+ϕc2], O≤t≤Tc2.
Этот сигнал поступает на первый вход смесителя 44, на второй вход которого подается напряжение UГ2(t) гетеродина 43. На выходе смесителя 44 образуются напряжения комбинационных частот. Усилителем 45 выделяется напряжение промежуточной (разностной) частоты
Uпр3 (t)=υпр3*Cos[ωпр2t-ϕk2(t)+ϕпр3], O≤t≤Tc2,
где υпр3=1/2*К1*υс2*υГ2;
ωпр=ωГ2-ωc=ω2 - промежуточная частота;
ϕпр3=ϕГ2-ϕс2,
которое усиливается в усилителе 46 мощности и через циркулятор 31 поступает в приемопередающую антенну 30 и излучается в эфир.
Напряжение Uпр3(t) улавливается приемопередающей антенной 20 на транспортном средстве 2.1, усиливается усилителем 21 мощности и поступает на первый вход смесителя 23, на второй вход которого подается напряжение UГ2(t) гетеродина 22. На выходе смесителя 23 образуются напряжения комбинационных частот. Усилителем 24 выделяется напряжение второй промежуточной (разностной) частоты
Uпр4(t)=υпр4*Cos[ωпр2t-ϕk2(t)+ϕпр4], O≤t≤Tc2,
где υпр4=1/2*К1*υпр3*υГ2;
ωпр2=ωг2-ω2 - вторая промежуточная частота;
ϕпр4=ϕГ2-ϕс3,
которое поступает на первый вход перемножителя 25, на второй вход которого подается напряжение UГ2(t) гетеродина 22. На выходе перемножителя 25 образуется напряжение
U4(t)=υ4*Cos[ωГ1t+ϕk2(t)+ϕГ1], O≤t≤Tc2,
где υ4=1/2*К2*υпр4*υГ2;
которое выделяется полосовым фильтром 26 и поступает на первый (информационный) вход фазового детектора 27. На второй вход фазового детектора 27 в качестве опорного
напряжения подается напряжение UГ(t) гетеродина 16. В результате синхронного детектирования на выходе фазового детектора 27 образуется низкочастотное напряжение
Uн2(t)=υн2*Cosϕk2(t),
где υн4=1/2*К3*υ4*υГ1;
пропорциональное модулирующему коду М2(t), которое поступает в компьютер 11 пользователя.
Пользователи при этом получают наиболее достоверную информацию о текущих значениях скоростного режима движения по населенному пункту.
8) Внесение пользователем 29 в его компьютер 11, имеющий СМО для определения оптимального маршрута движения, данных о пункте назначения 7, который с учетом полученных уточненных параметров электронной скоростной карты населенного пункта определяет наиболее оптимальный по времени движения до заданного пункта назначения 7 маршрут и индицирует на экране 28 дисплея пользователя 29 электронную скоростную карту, рекомендуемый маршрут и параметры текущего скоростного режима в населенном пункте.
9) Коррекция рекомендованного маршрута в случае изменения параметров электронной скоростной карты в процессе движения транспортного средства по выбранному маршруту.
Для реализации предлагаемого способа могут использоваться:
- модифицированные 14-канальные навигационные приборы серии СН, которые работают как по сигналам навигационных спутников российской навигационной системы ГЛОНАСС и/или американской системы GPS (Навстар), что обеспечивает более точное и устойчивое определение координат транспортного средства в сложных условиях современного города;
- средства радиосвязи могут быть выбраны исходя из имеющихся каналов и/или систем связи (автономные, транкинговые, сотовые, спутниковые);
- в качестве электронно-вычислительной техники может быть выбран любой IBM-совместимый компьютер исходя из требований оперативности обработки поступающей информации;
- в качестве средств водительского интерфейса может использоваться жидкокристаллический дисплей и сенсорный планшет для управления курсором.
Таким образом, предлагаемый способ по сравнению с прототипом и другими техническими решениями аналогичного назначения обеспечивает повышение эффективности обмена дискретной информацией по радиоканалам между центральной станцией и транспортными средствами. Это достигается использованием ретранслятора, двух частот ω1 и ω2, обеспечивающих соответствующую развязку, и сложных фазоманипулированных сигналов.
Указанные сигналы позволяют применять новый вид селекции - структурную селекцию. Интересной особенностью радиоканалов, использующих ФМН-сигналы, являются их адаптивные свойства. С уменьшением числа работающих радиостанций транспортных средств помехоустойчивость оставшихся возрастает.
С точки зрения обнаружения ФМН-сигналы обладают высокой энергетической и структурной скрытностью.
Энергетическая скрытность данных сигналов обусловлена их высокой сжимаемостью во времени или по спектру при оптимальной обработке, что позволяет снизить мгновенную излучаемую мощность. Вследствие этого ФМН-сигнал в точке приема может оказаться замаскированными шумами. Причем энергия ФМН-сигнала отнюдь не мала, она просто распределена по частотно-временной области так, что в каждой точке этой области мощность сигнала меньше мощности шумов и помех.
Структурная скрытность ФМН-сигналов обусловлена большим разнообразием их форм и значительными диапазонами изменения значений параметров, что затрудняет оптимальную или хотя бы квазиоптимальную обработку ФМН-сигналов априорно неизвестной структуры с целью повышения чувствительности приемника.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНОГО МАРШРУТА ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА В УСЛОВИЯХ НАСЕЛЕННОГО ПУНКТА | 2005 |
|
RU2297046C1 |
| СПОСОБ КОНТРОЛЯ ЗА ТРАНСПОРТИРОВКОЙ ГРУЗОВ | 2004 |
|
RU2269821C1 |
| ТЕРРИТОРИАЛЬНАЯ СИСТЕМА КОНТРОЛЯ ТРАНСПОРТИРОВКИ ЭКОЛОГИЧЕСКИ ОПАСНЫХ ГРУЗОВ | 2010 |
|
RU2429544C1 |
| УСТРОЙСТВО ЗАЩИТЫ ТРАНСПОРТНОГО СРЕДСТВА ОТ УГОНА И КРАЖ | 2004 |
|
RU2262457C1 |
| СИСТЕМА ОПОЗНАВАНИЯ АВТОТРАНСПОРТА | 2005 |
|
RU2297045C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДОВ | 2007 |
|
RU2360266C1 |
| СПОСОБ СОВМЕЩЕННОЙ РАДИОСВЯЗИ И РАДИОНАВИГАЦИИ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ, ДЛЯ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2004 |
|
RU2278047C1 |
| СИСТЕМА ДИСПЕТЧЕРСКОГО КОНТРОЛЯ И УПРАВЛЕНИЯ ИНКАССАТОРСКИМИ МАШИНАМИ | 2005 |
|
RU2303293C2 |
| СПОСОБ СОВМЕЩЕННОЙ РАДИОСВЯЗИ И РАДИОНАВИГАЦИИ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ, ДЛЯ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2004 |
|
RU2278048C1 |
| СПОСОБ СОВМЕЩЕННОЙ РАДИОСВЯЗИ И РАДИОНАВИГАЦИИ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ, ДЛЯ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2007 |
|
RU2348560C1 |
Изобретение относится к области управления движением транспортных средств (ТС), преимущественно инкассаторских машин, в условиях населенного пункта. На центральной станции формируют электронную карту населенного пункта и вводят в компьютер базу данных этой электронной карты. На основании предварительно полученных статистических данных о реально сложившихся скоростях движения ТС в населенном пункте устанавливают среднестатистический скоростной режим движения на каждой его дороге. Оценку этого режима осуществляют или по среднему значению скоростей, или по медиане. Путем совмещения сформированной электронной карты населенного пункта и полученных данных среднестатистического скоростного режима движения в нем создают электронную скоростную карту этого населенного пункта и вводят в память компьютера базу данных созданной электронной скоростной карты. Далее принимают навигационные информационные сообщения о координатах и скорости перемещения движущихся ТС в данном населенном пункте и фиксируют координаты и скорость движения этих ТС. На основе анализа полученных текущих навигационных информационных сообщений выделяют информационные сообщения о ТС, скорости которых группируются в области упомянутой среднестатистической оценки с учетом установленных на соответствующих дорогах скоростных ограничений. По выделенным информационным сообщениям уточняют данные о скоростях перемещения ТС на дорогах в памяти компьютера центральной станции и при необходимости корректируют электронную скоростную карту населенного пункта путем внесения уточненных значений скоростей на каждой дороге. Затем передают пользователям радиосигналы, несущие информацию об уточненных параметрах электронной скоростной карты населенного пункта. В компьютер пользователя вводят данные о пункте назначения и определяют рекомендуемые маршруты в качестве наиболее оптимальных по времени движения до заданного пункта назначения с учетом уточненных параметров электронной скоростной карты населенного пункта, принимаемой пользователем от центральной станции. При этом визуализируют на экране дисплея пользователя рекомендуемые маршруты по электронной скоростной карте населенного пункта, индицируют на ней информационные сообщения о значениях скоростей на дорогах населенного пункта и отображают текущее положение ТС. В процессе движения по выбранному маршруту в случае изменения параметров электронной скоростной карты населенного пункта производят коррекцию оптимальных маршрутов движения до пункта назначения. Дуплексную радиосвязь между центральной станцией и ТС осуществляют радиосигналами с фазовой манипуляцией на двух частотах непосредственно и/или через ретранслятор, установленный в центральной части населенного пункта. Изобретение повышает эффективность обмена дискретной информацией по радиоканалам между центральной станцией и ТС. 4 ил.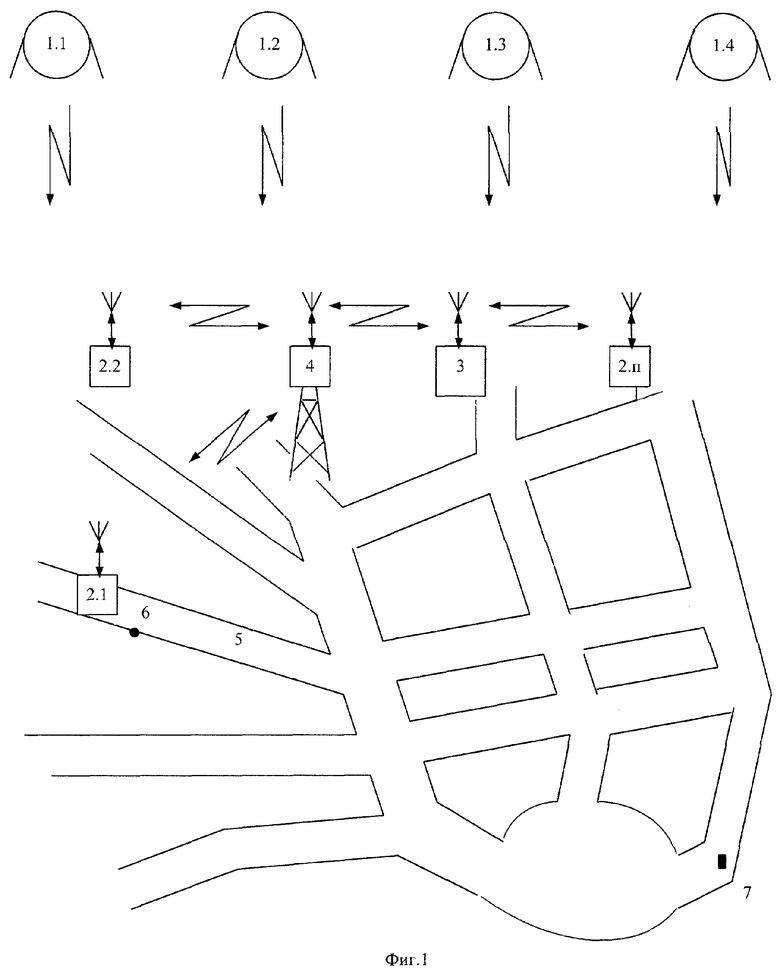
Способ определения маршрута движения транспортного средства в условиях населенного пункта, заключающийся в том, что на центральной станции формируют электронную карту населенного пункта и вводят в компьютер центральной станции базу данных этой электронной карты, на основании предварительно полученных статистических данных о реально сложившихся скоростях движения транспортных средств в населенном пункте устанавливают среднестатистический скоростной режим движения на каждой его дороге, оценку которого осуществляют или по среднему значению скоростей, или по медиане, путем совмещения сформированной электронной карты населенного пункта и полученных данных среднестатистического скоростного режима движения в нем создают электронную скоростную карту этого населенного пункта и вводят в память компьютера центральной станции базу данных созданной электронной скоростной карты, принимают навигационные информационные сообщения о координатах и скорости перемещения движущихся транспортных средств в данном населенном пункте и фиксируют координаты и скорость движения этих средств, на основе анализа полученных текущих навигационных информационных сообщений выделяют информационные сообщения о транспортных средствах, скорости которых группируются в области упомянутой среднестатистической оценки с учетом установленных на соответствующих дорогах скоростных ограничений, по выделенным информационным сообщениям уточняют данные о скоростях перемещения транспортных средств на дорогах в памяти компьютера центральной станции и при необходимости корректируют электронную скоростную карту населенного пункта путем внесения уточненных значений скоростей на каждой дороге, передают пользователям радиосигналы, несущие информацию об уточненных параметрах электронной скоростной карты населенного пункта, в компьютер пользователя вводят данные о пункте назначения и определяют рекомендуемые маршруты в качестве наиболее оптимальных по времени движения до заданного пункта назначения с учетом уточненных параметров электронной скоростной карты населенного пункта, принимаемой пользователем от центральной станции, визуализируют на экране дисплея пользователя рекомендуемые маршруты по электронной скоростной карте населенного пункта, индицируют на ней информационные сообщения о значениях скоростей на дорогах населенного пункта и отображают текущее положение транспортного средства, в процессе движения по выбранному маршруту в случае изменения параметров электронной скоростной карты населенного пункта производят коррекцию оптимальных маршрутов движения до пункта назначения, отличающийся тем, что дуплексную радиосвязь между центральной станцией и транспортным средством осуществляют радиосигналами с фазовой манипуляцией на двух частотах ω1 и ω2 непосредственно и/или через ретранслятор, установленный в центральной части населенного пункта, для чего на транспортном средстве формируют высокочастотное колебание на частоте ωc, манипулируют его по фазе на 180° в соответствии с модулирующим кодом M1(t), содержащим в цифровой форме сведения о координатах и скорости его движения, преобразуют по частоте с использованием частоты ωГ1 первого гетеродина, выделяют напряжение первой промежуточной частоты ωпр1, равной сумме частот ωпр1=ωc+ωг1=ω1, усиливают его по мощности, излучают в эфир на частоте ω1, принимают на центральной станции, усиливают по мощности, преобразуют по частоте с использованием частоты ωг1 первого гетеродина, выделяют напряжение второй промежуточной частоты ωпр 2, равной разности частот ωпр2=ωпр1-ωг1, перемножают его с напряжением второго гетеродина, выделяют фазоманипулированный сигнал на частоте ωг2 второго гетеродина, осуществляют синхронное его детектирование с использованием напряжения второго гетеродина, выделяют низкочастотное напряжение, пропорциональное модулирующему коду M1(t), и вводят его в компьютер пользователя, на центральной станции формируют высокочастотное колебание на частоте ωс, манипулируют его по фазе на 180° в соответствии с модулирующим кодом M2(t), содержащим в цифровой форме сведения об электронной скоростной карте населенного пункта, преобразуют по частоте с использованием частоты ωГ2 второго гетеродина, выделяют напряжение промежуточной частоты ωпр, равной разности частот ωпр=ωг2-ωс=ω2, усиливают его по мощности, излучают в эфир на частоте ω2, принимают на транспортном средстве, усиливают по мощности, преобразуют по частоте с использованием частоты ωг2, второго гетеродина, выделяют напряжение второй промежуточной частоты ωпр2, равной разности частот ωпр2=ωг2-ω2, перемножают его с напряжением второго гетеродина, выделяют фазоманипулированный сигнал на частоте ωГ1 первого гетеродина, осуществляют синхронное его детектирование с использованием напряжения первого гетеродина, выделяют низкочастотное напряжение, пропорциональное модулирующему коду M2(t), и вводят его в компьютер центральной станции, причем частоты выбирают следующим образом:
ωг2-ωг1=ωпр2=ωс, ωг1=ω2=ωпр, ωг2=ω1=ωпр1.
| СПОСОБ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНОГО МАРШРУТА ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА В УСЛОВИЯХ НАСЕЛЕННОГО ПУНКТА | 1999 |
|
RU2153194C1 |
| УСТРОЙСТВО ВЫБОРА ОПТИМАЛЬНОГО МАРШРУТА МАНЕВРА | 1992 |
|
RU2045773C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ АВТОМОБИЛЕЙ | 1990 |
|
RU2022367C1 |
| ТЕРРИТОРИАЛЬНАЯ СИСТЕМА КОНТРОЛЯ ТРАНСПОРТИРОВКИ ЭКОЛОГИЧЕСКИ ОПАСНЫХ ГРУЗОВ | 1999 |
|
RU2173889C2 |

