Изобретение относится к области машиностроения, а именно к силовым агрегатам, в основе которых лежит поршневой двигатель внутреннего сгорания.
Из существующего уровня техники известна классическая схема преобразования возвратно-поступательного поршней с шатунами во вращательное движение коленчатого вала (см. кн.: «Физика», редактор академик Г.С.Ландсберг, издательство «Наука», 1972 г.). В данной схеме на поршни воздействуют значительные боковые силы, а это приводит к повышенному износу поршней и коленвалов.
Также известен аксиальный гидромотор, где преобразование возвратно-поступательного движения поршней со штоками происходит за счет воздействия штоков на наклонную плоскость (см. кн.: «Основы гидравлики и гидропривод», Сафонов). В данной схеме преобразования возвратно-поступательного движения во вращательное вращается не только наклонная плоскость, но и узел с установленными в нем поршнями, что неприемлемо для поршневых двигателей внутреннего сгорания.
Наиболее близким техническим решением по назначению, сущности и количеству общих существенных признаков является двигатель внутреннего сгорания, имеющий в своем составе корпус с, по меньшей мере, одним цилиндром с клапанами, внутри которого поршень со штоком совершает возвратно-поступательное движение, преобразование которого во вращательное движение вала обеспечивается воздействием штока на кривую поверхность (см. выложенную патентную заявку Германии №2500608 А1, МПК F02B 75/32, опубл. 15.07.1976). Однако данный двигатель не может обеспечить бесступенчатого регулирования частоты вращения выходного вала, а также не обеспечивает возможности реверсирования направления вращения и возможности отключения при ненадобности штоков поршней от кривых поверхностей.
Технический результат изобретения заключается в обеспечении возможности сжигания топлива над поршнем при повышенном давлении и преобразовании возвратно-поступательного движения поршней во вращательное движение первичных валов без боковых усилий при бесступенчатом регулировании частоты вращения вторичного вала методом сочленения двигателя внутреннего сгорания с электромеханической передачей. При использовании заявляемого способа в сочетании с одним из вариантов исполнения заявленного устройства появляется возможность использования всех достоинств поршневых двигателей внутреннего сгорания и бесступенчатых редукторов в сочетании с малой массой устройства.
Заявленный технический результат осуществляется посредством способа преобразования возвратно-поступательного движения штока во вращательное движение вала, заключающегося в воздействии штока поршня на кривую поверхность, при этом кривых поверхностей выполняют две, образовывая их на цилиндрах разного диаметра и связывая их каждую со своей конической шестерней. Между коническими шестернями помещают не менее двух сателлитов, которые устанавливают на корпусе. Во время рабочего хода шток воздействует на кривые поверхности, в результате чего цилиндры с кривыми поверхностями получают синхронное вращение навстречу друг другу. Возврат штока в исходное положение обеспечивается за счет кинетической энергии, накопленной цилиндрами с кривыми поверхностями, при этом обеспечивают гашение вращающего момента штока и возможность отключения штоков от кривых поверхностей при ненадобности. Конец штока связан с двумя вращающимися роликами, которые опираются на кривые поверхности, либо шток воздействует на кривые поверхности через вращающийся относительно оси штока конус, при этом равномерность опирания роликов или конуса на поверхности достигают путем поворота корпуса с сателлитами вокруг оси. Конус, посредством которого шток воздействует на кривые поверхности, выполняют ступенчатым, а боковую поверхность ступени опирают на внутреннюю поверхность внешнего цилиндра, обеспечивая этим гашение изгибающего момента штока. Вращающий момент штока гасят либо установкой ограничителя на корпусе, либо посредством того, что шток изготавливают некруглым.
Для осуществления заявленного технического результата вышеуказанный способ применяют в двигателе внутреннего сгорания, имеющем в своем составе корпус с, по меньшей мере, одним цилиндром с клапанами, внутри которого поршень со штоком совершает возвратно-поступательное движение. Согласно изобретению преобразование возвратно-поступательного движения поршня со штоком во вращательное движение вала обеспечивается воздействием штока на две кривые поверхности, выполненные в виде синусоид, которые образованы на торцах двух цилиндров разного диаметра. При этом двигатель обеспечивается средствами для гашения вращающего момента штока и для отключения штоков поршней от кривых поверхностей при ненадобности. С одной из синусоид связано водило планетарного редуктора, его сателлиты связаны с коронной и солнечной шестернями, солнечная шестерня в свою очередь связана с якорем или ротором универсальной электрической машины, установленной на корпусе ДВС - в его главной оси. За счет подобной схемы установки универсальной электрической машины вращение цилиндров с кривыми поверхностями может осуществляться как от возвратно-поступательного движения поршней при сгорании топлива, так и при всех отключенных поршнях только от электроэнергии, и комбинировано - от работы поршней и электроэнергии. Электромашина в период рабочего хода поршней может вводиться в режим генератора, а в период сжатия смеси над поршнями - в режим электродвигателя, при этом электромашина соответственно заряжает или питается от конденсатора или аккумулятора. Шток поршня воздействует на кривые поверхности, выполненные в виде синусоид, посредством либо установленных на нем вращающихся роликов, либо сопряженного с синусоидами конуса, установленного на конце штока с возможностью вращения в его оси. Конус выполнен ступенчатым, а боковая поверхность ступени сопрягается с внутренней поверхностью внешнего цилиндра, на торце которого выполнена кривая поверхность в виде синусоиды.
Согласно одному из вариантов выполнения изобретения синусоиды кривых поверхностей соединены каждая со своей конической шестерней, а на корпусе между шестернями установлено не менее двух сателлитов.
В случае, если вместе с цилиндрами, на которых выполнены кривые поверхности, вращаются первичные валы, кинематически жестко связанные с вторичным валом, двигатель выполняют таким образом, что цилиндры с кривыми поверхностями опирают на подшипники.
Согласно изобретению двигатель также может быть выполнен таким образом, что снизу двигателя также устанавливаются цилиндры с поршнями. При этом цилиндры с кривыми поверхностями соединены с тремя коническими шестернями: внутренние цилиндры соединены с крайними шестернями, а внешние - с внутренней шестерней, которая имеет зубья с двух сторон. В этом случае между коническими шестернями устанавливается не менее четырех сателлитов. С верхней шестерней соединен полый вал, на котором жестко установлена, по меньшей мере, одна шестерня, соединенная с установленной на корпусе цилиндра паразитной шестерней, паразитная шестерня в свою очередь соединена с зубчатым колесом вторичного вала. Может быть симметрично установлено более одной паразитной шестерни, при этом паразитные шестерни соединены с шестерней внутреннего зацепления.
На корпусе двигателя может быть установлено не менее двух цилиндров с поршнями и штоками или один цилиндр. Если на корпусе двигателя установлен один цилиндр, то его располагают в главной оси двигателя, при этом шток поршня связан с коромыслом, на котором установлены конусы или ролики, сопряженные диаметрально с синусоидами. На цилиндры могут устанавливаться индивидуальные рубашки для их охлаждения, при этом каждый цилиндр имеет продувочные окна, выполненные выше нижней мертвой точки хода поршня с возможностью принудительной продувки цилиндра воздухом. Двигатель также может быть выполнен четырехтактным.
Изобретение поясняется чертежами на фиг.1-3, где используются следующие обозначения:
1 - соленоид управления выхлопным клапаном;
2 - коллектор выхлопных газов;
3 - выхлопной клапан;
4 - поршень;
5 - рабочий цилиндр;
6 - универсальная электрическая машина;
7 - крышка корпуса;
8 - носитель сателлитов планетарного редуктора;
9 - конические шестерни;
10 - сателлиты;
11 - конус;
12 - соленоид удержания штока в верхнем положении;
13 - шток;
14 - окна продувочные;
15 - коллектор воздуховода;
16 - коллектор выхлопных газов;
17 - боек;
18 - наковальня;
19 - цилиндр с кривой поверхностью на торце;
20 - внутренний цилиндр с кривой поверхностью на торце;
21 - водило планетарного редуктора;
22 - коронная шестерня планетарного редуктора с валом;
23 - кривая поверхность;
24 - контакт управления соленоидами;
25 - контакт управления зажиганием;
26 - шестерня коронная;
27 - паразитная шестерня;
28 - корпус;
29 - шестерня;
30 - редуктор планетарный;
31 - шестерня электромашины;
32 - вторая универсальная электромашина;
33 - шестерня мостового редуктора;
34 - щека штока;
35 - ролики;
36 - ось роликов;
37 - направляющая.
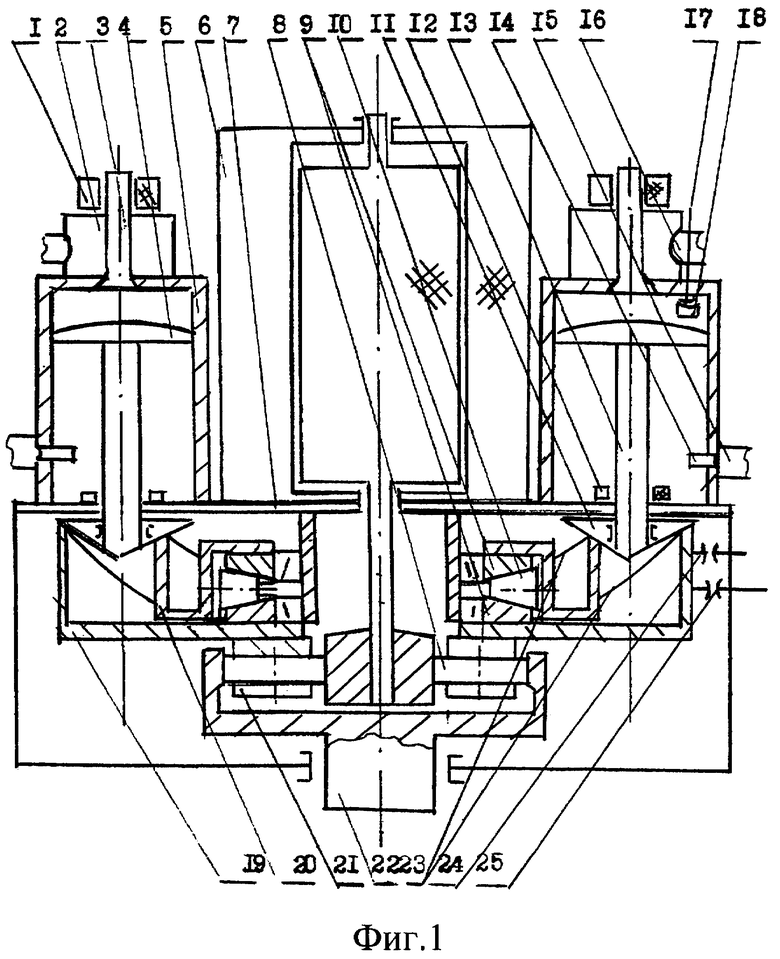
На фиг.1 приведена кинематическая схема электромеханического ДВС для привода рабочего органа с использованием реверс редуктора и без такового.
Устройство работает следующим образом. При подаче напряжения на электрическую машину 6 происходит проворот цилиндров 19 и 20 с кривыми поверхностями 23 так, что один из указанных цилиндров начинает вращаться в одну сторону, а второй - в другую. Кривые поверхности 23 воздействуют на штоки 13 через конусы 11 или ролики и сжимают воздух в рабочих цилиндрах 5, в верхней мертвой точке или раньше впрыскивается топливо и оно зажигается - происходит рабочий ход поршней 4. Поршни 4 через штоки 13 и конусы 11 или ролики воздействуют на кривые поверхности 23, при этом цилиндры 19 и 20 получают вращательное движение в противоположные стороны. За счет накопленной цилиндрами с кривыми поверхностями кинетической энергии происходит сжатие воздуха в следующей паре рабочих цилиндров - процесс преобразования возвратно-поступательного движения поршней во вращательное движение цилиндров с кривыми поверхностями, а равно первичных валов введен в работу. При работе устройства возникают незначительные боковые усилия, которые гасятся, если это конусы, то конусы выполняют ступенчатыми и ступенью опирают на внутреннюю поверхность внешнего цилиндра 19 с кривой поверхностью, а если ролики - то крутящий момент штока гасят установкой направляющих. Предусмотрена возможность регулирования равномерности опирания и давления штоков 13 на кривые поверхности за счет поворота крестовины с сателлитами вокруг оси, при этом удерживают один из цилиндров с кривой поверхностью, далее корпус с сателлитами фиксируют от дальнейшего поворота на корпусе ДВС. ДВС является реверсивным. Реверсируют его начальным запуском - условно вправо или влево.
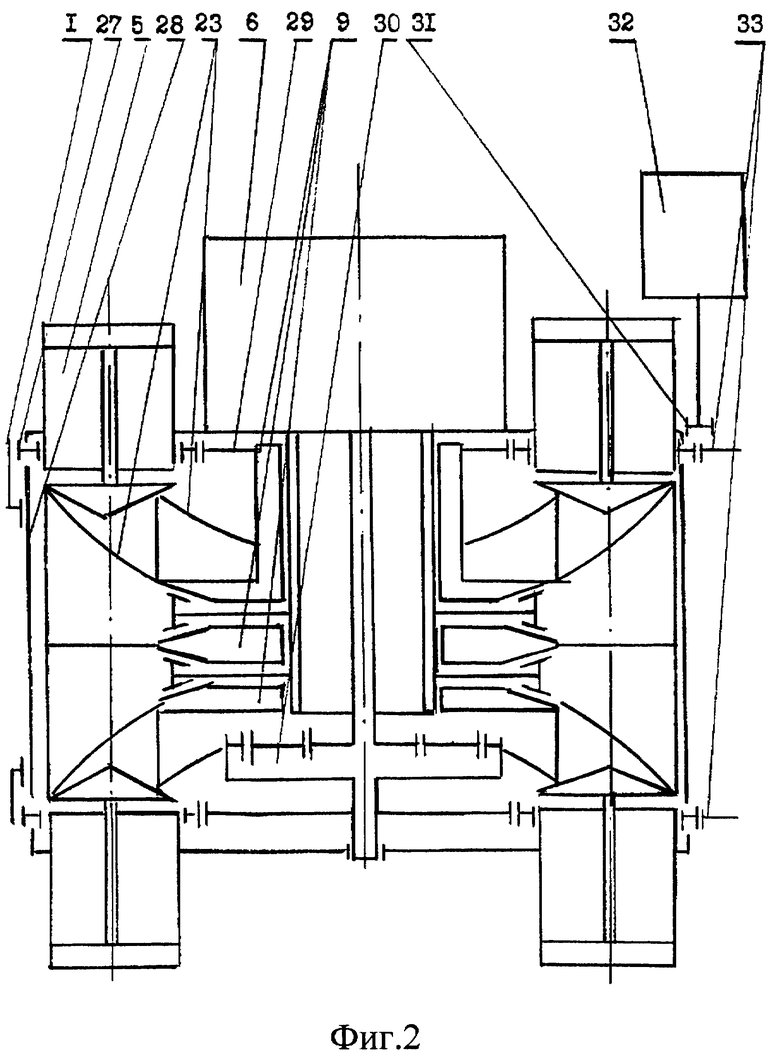
На фиг.2 изображена кинематическая схема электромеханического ДВС с двухсторонним расположением цилиндров, набором шестерен и планетарным редуктором.
Устройство аналогично описанному выше, но установкой двух корпусов с сателлитами достигается установка цилиндров с поршнями и снизу ДВС, за счет чего можно увеличить мощность ДВС вдвое при практически неизменной массе ДВС. Сейчас первый электромеханический ДВС изготавливается и получается следующее. Масса восьмицилиндрового двигателя предполагаемой мощностью шестьсот киловатт - сто пятьдесят килограмм. Цилиндры взяты от автомобиля "Волга".
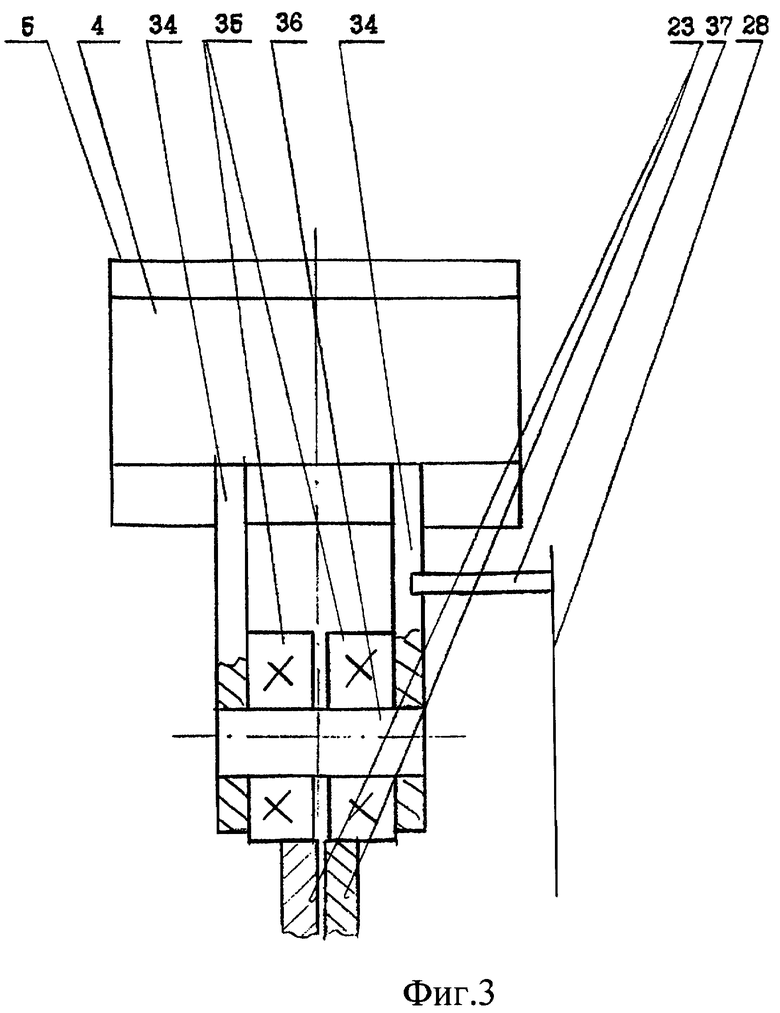
На фиг.3 изображена кинематическая схема преобразования возвратно-поступательного движения поршня во вращательное движение, где вместо конусов, опирающихся на кривые поверхности, на штоке поршня установлены ролики 35.
Заявленные способ и устройство для реализации указанного способа обеспечивают функциональные возможности, описанные следующими пунктами:
1. Вперед редуцирование с бесступенчатым изменением числа оборотов ведомого вала от n=0 до n=n.
2. Вперед мультипликация (увеличение) с бесступенчатым изменением числа оборотов ведомого вала от n=n до n=2n, при этом обеспечивается возможность дистанционного регулирования.
3. Назад редуцирование с бесступенчатым изменением числа оборотов ведомого вала от n=0 до n=n, регулирование дистанционное.
4. Назад мультипликация с бесступенчатым изменением числа оборотов ведомого вала от n=n до n=2n, регулирование дистанционное.
5. Нейтраль.
6. Прямая передача, ведомый и ведущий валы вращаются в одну сторону и соединены, например, шлицевой втулкой.
7. Запуск силового агрегата от бортовой сети или постороннего источника тока.
8. Торможение электрическими машинами (рекуперация).
9. Выработка электроэнергии для стороннего потребителя.
10. Движение от постороннего источника тока.
11. Аварийный съезд с опасного участка дороги за счет бортового источника тока.
12. Запуск силового агрегата от постороннего тягача.
13. Реверсирование двигателя внутреннего сгорания.
Указанные функциональные возможности при осуществлении изобретения достигаются тем, что в устройстве используются двигатель внутреннего сгорания, планетарный редуктор и, по крайней мере, одна универсальная электрическая машина, способная работать как в режиме электрогенератора, так и в режиме электродвигателя. Одна из универсальных электрических машин располагается в главной оси ДВС, а вторая может быть установлена так, что оси вторичного вала и универсальной электрической машины совпадают, или может быть установлена, например, для привода переднего моста, при этом в соединительные провода между универсальными электрическими машинами введен реверсирующий контактор или тиристоры. Соединение универсальной электрической машины с солнечной шестерней, а вторичного вала с коронной шестерней дифференциального механизма через паразитную шестерню, установленную в оси цилиндра, позволяет устройству обеспечивать вышеприведенные функциональные возможности.
При установке электромеханического ДВС на любое транспортное средство достигается бесступенчатое изменение числа оборотов ведомого вала относительно ведущего. Работа двух универсальных электрических машин одновременно на потребление и передачу мощности силового агрегата позволяет получить приемлемые весовые характеристики электромеханического ДВС. Позволяет разгрузить тормоза п.8 двигаться некоторое время от бортовой сети, что незаменимо в аварийных ситуациях п.11, использовать электромеханическую передачу для выработки электроэнергии - передвижная электростанция или источник тока для сварочных работ п.9. Кинематическое соединение ДВС и универсальной электрической машины с использованием четырехзвенного дифференциального или, как разновидность, планетарного механизма позволяет использовать энергию противоэлектродвижущих сил якоря универсальной электрической машины, работающей в режиме электрогенератора, для передачи 50% передаваемой мощности через кинематическую цепь дифференциального или планетарного механизма на ведомый вал. В этой кинематической связи обе универсальные электрические машины работают на передачу кинетической энергии от ведущего вала к ведомому, независимо от того, в каком режиме они работают, в режиме электрогенератора или электродвигателя. На приведенных чертежах хорошо проиллюстрировано несколько вышеприведенных пунктов, описывающих функциональные возможности заявленного изобретения. Например, при работе в соответствии с п.1 универсальная электрическая машина 6 работает в режиме электрогенератора, а универсальная электрическая машина 32 - в режиме электродвигателя, при этом вырабатываемая электроэнергия в универсальной электрической машине 6 потребляется универсальной электрической машиной 32, что приводит к передаче оставшейся половины энергии через соединительные провода.
При соединении одного из цилиндров с криволинейной поверхностью с носителем сателлитов - первое подвижное звено (это может быть крестовина для конических или цилиндрических четырехзвенных дифференциальных механизмов, водило для одной из разновидностей четырехзвенных дифференциальных механизмов, называемых планетарными) якорь универсальной электрической машины соединен со вторым подвижным звеном четырехзвенного дифференциального механизма, а вторичный вал соединен с третьим подвижным звеном четырехзвенного дифференциального механизма. Четырехзвенные дифференциальные механизмы определены в кн.: «Теория механизмов», Артоболевский И.И., издательство «Наука», 1967 г.
При данном кинематическом соединении выполняются следующие функции.
Вперед редуцирование, где вращение от силового агрегата через полый вал якоря универсальной электрической машины 6 передается на первое подвижное звено четырехзвенного дифференциального механизма. Если вторичный вал заторможен, получат удвоенное число оборотов второе подвижное звено четырехзвенного дифференциального механизма и якорь универсальной электрической машины 6. Растормозив вторичный вал, переводим универсальную электрическую машину 6 в режим электрогенератора, а универсальную электрическую машину 32 в режим электродвигателя. Через соединительные провода и реверсивный контактор вырабатываемая электроэнергия преобразуется в универсальной электрической машине 11 в кинетическую энергию вращения вторичного вала. В данном способе кинетическая энергия вращения первичного вала передается на вторичный вал по двум ветвям: за счет противоэлектродвижущей силы якоря универсальной электрической машины 6 от второго подвижного звена через сателлиты получит вращение третье подвижное звено, связанное со вторичным валом. Данное сочетание передачи кинетической энергии: половина через кинематическую цепь, а половина электрическим способом - позволяет получить приемлемые весовые характеристики устройства. При уравнивании числа оборотов ведущего и ведомого валов осевым перемещением вала электрической машины относительно водила с блокировкой этих двух звеньев передача работает как прямой вал, это положение соответствует п.6. Если не давать команду на блокировку, то начинается выполнение п.2 функциональных возможностей. Якорь универсальной электрической машины 6 или вторичный вал начинает вращаться с большим числом оборотов, чем первичный вал.
Запуск силового агрегата п.7 можно произвести двумя способами: а) затормозив вторичный вал подать напряжение на универсальную электрическую машину 6, введя ее в режим электродвигателя, тогда она сразу через кинематическую цепь второе подвижное звено - четвертое подвижное звено провернет первое подвижное звено и первичный вал. После запуска напряжение снимается и устройство готово к работе в прямом направлении; б) на универсальную электрическую машину 6 подается напряжение, и она раскручивается, передавая вращение через кинематическую цепь якорь универсальной электрической машины - второе подвижное звено - четвертое подвижное звено - третье подвижное звено - якорь универсальной электрической машины 32, который получает вращение, равное числу оборотов якоря универсальной электрической машины 6, но в противоположную сторону. Вводим универсальную электрическую машину 32 в режим электрогенератора и вырабатываемую электроэнергию через соединительные провода направляем в универсальную электрическую машину 6. Через кинематическую цепь сила реакции якоря универсальной электрической машины 32, с одной стороны, и универсальная электрическая машина 6 в режиме электродвигателя, с другой стороны, провернут первичный вал, что приведет к запуску силового агрегата, при этом используется накопленная энергия вращения электрических машин. Значит, запуск производится щадящими токами. После запуска напряжение снимается, устройство готово к работе в прямом направлении.
При этом способе кинематического соединения выполняется п.8 - торможение электрогенераторами (рекуперация). В этом случае обе универсальные электрические машины переводятся в режим электрогенераторов и силой реакции тормозят силовой агрегат, а вырабатываемая электроэнергия может быть использована для обогрева салона, накопления в аккумуляторе или может быть направлена в электролизер. Устройство также может работать в режиме электростанции.
Может быть произведен запуск силового агрегата от постороннего тягача п.12 при следующем способе кинематического соединения. Вторичный вал и якорь универсальной электрической машины 32 раскручивается от постороннего тягача, и через заторможенное первое подвижное звено силового агрегата через сателлиты получат вращение второе подвижное звено и якорь универсальной электрической машины 6, но в противоположную сторону. При достаточном разгоне универсальная электрическая машина 32 вводится в режим электрогенератора, по соединительным проводам напряжение подается в универсальную электрическую машину 6, которая вводится в режим электродвигателя, который тормозится контротоком, что приводит к энергичному провороту первичного вала и запуску силового агрегата.
Электромеханическая передача может быть введена в положение нейтраль при разъединении первичного вала с первым подвижным звеном, а якоря универсальной электрической машины со вторым подвижным звеном.
Если соединить первичный вал со вторым подвижным звеном, а якорь универсальной электрической машины с первым подвижным звеном, то выполняются пп.3 и 4 - назад редуцирование и назад мультипликация. В этом случае первичный вал вращает второе подвижное звено, при заторможенном вторичном вале через сателлиты получат половину числа оборотов первое подвижное звено и якорь универсальной электрической машины 6. Растормозив вторичный вал и введя универсальную электрическую машину 6 в режим электрогенератора, а универсальную электрическую машину 32 в режим электродвигателя, получим обратное вращение вторичного вала. Если не давать команду на блокировку, то передача начнет работать в режиме мультипликатора.
При разъединении первичного вала с четырехзвенным дифференциальным механизмом выполняются пп.9 и 10. Обе универсальные электрические машины вводятся в режим электродвигателей и приводят вторичный вал - универсальная электрическая машина 32 прямо, а универсальная электрическая машина 6 через кинематическую цепь дифференциального механизма, сателлиты при этом выполняют роль замка. При использовании как разновидности четырехзвенного дифференциального механизма планетарного механизма можно использовать электромеханическую передачу в качестве обычного редуктора, для этого нужно первичный вал соединить с коронной шестерней, водило затормозить, а обе универсальные электрические машины отключить. Таким образом, изложенные сведения показывают, что при использовании заявляемой группы изобретений выполнена следующая совокупность условий. Изобретения при их осуществлении предназначены для использования в промышленности, а именно в самоходных транспортных средствах всех назначений. Для заявляемой группы изобретений в том виде, как она изложена в независимых пунктах формулы изобретения, подтверждена возможность его осуществления с помощью вышеописанных в заявке или известных до даты приоритета средств и методов.
Изобретение относится к области машиностроения, а именно к силовым агрегатам, в основе которых лежит поршневой двигатель внутреннего сгорания. Технический результат заключается в преобразовании возвратно-поступательного движения поршней во вращательное движение первичных валов без боковых усилий при бесступенчатом регулировании частоты вращения вторичного вала методом сочленения двигателя внутреннего сгорания с электромеханической передачей. Изобретение осуществляется в двигателе внутреннего сгорания, имеющем в своем составе корпус с цилиндрами, в каждом из которых поршни со штоками совершают возвратно-поступательное движение, преобразуемое во вращательное движение вала посредством воздействия штоков на две кривые поверхности, выполненные в виде синусоид на торцах двух цилиндров разного диаметра. При этом двигатель обеспечивается средствами для гашения вращающего момента штока и для отключения штоков поршней от кривых поверхностей при ненадобности. С одной из синусоид связано водило планетарного редуктора, сателлиты которого связаны с коронной и солнечной шестернями. Солнечная шестерня в свою очередь связана с якорем или ротором универсальной электрической машины, установленной на корпусе ДВС в его главной оси. При этом вращение цилиндров с кривыми поверхностями может осуществляться от возвратно-поступательного движения поршней при сгорании топлива при всех отключенных поршнях только от электроэнергии и комбинировано от работы поршней и электроэнергии. 2 н. и 18 з.п. ф-лы, 3 ил.