Изобретение относится к области транспорта, а именно к диагностике технического состояния тормозных систем транспортных средств.
Известен способ контроля тормозных сил колес, заключающийся в испытании тормозных систем путем установки транспортных средств на силоизмерительные ролики и прокручивания с их помощью заторможенных колес. Этот способ в настоящее время имеет наибольшее распространение и используется в качестве основного в ГОСТ Р 51709-2001 «Автотранспортные средства. Требования безопасности к техническому состоянию и методы проверки».
Несмотря на то, что данный способ реализуется с помощью оборудования, имеющего высокий технический уровень, он обладает рядом существенных недостатков, а именно:
1) высокая стоимость роликовых тормозных стендов;
2) необходимость подвода к ним электроэнергии;
3) потребность в относительно больших производственных площадях;
4) существование трудновыполнимого на практике требования обеспечения чистоты и сухого состояния колес транспортных средств при испытаниях;
5) ограниченное использование данного способа из-за недоступности диагностического оборудования для небольших технических сервисов и владельцев транспортных средств;
6) непреодолимые трудности в обеспечении должного уровня качества контроля тормозных систем транспортных средств.
Последний недостаток связан с тем, что для получения полностью достоверной информации на роликовом стенде необходимо обеспечить полную массу испытуемого транспортного средства. Это требование связано с тем, что силы, которые должны создаваться тормозными системами (Fторм), находятся в прямой зависимости от веса транспортных средств (Ртр)

где μ - коэффициент сцепления колеса с опорной поверхностью.
На практике при поточном методе контроля тормозных систем чрезвычайно сложно обеспечить по организационно-техническим причинам полную массу каждого транспортного средства. Поэтому указанный ГОСТ допускает контроль тормозных систем на роликовых стендах без загрузки подвижного состава до полной массы. Такое вынужденное послабление требований к контролю тормозных систем снижает надлежащий уровень безопасности движения транспортных средств, работающих в груженом состоянии. Это особо актуально для общественного пассажирского и грузового подвижного составов, для которых масса в груженом состоянии отличается от снаряженной массы практически в два раза.
Указанный уровень безопасности движения также снижается и по той причине, что на роликовых стендах невозможно измерить требуемые тормозные силы, которые должны реализовываться при экстренном торможении. Необходимость такого контроля связана с тем, что при указанном режиме торможения происходит перераспределение веса транспортного средства, а поэтому его передние колеса существенно больше прижимаются к опорной поверхности, чем это имеет место в состоянии покоя транспортного средства при проведении стендовых испытаний.
Целью изобретения является повышение качества получаемой оперативной диагностической информации и расширение области применения инструментальной диагностики тормозных систем транспортных средств. Эта цель достигается тем, что контрольный момент (Mк), прикладываемый к испытуемому колесу 1, образуют за счет веса транспортного средства (Ртр), действующего на это колесо, и реакции (Rоп) опоры 2, полностью воспринимающей указанный вес через измерительный рычаг 3, который перед испытанием одним концом жестко закрепляют на этом колесе вдоль плоскости его вращения, а свободную часть рычага располагают на указанной опоре, которую смещают от оси вращения колеса на заданное расстояние (L). При этом указанный контрольный момент прикладывают к вывешенному на нормативную высоту (h) колесу, находящемуся в заторможенном состоянии (фиг.1).
При такой схеме испытания тормозных сил контрольный момент Мк, прикладываемый к заторможенному колесу относительно центра его вращения, будет равен произведению силы реакции опоры Rоп на плечо L, величина которого равна расстоянию от указанного центра до точки контакта опоры с рычагом

Поскольку реакция опоры Rоп при полностью вывешенном и заторможенном колесе равна весу транспортного средства Ртр, значение контрольного момента может быть представлено в другом виде:
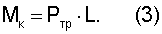
Перемещая опору 2 вдоль рычага 3, можно получить любое по величине плечо L, a значит и любой, как угодно большой, контрольный момент Мк. В результате этого становится возможным контролировать любые максимальные тормозные силы, не загружая балластом транспортные средства.
В рассматриваемой схеме контрольный крутящий момент Мк изменяется в результате изменения плеча L при постоянной силе веса транспортного средства Ртр. В связи с этим плечо L может являться контрольным параметром технического состояния тормозных систем транспортных средств и иметь нормативное значение, которое должно соответствовать достаточному тормозному моменту, обеспечивающему эффективное торможение в ситуациях, требующих использования наибольших тормозных сил. К таким ситуациям относятся: во-первых, торможение полностью груженого транспортного средства, во-вторых, торможение на сухом чистом асфальте, обеспечивающем наибольший коэффициент сцепления (μ=0,85), и, в третьих, торможение в экстренном режиме, при котором происходит увеличение силы прижатия передних колес к опорной поверхности (коэффициент, учитывающий экстренный режим торможения kэ для передних колес транспортного средства, может быть принят равным 1,2).
Тормозной момент, развиваемый на переднем колесе транспортного средства при этих условиях равен:

где  - вес груженого транспортного средства, который приходится на испытуемое колесо;
- вес груженого транспортного средства, который приходится на испытуемое колесо;
Rк - радиус колеса.
При проведении проверки исправности тормозной системы контрольный момент Мк, прикладываемый к испытуемому колесу, должен быть не меньше тормозного момента Мторм. В связи с этим становится возможным в выражении 4 заменить Мторм на контрольный момент Мк

С другой стороны, контрольный момент Мк равен произведению веса транспортного средства Ртр на нормативное плечо Lнорм. В связи с этим в левую часть выражения 5 становится возможным подставить указанное произведение

отсюда нормативное плечо Lнорм будет равно:

Для оценки практической величины Lнорм подставим, к примеру, в выражение 7 технические данные по автомобилю ГАЗ-3102 «Волга». Для этого автомобиля, находящегося в порожнем состоянии, сила веса Ртр, которая действует на переднее колесо, равна 418 кг. Сила веса груженого автомобиля, действующая на переднее колесо,  (данные для расчета взяты из статьи: Янчевский В. ГОСТ: НОВОЕ И СТАРОЕ. - Автотранспорт: эксплуатация, обслуживание, ремонт. №6, 2005). Радиус колеса Rк=32,1 см.
(данные для расчета взяты из статьи: Янчевский В. ГОСТ: НОВОЕ И СТАРОЕ. - Автотранспорт: эксплуатация, обслуживание, ремонт. №6, 2005). Радиус колеса Rк=32,1 см.
После подстановки этих данных получаем, что Lнорм=32,7 см. На этом плече испытуемое заторможенное колесо при исправной тормозной системе должно удерживаться на опоре в вывешенном неподвижном состоянии.
Полученное значение Lнорм позволяет говорить, что измерительное оборудование, реализующее данный способ, имеет компактный вид и может легко переноситься с места на место при выполнении ремонтных и диагностических работ по тормозным системам. Вместе с этим на такой длине можно производить точные измерения при оценке тормозных сил колес транспортных средств.
Испытание колесного тормозного механизма следует проводить при вывешивании колеса на нормируемую высоту над опорной поверхностью. Это условие связано с тем, что с подъемом колеса происходит увеличение нагрузки на него вследствие того, что вступает в действие стабилизатор поперечной устойчивости и происходит разгрузка соседнего по борту колеса. Регламентируемая высота подъема колеса над опорной поверхностью может контролироваться, например, с помощью щупа.
Технология проверки достаточной тормозной силы, которую способен развивать колесный тормозной механизм в указанных выше предельных условиях, осуществляется следующим образом.
Рычаг 3 жестко закрепляют на колесе 1 вдоль плоскости его вращения и располагают его на опоре 2. При этом точка контакта опоры с рычагом должна соответствовать плечу, которое является нормативным для данного вида испытуемого транспортного средства (Lнорм). Затормаживают контролируемое колесо. Переносят вес транспортного средства на опору путем поднятия испытуемого колеса за рычаг (если в качестве опоры используется домкрат) до нормируемой высоты. Если транспортное средство было ранее поднято, перенос веса на опору производится путем опускания этого средства до полного вывода подъемного устройства из-под него. Тормозной механизм считают исправным, если заторможенное колесо при этом сохраняет неподвижность, оставаясь в вывешенном над опорной поверхностью состоянии (фиг.2).
Для полноты контроля тормозных систем требуется также оценить относительную разность тормозных сил колес, находящихся на одной оси транспортного средства. В случае большой разности указанных сил транспортное средство при торможении подвержено опасности заноса. Этот тест выполняют сразу же после положительного прохождения первого испытания. При этом не меняют положение испытуемого колеса, которое должно оставаться в вывешенном и заторможенном состоянии. Для проведения контроля начинают передвигать опору 2 вдоль рычага 3. Передвижение опоры может осуществляться с помощью рукояти 6, имеющей жесткую связь с верхним колесиком 7 опоры. При этом указанное колесико, передвигаясь, толкает ползун 5, который предназначен для фиксации положения опоры. Передвижение опоры производят до тех пор, пока возрастающий крутящий момент не преодолеет тормозные силы и колесо в результате этого не провернется и не опустится на опорную поверхность. Далее фиксируют с помощью шкалы 4 на рычаге 3 и ползуна 5 критическое плечо Lкр, то есть то расстояние от оси вращения колеса, которого достигла опора 2 в момент опускания колеса (фиг.3). Аналогичные измерения выполняют с другой стороны оси транспортного средства и на основе двух измерений рассчитывают относительную разность тормозных сил (Δ), используя в расчетах величины критических плеч (Lкр).
Момент начала прокручивания и опускания колеса может осуществляться визуально или с помощью прибора, используемого для контроля горизонтальности, например с помощью ватерпаса, установленного на измерительный рычаг 3. Возможность такого использования связано с тем, что при прокручивании и опускании колеса 1 рычаг 3 начинает занимать наклонное положение. Кроме того, момент опускания колеса может определяться с помощью щупа или шлейф-ленты, которая прикрепляется к передвижной опоре и во время ее движения протягивается под колесом. По ее натяжению определяют момент касания колеса опорной поверхности.
Определение разности тормозных сил (Δ) согласно указанному ГОСТу осуществляется по формуле:

где Fп - тормозная сила, действующая на правом колесе;
Fл - тормозная сила, действующая на левом колесе. Сила, которая развивается тормозным механизмом, равна:

При передвижении опоры 2 вдоль измерительного рычага 3 и достижении ею критического плеча Lкр контрольный момент Мк становится равным тормозному моменту Мторм. В связи с этим можно заменить в выражении 9 тормозной момент Мторм на контрольный момент Мк, который в свою очередь равен произведению веса транспортного средства Ртр, на критическое плечо Lкр, то есть:

Подставляя в выражение 8 значения тормозной силы Fторм из формулы 10 и учитывая, что тормозным силам, измеренным с каждой стороны, соответствуют Lкр.max и Lкр.min, получаем:

Таким образом, относительную разность тормозных сил колес одной оси можно рассчитывать по указанным величинам Lкр.max и Lкр.min.
Тест считается пройденным, если относительная разность тормозных сил колес одной оси (относительная разность критических плеч Lкр.max и Lкр.min) не превышает более 20% (ГОСТ Р 51709-2001).
Рычаг 3 может закрепляться на колесе путем использования резьбовых элементов, крепления колеса к ступице.
Передвижная опора 2 может быть выполнена без деталей качения (колесиков). В этом случае конструкция удешевляется. Однако это вызывает некоторое увеличение трудоемкости контрольных работ, так как для передвижения опоры на определенное расстояние требуется каждый раз освобождать ее от давления рычага 3, передвигать этот узел и затем вновь нагружать его весом транспортного средства. И так шаг за шагом, пока испытуемое колесо не провернется и не опустится на опорную поверхность. Данный вариант целесообразно использовать при небольших, разовых потребностях контроля тормозных систем транспортных средств.
Согласно ГОСТ Р 51709-2001 нажатие на педаль тормоза должно осуществляться с нормируемым усилием. В настоящее время для этой цели используются датчики усилия на педали тормоза (например, датчик фирмы Bosch BSA 100). Указанный датчик устанавливается между ногой оператора и педалью тормоза, и при нажатии он выдает сигнал на переносной дисплей, который находится рядом с оператором. Такое техническое решение является нецелесообразным применительно к предлагаемому способу, так как вызывает необходимость привлечения двух операторов для проведения контроля. Один из них во время тестирования должен выполнять операции проверки, находясь возле испытуемого колеса. Второй в нужные моменты должен нажимать на педаль тормоза, контролируя по дисплею усилие нажатия.
Сокращение числа рабочих может быть достигнуто путем использования пневмоприводного механизма, состоящего из источника сжатого воздуха 1, переносного пульта управления 2, пневмоцилиндра 3 и нажимного штока 4 (фиг.4). Пневмоцилиндр и шток крепят к тормозной педали 5 и к ободу рулевого колеса 6. Переносной пульт управления снабжен вентилями и манометром для управления подачей сжатого воздуха и для контроля за давлением воздуха в системе. Источником сжатого воздуха может быть автомобильный ручной или ножной насос, автомобильный электронасос, гаражный компрессор.



Изобретение относится к области машиностроения, а именно к диагностированию тормозных систем автомобилей. Устройство содержит рычаг, имеющий измерительную шкалу. Рычаг выполнен с возможностью жесткого крепления к испытуемому колесу вдоль плоскости его вращения, при этом свободная часть указанного рычага в рабочем положении находится в силовом взаимодействии с находящейся под ним передвижной опорой. Контроль тормозных систем транспортных средств осуществляется путем приложения к испытуемому колесу контрольного крутящего момента. Контрольный момент образуют за счет веса транспортного средства, действующего на испытуемое колесо, и реакции опоры, полностью воспринимающей указанный вес через измерительный рычаг. Рычаг перед контролем одним концом жестко закрепляют на этом колесе вдоль плоскости его вращения, а свободную часть рычага располагают на опоре, которую смещают от оси вращения колеса на заданное расстояние. Контрольный момент прикладывают к вывешенному на нормативную высоту колесу, находящемуся в заторможенном состоянии. Достигается повышение качества получаемой оперативной диагностической информации и расширение области применения инструментальной диагностики тормозных систем транспортных средств. 2 н. и 3 з.п. ф-лы, 4 ил.
| US 5445013 А, 29.08.1995 | |||
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ЭФФЕКТИВНОСТИ ТОРМОЖЕНИЯ АВТОТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2242386C1 |
| Устройство для отображения информации | 1982 |
|
SU1113841A1 |
| US 5495753 A, 05.03.1996. | |||

