Изобретение относится к устройствам и системам обеспечения безопасности работы шахтных подъемных установок.
Цель изобретения - повышение надежности контроля м предупреждения аварийных ситуаций.
На фиг. 1 приведена схема системы обеспечения безопасности работы шахтных подъемных установок при застревании сосудов в стволе; на фиг. 2 - временная циклограмма работы блоков, входящих в систему.
Система обеспечения безопасности работы шахтных подъемных установок при за- стревании сосудов в стволе (фиг. 1) содержит датчик 1 силы тока, выполненный в виде токоизмерительного шунта и установленный в цепи якоря двигателя подъемной машины, первый блок 2 задержки, второй блок 3 задержки, третий блок 4 задержки, первый ключ 5, блок 6 умножения, первый блок 7 сравнения, второй ключ 8, блок 9 задания постоянных масс, блок 10 памяти, третий ключ 11, четвертый ключ 12, второй блок 13 сравнения, третий блок 14 сравнения, блок 15 задания уставки срабатывания, блок 16 прогнозирования,блок 17 сигнализации останова подъема машины. При этом выход датчика 1 силы тока соединен с одним входом первого ключа 5, к управляющему входу системы подключены входы трех блоков задержки 2, 3 и 4, и входы четырех ключей 5, 8, 11 и 12, выход первого блока 2 задержки подключен к входам первого 5 и второго 8 ключей, выход второго блока 3 задержки подключен к вхот ду блока памяти, а выход третьего блока 4 задержки подключен к входам третьего 11 и четвертого 12 ключей, выход ключа 5 соединен через блок б умножения с одним входом блока 7 сравнения, с другим входом которого соединен через блок 6 умножения с одним входом блока 7 сравнения, с другим входом которого соединен выход ключа 8, к другому входу которого подключен блок 9 задания постоянных масс, выход блока 7 сравнения подключен к другому входу блока 10 памяти и через ключ И - к одному входу блока 13 сравнения, выход блока 10 памяти подключен через ключ 12 к другому входу блока 13 сравнения, выход которого подключен к блоку 16 прогнозирования и через первый вход блока 14 сравнения - к блоку 17 сигнализации, а к второму входу блока 14 подключен блок 15 задания уставки срабатывания.
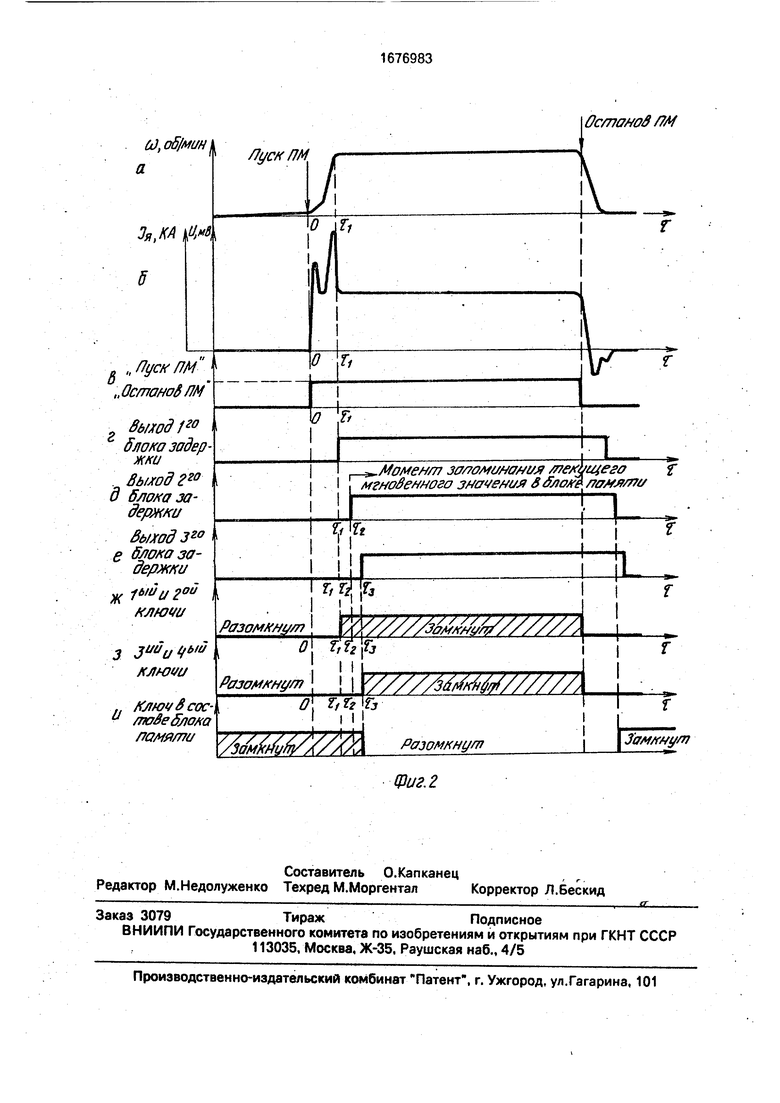
На фиг. 2 (а-и) обозначены: а - узловая скорость, вращения двигателя подъемной машины (ПМ); б - сила тока я в цепи якоря двигателя ПМ и пропорциональный ей сигнал (напряжение) с шунта, установленного в цепи якоря двигателя ПМ; в - исходный сигнал управления двигателем ПМ, имеющий два состояния Пуск ПМ, Останов гвыход первого блока 2 задержки; д - выход второго блока 3 задержки; е - выход третьего блока 4 задержки; ж - состояние первого ключа 5 и второго ключа 8 (замкнут, разомкнут); з - состояние третьего ключа 11 и
четвертого ключа 12; и - состояние ключа, входящего в состав блока 10 памяти.
Система работает следующим образом. Моментом начала работы системы (условно принятым за момент г 0) является
сигнал Пуск ПМ), поступающий с управляющего входа системы и изменение которого показано на фиг. 2в. Этот сигнал подается дежурным машинистом ПМ по мере производственной необходимости при помощи
командоаппарата.
На фиг. 2а приведен график изменения угловой скорости вращения двигателя ПМ. Весь цикл движения состоит из трех участков:
- первый участок (т о-ri)-участок разгона, где подъемный сосуд с грузом движется с ускорением до момента ri набора максимальной линейной скорости;
-второй участок - участок движения подъемного сосуда с равномерной скоростью;
-третий участок - уча сток торможения (после команды Останов ПМ).
На фиг. 26 приведен график изменения
тока якоря я двигателя ПМ. Начиная с момента пуска ( т- 0) протекают переходные процессы в цепи якоря, которые длятся до момента ri (г 5-8с), после чего ток якоря стабилизируется (также, как и скорость перемещвния подъемного сосуда). Напряжение U, снимаемое с шунта 1, включенного в цепь якоря ПМ, пропорционально току якоря
и 1ят,
где г - активное сопротивление датчика 1.
Характер изменения напряжения U повторяет динамику я, поэтому они изображены на одном графике в соответствующих осях. Выход датчика 1 является информационным входом системы.
По мере пойвяения на управляющем входе системы сигнала Пуск ПМ (фиг. 2в) он, попадая на вторые управляющие входы ключейб.3,11,12, замыкает вторые каскады
этих ключей.
Появление на управляющем входе системы сигнала Пуск ПМ приводит к замыканию ключей, входящих во второй каскад каждого из ключей 5, 8, 11 и 12. Однако
полностью ключи 5, 8, 11 и 12 еще не замкнуты, так как разомкнуты их первые каскады.
В первом, втором и третьем блоках задержки 2. 3 и 4 реализуется передаточная функция чистого временного запаздывания
. При этом для первого блока 2 задержки имеем е 1, для второго блока 3 задержки е , а для третьего блока 4
задержки . На фиг. 2г, д, е приведены выходные сигналы блоков задержки.
По достижению момента времени п сигнал на выходе первого блока 2 задержки изменяется с низкого уровня на высокий (фиг. 2г) и поступает на первый управляющий вход первого ключа 5 и на первый управляющий вход второго ключа 8.
При этом происходит замыкание ключей, входящих в первые каскады первого ключа 5 и второго ключа 8 и тем самым оба ключа 5 и 8 замкнуты. Вследствие этого сигнал U поступает на вход блока 6 умножения.
В блоке 6 умножения производится умножение вида
A U -К, где А - выходной сигнал блока 6 умножения;
U - сигнал датчика 1;
К- коэффициент пропорциональности, равный
if - с Ф -R т1
где С - константа двигателя ПМ;
Ф - магнитный поток (обмотки) возбуждения двигателя ПМ;
q - ускорение свободного падения, м/с,
R - радиус барабана подъемной машины, м;
г - активное сопротивление датчика 1, Ом.
Выходной сигнал А блока 6 умножения поступает на первый вход первого блока 7 сравнения. На второй вход первого блока 7 сравнения через замкнутый второй ключ 8 поступает сигнал D с выхода блока 9 зада- ния постоянных масс, равный D (mnc-mnp), где тПс масса подъемного сосуда, a mnp - масса противовеса ПМ. В первом блоке 7 сравнения производится вычитание
тгр А - D, где тгр - масса груза в подъемном сосуде.
Из приведенных выше формул следует;
m A-D U К- (rrtnc - mnp)
- я
г с Ф ,
р . (Ttnc - mnpj
g
Отсюда
i с Ф t
ПГ1гр - 1я . р (ГПпс fTlnpj .
0
Выражение (1) получено как описание набора функций, реализуемых блоками системы (фиг. 1).
При равномерном движении подъемного сосуда, т.е., при г п (см. фиг. 2), момент вращения двигателя Мдв.. исходя из равенства моментов, равен (см. фиг. 1)
Мдв g R (mnc + тгр + тгк + тук) -д ((гппр + тгк + тук ), |де тпс масса подъемного сосуда;
5
0
5
0
5
0
5
тгр - масса груза;
тгк , - массы головного и уравновешивающего канатов, находящихся на стороне подъемного сосуда; 5 гппо - масса противовеса;
тгк . тук - массы головного и уравновешивающего канатов, находящихся на стороне противовеса.
Так как имеет место равенство (т + 0 ту,-.1) (тгк + тук), то
Мда Q R (mnc f mrp) - g R тпро,
откуда
(гппс-тпр).
mrp
Вместе с тем для применяемых в шахтных подъемных установках двигателях с независимым возбуждением:
Мдв С- 1Я- Ф)
Отсюда
Ј $У
mrp I . - (mnc - тпр) .
что полностью идентично формуле (1). Таким образом, на выходе первого блока 7 сравнения имеется сигнал, равный (пропорциональный) массе груза в подъемном сосуде. С выхода первого блока 7 сравнения сигнал поступает на инерционный йход блока 10 памяти и инерционный вход третьего ключа 11,
В момент времени TI/TZ - п, где (Г2 - TI)- интервал времени, необходимый для вычисления mrp, на выходе второго блока 3 задержки (см. фиг. 2д) сигнал изменяется с низкого уровня на высокий и поступает на управляющий вход блока 10 памяти. При этом в блоке 10 памяти производится запоминание мгновенного значения сигнала, поданного на его информационный вход, т.е ., величины тГр в момент Г2 .
На процесс замыкания информации в блоке 10 памяти отводится интервал времени (тз - гг). В момент времени гз сигнал нз выходе третьего блока 4 задержки изменяется с низкого уровня на высокий уровень. Этот сигнал, поступая на первые управляющие входы третьего ключа 11 и четвертого ключа 12 переводит эти ключи в состояние замкнут, в результате чего выходные сигналы блока 10 памяти и первого блока 7 сравнения поступают на второй и первый входы блока 13 сравнения соответственно. Во втором блоке 13 сравнения определяется разность оценки текущего значения массы груза тгр (г) , находящегося в подъемном сосуде в момент времени т Гз, и массы груза, запомненной в блоке 10 памяти в момент тг второго блока 13 сравнения. С выхода второго блока 13 сравнения полученный сигнал разности поступает на первый вход третьего блока 14 сравнения и на вход блока 16 прогнозирования. На второй вход третьего блока 14 сравнения поступает сигнал с выхода блока 15 задания уставки срабатывания,
Третий блок 14 сравнения реализует следующую логическую функцию
У (г)
В, если Д I Д
S если Д Д где у(г) - выходной сигнал третьего блока 14 сравнения, имеющий два уровня В и О; Д - выходной сигнал второго блока 13
сравнения;
а Д - выходной сигнал блока 15 задания
уставки срабатывания.
Если разность Д между начальной массой груза тгр (c-i) в подъемном сосуде и текущей массой mrp (г Гз) станет больше некоторого максимально допустимого значения (уставки) Д , то эта ситуация класси- фицироуется, как застревание подъемного сосуда в стволе и напуск головного каната. В этом случае сигнал с выхода третьего блока 14 сравнения поступает на вход блока 17 сигнализации.
Последний (блок 17) выполнен в виде реле, реагирующего на сигнал В от предыдущего блока 14 и размыкающего соответствующие контакты для приведения в действие цепей сигнализации и предохранительного торможения ПМ.
Блок 16 прогнозирования позволяет наблюдать по регистрируемой кривой, отображающей динамику значения Д и, на этой основе экстраполировать возможные аварийные ситуации.
В момент поступления сигнала Останов ПМ (см. фиг. 2) происходит.размыкание второго, первого, третьего и четвертого ключей 5, 8, 11, 12 и тем самым система отклю- чения от выхода.
Таким образом, предлагаемая система позволяет достичь желаемого результата, а именно, осуществлять контроль и предупреждать аварийные ситуации при застрева- нии сосудов в стволе.
Формула изобретения Система обеспечения безопасности работы шахтных подъемных установок при застревании сосудов в стволе, включающая блок задания постоянных масс, первый блок сравнения, блок памяти, второй блок сравнения, вход которого подключен к первому входу третьего блока сравнения и входу блока прогнозирования, блок задания уставки срабатывания, подключенный к второму входу третьего блока сравнения, выход которого подключен к блоку сигнализации, о т- личающаяся тем, что, с целью повышения надежности контроля, она снабжена датчиком силы тока, тремя блоками задержки, четырьмя ключами и блоком умножения, причем выход первого блока задержки подключен к первым входам первого и второго
ключей, аыход второго блока задержки под блоки к первому входу блока памяти, выход третьего блока задержки подключен к первым входам третьего и четвертого ключей, выход датчика силы тока соединен с вторым
входом первого ключа, выход которого через блок умножения соединен с одним входом первого блока сравнения, к другому входу которого подключен выход второго ключа, к второму входу которого подсоединен блок задания постоянных масс, выход первого блока сравнения соединен с вторыми входами блока памяти и третьего ключа, выход блока памяти подключен к второму входу четвертого ключа, выход которого и
выход третьего ключа соединены с соответствующими входами второго блока сравнения, третьи входы первого, второго, третьего и четвертого ключей объединены с входами первого, второго и третьего блоков задержки и являются управляющими входами системы.

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ЗАЩИТЫ КОНВЕЙЕРА ПРИ ОБРЫВЕ ЛЕНТЫ | 2012 |
|
RU2483998C1 |
| УСТРОЙСТВО ЗАЩИТЫ ТУРБОКОМПРЕССОРА ОТ ОСЕВОГО СДВИГА | 2013 |
|
RU2531465C1 |
| УСТРОЙСТВО ОРГАНИЧЕНИЯ ГРУЗОПОДЪЕМНОСТИ МОСТОВОГО КРАНА | 2014 |
|
RU2566459C1 |
| УСТРОЙСТВО ЗАЩИТЫ ШАХТНЫХ ПОДЪЕМНЫХ УСТАНОВОК ОТ ПРОСКАЛЬЗЫВАНИЯ КАНАТА | 2013 |
|
RU2553619C1 |
| Устройство управления электроприводом рудничной подъемной установки | 1986 |
|
SU1330066A1 |
| УСТРОЙСТВО ДЛЯ ПРОВЕДЕНИЯ ЛАБОРАТОРНЫХ РАБОТ ПО ЭЛЕКТРОТЕХНИКЕ | 1990 |
|
RU2030791C1 |
| Анализатор влажности | 1982 |
|
SU1073644A1 |
| Устройство для определения степени окисления углерода до окиси углерода в полости конвертора | 1986 |
|
SU1399350A1 |
| Устройство для пуска подъемной машины | 1990 |
|
SU1778058A1 |
| Устройство для задания режима движения шахтной подъемной установки | 1986 |
|
SU1444265A2 |
Изобретение относится к обеспечению безопасности работы шахтных подъемных установок. Цель - повышение надежности контроля и предупреждения аварийных ситуаций. Система состоит из блока 9 задания постоянных масс, блока 16 прогнозирования, блока 15 задания уставки срабатывания, блока памяти (БП) 10, трех блоков сравнения (БС) 7,13, 14 и блока 17 сигнализации. Дополнительно система снабжена датчиком 1 силы тока, тремя блоками 2, 3 и 4 задержки, четырьмя ключами (К) 5, 8,11 и 12 и блоком 6 умножения. Появление на l/VeuniafiMtrat Систенн управляющем входе системы сигнала Пуск ПМ приводит к замыканию К 5, 8, 11 и 12, входящих во второй каскад каждого из К 5, 8,11,12. В блоках 2, 3, 4 задержки реализуется передаточная функция чистого временного запаздывания. При достижении момента времени т сигналом с выхода блока 2 замыкаются К 5 и 8 и на вход блока 6 поступает сигнал с датчика 1. Выходной сигнал А с блока 6 поступает на первый вход БС 7, на второй вход которого через К 8 поступает сигнал D с выхода блока 9. На выходе БС 7 формируется сигнал, равный массе груза тф в подъемном сосуде. С выхода БС 7 сигнал поступает на инерционные входы К 11 и БП 10. В последнем производится запоминание мгновенного значения сигнала тгр в момент Г2 . В момент времени Гз сигнал на выходе блока 4, поступая на первые управляющие входы К 11 и 12, переводит их в состояние Замкнут. В результате сигналы БП 10 и БС 7 поступают на входы БС 13. С выхода БС 13 сигнал разности поступает на входы БС 14 и блока 16. На второй вход БС 14 поступает сигнал с выхода блока 15. Сигнал разности с БС 14 поступает на блок 17 сигнализации. 2 ил. fe Os v| О Ю 8 
| Система защиты шахтных подъемных установок при застревании сосудов в стволе | 1978 |
|
SU698894A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Чугунный экономайзер с вертикально-расположенными трубами с поперечными ребрами | 1911 |
|
SU1978A1 |
| Система обеспечения безопасности работы шахтных подъемных установок при застревании сосудов в стволе | 1977 |
|
SU679504A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
