Изобретение относится к шахтным и рудничным неуравновешенным подъемным установкам, оборудованным двумя подъемными сосудами, и предназначено для подачи сигнала на срабатывание предохранительного тормоза привода шахтной подъемной установки (ШПУ) при зависании опускающегося подъемного сосуда в подъемном стволе и образовании напуска тягового каната.
Известен способ контроля зависания подъемного сосуда в шахтном стволе (SU 1676983 А1, В66В 5/02, 15.09.91, Бюл. №34) включающий определение и запись на начальном этапе цикла подъема в блок памяти значения массы поднимаемого груза, сравнение его далее с действительным и суждение о моменте зависания подъемного сосуда по отклонению действительного значения массы груза от записанного в блок памяти.
Недостатком указанного способа является то, что для определения массы груза необходимы расчетные коэффициенты, от точности расчета которых будет зависеть надежность работы, кроме того, на практике имеет место налипание груза на стенки сосуда, что изменяет его массу и соответственно будет вносить неточности в работу предложенного способа, что снижает его достоверность. Также в указанном способе для определения массы груза и записи в память ее значения используются три блока задержки, что увеличивает время начала контроля зависания и снижает надежность способа защиты.
Наиболее близким способом контроля напуска каната является способ (Авторское свидетельство №933594, В66В 5/12, 07.06.82, Бюл. №21), включающий определение действительного и допустимого значения статического усилия, их сравнение и суждение о моменте зависания (напуска каната) подъемного сосуда по отклонению действительного значения статического усилия от допустимого, причем необходимый наклон степени неуравновешенности установки задается заранее определяемым коэффициентом.
Недостатком указанного способа является то, что надежность контроля напуска будет зависеть от точности определения расчетных коэффициентов. Поскольку на практике эксплуатации подъемных сосудов имеет место налипание груза на их стенки, то это будет вносить погрешности как в значения рассчитанных коэффициентов, так и в степень неуравновешенности установки, что также будет снижать надежность предлагаемого способа.
Общими признаками с прототипом является определение действительного и допустимого значений статического усилия, их сравнение и суждение о моменте зависания подъемного сосуда по отклонению действительного значения статического усилия от допустимого.
Известна система обеспечения безопасности работы шахтных подъемных установок при застревании сосудов в стволе (SU 1676983, В66В 5/02, 15.09.91, Бюл. №34), содержащая блок задания постоянных масс, три блока сравнения, блок памяти, блок прогнозирования, блок задания уставки срабатывания, блок сигнализации, датчик силы тока, блоки задержки, четыре ключа и блок умножения.
Недостатком данной системы является то, что для ее осуществления необходим предварительный расчет коэффициента, зависящего от характеристик приводного двигателя, в связи с этим точность работы устройства будет зависеть от точности расчета данного коэффициента. Кроме того, в процессе эксплуатации параметры двигателей меняются, что в свою очередь также будет вносить погрешность в работу устройства. Имеет ограничения и область применения данного устройства, поскольку оно предназначено только для уравновешенных подъемных установок с противовесом.
Наиболее близким к заявляемому изобретению по совокупности признаков, устройством того же назначения, является устройство для защиты шахтного подъемника от напуска каната (Авторское свидетельство №933594, В66В 5/12, 07.06.82, Бюл. №21), содержащее блок задания допустимых значений статического усилия, включающий в себя датчик пути, узлы текущих значений движущего и динамического усилия, выходы которых подключены соответственно к одному и другому входам сумматора, исполнительный блок и блок сравнения, один из входов которого соединен с выходом сумматора, другой - с выходом блока задания допустимых значений статического усилия, а выход - с входом исполнительного блока.
Недостатком известного устройства является недостаточная надежность и достоверность контроля момента зависания, так как для задания наклона характеристики тока двигателя необходимо вносить предварительно рассчитанное число, от точности расчета которого будет зависеть и надежность работы устройства.
Общими признаками с прототипом являются блок отсчета времени, блок сравнения и исполнительный блок.
Технический результат заключается в повышении надежности и достоверности контроля момента зависания подъемного сосуда в шахтном стволе за счет обеспечения режима самонастраивания по реальным характеристикам тока приводного двигателя.
Технический результат достигается тем, что в способе защиты шахтной подъемной установки от напуска тяговых канатов, включающем установку и настройку устройства защиты шахтной подъемной установки от напуска тяговых канатов, определение действительного и допустимого значений статического усилия, их сравнение и суждение о моменте зависания подъемного сосуда по отклонению действительного значения статического усилия от допустимого, согласно изобретению в качестве характеристики статического усилия используют значение силы тока приводного двигателя подъемной машины, при этом определение допустимого значения характеристики силы тока приводного двигателя Iдоп осуществляют экспериментальным путем в два этапа - однократно при первоначальной настройке устройства защиты шахтной подъемной установки от напуска тяговых канатов и в каждом цикле подъема в процессе эксплуатации шахтной подъемной установки, при этом на первом этапе осуществляют цикл подъема сосуда без груза и цикл подъема сосуда с грузом, вес которого равен весу самого сосуда, с одновременной записью характеристик тока приводного двигателя Iп и Iс в память микроконтроллера и по истечении времени переходного процесса пуска приводного двигателя подъемной машины t1 определяют величину разности этих характеристик тока приводного двигателя ΔIс=Iс-Iп, а допустимое значение характеристики силы тока приводного двигателя Iдоп=ΔIгр+Iп+Iс определяют на втором этапе в режиме самонастраивания в каждом цикле подъема в зависимости от веса поднимаемого груза путем сложения величины разности характеристик тока приводного двигателя ΔIгр=Iд-Iп при подъеме сосуда с грузом в данном цикле подъема Iд и при подъеме пустого сосуда Iп, определенной на первом этапе, с определенными на первом этапе характеристиками силы тока приводного двигателя подъемной машины при подъеме пустого сосуда Iп и при подъеме сосуда с грузом, равным весу сосуда Iс, при этом суждение о моменте зависания сосуда производят по отклонению действительного значения силы тока приводного двигателя подъемной машины от допустимого по показаниям микроконтроллера.
Наилучший результат достигается тем, что определение допустимого значения характеристики силы тока приводного двигателя Iдоп на втором этапе производят по истечении промежутка времени t2, необходимого для расчета величины разности характеристик ΔIгр тока приводного двигателя при подъеме сосуда с грузом в данном цикле подъема и при подъеме пустого сосуда, определенной на первом этапе.
Другими словами способ защиты шахтной подъемной установки от напуска тяговых канатов заключается в установке и настройке устройства защиты шахтной подъемной установки от напуска тяговых канатов, определении действительного и допустимого значений силы тока приводного двигателя подъемной машины, их сравнение и суждение о моменте зависания подъемного сосуда по отклонению действительного значения от допустимого. При этом определение допустимого значения характеристики силы тока приводного двигателя осуществляют экспериментальным путем в два этапа - однократно при первоначальной настройке устройства защиты шахтной подъемной установки от напуска тяговых канатов и в каждом цикле подъема в процессе эксплуатации шахтной подъемной установки.
Технический результат заявляемого изобретения заключается в том, что устройство защиты шахтной подъемной установки от напуска тяговых канатов, включающее блок отсчета времени, блок сравнения и исполнительный блок, согласно изобретению снабжено блоком настройки отклонения веса сосуда, блоком настройки отклонения веса поднимаемого груза, блоком записи и хранения характеристики тока приводного двигателя при подъеме пустого сосуда, блоком записи и хранения характеристики тока приводного двигателя при подъеме груза, равного весу сосуда, блоком контроля допустимого значения силы тока приводного двигателя, блоком контроля действительного значения силы тока приводного двигателя, причем блок настройки отклонения веса сосуда своими тремя входами соединен с выходом блока отсчета времени, выходом блока записи и хранения характеристики тока приводного двигателя при подъеме груза, равного весу сосуда, выходом блока записи и хранения характеристики тока приводного двигателя при подъеме пустого сосуда, блок настройки отклонения веса поднимаемого груза своими тремя входами соединен с выходом блока отсчета времени, выходом блока контроля действительного значения силы тока приводного двигателя, выходом блока записи и хранения характеристики тока приводного двигателя при подъеме пустого сосуда, блок контроля допустимого значения силы тока приводного двигателя соединен своими тремя входами с выходом блока настройки отклонения веса сосуда, выходом блока записи и хранения характеристики тока приводного двигателя при подъеме пустого сосуда, выходом блока настройки отклонения веса поднимаемого груза, блок сравнения своими тремя входами соединен с выходом блока контроля допустимого значения характеристики силы тока приводного двигателя, выходом блока контроля действительного значения силы тока приводного двигателя, выходом блока отсчета времени, а своим выходом соединен с исполнительным блоком, блок контроля действительного значения силы тока приводного двигателя своим выходом соединен с входом блока записи и хранения характеристики тока приводного двигателя при подъеме пустого сосуда, с входом блока записи и хранения характеристики тока приводного двигателя при подъеме груза, равного весу сосуда.
Введение в устройство блоков и записи и хранения реальных характеристик тока двигателя при подъеме пустого сосуда и сосуда с грузом, равным весу сосуда, блоков настройки отклонения веса сосуда и веса поднимаемого груза позволяет устранить неточности предварительного расчета наклона и значения допустимого значения статического усилия, а значит и повысить надежность и безопасность устройства защиты в целом.
Известны способы и устройства защиты от напуска каната (Кипервассер М.В. «Защита шахтных подъемных установок от напуска каната», кандидатская диссертация, Кемерово, 1995; SU 1676983 A1, В66В 5/02, 15.09.91, Бюл. №34) основанные на сравнении «идеальной» расчетной токограммы движения привода с реальными значениями тока в процессе работы подъемной машины.
В известных устройствах защиты замер токов и других необходимых величин производится на шунтах, а также трансформаторами тока и напряжения. В условиях сухой, не запыленной атмосферы машинного зала работа датчиков и линий связи практически абсолютно надежна. Однако в известных решениях используются «идеальные» расчетные токограммы, определяемые не в режиме самонастраивания, а путем предварительного расчета, что снижает надежность контроля и его достоверность.
В заявляемом изобретении, в отличие от известных решений, определение допустимого значения характеристики силы тока приводного двигателя и контроль момента зависания осуществляют экспериментальным путем в режиме самонастраивания. Именно такой режим обеспечивает новый механизм влияния отличительных признаков (контроль по току приводного двигателя) на достижение технического результата заявляемого изобретения - повышение надежности и достоверности контроля момента зависания подъемного сосуда в шахтном стволе.
Таким образом, неизвестность влияния отличительных признаков на достигаемый технический результат доказывает соответствие заявляемой группы изобретений условию патентоспособности «изобретательский уровень».
Изобретение поясняется чертежами.
На фиг.1 представлена функциональная схема устройства защиты шахтной подъемной установки от напуска тяговых канатов.
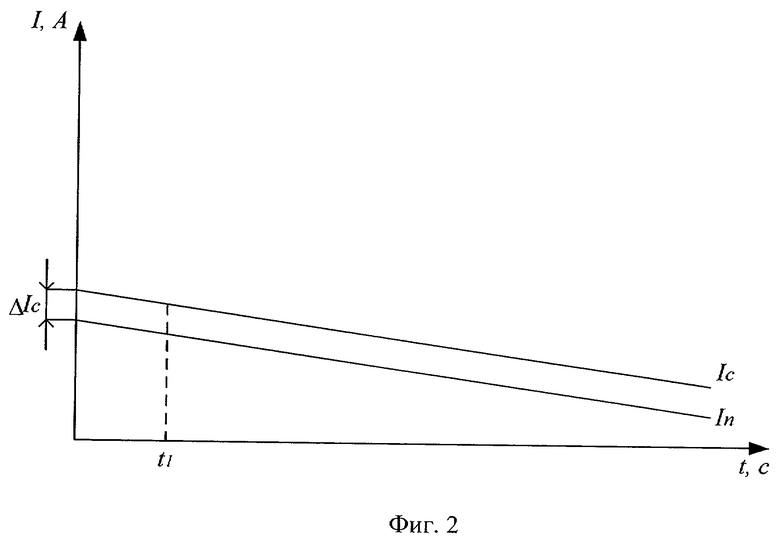
На фиг.2 представлены характеристики тока приводного двигателя при подъеме пустого сосуда и подъеме груза, равного весу сосуда, используемых для настройки отклонения веса сосуда.
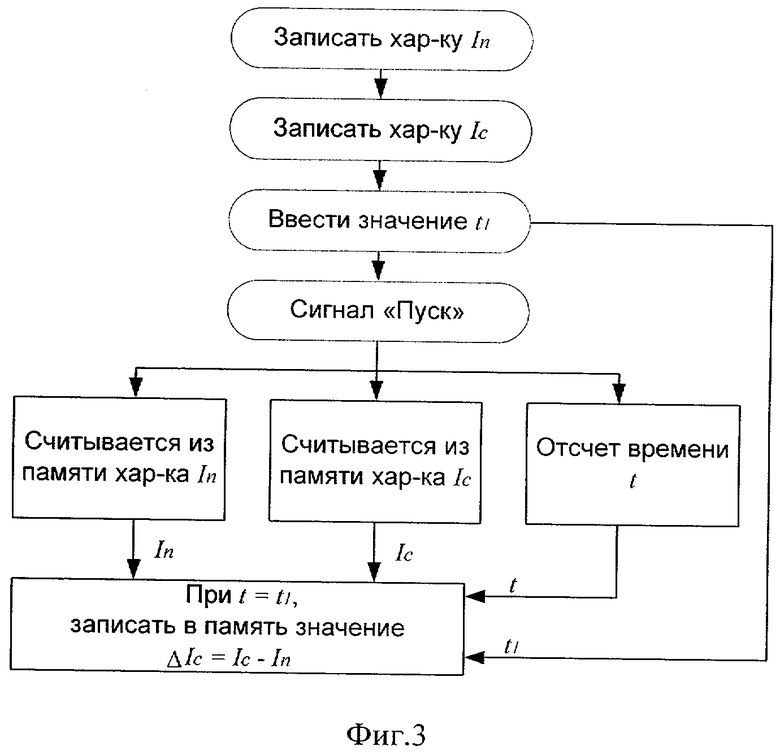
На фиг.3 представлен алгоритм определения отклонения веса сосуда.
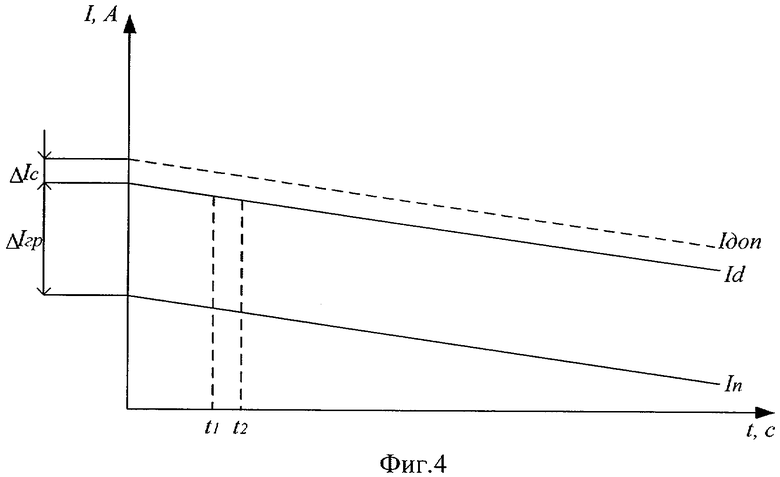
На фиг.4 представлены характеристики тока приводного двигателя, используемые для определения отклонения веса поднимаемого груза и контроля момента зависания сосуда.
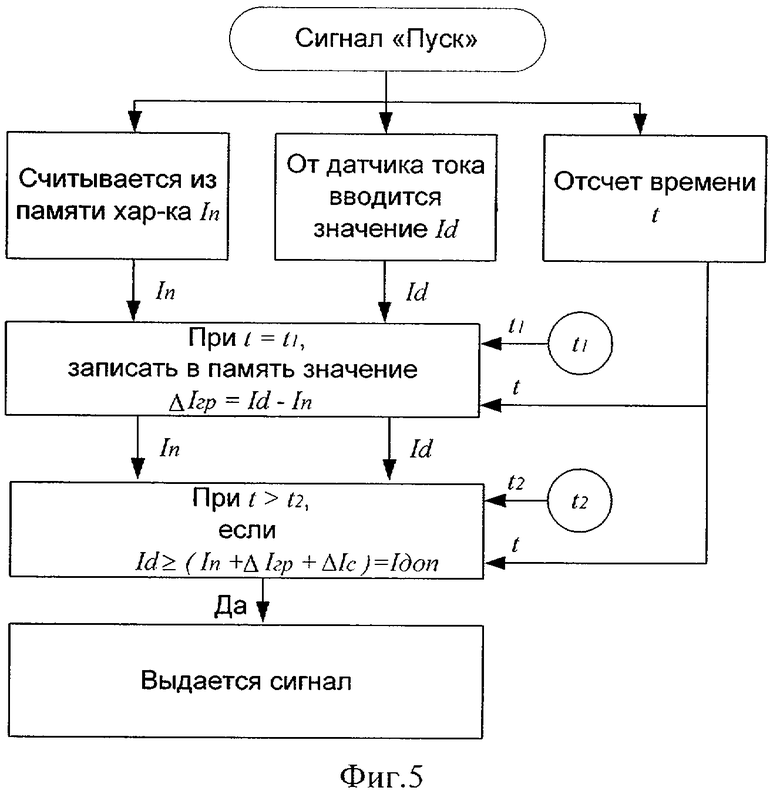
На фиг.5 представлен алгоритм определения отклонения веса поднимаемого груза и контроля момента зависания сосуда.
Способ защиты шахтной подъемной установки от напуска тяговых канатов заключается в установке и настройке устройства защиты шахтной подъемной установки от напуска тяговых канатов, определении действительного и допустимого значений силы тока приводного двигателя подъемной машины. Определение допустимого значения характеристики силы тока приводного двигателя Iдоп (фиг.4, 5) осуществляют экспериментальным путем в два этапа - однократно при первоначальной настройке устройства защиты шахтной подъемной установки от напуска тяговых канатов и в каждом цикле подъема в процессе эксплуатации шахтной подъемной установки. На первом этапе (фиг.2, 3) осуществляют цикл подъема сосуда без груза и цикл подъема сосуда с грузом, вес которого равен весу самого сосуда, с одновременной записью характеристик тока приводного двигателя Iп и Iс в память микроконтроллера и по истечении времени переходного процесса пуска приводного двигателя подъемной машины t1 определяют величину разности этих характеристик тока приводного двигателя ΔIс=Iс-Iп. На втором этапе (фиг.4, 5) определяют допустимое значение характеристики силы тока приводного двигателя Iдоп=ΔIгр+Iп+Iс в режиме самонастраивания в каждом цикле подъема в зависимости от веса поднимаемого груза путем сложения величины разности характеристик тока приводного двигателя ΔIгр=Iд-Iп при подъеме сосуда с грузом в данном цикле подъема Iд и при подъеме пустого сосуда Iп, определенной на первом этапе, с определенными на первом этапе характеристиками силы тока приводного двигателя подъемной машины при подъеме пустого сосуда Iп и при подъеме сосуда с грузом, равным весу сосуда Iс. Определение допустимого значения характеристики силы тока приводного двигателя Iдоп на втором этапе производят по истечению промежутка времени t2, необходимого для расчета величины разности характеристик ΔIгр тока приводного двигателя при подъеме сосуда с грузом в данном цикле подъема и при подъеме пустого сосуда, определенной на первом этапе.
Суждение о моменте зависания сосуда производят по отклонению действительного значения силы тока приводного двигателя подъемной машины от допустимого по показаниям микроконтроллера.
В заявляемом изобретении, в отличие от известных решений, определение допустимого значения характеристики силы тока приводного двигателя и контроль момента зависания осуществляют экспериментальным путем в режиме самонастраивания. Преимуществом данного подхода является то, что не нужно предварительно учитывать все параметры и рассчитывать идеальную характеристику, а достаточно записать реальные характеристики при движении пустых сосудов, подъеме груза равным весу сосуда и затем согласно алгоритму сравнивать определенным образом их разность с действительным значением тока приводного двигателя.
Устройство защиты шахтной подъемной установки от напуска тяговых канатов (фиг.1) содержит блок 1 контроля действительного значения силы тока приводного двигателя, блок 2 записи и хранения характеристики тока приводного двигателя при подъеме пустого сосуда, блок 3 записи и хранения характеристики тока приводного двигателя при подъеме груза, равного весу сосуда, блок 4 отсчета времени, блок 5 настройки отклонения веса сосуда, блок 6 настройки отклонения веса поднимаемого груза, блок 7 контроля допустимого значения силы тока приводного двигателя, блок 8 сравнения, исполнительный блок 9. При этом блок 5 настройки отклонения веса сосуда своими тремя входами соединен с выходом блока 4 отсчета времени, выходом блока 3 записи и хранения характеристики тока приводного двигателя при подъеме груза, равного весу сосуда, выходом блока 2 записи и хранения характеристики тока приводного двигателя при подъеме пустого сосуда Блок 6 настройки отклонения веса поднимаемого груза своими тремя входами соединен с выходом блока 4 отсчета времени, выходом блока 1 контроля действительного значения силы тока приводного двигателя, выходом блока 2 записи и хранения характеристики тока приводного двигателя при подъеме пустого сосуда. Блок 7 контроля допустимого значения силы тока приводного двигателя соединен своими тремя входами с выходом блока 5 настройки отклонения веса сосуда, выходом блока 2 записи и хранения характеристики тока приводного двигателя при подъеме пустого сосуда, выходом блока 6 настройки отклонения веса поднимаемого груза. Блок 8 сравнения своими тремя входами соединен с выходом блока 7 контроля допустимого значения характеристики силы тока приводного двигателя, выходом блока 1 контроля действительного значения силы тока приводного двигателя, выходом блока 4 отсчета времени, а своим выходом соединен с исполнительным блоком 9. Блок 1 контроля действительного значения силы тока приводного двигателя своим выходом соединен с входом блока 2 записи и хранения характеристики тока приводного двигателя при подъеме пустого сосуда и с входом блока 3 записи и хранения характеристики тока приводного двигателя при подъеме груза, равного весу сосуда.
Блоки записи и хранения информации, настройки отклонения и сравнения могут быть реализованы на 8-разрядных RISC-микроконтроллерах.
Устройство работает следующим образом.
Известно, что для неуравновешенных подъемных установок в момент зависания имеет место скачок тока на величину, пропорциональную весу опускающегося сосуда. Это связано с тем, что теряется уравновешивающая сила со стороны опускающегося сосуда. Поэтому достаточно предварительно рассчитать величину статического усилия, которое будет при зависании сосуда, и сравнивать в функции времени ее с действительным значением, и в случае их равенства судить о моменте зависания сосуда.
В предлагаемом устройстве величина статического усилия контролируется по величине тока приводного двигателя, а запись всех характеристик и реализация алгоритмов работы осуществляется микроконтроллером.
Для определения допустимого значения статического усилия в устройстве необходимо произвести предварительно первоначальную самонастройку, которая позволяет учесть параметры конкретной подъемной установки (фиг.2, 3). Для этого необходимо произвести два цикла подъема. В первом цикле записывается в память блока 2 характеристика изменения тока двигателя при подъеме пустого сосуда Iп. Во втором цикле подъема в блок 3 записывается характеристика изменения тока двигателя при подъеме груза, равного весу сосуда Iс, и в момент времени t1 (после окончания пускового процесса) в блоке 5 записывается разность ΔIс=Iс-Iп. Самонастройка устройства производится единожды при первичной ее установке.
Алгоритм контроля напуска каната в каждом текущем цикле подъема будет заключаться в следующем (фиг.4, 5). После сигнала пуска ШПУ, в момент времени t1, будет определяться и записываться в блок 6 величина ΔIгр=Id-Iп. Далее после времени t2 (необходимого для расчета ΔIгр), в блоке 7 в функции времени будет определяться значение допустимого значения статического усилия Iдоп, а в блоке 8 будет контролироваться неравенство Id≥Iдоп. В случае зависания опускающего сосуда произойдет скачок тока на величину ΔIс, что приведет к выполнению неравенства блока 8 сравнения, который через исполнительный блок 9 выдаст аналоговый сигнал в цепь защиты предохранительного тормоза. Преимуществом такого способа и устройства для его осуществления как раз является то, что не нужно предварительно учитывать все параметры и рассчитывать идеальную характеристику, а достаточно записать реальные характеристики тока двигателя при подъеме пустого сосуда, подъеме груза, равного весу сосуда, и затем согласно алгоритму сравнивать определенным образом их разность с действительным значением тока приводного двигателя, который прямо пропорционален статическому усилию.
Таким образом, используются достоверные значения параметров подъемной установки, осуществляется самонастройка устройства защиты и повышается надежность работы устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство защиты шахтного подъемника от напуска каната | 1980 |
|
SU933594A1 |
| Способ защиты шахтной подъемной установки от напуска каната | 1987 |
|
SU1572967A1 |
| ЭЛЕКТРОПРИВОД | 2012 |
|
RU2531380C2 |
| СПОСОБ ЗАЩИТЫ ШАХТНОЙ ПОДЪЕМНОЙ УСТАНОВКИ ОТ НАБЕГАНИЯ ГРУЖЕНЫХ ПОДЪЕМНЫХ СОСУДОВ НА ТЯГОВЫЕ КАНАТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ЗАЩИТА Н.Г.ОГНЕВА) | 1994 |
|
RU2104243C1 |
| Устройство для защиты шахтной подъемной установки при заклинивании подъемного сосуда в стволе | 1978 |
|
SU977348A2 |
| СПОСОБ ВЗВЕШИВАНИЯ ПОЛЕЗНОГО ГРУЗА В ПОДЪЕМНОМ СОСУДЕ ВО ВРЕМЯ ДВИЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2009096C1 |
| Система автоматического контроля и защиты шахтопроходческой бадьевой подъемной установки от напуска каната | 1982 |
|
SU1057395A1 |
| Устройство защиты шахтного подъемника от напуска каната | 1980 |
|
SU878720A1 |
| Шахтная подъемная установка | 1980 |
|
SU897682A1 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ШАХТНОЙ ПОДЪЕМНОЙ УСТАНОВКИ ОТ НАПУСКА ТЯГОВЫХ КАНАТОВ | 1991 |
|
RU2011626C1 |
Изобретение относится к шахтным и рудничным неуравновешенным подъемным установкам и предназначено для подачи сигнала на срабатывание предохранительного тормоза привода шахтной подъемной установки. Способ защиты шахтной подъемной установки от напуска тяговых канатов заключается в установке и настройке устройства защиты шахтной подъемной установки от напуска тяговых канатов. Определяют действительное и допустимое значение статического усилия. В качестве характеристики статического усилия используют значение силы тока приводного двигателя подъемной машины. Определение допустимого значения характеристики силы тока приводного двигателя осуществляют экспериментальным путем в два этапа. На первом этапе осуществляют цикл подъема сосуда без груза и цикл подъема сосуда с грузом. Вес груза равен весу сосуда. На втором этапе определяют допустимое значение характеристики силы тока приводного двигателя. Устройство защиты шахтной подъемной установки от напуска тяговых канатов содержит блок контроля действительного значения силы тока приводного двигателя, блок записи и хранения характеристики тока приводного двигателя при подъеме пустого сосуда, блок записи и хранения характеристики тока приводного двигателя при подъеме груза, равного весу сосуда, блок отсчета времени, блок настройки отклонения веса сосуда, блок настройки отклонения веса поднимаемого груза, блок контроля допустимого значения силы тока приводного двигателя, блок сравнения, исполнительный блок. Технический результат заключается в повышении надежности и достоверности контроля момента зависания подъемного сосуда в шахтном стволе за счет обеспечения режима самонастраивания по реальным характеристикам тока приводного двигателя. 2 н. и 1 з.п. ф-лы, 5 ил.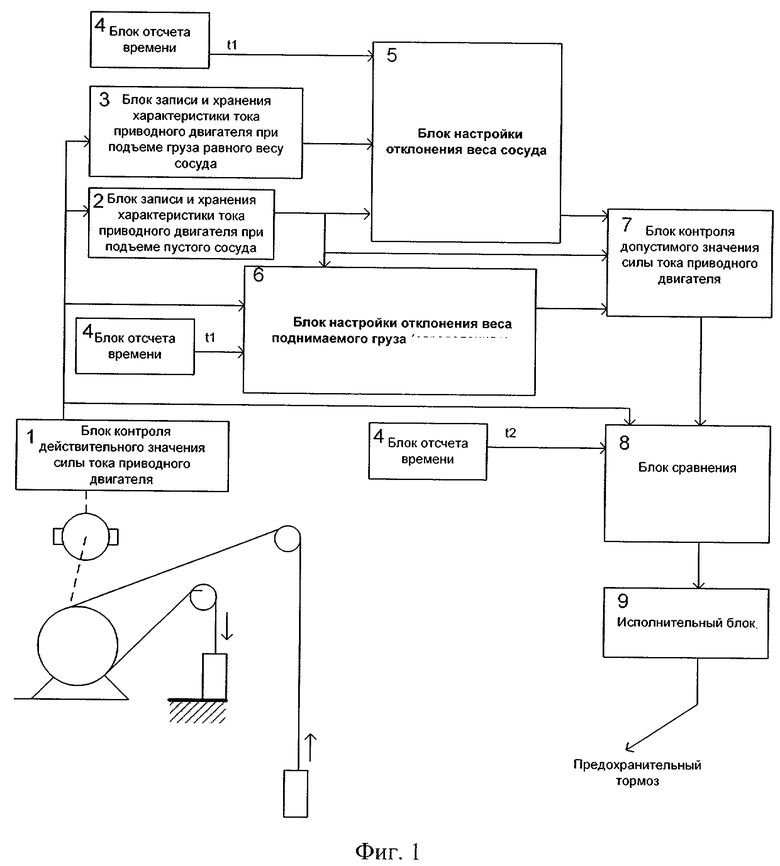
| Устройство защиты шахтного подъемника от напуска каната | 1980 |
|
SU933594A1 |
| Система обеспечения безопасности работы шахтных подъемных установок при застревании сосудов в стволе | 1989 |
|
SU1676983A1 |
| СПОСОБ ЗАЩИТЫ ШАХТНОЙ ПОДЪЕМНОЙ УСТАНОВКИ ОТ НАБЕГАНИЯ ГРУЖЕНЫХ ПОДЪЕМНЫХ СОСУДОВ НА ТЯГОВЫЕ КАНАТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ЗАЩИТА Н.Г.ОГНЕВА) | 1994 |
|
RU2104243C1 |
| JP 2003118946 A, 23.04.2003. | |||

