Изобретение относится к радиолокации, а именно к радиолокационным системам наблюдения за поверхностью на базе бортовой импульсно-доплеровской РЛС маловысотного полета, работающей в режиме "доплеровского обужения" диаграммы направленности антенны (ДНА) с электронным сканированием луча.
Получение трехмерных радиолокационных изображений (РЛИ) поверхности (и объектов на поверхности) с помощью бортовой РЛС необходимо для выполнения полетов на малой высоте, например, в условиях гористой местности при отсутствии оптической видимости, когда высота играет существенное значение для получения правильного пространственного изображения поверхности и обхода препятствий по линии полета. Известен способ обзора поверхности и пространства путем построчного сканирования зоны обзора узким лучом РЛС при его последовательном перемещении на ширину ДНА с помощью электронного управления лучом в системах с ФАР (фазированной антенной решеткой), а также в системах с механической перестройкой антенны, который может быть применен при маловысотном полете (Финкельштейн М.И. Основы радиолокации: Учебник для вузов. М.: Радио и связь, 1983. - 536 с., с.436-439; Пат. 2211459 РФ. Способ обзора пространства и сопровождения объектов поверхности при маловысотном полете / Г.Н. Колодько, В.И. Мойбенко, В.К. Клочко (РФ). - Заявка №2001107438. Приоритет 22.03.2001; Самарин О.Ф., Курилкин В.В. Концепция выполнения маловысотного полета летательных аппаратов с помощью автономных БРЛС // Радиотехника, 1998, №4. - С.50-54). При этом формируется плоское РЛИ в координатах азимут - угол места в срезах (элементах разрешения) дальности. Однако разрешающая способность по угловым координатам при таком способе ограничена шириной ДНА и не позволяет получить детальное изображение поверхности. Для повышения разрешающей способности в импульсно-доплеровских РЛС применяется режим синтезирования апертуры антенны (РСА) с помощью узкополосной доплеровской фильтрации отраженного сигнала в каждом элементе разрешения по дальности (Финкельштейн М.И. Основы радиолокации: Учебник для вузов. М: Радио и связь, 1983. - 536 с., с.436-439; Радиолокационные станции с цифровым синтезированием апертуры антенны / А.Н. Антипов, В.Т. Горяинов, А.Н. Кулин и др. Под ред. В.Т. Горяинова. - М.: Радио и связь, 1988. - 304 с.). Это позволяет получать матрицу РЛ-изображения достаточно большого участка поверхности, накрываемой ДНА, в координатах наклонная дальность - доплеровская частота, которая напоминает плоское оптическое изображение. Однако такой режим используется, в основном, при полете на большой высоте, когда высотой поверхности можно пренебречь, а в условиях маловысотного полета режим "доплеровского обужения" дает искаженное изображение рельефной поверхности и не определяет ее высоты.
Наиболее близким по технической сущности является способ получения двумерного (плоского) РЛИ поверхности в режиме узкополосной доплеровской фильтрации (Кондратенков Г.С., Фролов А.Ю. Радиовидение в передней зоне обзора бортовой радиолокационной станции с синтезированной апертурой антенны / Радиотехника, 2004, №1. - С.47-49). Данный способ заключается в следующем.
1. Приемное устройство РЛС включает в себя М стробов дальности (ключей) S1, S2, ..., SM, которые последовательно открываются и пропускают отраженный сигнал u(t), t∈[t0,t1], на одном из М промежутков времени [t0, t0+I·Δt],  Δt=(t1-t0)/M, соответствующих М промежуткам дальности [R0, R0+I·ΔR],
Δt=(t1-t0)/M, соответствующих М промежуткам дальности [R0, R0+I·ΔR],  ΔR=(R1-R0)/M, в зоне обзора [R0,R1], где ΔR - размер элемента разрешения по дальности.
ΔR=(R1-R0)/M, в зоне обзора [R0,R1], где ΔR - размер элемента разрешения по дальности.
2. Сигнал u(t), t∈[t0, t0+I·Δt], при данном положении луча по азимуту и углу места с выхода каждого I-го строба дальности (I=1, 2, ..., М), подается на алгоритм обужения ДНА, который включает в себя N узкополосных J-х фильтров с разделенными полосами частот [f0, f0+J·Δf],  Δf=(f1-f0)/N, на промежутке [f0,f1], где Δf - ширина полосы пропускания фильтра.
Δf=(f1-f0)/N, на промежутке [f0,f1], где Δf - ширина полосы пропускания фильтра.
3. В соответствии с доплеровским эффектом изменение частоты отраженного сигнала пропорционально изменению скорости движения отраженного луча РЛС в зависимости от угла α отклонения луча от вектора скорости движения объекта-носителя РЛС, где угол α связан нелинейной зависимостью с азимутом ϕ. Полосе частот [f0,f1] ставится в соответствие угловой промежуток по азимуту [ϕ0, ϕ1], длина которого Δϕ=ϕ1-ϕ0 определяется шириной ДНА. Приближенно (из-за нелинейной зависимости α и ϕ) можно считать, что при наличии N фильтров промежуток [ϕ0, ϕ1] разбивается на N примерно одинаковых частей, и разрешение по азимуту составляет Δϕ/N, т.е. увеличивается в N раз.
4. В каждом J-м фильтре выделяется амплитуда A(I,J) сигнала, которая соответствует спектру J-й полосы пропускания в I-м стробе дальности. Таким образом, на множестве элементов разрешения по дальности (по I-м строкам) и частоте (по J-м столбцам) в зоне данного направления луча формируется матрица радиолокационного изображения А в виде совокупности амплитуд A(I,J),  которая далее передается на алгоритмы индикации для отображения на экране индикатора пилота.
которая далее передается на алгоритмы индикации для отображения на экране индикатора пилота.
Однако такой способ обладает следующими недостатками.
1. Двумерное (плоское) изображение А не дает информации о высоте поверхности, что не позволяет применять этот способ при маловысотном полете.
2. Изображение А соответствует лишь одному положению узкого луча РЛС и не захватывает всей зоны обзора при маловысотном полете.
3. При попытке сканирования лучом РЛС всей зоны обзора по мере изменения угла места луча меняется соответствие между осью частот и азимутальной осью, что приводит к искажению изображения в целом.
Технический результат направлен на получение трехмерного изображения поверхности при маловысотном полете с повышенным пространственным разрешением в зоне обзора.
Технический результат предлагаемого технического решения достигается тем, что способ получения трехмерного изображения поверхности в зоне обзора бортовой РЛС маловысотного полета с электронным сканированием луча и доплеровской селекцией по частоте заключается в создании режима построчного обзора контролируемого участка пространства в сочетании с узкополосной доплеровской фильтрацией принятых сигналов, позволяющей рассечь пространственные элементы разрешения антенны на мелкие части (доплеровские элементы разрешения - ДЭР), и формировании матрицы трехмерного изображения поверхности в виде совокупности амплитуд отраженных сигналов, зафиксированных в ДЭР, при этом за счет быстрого электронного переключения луча РЛС смещают луч по азимуту и углу места построчно на ширину диаграммы направленности антенны в зоне обзора и при каждом положении луча по азимуту и углу места измеряют амплитуду сигнала на выходе J-го фильтра доплеровских частот в I-м элементе разрешения дальности, тем самым получают двумерное изображение поверхности в пределах зоны обзора при каждом положении луча РЛС в виде совокупности амплитуд, отличающийся тем, что для каждой измеренной амплитуды, превышающей порог обнаружения (соответствующей отражению от поверхности), выбирают i, j, k-e элементы дискретизации прямоугольной сетки xi, yj, zk, сферические координаты которых R, ϕ, θ принадлежат области ДЭР, путем проверки системы неравенств:

где RI, ϕJ, θJ - известные сферические координаты центра ДЭР, RI - дальность, ϕJ - азимут, θJ - угол места, ΔR - разрешение по дальности, Δϕ, Δθ, b - известные для каждого положения луча параметры аппроксимации границ ДЭР по углам, и если i, j, k-e элементы дискретизации принадлежат области ДЭР, то запоминают амплитуду данного ДЭР в матрице амплитуд А, а максимальное значение третьей координаты высоты - в матрице Z, затем повторяют эти операции для всех положений луча и тем самым формируют трехмерное изображение поверхности в зоне обзора РЛС в виде двумерных матриц А и Z.
Способ осуществляется следующим образом.
1. При каждом положении луча по азимуту и углу места сигнал в I-м стробе дальности  подается на вход N доплеровских фильтров, в которых осуществляется селекция по частоте.
подается на вход N доплеровских фильтров, в которых осуществляется селекция по частоте.
2. Амплитуда сигнала A(I,J) на выходе каждого J-го фильтра  запоминается в матрице амплитуд А для I, J-го синтезированного пространственного элемента разрешения.
запоминается в матрице амплитуд А для I, J-го синтезированного пространственного элемента разрешения.
3. Последовательно в процессе формирования матрицы А относительно каждого I, J-го ДЭР, амплитуда которого A(I,J) превышает порог обнаружения (соответствует отражению от поверхности) строится пространственный строб в трехмерной прямоугольной системе координат x, y, z с i, j, k-ми элементами дискретизации, размеры которых на плоскости х, y меньше минимального диаметра проекции ДЭР.
4. Для каждого i, j, k-го элемента дискретизации в стробе проверяется принадлежность его координат xi, yj, zk I, J-му ДЭР путем сопоставления сферических координат R, ϕ, θ элемента xi, yj, zk с границами области D I, J-го ДЭР, установленными заранее в сферической самолетной системе координат с учетом вектора скорости движения объекта-носителя путем проверки выполнения системы неравенств

где RI, ϕJ, θJ - известные сферические координаты центра I, J-го ДЭР, причем азимут ϕJ соответствует J-му фильтру частот; Δϕ, Δθ, b - известные для каждого положения луча параметры аппроксимации ДЭР.
5. Если i, j, k-й элемент дискретизации с координатами центра xi, yj, zk принадлежит области D, то амплитуда A(I,J) запоминается в матрице А, а координата zk запоминаются в матрице Z. Если области D принадлежат несколько элементов дискретизации с одинаковыми координатами xi, yj и различными координатами zk, то в матрице Z запоминается максимальное значение zk.
6. Указанные операции повторяются для всех положений луча, тем самым формируются матрицы А и Z, которые представляют трехмерное изображение поверхности в зоне обзора РЛС.
7. Полученные матрицы А и Z привязываются к текущему дискретному моменту времени tμ (μ=0, 1, 2, ...) и передаются на алгоритмы пространственно-временной обработки и вывода изображения на экран индикатора.
8. Если пространственно-временная обработка не осуществляется, то операции п.4 выполняются в сферической системе координат. В этом случае координатами центра i, j, k-го элемента дискретизации являются Ri, ϕj, θk - дальность, азимут, угол места и сопоставление Ri, ϕj, θk с границами ДЭР проводится без пересчета координат. На алгоритмы индикации выдаются матрицы: А - матрица амплитуд в координатах дальность - азимут и Θ - матрица третьей координаты (угла места).
Предлагаемый способ может применяться как на малой, так и большой высоте. В частном случае высотного полета матрицы Z или Θ не используются, так как высотой поверхности пренебрегают, и на индикацию выдается одна матрица двумерного (плоского) РЛИ А, традиционно получаемая в существующих системах доплеровского обужения.
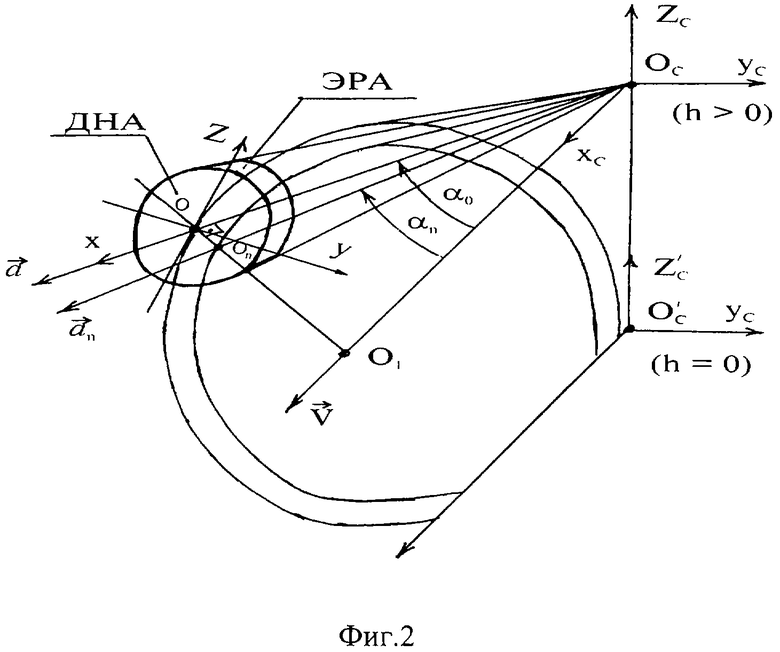
Расчет границ пространственных областей ДЭР сводится к следующему. В текущий момент времени tμ объект-носитель РЛС рассматривается в самолетной системе координат <ОC, хC, yC, zC>. Начало координат - точка ОC совпадает с центром масс самолета, ось ОCxC направлена вперед по строительной оси самолета, ось ОCyC лежит в плоскости левого крыла. Одновременно рассматривается сферическая система координат <Оc, Rc, ϕc, θc>, R - дальность, ϕ - азимут, θ - угол места, положительное направление отсчета ϕ и θ - против часовой стрелки относительно оси ОCхC, начало координат совпадает с точкой ОC. Ось симметрии антенны, совпадающая с вектором а на фиг.1 и фиг.2, занимает ряд фиксированных угловых положений по ϕ и θ (в горизонтальной и вертикальной плоскостях) с помощью электронного управления лучом, угловые координаты ДНА составляют ϕ±Δϕ/2 и θ±Δθ/2, где Δϕ и Δθ - размеры элементов разрешения (ЭР) по углам (ширина ДНА по азимуту и углу места). При данных ϕ и θ формируются ЭР по дальности R размера ΔR: R±ΔR/2.
Элемент разрешения антенны (ЭР) представляет пространственную фигуру, образованную пересечением конической поверхности ДНА с вершиной в точке Оc, угловыми координатами (ϕо, θо) оси симметрии (вектора а на фиг.2) и двух сферических поверхностей постоянного уровня дальности с центром в точке Ос. Центром данного ЭР является точка О с сферическими координатами (Ro, ϕо, θo), положительный отсчет ϕ и θ осуществляется против часовой стрелки относительно оси Осхс.
Наличие доплеровских узкополосных фильтров с геометрической точки зрения означает дополнительное рассечение поверхности ЭР рядом конических поверхностей постоянного уровня скорости доплеровской частоты с вершиной в точке Ос и осью симметрии, совпадающей с вектором скорости ν движения объекта-носителя РЛС, направленного по оси Осхс. В результате образуются более мелкие элементы разрешения в виде сложных пространственных областей ДЭР (доплеровские элементы разрешения) разных размеров и с различной ориентацией в пространстве.
Положение конкретного ДЭР определяется углом α, который соответствует определенному номеру узкополосного доплеровского фильтра частот. Разрешение по углу α составляет величину Δα, которая связана нелинейной зависимостью с разрешением по частоте Δf. При фиксированной скорости ν движения и равномерном разбиении полосы частот (Δf=const) шкала α∈[0, π/2] разбивается на неравномерные промежутки αn±Δαn/2.
Задача состоит в определении сферических координат границ ДЭР, что необходимо для формирования матриц трехмерного РЛ-изображения поверхности.
Принципиальное решение задачи может быть получено следующим образом. Обозначим αn - угол между осью Осхс (вектором ν) и образующей ОсОn (вектором аn) n-го конуса постоянного угла αn - фиг.2.
Связь αn с угловыми координатами (ϕn, θn) вектора аn устанавливается по формуле

где cosαn находится через скалярное произведение орта ic оси Осхс и орта аn оси ОсОn. Действительно, координаты вектора аn, имеющие в местной прямоугольной системе <On, хn, yn, zn> n-го ДЭР канонический вид (1,0,0), в самолетной системе <Ос, хс, yc, zc> находятся по формуле связи старых и новых координат при преобразовании типа поворота на угол ϕn вокруг оси Осzc и затем поворота на угол θn вокруг оси Осy′c:

что равносильно повороту ic=(1,0,0) на угол ϕn вокруг оси Oczc в плоскости Ос, хс, yс и затем повороту на угол θn вокруг оси Осу′с в плоскости Ocx′czc. В результате получается вектор

причем |аn|=1. Тогда cosαn=ic·an=cosϕn·cosθn.
Использование формулы (1) при определении координат n-го ДЭР данного ЭР сводится к численному решению нелинейного уравнения для каждого значения доплеровского угла α∈[αn-Δαn/2, αn+Δαn/2], где αn - доплеровский угол, соответствующий доплеровской частоте fn и центру n-го ДЭР, при ограничениях

Смещение (приращение) частоты Δfn за счет смещения (приращения) угла отклонения Δαn находится по формуле (при условии, что Δαn мало):

где ν - путевая скорость (объекта-носителя РЛС), λ - длина волны излучения (например, Кондратенков Г.С, Фролов А.Ю. Радиовидение. Радиолокационные системы дистанционного зондирования Земли. Учебное пособие для вузов / Под ред. Г.С. Кондратенкова. - М.: Радиотехника, 2005, с.38).
Для работы в реальном масштабе времени требуется более простое описание ДЭР в виде линейных зависимостей. В работе (Клочко В.К. Методика определения координат доплеровских элементов разрешения бортовой радиолокационной системы при получении трехмерных изображений поверхности // Автометрия, 2002, №6. - С.12-20) предлагается методика определения таких зависимостей, основанная на аппроксимации конических и сферических поверхностей цилиндрическими и плоскими, допустимая в пределах ЭР. При этом получается линейная модель ДЭР и следующий алгоритм определения координат границ доплеровского элемента разрешения.
1. Для каждого положения луча РЛС с шириной по азимуту и углу места Δϕ, Δθ определяется доплеровский угол α, соответствующий центру ЭР.
2. Находится диапазон [αmin, αmax] значений доплеровского угла α, соответствующий данному ЭР, где в случае круговой (точечной) ДНА αmin=α-Δϕ/2, αmax=α+Δϕ/2, и устанавливается соответствие

с полосой доплеровских частот так, что каждому J-му угловому промежутку [αJ, αJ+1]⊂[αmin, αmax] доплеровского элемента разрешения D соответствует полоса частот [fJ, fJ+1]⊂[fmin, fmax] доплеровского фильтра.
3. Для каждого J-го ДЭР определяются параметры аппроксимации (ϕJ, ΔϕJ, θJ, ΔθJ, bJ) и задается линейное описание относительно его углового центра (ϕJ, θJ):

Расчеты не зависят от дальности R и выполняются заранее для различных значений (ϕJ,θJ), которые определяются режимом наблюдения РЛС.
4. На множестве I-х элементов разрешения дальности ДЭР принимает окончательный вид

5. Если принять упрощение (удобное, например, для веерной ДНА), что параметры аппроксимации не зависят от J в пределах данного направления: (ϕJ, Δϕ, θJ, Δθ, b), то описание (4) принимает вид

где RI, ϕJ, θJ - известные сферические координаты центра I, J-го ДЭР, причем азимут ϕJ связан с углом места θJ зависимостью cosαJ=cosϕJ·cosθJ, доплеровский угол αJ соответствует частоте fJ J-го фильтра частот:  ν - путевая скорость, λ - длина волны излучения, ΔR - разрешение по дальности, Δϕ, Δθ, b - известные для каждого положения луча параметры аппроксимации границ ДЭР по углам.
ν - путевая скорость, λ - длина волны излучения, ΔR - разрешение по дальности, Δϕ, Δθ, b - известные для каждого положения луча параметры аппроксимации границ ДЭР по углам.
Пересчет ДЭР в прямоугольную систему координат осуществляется следующим образом.
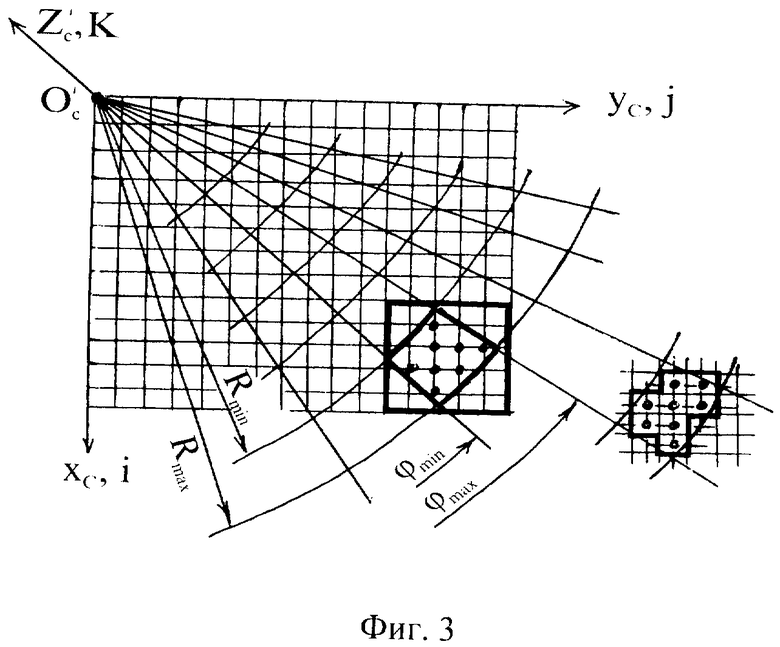
1. Задается прямоугольная сетка i, j, k координат в системе <O′С, xС, yС, zС> на плоскости нулевого уровня высоты (фиг.3) с элементами дискретизации Δх, Δy, Δz, причем размеры Δх и Δy выбираются меньше минимального диаметра проекции ДЭР на плоскость хс, yс.
2. Для каждого ДЭР в соответствии с формулами связи прямоугольных и сферических координат х=R·cosθ·cosϕ, y=R·cosθ·sinϕ, z=R·sinθ+h, где h - высота в точке Ос, устанавливаются диапазоны возможных значений по х, у, z в окрестности данного ДЭР (в прямоугольном стробе - фиг.3) и осуществляется перебор точек (узлов) прямоугольной сетки в указанных диапазонах. Для каждой такой i, j, k-й точки с координатами х=xi, y=yj, z=zk (нумерация i, j, k соответствует прямоугольной системе) вычисляются соответствующие им сферические координаты в самолетной системе: 
Координаты R, ϕ, θ проверяются на принадлежность данному ДЭР путем проверки выполнения системы неравенств (4) или (5).
Если i, j, k-я точка удовлетворяет системе (4) или (5), то в матрице А с элементами A(i,j) запоминается амплитуда данного ДЭР, а в матрице Z с элементами Z(i,j) запоминается наибольшее значение третьей координаты (высоты) относительно нулевого уровня. Таким образом, данный ДЭР описывается семейством прямоугольных ячеек {(i,j)} на плоскости с характеристиками A(i,j), Z(i,j), ∀i,j ∈ ДЭР.
Полученные матрицы трехмерного изображения поверхности A, Z в прямоугольной системе координат, привязанные к текущему дискретному моменту времени tμ, μ=0, 1, 2, ..., передаются на алгоритмы пространственно-временной обработки изображений, предназначенные для повышения качества изображения (устранение смазываний, подавление спекл-шумов: Клочко В.К. Пространственно-временная обработка информации бортовой РЛС при получении трехмерных изображений поверхности // Радиотехника, 2004, №6. - С.3-11) и алгоритмы вывода изображений на экран.
Если алгоритмы пространственно-временной обработки не используются, то отпадает необходимость пересчета в прямоугольную систему координат и алгоритм формирования трехмерного изображения сводится к следующему.
1. Задается сетка i, j, k сферических координат в самолетной системе <Ос, Rc, ϕс, θс> с элементами дискретизации δR, δϕ, δθ, причем размеры δR и δϕ выбираются меньше минимальной проекции ДЭР на плоскость Rc, ϕc.
2. Для каждого ДЭР устанавливаются диапазоны возможных значений по R, ϕ, θ в окрестности данного ДЭР и осуществляется перебор точек (узлов) сферической сетки в указанных диапазонах. Для каждой такой i, j, k-й точки с координатами Ri, ϕj, θk проверяются ее принадлежность данному ДЭР путем проверки выполнения системы неравенств (4) или (5).
Если i, j, k-й узел удовлетворяет системе (4) или (5), то в матрице А запоминается амплитуда данного ДЭР, а в матрице Θ запоминается наибольшее значение третьей координаты (азимута), и данный ДЭР описывается семейством точек (пикселов) {(i, j)} на плоскости с характеристиками A(i,j), Θ(i,j), ∀i,j ∈ ДЭР.
Предложенный способ получения трехмерных изображений использует доплеровскую информацию для повышения разрешения не только по азимуту ϕ, но и по углу места θ, что позволяет более точно изображать поверхность, а также повышать в несколько раз точность определения ее высоты (при определенном взаимном положении векторов ν и а). Возможность наблюдать изображение поверхности (и объектов на поверхности) с дополнительной информацией о высоте (например, в градациях цветности или в изометрии) повышает безопасность маловысотных полетов и дает возможность более точно определять положение объектов на поверхности в условиях отсутствия оптической видимости.
Изобретение относится к радиолокации, а именно к радиолокационным системам наблюдения за поверхностью на базе бортовой импульсно-доплеровской РЛС маловысотного полета. Техническим результатом является получение трехмерного изображения поверхности с повышенным пространственным разрешением в зоне обзора. Способ получения трехмерного изображения поверхности в зоне обзора бортовой РЛС маловысотного полета заключается в создании режима построчного обзора контролируемого участка пространства в сочетании с узкополосной доплеровской фильтрацией принятых сигналов, позволяющей рассечь пространственные элементы разрешения ДНА на мелкие части (доплеровские элементы разрешения - ДЭР), и формировании трехмерного изображения поверхности в виде совокупности амплитуд отраженных сигналов, зафиксированных в ДЭР и представленных в виде матрицы амплитуд и матрицы третьей координаты в прямоугольной системе координат. 3 ил.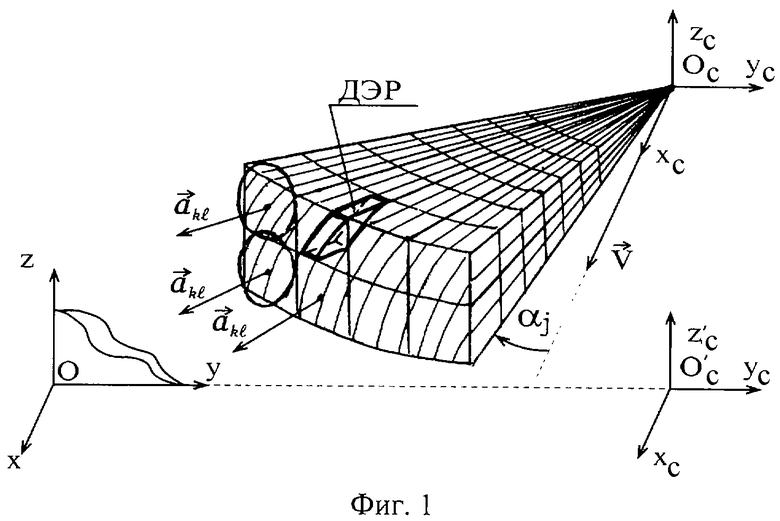
Способ получения трехмерного изображения поверхности в зоне обзора бортовой РЛС маловысотного полета, заключающийся в создании режима построчного обзора контролируемого участка пространства в сочетании с узкополосной доплеровской фильтрацией принятых сигналов, позволяющей рассечь пространственные элементы разрешения антенны на мелкие части (доплеровские элементы разрешения - ДЭР), и формировании матрицы трехмерного изображения поверхности в виде совокупности амплитуд отраженных сигналов, зафиксированных в ДЭР, при этом за счет быстрого электронного переключения луча РЛС смещают луч по азимуту и углу места построчно на ширину диаграммы направленности антенны в зоне обзора и при каждом положении луча по азимуту и углу места измеряют амплитуду сигнала на выходе J-го фильтра доплеровских частот в I-м элементе разрешения дальности, тем самым получают двумерное изображение поверхности в пределах зоны обзора при каждом положении луча РЛС в виде совокупности амплитуд, отличающийся тем, что для каждой измеренной амплитуды, превышающей порог обнаружения (соответствующей отражению от поверхности), выбирают i, j, k-e элементы дискретизации прямоугольной сетки хi, yj, zk, сферические координаты которых R, ϕ, θ принадлежат области ДЭР, путем проверки системы неравенств:

где RI, ϕJ, θJ - известные сферические координаты центра ДЭР, RI - дальность, ϕJ - азимут, θJ - угол места, ΔR - разрешение по дальности, Δϕ, Δθ, b - известные для каждого положения луча параметры аппроксимации границ ДЭР по углам, и если i, j, k-e элементы дискретизации принадлежат области ДЭР, то запоминают амплитуду данного ДЭР в матрице амплитуд А, а максимальное значение третьей координаты высоты - в матрице Z, затем повторяют эти операции для всех положений луча и тем самым формируют трехмерное изображение поверхности в зоне обзора РЛС в виде двумерных матриц А и Z.
| КОНДРАТЕНКОВ Г.С и др | |||
| Радиовидение в передней зоне обзора бортовой радиолокационной станции с синтезированной апертурой антенны | |||
| - Радиотехника, 2004, №1, с.47-49 | |||
| СПОСОБ НАБЛЮДЕНИЯ ЗА ПОВЕРХНОСТЬЮ И ВОЗДУШНОЙ ОБСТАНОВКОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 2003 |
|
RU2256193C1 |
| СПОСОБ НАБЛЮДЕНИЯ ЗА ПОВЕРХНОСТЬЮ НА БАЗЕ БОРТОВОЙ РЛС | 2003 |
|
RU2249832C1 |
| US 5847673 А, 08.12.1998 | |||
| US 5029307 А, 02.07.1991 | |||
| ДВУХПОЗИЦИОННЫЙ ТЕРМОРЕГУЛЯТОР | 0 |
|
SU334560A1 |

