Изобретение относится к подъемно-транспортному оборудованию, а именно к устройствам автоматической защиты крана с телескопической стрелой от опрокидывания и перегрузок - ограничителям грузоподъемности (ОГ).
Для безопасной эксплуатации краны оснащаются устройствами автоматической защиты.
1. Известен способ, положенный в основу работы устройств защиты кранов и заключающийся в сравнении сигналов силоизмерителя в штоке толкателя стрелы с их допустимыми значениями, равными приведенным к звену силоизмерения значениям грузовых характеристик и заданными программно. Способ традиционно используется в мировой практике устройств защиты в том числе и микропроцессорных |1|, |3|, которые отличаются между собой отдельными техническими решениями. Устройства содержат: датчики угла наклона и длины стрелы, силоизмеритель штока толкателя стрелы, программатор допустимых нагрузок, вычислитель вылета и длины стрелы, компаратор.
Недостатки известных программных устройств защиты проистекают от способа, положенного в основу их работы, и связаны с сравнением двух нелинейноизменяющихся по величине функций вылета и длины стрелы сигналов силоизмерителя и допустимых нагрузок. При равенстве сигналов срабатывает защита и выключает привода на скорости, что приводит к дополнительным динамическим нагрузкам, снижающим устойчивость крана к опрокидыванию. Поэтому в зоне предельных нагрузок следует снижать скорость привода до нуля при срабатывании защиты.
Однако срабатывание защиты происходит при различных по величине сигналах нагрузки крана, в связи с чем информация о нижней границе задаваемой опасной работы крана не определяется однозначно. Поэтому, например, в отечественных устройствах защиты типа ОНК-140 для индикации зон нагрузок используются три лампочки с цветными светофильтрами. Так, включение лампочки с зеленым светофильтром «НОРМА» указывает, что кран работает с нагрузкой, безопасной для работы, включение лампочки желтого свечения, сопровождаемое преривистым звуковым сигналом, свидетельствует, что кран работает в зоне превосходящей 90% нагрузки крана, а включение лампочки красного свечения «СТОП», сопровождаемое прерывистым звуковым сигналом, свидетельствует, что нагрузка крана превышает 100%, а при 110% происходит автоматическое отключение соответствующего привода. Очевидно, что с целью снижения влияния так называемого «человеческого фактора» на безопасность работы крана в зоне опасных нагрузок необходимо использовать систему автоматического замедления скорости привода до нуля по достижении предельной нагрузки, однако, информация «трех лампочек» делает решение этой задачи затруднительной без внесения изменений в сам источник информации.
2. Известно также устройство защиты крана с автоматическим снижением скорости опускания стрелы с грузом |2|, состоящее из программного ограничителя грузоподъемности (ОГ), потенциометра со скользящим контактом, вращаемым моторредуктором питаемым напряжением равным разности сигналов силоизмерителя и программатора допустимых нагрузок с выходов ОГ и электрически управляемым дросселем, установленным на ответвлении напорного трубопровода насоса, благодаря чему происходит перераспределение потоков жидкости, поступающей гидроцилиндр привода и сливаемой через дроссель в бак подпитки насоса. По мере опускания стрелы с грузом уменьшается напряжение питания моторредуктора и скорость перемещения скользящего контакта потенциометра питающего дроссель и увеличиваются просвет дросселя и поток сливаемой через него в бак жидкости, что приводит к снижению скорости опускания стрелы с грузом до полной остановки привода по достижении равенства сигналов силоизмерителя и допустимого груза. Недостаток устройства вызван способом работы программных ОГ.
3. Известен способ проверки работы программных устройств защиты кранов с телескопической стрелой, заключающийся в контроле наличия обрыва в цепи питания датчиков, отклонения значений напряжений питания устройства защиты и погрешности работы аналого-цифрового преобразователя ОГ [4], что недостаточно для заключения о точности его работы в целом. Итак, рассмотренные устройства не отвечают требованиям надежности и информативности, которые связаны с неадекватностью цели - защиты по опрокидывающему моменту от способа ее реализации - по допустимому грузу. Суть которого в том, что линейновозрастающему с увеличением вылета опрокидывающему моменту ставится в соответствие гиперболически убывающий при этом допустимый груз, приведенный к штоку. Названные противоречия исключены в устройствах защиты на основе способов полунатурного математического моделирования, отличающихся от известных адаптивностью к моментным и другим нагрузкам.
Цель изобретения - создание нового способа и на его основе разработка узла преобразования информационных сигналов, применение которого в устройствах программной защиты кранов с телескопической стрелой позволяет повысить надежность его защиты и упрощает отработку сигналов автоматического управления скоростью привода крана. Суть предлагаемого способа в том, что для повышения надежности защиты кранов известными программными устройствами применены:
1. Способ автоматической защиты крана с телескопической стрелой от опрокидывания и перегрузок, согласно которому используются датчики: угла наклона и длины стрелы, силоизмеритель штока ее толкателя, при котором значения нелинейноизменяющихся в функции вылета и длины стрелы сигналы силоизмерителя штокеа и их допустимые значения, определяемые грузовыми характеристиками, сравниваются между собой и при достижении их равенства автоматически отключают привода на скорости или автоматически замедляют скорость опускания стрелы по отношению к установленной машинистом с увеличением опрокидывающего момента, отличающийся тем, что для повышения надежности защиты и расширения функциональных характеристик устройств защиты крана в качестве информационных используются нормированные относительно допустимых значения текущих нагрузок, в результате переменные в поле грузовых характеристик величины допустимых нагрузок приводятся к постоянной величине, равной единице, определяющей диапазон (шкалу) изменения нагрузки крана, равной отношению текущей нагрузки к ее допустимому значению, а для увеличения чувствительности (расширения шкалы нагрузок) сигнал помножается на постоянный коэффициент
2. Способ по п.1, отличающийся тем, что при движениях стрелы без груза точность работы устройства защиты в совокупности с датчиками проверяют визуально по индикаторам прибора или автоматически.
3. Способ по п.1, отличающийся тем, что обеспечивает постоянную во всем поле грузовых характеристик зону опасной работы крана, равную разности постоянных величин - допустимой нагрузки и ширины, установленной «зоны нечувствительности», при превышении нагрузкой этой зоны из разности напряжений текущей нагрузки и «зоны нечувствительности» формируется сигнал замедления скорости привода до нуля по достижении нагрузкой допустимого значения.
4. Структурная схема устройства защиты крана от опрокидывания и перегрузок с управлением скоростями приводов, реализующего способ по п.1, приведена на фиг.1. Устройство содержит: силоизмеритель штока толкателя 1, датчики: длины стрелы 2 и угла ее наклона 3, вычислитель вылета 4, выходами связанный с входами программатора допустимых нагрузок 8 и индикатора вылета 5, а входами подключенный к выходам 2 и 3, а входом 11 с переключателем сменного оборудования, а также компаратор 7, выходом 12 связанный с схемой управления приводами крана, а входом 9 с напряжением допустимой нагрузки, отличающееся тем, что в схему известного устройства защиты дополнительно введен узел преобразования информационных сигналов 13, содержащий последовательно включенные: делитель напряжений 14, входами соединенный с выходами, 1 и 8, а выходом с входом усилителя 15, выходом связанного с первыми входами компаратора 7 и индикатора нагрузки 6 и последовательно соединенными входами: усилителя с «зоной на вторые нечувствительности» 16, преобразователя сигнала управления 17, при этом входы 7, 16, 17 - соответственно 9, 19 и 18 подаются постоянные напряжения, как-то: допустимой нагрузки, ширины «зоны нечувствительности», амплитуды импульса управления, в зависимости от характеристик управления регулятора привода используются сигналы на выходах 21 или 27, графики характеристик вход-выход управляющих сигналов приведены на фиг.1.
5. Устройство по п.4 преобразователь сигнала управления скоростью привода, содержащий дифференциатор 22, ивертор 23, триггер 24, ключ 25 и сумматор 26, реализующее способ по п.3, отличающееся тем, что вход 21 дифференциатора связан с вычитающим входом сумматора 21, а выходом соединен с входами инвертора 23 и триггера 24, обнуляющим входом соединенного с выходом инвертора 23, а выходом с управляющим входом 18 ключа 25, через который на вход сумматора 26 поступает напряжение, равное амплитуде импульса управляющего сигнала.
Принцип работы устройства узла преобразования информационных сигналов
При перемещении стрелы крана с грузом выходной сигнал силоизмерителя штока 1 поступает на вход делителя 14 и делится на сигнал допустимой нагрузки, отрабатываемый программатором допустимых нагрузок 8, управляемого кодами выходных сигналов датчиков 2 и 3, далее выходной сигнал 14, изменяющийся в пределах 0-1, усилителивается усилителем 15 с коэффициентом усиления, например, равным 10, при этом диапазон напряжения на входе 20 усилителя 16 с «зоной нечувствительности» составляет 0-10 вольт, соответственно изменяются и напряжения на входах индикатора нагрузки 6 и первом входе компаратора 7, на второй вход которого подается допустимое напряжение, равное 10 вольтам. Поэтому установка 90% «зоны нечувствительности» осуществляется напряжением 9 В на входе 19 усилителя 16, часть входного сигнала U, равная разности U-9>0 и изменяющаяся в интервале 0-1, и усиленная 16 появится на его выходе 21 при выполнении условия U>9. Крутизна нарастающего сигнал управления приводом на выходе 21 определяется коэффициентом усиления 16. Он используется в гидроприводах с насосами переменной производительности. Для приводов с регулирующим дросселем сигнал управления должен быть убывающим. На фиг.2 приведена структурная схема преобразования сигнала управления из нарастающего в убывающий. Устройство работает следующим образом: момент появления сигнала на выходе 21 фиксируется дифференциатором 22, который импульсом фронта переводит триггер 24 в единичное состояние, последний своим выходным сигналом открывает ключ 25, через который на вход сумматора 26 подается постоянное напряжение с входа 18 ключа 25. равное амплитуде импульса, одновременно на вычитающий вход сумматора 26 через вход 21 подается возрастающее напряжение, поэтому напряжение на выходе 27 сумматора 26, равное разности постоянного и нарастающего напряжений убывает и при достижении напряжения на выходе 21 амплитудного значения импульсом спада дифференциатора триггер переводится в нулевое положение при этом сигнал управления на выходе 27 равен нолю и одновременно срабатывает компаратор, дублирующий выключение.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Р.Е. Кошелюк, Ю.Е. Кушнир, Д.М. Маш Микропроцессорная аппаратура защиты кранов с телескопической стрелой. Строительные и дорожные машины. 1992, №2.
2. Патент 1.531.864 (Англия). Опубл. 08.11.78.
3. АС 759447 (СССР) - Ограничитель грузоподъемности крана с телескопической стрелой. Авторы: Маш Д.М., Щедровицкий С.С.
4. Система защиты крана с телескопической стрелой TG 350 MG 350 (Япония).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ МОМЕНТНОЙ ЗАЩИТЫ КРАНА С ТЕЛЕСКОПИЧЕСКОЙ СТРЕЛОЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2245293C2 |
| СПОСОБ МОМЕНТНОЙ ЗАЩИТЫ СТРЕЛОВОГО КРАНА ПО СИГНАЛАМ ДАТЧИКОВ ОПОР И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2245294C2 |
| Устройство управления приводами механизмов стрелового крана | 1981 |
|
SU979266A1 |
| Ограничитель грузоподъемности для кранов с телескопической стрелой | 1975 |
|
SU565007A1 |
| Ограничитель грузоподъемности для кранов с телескопической стрелой | 1977 |
|
SU737353A2 |
| Предохранительное устройство стрелового крана | 1982 |
|
SU1101402A1 |
| Ограничитель грузоподъемности для кранов с телескопической стрелой | 1977 |
|
SU737352A2 |
| Ограничитель грузоподъемности для кранов с телескопической стрелой | 1977 |
|
SU732200A1 |
| СПОСОБ ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2271985C2 |
| ОГРАНИЧИТЕЛЬ НАГРУЗКИ СТРЕЛОВОГО КРАНА | 2009 |
|
RU2391285C1 |

Изобретение относится к подъемно-транспортному оборудованию, а именно к устройствам защиты кранов с телескопической стрелой от опрокидывания и перегрузок. В качестве информационных и сравниваемых используются нормированные относительно допустимых значения. В результате переменные в поле грузовых характеристик величины допустимых нагрузок приводятся к постоянной величине, равной единице, определяющей диапазон (шкалу) изменения степени загрузки крана, для расширения которых они помножаются на постоянный коэффициент. Способ позволяет задать постоянную в поле грузовых характеристик зону опасной работы крана, внутри которой включается устройство автоматического замедления скорости привода до нуля по достижении загрузкой постоянной величины. Достигается повышение надежности и безопасности устройства. 2 н. и 3 з.п. ф-лы, 2 ил.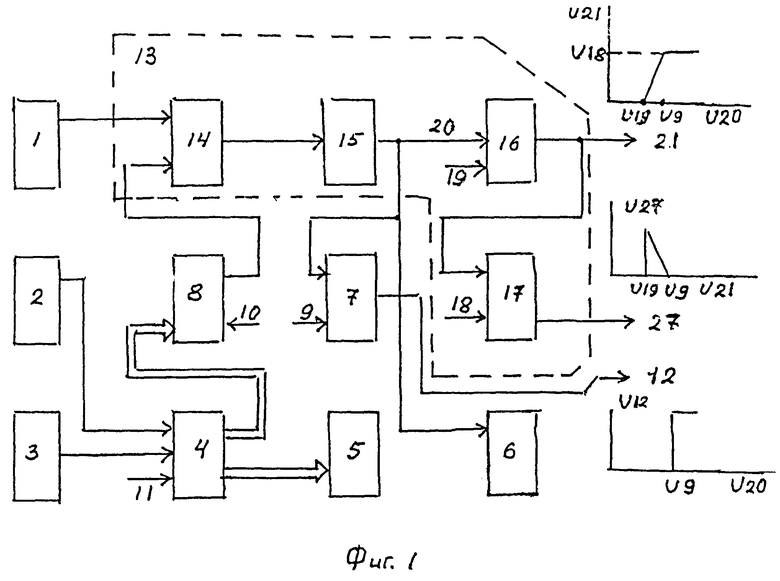
1. Способ автоматической защиты крана с телескопической стрелой от опрокидывания и перегрузок с управлением скоростями приводов, согласно которому используются датчики: угла наклона стрелы, длины стрелы, силоизмеритель в штоке толкателя стрелы, нелинейно изменяющиеся в функции вылета и длины стрелы сигналы: усилия в штоке и их допустимые значения, определяемые грузовыми характеристиками, сравниваются между собой и при достижении их равенства автоматически отключают привода на скорости или автоматически замедляют скорость опускания стрелы по отношению к установленной машинистом с увеличением опрокидывающего момента,
отличающийся тем, что для повышения надежности защиты крана в качестве информационных и сравниваемых используются нормированные относительно допустимых значения нагрузок, в результате переменные в поле грузовых характеристик величины допустимых нагрузок приводятся к постоянной величине, равной единице, определяющей диапазон (шкалу) изменения степени загрузки крана, равной отношению текущей нагрузки к ее допустимому значению.
2. Способ по п.1, отличающийся тем, что при движениях стрелы без груза точность работы устройства защиты в совокупности с датчиками проверяют визуально по индикаторам прибора или автоматически.
3. Способ по п.1, отличающийся тем, что обеспечивает постоянную во всем поле грузовых характеристик заданную зону опасной работы крана, равную разности постоянных величин - допустимой нагрузки и ширине установленной «зоны нечувствительности» усилителя, внутри которой из сигнала нагрузки формируется сигнал замедления скоростей приводов до нуля и ослабляется раскачивание груза.
4. Устройство защиты крана с телескопической стрелой от опрокидывания и перегрузок с управлением скоростями приводов, содержащее: датчики длины стрелы, угла наклона стрелы, вычислитель вылета, программатор допустимых нагрузок, силоизмеритель в штоке толкателя стрелы, индикаторы: вылета и загрузки крана, компаратор, отличающееся тем, что для реализации способа по п.1 в устройство дополнительно введен узел преобразования информационных сигналов, состоящий из последовательно включенных: делителя напряжений, усилителя, усилителя с «зоной нечувствительности» и преобразователя сигнала управления приводом крана, при этом первым и вторым входами делитель напряжения соединен соответственно с выходами силоизмерителя в штоке толкателя стрелы и программатора допустимых нагрузок, а выходом - с входом усилителя, выходом соединенного с первыми входами компаратора, усилителя с «зоной нечувствительности», преобразователя сигнала управления приводом, на вторые входы которых подаются постоянные напряжения, соответствующие границе «зоны нечувствительности», допустимой нагрузке и амплитуде импульса управления, причем регулирование скорости осуществляется входными сигналами: усилителя с «зоной нечувствительности» для привода с электрически управляемым гидродросселем или преобразователя сигнала управления, в случае привода с насосом переменной производительности.
5. Устройство по п.4, отличающееся тем, что содержит преобразователь сигнала управления, дифференциатор, инвертор, триггер, ключ и сумматор, дифференциатор входом соединен с вычитающим входом сумматора, а выходом - с входами инвертора и триггера, обнуляющим входом связанного с выходом инвертора, а выходом с управляющим входом ключа, через который на вход сумматора поступает постоянное напряжение, равное амплитуде управляющего импульса.
| ОГРАНИЧИТЕЛЬ ГРУЗОПОДЪЕМНОСТИ СТРЕЛОВОГО КРАНА | 1999 |
|
RU2179146C2 |
| ОГРАНИЧИТЕЛЬ ГРУЗОПОДЪЕМНОСТИ СТРЕЛОВОГО КРАНА | 1992 |
|
RU2045468C1 |
| ОГРАНИЧИТЕЛЬ ГРУЗОПОДЪЕМНОСТИ СТРЕЛОВОГО КРАНА | 1991 |
|
RU2011632C1 |
| Способ контроля качества полупроводниковых приборов | 1969 |
|
SU285710A1 |

