Изобретение относится к области гироскопического приборостроения, системам навигации и стабилизации.
Известен способ гироскопической коррекции, в котором используется сигнал, пропорциональный кажущемуся угловому ускорению горизонтальной рамки гироскопа, сигнал продольной скорости, сигнал с выхода курсового гироскопа. Результирующий сигнал компенсации сравнивается с сигналом кажущегося ускорения. Сигнал, соответствующий разности указанных сигналов, управляет двигателем гироскопической коррекции, Франция, патент 2166573, публикация 1973 г., 21 сентября, кл. МКИ, G01С 19/00 /1/.
Данный способ может быть реализован с помощью гироскопического прибора, содержащего установленный на кардановом подвесе ротор, являющийся передатчиком сигналов, с выхода которого напряжение подается на конденсаторы, напряжения с выходов конденсаторов усиливаются усилителями и сравниваются в блоке сравнения, который выдает сигнал Vo. При колебательном перемещении ротора модуляция сигналов конденсаторов приводит к появлению сигнала Vo, зависящего от колебательного перемещения, Франция, заявка 2354537, публикация 1978 г., 10 февраля, кл. МКИ G01С 19/02 /2/.
Однако данные способ и устройство имеют невысокую точность установки нулевой линии прицеливания из-за существенной зависимости измеряемых угловых рассогласований от амплитуды входного сигнала, наложенных шумов.
Наиболее близким к предлагаемому изобретению является способ измерения угла пеленга, используемый в гироскопическом приборе, в котором вырабатывают электрический широтно-импульсно-модулированный (ШИМ) сигнал, длительность импульса которого, отнесенная к периоду следования, линейно связана с измеряемым углом пеленга, ШИМ сигнал сравнивают с опорным сигналом, определяют моменты времени t1 и t2, в которые уровень ШИМ сигнала соответственно на его переднем и на заднем фронтах равен уровню опорного сигнала, определяют длительность, период импульса ШИМ сигнала, вычисляют угол пеленга, Российская Федерация, патент 2141623, зарегистрирован 10 августа 1998 г., кл. МКИ G01С 19/12 /3/.
Устройство для измерения угла пеленга /3/, в котором реализован данный способ измерения угла пеленга, включает гироскопический прибор, содержащий корпус, ротор на кардановом подвесе, фотооптический датчик угла, установленный на корпусе и взаимодействующий с зеркалом, размещенным на роторе соосно с осью его собственного вращения, на сферической поверхности которого выполнена контрастная маска.
В данных способе и устройстве для его осуществления конечная длительность фронтов импульса ШИМ сигнала, определяемая конечностью геометрических размеров элементов фотооптического датчика угла, и искажения фронтов в виде наложения шума, вызванного, например, нестабильностью коэффициента отражения по поверхности контрастной маски, приводят к значительной погрешности измерения угла пеленга из-за его повышенной чувствительности к нестабильности указанных параметров ШИМ сигнала и уровня опорного сигнала.
Задачей предлагаемого изобретения является повышение точности измерения угла пеленга за счет уменьшения влияния шумов входного сигнала, уменьшения влияния технологического и временного разброса амплитуды и формы входного сигнала, а также нестабильности уровня опорного сигнала.
Поставленная задача достигается тем, что в предлагаемом изобретении в способе измерения угла пеленга, в котором вырабатывают электрический широтно-импульсно-модулированный (ШИМ) сигнал, длительность импульса которого, отнесенная к периоду следования, линейно связана с измеряемым углом пеленга, сравнивают ШИМ сигнал с опорным сигналом, определяют моменты времени t1 и t2, в которые уровень ШИМ сигнала соответственно на его переднем и на заднем фронтах равен уровню опорного сигнала, определяют длительность, период импульса ШИМ сигнала, вычисляют угол пеленга, дополнительно определяют амплитуду импульсов ШИМ сигнала, а уровень опорного сигнала формируют равным половине амплитуды ШИМ сигнала, непосредственно после каждого из моментов t1 и t2 запрещают сравнение входного ШИМ сигнала с опорным сигналом до момента достижения уровнем входного ШИМ сигнала значения, по переднему фронту ШИМ сигнала большего, а по заднему фронту меньшего, чем уровень опорного сигнала на величину, превышающую амплитудное значение ожидаемого шума;
в устройство для измерения угла пеленга, включающее гироскопический прибор, содержащий фотооптический датчик угла, дополнительно введены последовательно соединенные блок сравнения и вычислитель, первый и второй конденсаторы, первый и второй диоды, входы которых подключены к первому выходу фотооптического датчика угла, пять резисторов, причем выход первого диода соединен с первыми контактами второго конденсатора и четвертого резистора, второй контакт которого соединен с инвертирующим входом блока сравнения и первым контактом пятого резистора, выход второго диода соединен с неинвертирующим входом блока сравнения, первым контактом первого резистора, первым контактом первого конденсатора, второй контакт которого соединен с первыми контактами второго и третьего резисторов, а второй контакт третьего резистора соединен с выходом блока сравнения; при этом второй выход фотооптического датчика угла, вторые контакты первого, второго и пятого резисторов, второго конденсатора подсоединены к общему проводу.
Положительный эффект обеспечивается за счет того, что в способе измерения угла пеленга и устройстве для его осуществления при определении длительности, периода импульсов ШИМ сигнала учитывают его изменения и уменьшают ошибки, вносимые наложенными шумами, для чего в способе дополнительно определяют амплитуду импульсов ШИМ сигнала, а уровень опорного сигнала формируют равным половине амплитуды ШИМ сигнала, обеспечивая сравнение ШИМ сигнала с опорным на середине фронтов импульсов, где параметры сигнала наиболее стабильны, непосредственно после каждого из моментов t1 и t2 запрещают сравнение входного ШИМ сигнала с опорным сигналом до момента достижения уровнем входного ШИМ сигнала значения, по переднему фронту ШИМ сигнала большего, а по заднему фронту меньшего, чем уровень опорного сигнала, на величину, превышающую амплитудное значение ожидаемого шума, чем исключают влияние на результат сравнения шумов на фронтах импульсов.
Данное техническое решение поясняется графическими материалами.
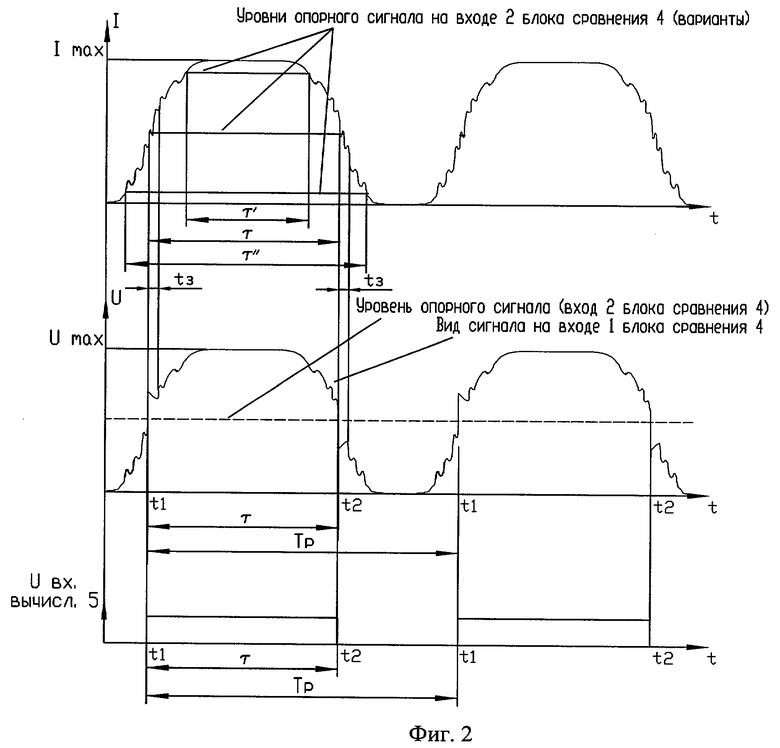
На фиг.1 изображена блок-схема устройства для измерения угла пеленга, с помощью которого реализуют предлагаемый способ. Устройство состоит из гироскопического прибора с фотооптическим датчиком угла 1, данный прибор может быть выполнен, например, аналогично прототипу /3/, при этом выход фотооптического датчика угла является первым выходом гироскопического прибора 1, первого диода 2 и второго диода 3, входы которых подключены к первому выходу гироскопического прибора 1, последовательно соединенных блока сравнения 4 и вычислителя 5, первого конденсатора 7 и второго конденсатора 9, первого резистора 6, второго резистора 10, третьего резистора 11, четвертого резистора 8, пятого резистора 12, первого конденсатора 7, второго конденсатора 9, причем выход первого диода 2 соединен с первыми контактами второго конденсатора 9 и четвертого резистора 8, второй контакт которого соединен с инвертирующим входом блока сравнения 4 и первым контактом пятого резистора 12, выход второго диода 3 соединен с неинвертирующим входом блока сравнения 4, первым контактом первого резистора 6, первым контактом первого конденсатора 7, второй контакт которого соединен с первыми контактами второго резистора 10 и третьего резистора 11, а второй контакт третьего резистора 11 соединен с выходом блока сравнения 4; при этом второй выход гироскопического прибора 1, вторые контакты первого резистора 6, второго резистора 10 и пятого резистора 12, второго конденсатора 9 подсоединены к общему проводу.
На фиг.2 приведены характер ШИМ сигнала, снимаемого с выхода фотооптического датчика угла гироскопического прибора 1, в виде зависимости тока фотооптического датчика угла I от времени t, вид сигналов на 1 и 2 входах блока сравнения 4, вид сигналов на входе вычислителя 5.
В фотооптическом датчике угла гироскопического прибора /3/ используется контрастная маска переменой ширины на зеркальной сферической поверхности быстро вращающегося ротора. При отклонении корпуса относительно ротора на выходе фотооптического датчика пропорционально приращению измеряемого угла пеленга изменяется длительность τ импульса фототока и ее приращение.
Таким образом происходит ШИМ модуляция сигнала и формируется ШИМ сигнал, снимаемый с выхода фотооптического датчика угла, в длительности импульса τ которого, отнесенной к периоду следования Тр (вращения ротора гироскопа), содержится информация об измеряемом гироскопическим устройством угле пеленга.
Фронты реально действующих ШИМ сигналов в отличие от идеальных на различных временных участках имеют конечную и переменную скорость нарастания и спада. Поэтому длительность ШИМ сигнала, измеренная по различным уровням (τ, τ', τ", фиг.2), будет различна. Максимальная чувствительность ошибки измеряемого параметра к уровню, на котором происходит измерение, оказывается вблизи к максимуму и минимуму значения ШИМ сигнала, где скорость изменения ШИМ сигнала минимальна, а минимальная чувствительность - в районе его среднего значения, где скорость изменения ШИМ сигнала максимальна. Это свойство использовано в предлагаемом изобретении.
Для минимизации ошибки измерения опорный сигнал на входе 2 блока сравнения 4 устанавливают номиналами резисторов 8 и 12 на уровне половины амплитудного значения ШИМ сигнала, величину которого определяют, детектируя его первым диодом 2 и вторым конденсатором 9. ШИМ сигнал выделяют на первом резисторе 6. Второй диод 3, через который поступает выходной ток фотооптического датчика угла на первый резистор 6, предназначен для компенсации ошибки, вносимой первым диодом 2 в измерение амплитуды ШИМ сигнала.
Выделенный на первом резисторе 6 ШИМ сигнал подают на вход 1 блока сравнения 4. В моменты времени t1 и t2, в которые уровень ШИМ сигнала соответственно на переднем и на заднем фронтах равен уровню опорного сигнала, блок сравнения 4 скачкообразно меняет свое выходное состояние на противоположное. Т.о. на выходе блока сравнения 4 (входе вычислителя 5) формируется сигнал прямоугольной формы.
Вычислитель 5 рассчитывает значения длительности импульса ШИМ сигнала τ как интервал между передним и задним фронтами импульса, действующего на его входе, и периода одного оборота ротора гироскопического прибора 1 Тр как интервал между текущим и предыдущим передними фронтами импульса, а затем угол пеленга как приращение величины k·τ/Тр, вызванной действующим углом пеленга, здесь k - коэффициент пропорциональности, определяемый конструктивными параметрами фотооптического датчика угла гироскопического прибора 1, аналогично прототипу /3/.
Избавиться от ошибок, вносимых шумами входного сигнала, позволяет запрет сравнения входного ШИМ сигнала с опорным сигналом непосредственно после каждого из моментов t1 и t2 до момента t3 достижения уровнем входного ШИМ сигнала значения, по переднему фронту ШИМ сигнала большего, а по заднему фронту меньшего, чем уровень опорного сигнала на величину, превышающую амплитудное значение ожидаемого шума, чем исключается влияние на результат сравнения шумов на фронтах импульсов.
Для этого в каждый из моментов t1 и t2 посредством положительной обратной связи на элементах 7, 10, 11 реализуют скачкообразное смещение уровня сигнала на входе 1 блока сравнения 4 в направлении его изменения на время действия шума: до момента t3. Делителем, который образуют второй резистор 10 и третий резистор 11, устанавливают величину скачкообразного смещения, превышающую амплитудное значение ожидаемого шума.
Дифференцирующие свойства первого конденсатора 7 в цепи обратной связи обеспечивают действие запрета сравнения ШИМ сигнала с опорным сигналом до t3, момента достижения приращения ШИМ сигнала величины, превышающей амплитуду шума.
Диоды 2 и 3 для снижения влияния разброса их характеристик на результат измерения конструктивно выполнены на одном кристалле, например, 2Д706АС9 аА0.339.582 ТУ. Резисторы могут быть использованы, например, первый резистор - 15 кОм, второй резистор - 1 кОм, третий резистор - 24 кОм, четвертый резистор - 200 кОм, пятый резистор - 200 кОм типа С2-33 ОЖО 467.093 ТУ, конденсаторы, например, первый конденсатор - 200 пФ, второй конденсатор - 1,5 мкФ типа К10-17а ОЖО.464.107 ТУ. В качестве блока сравнения 4 может быть использована, например, микросхема 140УД6 АЕ-ЯР.431130.149-01 ТУ. Вычислитель 5 может быть выполнен, например, как блок электронной аппаратуры, аналогично указанной в прототипе /3/.
Таким образом, предложенные способ измерения угла пеленга и устройство для его осуществления позволяют существенно минимизировать ошибки измерения системы и повышают вероятность правильного функционирования устройства в автономном режиме.
Заявляемые способ измерения угла пеленга и устройство для его осуществления проверены с большой эффективностью в комплексе "Гермес".
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ УГЛА ПЕЛЕНГА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2314494C1 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА И ГИРОСКОПИЧЕСКИЙ ПРИБОР | 2001 |
|
RU2210727C2 |
| УСТРОЙСТВО ДЛЯ ПОИСКА ПОДЗЕМНЫХ ТРУБОПРОВОДОВ | 2002 |
|
RU2202812C1 |
| ГИРОСКОПИЧЕСКИЙ ПРИБОР | 1998 |
|
RU2141623C1 |
| Драйвер для светодиодного светильника | 2020 |
|
RU2742050C1 |
| ОСВЕТИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ ЭНДОСКОПИЧЕСКОЙ ТЕХНИКИ | 1994 |
|
RU2082309C1 |
| Ключевой стабилизатор постоянного напряжения | 1990 |
|
SU1712947A1 |
| ОСВЕТИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ ЭНДОСКОПИЧЕСКОЙ ТЕХНИКИ | 2000 |
|
RU2161901C1 |
| ЭЛЕКТРОННАЯ СИСТЕМА | 1996 |
|
RU2103796C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УВЕЛИЧЕНИЯ ДИАПАЗОНА РЕГУЛИРОВАНИЯ ОСВЕЩЕННОСТИ ТВЕРДОТЕЛЬНЫХ ОСВЕТИТЕЛЬНЫХ ПРИБОРОВ | 2011 |
|
RU2556019C2 |
Изобретение относится к области гироскопического приборостроения, системам навигации и стабилизации. В способе измерения угла пеленга и устройстве для его осуществления при определении длительности импульсов широтно-импульсно-модулированного (ШИМ) сигнала учитывают его изменения и уменьшают ошибки, вносимые наложенными шумами, для чего дополнительно определяют амплитуду импульсов ШИМ сигнала, а уровень опорного сигнала формируют равным половине амплитуды ШИМ сигнала, обеспечивая сравнение ШИМ сигнала с опорным на середине фронтов импульсов, где параметры сигнала наиболее стабильны. Непосредственно после каждого из моментов t1 и t2 запрещают сравнение входного ШИМ сигнала с опорным сигналом до момента достижения уровнем входного ШИМ сигнала значения, по переднему фронту ШИМ сигнала большего, а по заднему фронту меньшего, чем уровень опорного сигнала, на величину, превышающую амплитудное значение ожидаемого шума, чем исключают влияние на результат сравнения шумов на фронтах импульсов. Техническим результатом является повышение точности измерения угла пеленга. 2 с.п. ф-лы, 2 ил.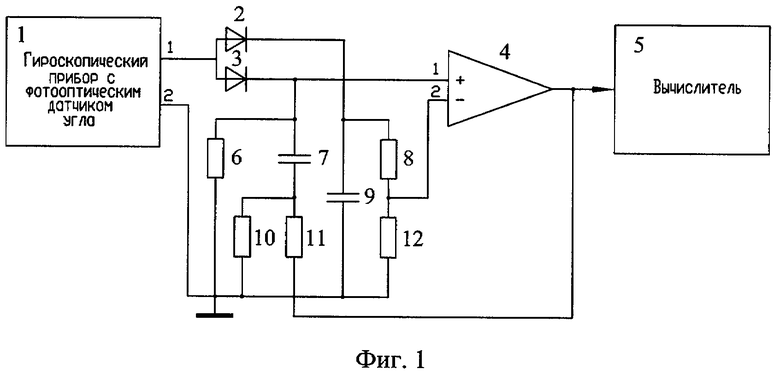
| ГИРОСКОПИЧЕСКИЙ ПРИБОР | 1998 |
|
RU2141623C1 |
| ГИРОСКОПИЧЕСКИЙ ПРИБОР И СПОСОБ РЕГУЛИРОВКИ ЕГО ДРЕЙФА | 1996 |
|
RU2114394C1 |
| ГИРОСКОПИЧЕСКИЙ ПРИБОР | 1996 |
|
RU2123170C1 |
| БЕСКОНЕЧНАЯ ФОРМАТНАЯ ЛЕНТА И СПОСОБ ЕЕ ИЗГОТОВЛЕНИЯ | 2000 |
|
RU2166572C1 |
| СПОСОБ РАЗМЕТКИ ОТВЕРСТИЙ НА ЦИЛИНДРИЧЕСКОЙ ПОВЕРХНОСТИ | 2007 |
|
RU2354537C2 |
| US 4899955 А, 13.02.1990 | |||
| GB 1486537 А, 21.09.1977. | |||

