Изобретение относится к области специализированных устройств вычислительной техники и может быть использовано для моделирования процесса перемещения подвижного объекта.
Известно устройство, содержащее генератор равномерно распределенных случайных чисел, элементы задержки, делители, блоки вычисления логарифма, цифроаналоговый преобразователь, схему сравнения, генератор линейно изменяющегося напряжения, вычитатель из единицы, ограничитель длительности импульса, формирователь импульсов, вычитатели, умножитель, сумматор [1].
Недостатком устройства является относительно узкие функциональные возможности.
Наиболее близким к заявляемому устройству является устройство, содержащее последовательно соединенный датчик случайных чисел, аналогово-цифровой преобразователь, блок сравнения, прерыватель, генератор тактовых импульсов, выход которого соединен с входом датчика случайных чисел и с входом генератора экспоненциального напряжения, выход которого соединен со вторым входом блока сравнения, последовательно соединенный элемент задержки, генератор линейного напряжения, аналого-цифровой преобразователь, первый и второй регистр сдвига, сумматор, группа блоков выделения минимума, блок выделения максимума и регистр, вход синхронизации которого соединен с входом синхронизации второго регистра сдвига, с входом элемента задержки, с управляющим входом первого регистра сдвига и с выходом генератора тактовых импульсов [2].
Недостатком наиболее близкого технического решения являются относительно узкие функциональные возможности, в частности оно позволяет формировать моменты смены состояния объекта, но не позволяет моделировать процесс изменения координат мест стоянки подвижного объекта, в зависимости от его скорости, расстояние между точками стоянки, а также интенсивности стоянки подвижного объекта в зависимости от времени суток.
Требуемый технический результат - расширение функциональных возможностей путем обеспечения моделирования процесса перемещения подвижного объекта в районе дислокации в зависимости от времени суток, скорости движения и расстояния между точками стоянок.
Требуемый технический результат достигается тем, что в устройство, содержащее генератор тактовых импульсов, выход которого соединен с входом первого датчика случайных чисел, первый регистр, второй регистр и сумматор, введены второй датчик случайных чисел, третий датчик случайных чисел, управляющие входы которых соединены с выходом генератора тактовых импульсов, третий и четвертый регистры, последовательный сумматор, блок расчета времени стоянки подвижного объекта и блок расчета времени движения подвижного объекта, а также блок расчета интенсивности стоянки подвижного объекта, при этом, выход первого датчика случайных чисел соединен с информационным входом первого регистра, выходы которого соединены с входом блока расчета времени движения подвижного объекта, а управляющий вход первого регистра соединен с выходом генератора тактовых импульсов, выход второго датчика случайных чисел соединен с информационным входом второго регистра, управляющий вход которого соединен с выходом генератора тактовых импульсов, выходы второго регистра соединены с информационным входом блока расчета времени движения подвижного объекта, выход третьего датчика случайных чисел соединен с входом блока расчета времени стоянки подвижного объекта, выход которого соединен с информационным входом четвертого регистра, управляющий вход которого соединен с выходом генератора тактовых импульсов, а выход четвертого регистра соединен с входом сумматора, выход блока расчета времени движения подвижного объекта соединен с информационным входом третьего регистра, управляющий вход которого соединен с управляющим выходом генератора тактовых импульсов, выход третьего регистра соединен с входом сумматора, выход которого соединен с входом последовательного сумматора, выход которого соединен с входом блока расчета интенсивности стоянки подвижного объекта, выход которого соединен с входом блока расчета времени стоянки подвижного объекта.
Анализ научно-технической литературы показал, что до подачи заявки отсутствовали устройства с указанной совокупностью признаков.
Следовательно, изобретение отвечает требованию новизны.
Кроме того, требуемый технический результат достигается всей вновь введенной совокупностью существенных признаков, которая в известной научно-технической литературе не обнаружена.
Следовательно, изобретение отвечает требованию изобретательского уровня.
При этом, как будет показано ниже, входящие в состав устройства элементы и блоки широко используются в электронной и импульсной технике, что позволяет сделать вывод о соответствии изобретения требованию промышленной применимости.
На чертеже представлена электрическая структурная схема устройства для моделирования процесса перемещения подвижного объекта.
Устройство для моделирования процесса перемещения подвижного объекта содержит генератор 1 тактовых импульсов, первый датчик 2 случайных чисел, второй датчик 3 случайных чисел, третий датчик 4 случайных чисел, первый регистр 5, второй регистр 6, третий регистр 7, четвертый регистр 8, блок 9 расчета времени движения подвижного объекта, блок 10 расчета времени стоянки подвижного объекта, сумматор 11, последовательный сумматор 12, блок 13 расчета интенсивности стоянки подвижного объекта.
При этом входом устройства для моделирования процесса перемещения подвижного объекта являются информационные входы блока 9 расчета времени движения подвижного объекта, причем выход генератора 1 тактовых импульсов соединен с входами первого датчика 2 случайных чисел и второго датчика 3 случайных чисел и третьего датчика 4 случайных чисел, выход первого датчика 2 случайных чисел соединен с информационным входом первого регистра 5, а управляющий вход первого регистра 5 соединен с выходом генератора 1 тактовых импульсов, выходы первого регистра 5 соединены с информационным входом блока 9 расчета времени движения подвижного объекта, выход второго датчика 3 случайных чисел соединен с информационным входом второго регистра 6, а управляющий вход второго регистра 6 соединен с выходом генератора 1 тактовых импульсов, выходы второго регистра 6 соединены с информационным входом блока 9 расчета времени движения подвижного объекта, выход третьего датчика 4 случайных чисел соединен с входом блока 10 расчета времени стоянки подвижного объекта, выход которого соединен с информационным входом четвертого регистра 8, управляющий вход которого соединен с управляющим выходом генератора 1 тактовых импульсов, выход четвертого регистра 8 соединен с входом сумматора 11, выход блока 9 расчета времени движения подвижного объекта, соединен с информационным входом третьего регистра 7, управляющий вход которого соединен с управляющим выходом генератора 1 тактовых импульсов, выход третьего регистра 7 соединен с входом сумматора 11, выход которого соединен с входом последовательного сумматора 12, выход которого соединен с входом блока 13 расчета интенсивности стоянки подвижного объекта, выход которого соединен с входом блока 10 расчета времени стоянки подвижного объекта.
Работает устройство для моделирования процесса перемещения подвижного объекта следующим образом.
При моделировании функционирования подвижного объекта предполагается, что для повышения скрытности за счет создания неопределенности своего местоположения, подвижный объект периодически перемещается в пределах района его дислокации. То есть, в процессе функционирования подвижный объект может находиться в одном из состояний: Z0 - на стоянке в некоторой точке района его дислокации; Z1 - в движении.
Чтобы минимизировать информацию, которая может использоваться, например, для поражения подвижного объекта, его переход из одного состояния в другое должен осуществляться в любой точке района его дислокации.
Для затруднения прогнозирования состояния подвижного объекта во времени, необходимо организовать процесс смены позиций таким образом, чтобы переход из одного состояния в другое осуществлялся в случайные моменты времени.
При этом время пребывания подвижного объекта на стоянке в некоторой точке района его дислокации целесообразно распределять согласно показательному закону подвижного объекта. Вид данного закона зависит от сложившейся обстановки, например от времени суток, таким образом, смена состояния во времени описывается параметром: λ0(t) - параметр показательного закона распределения случайного времени пребывания подвижного объекта в состоянии Z0.
С учетом вышеописанного получаем, что время стоянки подвижного объекта в Qi-й точке стоянки рассчитывается по формуле (1).

где η - случайное равномерно распределенное число на интервале (0,1).
Теперь рассчитаем время движения с Qi-й на Qi+1 точку стоянки подвижного объекта, формула (2)

где α (alfa) - коэффициент увеличения дороги за счет нелинейности сети дорог в районе дислокации, α>1;
L(Qi,Qi+1) - кратчайшее географическое расстояние между Qi-й и Qi+1 точкой стоянки подвижного объекта;
Vcp - средняя скорость движения подвижного объекта по дорогам в районе дислокации;
В формуле (2) не известно L(Qi,Qi+1) - кратчайшее географическое расстояние между Qi-й и Qi+1 точкой стоянки подвижного объекта, которое в свою очередь рассчитывается по формуле (3).

где Bi, Li - широта и долгота Qi-й точки стоянки подвижного объекта соответственно;
Bi+1, Li+1 - широта и долгота Qi+1 точки стоянки подвижного объекта соответственно;
RЗ - радиус Земли.
Указанный порядок моделирования реализуется следующим образом.
При запуске устройства от внешнего источника, не показанного на чертеже, генератор 1 тактовых импульсов выдает импульс и в первом датчике 2 случайных чисел, втором датчике 3 случайных чисел и третьем датчике 4 случайных чисел генерируются три равномерно распределенных числа. Число, сгенерированное в третьем датчике 4 случайных чисел, передается на вход блока 10 расчета времени стоянки подвижного объекта, в котором по формуле (1) рассчитывается время стоянки подвижного объекта в начальной точке стоянки и передается на вход четвертого регистра 8, где в него и записывается. Параллельно находящиеся в первом датчике 2 случайных чисел и во втором датчике 3 случайных чисел числа подаются на вход первого регистра 5 и второго регистра 6 соответственно, где они и записываются, на вторую позицию, а число, находившееся на второй позиции, записывается на первую позицию в данном регистре соответственно. На первой позиции в начальном состоянии в первом регистре 5 и втором регистре 6 находится число 0. Выходы первого регистра 5 и второго регистра 6 соединены с входом блоком 9 расчета времени движения подвижного объекта, в котором по формуле (2) с учетом формулы (3) рассчитывается время движения подвижного объекта при перемещении с одного Qi-го места стоянки на Qi+1-e, выход блока 9 расчета времени движения подвижного объекта соединен с входом третьего регистра 7. В нем происходит запись значения рассчитанного времени. На вход сумматора 11 подаются значения времени стоянки подвижного объекта, находящегося в четвертом регистре 8, и времени движения подвижного объекта с Qi-го места стоянки на Qi+1-e, находящегося в третьем регистре 7. Число, находящееся в сумматоре 11, передается в последовательный сумматор 12. Затем из последовательного сумматора 12 на вход блока 13 расчета интенсивности стоянки подвижного объекта, где рассчитывается интенсивность стоянки подвижного объекта на данный момент времени, а затем значение величины интенсивности передается на вход блока 10 расчета времени стоянки подвижного объекта. Останов данного устройства происходит от внешнего устройства и моделирование перемещением подвижного объекта прекращается. В конце работы данного устройства в первом регистре 5 и втором регистре 6 находятся координаты всех мест стоянок подвижного объекта в районе дислокации, а четвертом регистре 8 и третьем регистре 7 находятся времена стоянки на Qi-х местах стоянки и все времена движений с Qi-го на Qi+1-e место стоянки подвижного объекта в районе дислокации.
Таким образом, благодаря введению новых блоков и связей достигается требуемый технический результат - расширение функциональных возможностей путем обеспечения моделирования процесса перемещения подвижного объекта в районе дислокации в зависимости от времени суток, скорости движения и расстояния между точками стоянок.
Источники информации принятые во внимание:
1. SU, 1751753, А1, кл. G06F 7/58, 1990.
2. SU, 1829109, А1, кл. Н03К 3/84, 1991.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ КАТАЛОГА РАЗВЕДКИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2007 |
|
RU2353970C1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ КАТАЛОГА РАЗВЕДКИ РАЗНОТИПНЫХ ПОДВИЖНЫХ ОБЪЕКТОВ | 2013 |
|
RU2544761C1 |
| Устройство для моделирования комбинаций разнотипных подвижных объектов | 2017 |
|
RU2643623C1 |
| Устройство для моделирования состояний отдельного объекта в условиях неопределенности | 2019 |
|
RU2728501C1 |
| Устройство для моделирования группового управления составным подвижным объектом в условиях неопределенности | 2025 |
|
RU2841258C1 |
| Устройство для моделирования каталога разведки подвижных объектов | 2019 |
|
RU2710300C1 |
| Устройство для моделирования состояния группового объекта в условиях неопределенности | 2023 |
|
RU2832491C1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ПРОЦЕССА ПЕРЕМЕЩЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2008 |
|
RU2385493C1 |
| Генератор случайных чисел | 1989 |
|
SU1688240A1 |
| Устройство для моделирования процесса перемещения подвижного объекта в условиях функционирования космической разведки с учетом возможных неисправностей | 2019 |
|
RU2726834C1 |
Изобретение относится к области специализированных устройств вычислительной техники и может быть использовано для моделирования процесса перемещения подвижного объекта. Техническим результатом является расширение функциональных возможностей устройства. Устройство содержит генератор тактовых импульсов, три датчика случайных чисел, четыре регистра, блок расчета времени движения подвижного объекта, блок расчета времени стоянки подвижного объекта, сумматор, последовательный сумматор, блок расчета интенсивности стоянки подвижного объекта. 1 ил.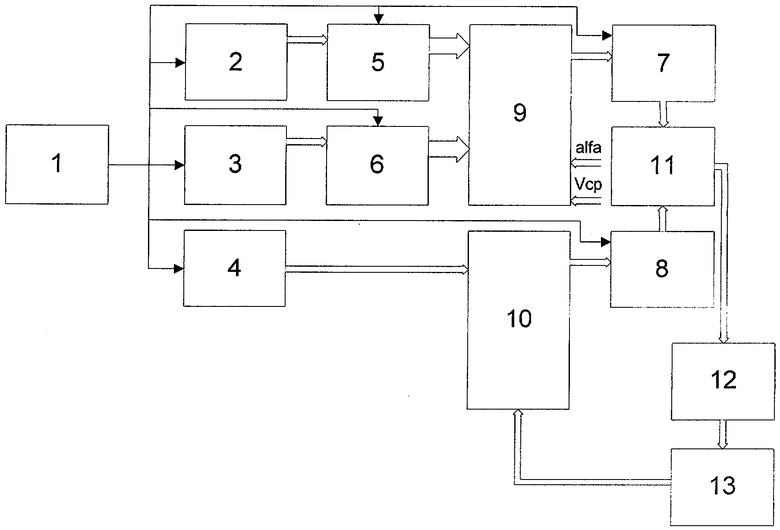
Устройство для моделирования процесса перемещения подвижного объекта, содержащее генератор тактовых импульсов, выход которого соединен с входом первого датчика случайных чисел, первый регистр, второй регистр и сумматор, отличающееся тем, что введены второй датчик случайных чисел, третий датчик случайных чисел, управляющие входы которых соединены с выходом генератора тактовых импульсов, третий и четвертый регистры, последовательный сумматор, блок расчета времени стоянки подвижного объекта и блок расчета времени движения подвижного объекта, а также блок расчета интенсивности стоянки подвижного объекта, при этом выход первого датчика случайных чисел соединен с информационным входом первого регистра, выход которого соединен с входом блока расчета времени движения подвижного объекта, а управляющий вход первого регистра соединен с выходом генератора тактовых импульсов, выход второго датчика случайных чисел соединен с информационным входом второго регистра, а управляющий вход которого соединен с выходом генератора тактовых импульсов, выходы второго регистра соединены с информационным входом блока расчета времени движения подвижного объекта, выход третьего датчика случайных чисел соединен с входом блока расчета времени стоянки подвижного объекта, выход которого соединен с информационным входом четвертого регистра, управляющий вход которого соединен с выходом генератора тактовых импульсов, а выход четвертого регистра соединен с входом сумматора, выход блока расчета времени движения подвижного объекта соединен с информационным входом третьего регистра, управляющий вход которого соединен с выходом генератора тактовых импульсов, выход третьего регистра соединен с входом сумматора, выход которого соединен с входом последовательного сумматора, выход которого соединен с входом блока расчета интенсивности стоянки подвижного объекта, выход которого соединен с входом блока расчета времени стоянки подвижного объекта.
| Генератор пуассоновского потока импульсов | 1991 |
|
SU1829109A1 |
| ГЕНЕРАТОР СЛУЧАЙНОГО ПРОЦЕССА | 1991 |
|
RU2050585C1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ СИСТЕМЫ РАДИОСВЯЗИ | 1998 |
|
RU2156032C2 |
| Устройство для определения характеристик случайных процессов | 1980 |
|
SU900298A1 |
| US 2004059548 A1, 25.03.2004 | |||
| DE 19803826 A1, 05.08.1999. | |||

