Изобретение относится к области радиолокации и предназначено для применения в радиолокационных станциях (РЛС) для предотвращения столкновений летальных аппаратов с наземными препятствиями.
Известен «Способ получения трехмерного изображения поверхности по данным бортовой импульсно-доплеровской РЛС маловысотного полета» [RU 2299448 опубликовано 10.02.2007, МПК G01S 13/72]. Способ заключается в создании режима построчного обзора контролируемого участка пространства в сочетании с узкополосной доплеровской фильтрацией принятых сигналов, позволяющей рассечь пространственные элементы разрешения антенны на мелкие части (доплеровские элементы разрешения - ДЭР), и формировании матрицы трехмерного изображения поверхности в виде совокупности амплитуд отраженных сигналов, зафиксированных в ДЭР. При этом за счет быстрого электронного переключения луча РЛС смещают луч по азимуту и углу места построчно на ширину диаграммы направленности антенны в зоне обзора и при каждом положении луча по азимуту и углу места измеряют амплитуду сигнала на выходе J-го фильтра доплеровских частот в I-м элементе разрешения дальности. Тем самым получают двумерное изображение поверхности в пределах зоны обзора при каждом положении луча РЛС в виде совокупности амплитуд. При этом для каждой измеренной амплитуды, превышающей порог обнаружения (соответствующей отражению от поверхности), выбирают i, j, k-e элементы дискретизации прямоугольной сетки xi, yj, zk, сферические координаты которых R, ϕ, θ принадлежат области ДЭР, путем проверки системы неравенств:
D=D(I, J)={(R, ϕ, θ): RI-ΔR/2≤R≤RI+ΔR/2,
ϕJ-Δϕ≤ϕ≤ϕJ-Δϕ, θ(ϕ)-Δθ≤θ≤θ(ϕ)+Δθ,
θ(ϕ)=θJ+b⋅(ϕ-ϕJ)}
где RI, ϕJ, θJ - известные сферические координаты центра ДЭР, RI - дальность, ϕJ - азимут, θJ - угол места, ΔR - разрешение по дальности, Δϕ, Δθ, b - известные для каждого положения луча параметры аппроксимации границ ДЭР по углам, и если i, j, k-e элементы дискретизации принадлежат области ДЭР, то запоминают амплитуду данного ДЭР в матрице амплитуд А, а максимальное значение третьей координаты высоты - в матрице Z, затем повторяют эти операции для всех положений луча и тем самым формируют трехмерное изображение поверхности в зоне обзора РЛС в виде двумерных матриц А и Z.
Указанный способ применяет узкополосную доплеровскую фильтрацию для повышения разрешающей способности. Однако такое решение неэффективно в переднем секторе обзора ±10° по азимуту, из-за стремления к нулю приращения частоты за счет смещения угла. Это приводит к тому, что угловое разрешение при допустимых временах накопления сигнала близко к разрешению, обусловленному шириной диаграммы направленности антенны, и для увеличения разрешения требуется увеличение времени накопления до недопустимых значений [Авиационные радиолокационные комплексы и системы / Под ред. Дудника. М.: Изд. ВВИА им. проф. Н.Е. Жуковского, 2006 г., стр. 879]. При этом сектор ±10° по азимуту является наиболее актуальным в режиме обеспечения маловысотного полета летательного аппарата.
Наиболее близким по технической сущности является способ обнаружения препятствий, применяемый в радиолокационных системах обеспечения безопасности маловысотного полета [Авиационные радиолокационные комплексы и системы / Под ред. Дудника. М.: Изд. ВВИА им. проф. Н.Е. Жуковского, 2006 г., стр. 1001-1005]. Указанный способ заключается в том, что применяют сканирование антенной по углу места в направлении полета, посредством излучения и некогерентного накопления сигнала. Далее обужают суммарную диаграмму направленности антенны (ДНА) путем вычитания сигнала принятого разностной угломестной ДНА из сигнала принятого суммарной ДНА. При каждом угловом положении определяется дальность в равносигнальном направлении, и таким образом формируется продольный профиль рельефа местности.
Недостатками этого способа является получение профиля рельефа только по курсу летательного аппарата. Формирование профиля рельефа на каждой азимутальной позиции в широком диапазоне углов приведет к увеличению времени обзора пропорционально количеству позиций, что недопустимо. Таким образом, технической проблемой решаемой предлагаемым изобретением является создание способа радиолокационного обнаружения опасных препятствий при маловысотном полете летательного аппарата осуществляющего работу в широком диапазоне азимутальных углов при малом времени обзора.
Техническим результатом предлагаемого изобретения является расширение диапазона азимутальных углов, в котором осуществляется поиск опасных препятствий при маловысотном полете летательного аппарата.
Сущность изобретения заключается в том, что проводят сканирование лучом диаграммы направленности антенны (ДНА) по углу места от верхней границы угломестной зоны обзора в направлении подстилающей поверхности, посредством излучения и некогерентного накопления отраженного сигнала.
Новым в заявляемом способе является то, что перед сканированием по углу места осуществляют двухстрочный обзор подстилающей поверхности по азимуту лучом ДНА, причем нижнюю строку формируют таким образом, чтобы луч ДНА касался заранее заданной нижней границы безопасной зоны высот на дальности, соответствующей половине максимальной дальности зоны обзора, при этом осуществляют излучение и некогерентное накопление отраженного сигнала в диапазоне дальностей от нуля до половины максимальной дальности зоны обзора, а верхнюю строку обзора формируют таким образом, чтобы луч ДНА касался нижней границы безопасной зоны высот на максимальной дальности зоны обзора, при этом осуществляют излучение и некогерентное накопление отраженного сигнала в диапазоне дальностей от нуля до максимальной дальности зоны обзора. После накопления сравнивают амплитуды накопленных сигналов в каждой строке с заранее заданным порогом, при превышении амплитуды сигнала порога хотя бы в одной из строк фиксируют обнаружение препятствия, определяют азимут обнаруженного препятствия. Далее осуществляют упомянутое выше сканирование по углу места на азимуте обнаруженного препятствия, стробируют накопленный сигнал по дальности, сравнивают амплитуду сигналов в стробах дальности с пороговым значением, при превышении амплитудой порогового значения принимают решение об обнаружении верхней границы препятствия, определяют дальность до верхней границы препятствия и ее угол места, рассчитывают величину превышения над препятствием, если величина превышения меньше заданной величины, то определяют препятствие как опасное.
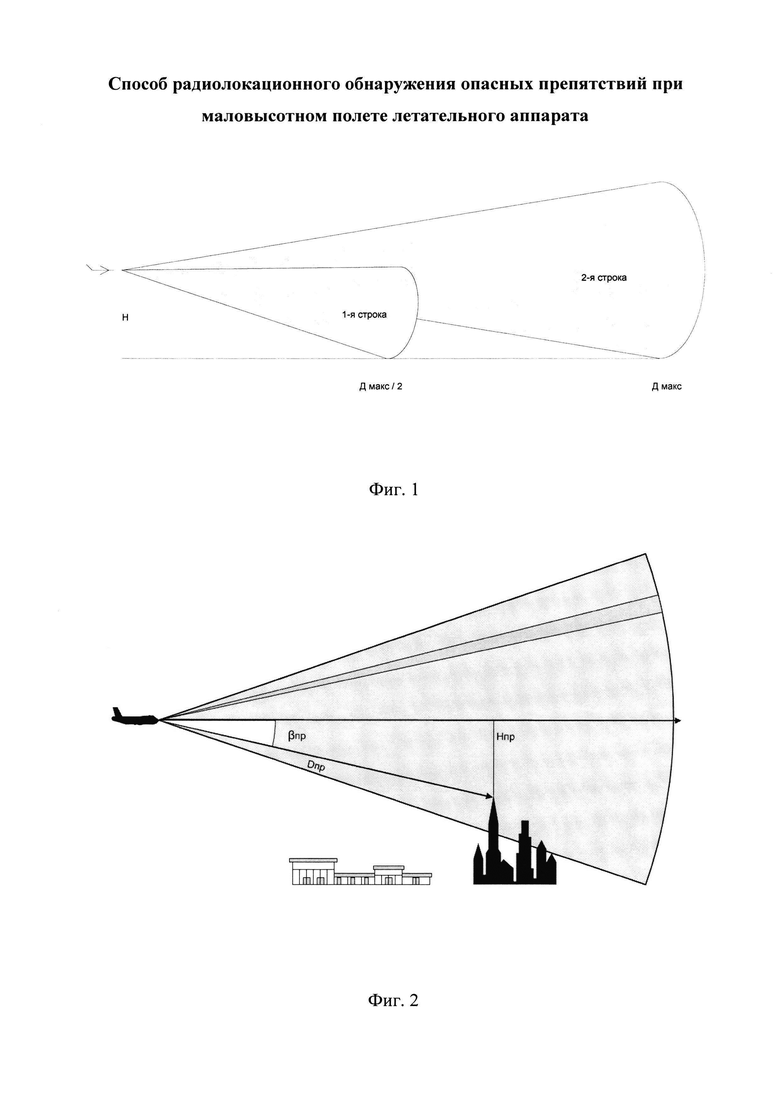
На фиг. 1 схематично изображено положение лучей ДНА по углу места при двустрочном сканировании по азимуту.
На фиг. 2 схематично изображен процесс сканирования по углу места на азимуте препятствия.
Способ радиолокационного обнаружения опасных препятствий при маловысотном полете летательного аппарата может осуществляться импульсно-доплеровской РЛС, размещенной на самолете-носителе. Пример выполнения такой радиолокационной станции приведен в книге [Радиолокационные системы многофункциональных самолетов. Т. 1. РЛС - информационная основа боевых действий многофункциональных самолетов. Системы и алгоритмы первичной обработки радиолокационных сигналов. / под ред. А.И. Канащенкова и В.И. Меркулова. - М.: «Радиотехника», 2006, стр. 126].
Режим обеспечения маловысотного полета запускается летчиком вручную, либо автоматически при снижении до заданной высоты. В режиме задаются параметры работы, такие как размер зоны безопасности по дальности (дальность зоны обзора) и нижняя граница безопасной зоны высот. Антенна РЛС начинает сканирование, выставляя луч ДНА в начальном положении зоны обзоры по азимуту. Пусть сканирование осуществляется слева направо. По углу места луч ДНА выставляют таким образом, чтобы он касался нижней границы безопасной зоны высот на дальности, соответствующей половине максимальной дальности зоны обзора (как показано на Фиг. 1). В таком положении луча ДНА осуществляют излучение сигнала и некогерентное накопление отраженного сигнала в диапазоне дальностей  где Dмакс - максимальная дальность зоны обзора.
где Dмакс - максимальная дальность зоны обзора.
Амплитуду накопленного сигнала сравнивают с заранее заданным порогом, при превышении которого препятствие считается обнаруженным на соответствующей дальности и на соответствующей азимутальной позиции. Далее луч ДНА на том же азимуте переставляют по углу места в положение, чтобы на максимальной дальности зоны обзора он касался нижней границы безопасной зоны высот. В таком положении луча ДНА осуществляют излучение сигнала и некогерентное накопление отраженного сигнала в диапазоне дальностей (0-Dмакс). Аналогично с предыдущим положением луча осуществляют пороговую обработку сигнала.
Если препятствие не было обнаружено ни в одной из строк, то смещают луч ДНА на следующую угловую позицию по азимуту и повторяют указанные операции.
При превышении порога в обеих строках в качестве дальности препятствия принимают минимальную дальность из двух строк.
Для азимута обнаруженного препятствия производят сканирование по углу места от верхней границы угломестной зоны обзора в направлении подстилающей поверхности. Процесс сканирования приведен на Фиг. 2. Для этого выставляют луч ДНА в положение соответствующее верхней границе заданного диапазона угла места. Затем излучают зондирующий сигнал, принимают отраженный сигнал. Некогерентно накапливают результирующий сигнал на данной угломестной позиции, стробируют сигнал по дальности и сравнивают амплитуды в стробах дальности с пороговым значением. Если амплитуда не превышает порогового значения, то смещают луч ДНА на следующую угломестную позицию и снова проводят излучение, прием и пороговую обработку сигнала. При превышении порогового значения принимают решение об обнаружении верхней границы препятствия и прекращают сканирование по углу места. Далее рассчитывают величину превышения над препятствием по координатам верхней границы препятствия угол места - дальность, путем пересчета координат по формуле
НПр=DПр⋅соs(βПр), где DПр - дальность до верхней границы препятствия, βПр - угол места границы препятствия.
Затем сравнивают величину превышения с заданной минимальной безопасной величиной превышения над препятствием и если величина превышения меньше заданной величины, то определяют препятствие как опасное.
Далее смещают луч ДНА на следующую азимутальную позицию и повторяют описанные выше операции, и таким образом осуществляется двухстрочное сканирование всей зоны обзора по азимуту.
Таким образом, осуществляется обнаружение опасных препятствий в широком секторе по азимуту при малом времени просмотра.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОЛУЧЕНИЯ ТРЕХМЕРНОГО ИЗОБРАЖЕНИЯ ПОВЕРХНОСТИ ПО ДАННЫМ БОРТОВОЙ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РЛС МАЛОВЫСОТНОГО ПОЛЕТА | 2005 |
|
RU2299448C2 |
| СПОСОБ ФОРМИРОВАНИЯ ТРЕХМЕРНОГО ИЗОБРАЖЕНИЯ ПОВЕРХНОСТИ С ВЫСОТНЫМИ ОБЪЕКТАМИ ПО ДАННЫМ БОРТОВОЙ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РЛС | 2007 |
|
RU2334250C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ И ФОРМИРОВАНИЯ ТРЕХМЕРНОГО ИЗОБРАЖЕНИЯ ПОВЕРХНОСТИ ПО ДАННЫМ БОРТОВОЙ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РЛС МАЛОВЫСОТНОГО ПОЛЕТА | 2007 |
|
RU2351949C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ ОБЪЕКТОВ НА ПОВЕРХНОСТИ ПРИ ПОЛУЧЕНИИ ТРЕХМЕРНОГО РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ПОВЕРХНОСТИ С ОБЪЕКТАМИ НА БАЗЕ БОРТОВОЙ РЛС МАЛОВЫСОТНОГО ПОЛЕТА | 2005 |
|
RU2300780C1 |
| СПОСОБ НАБЛЮДЕНИЯ ЗА ПОВЕРХНОСТЬЮ И ВОЗДУШНОЙ ОБСТАНОВКОЙ НА БАЗЕ БОРТОВОЙ РЛС | 2005 |
|
RU2284548C1 |
| СПОСОБ ПОВЫШЕНИЯ РАЗРЕШАЮЩЕЙ СПОСОБНОСТИ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ПО ДАЛЬНОСТИ И АЗИМУТУ | 2005 |
|
RU2287879C2 |
| Радиолокационный способ обнаружения беспилотных летательных аппаратов | 2021 |
|
RU2760828C1 |
| Радиолокационный способ обнаружения беспилотных летательных аппаратов | 2023 |
|
RU2821381C1 |
| Радиолокационный способ обнаружения беспилотных летательных аппаратов | 2022 |
|
RU2799866C1 |
| ВЕРТОЛЕТНЫЙ РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС | 2007 |
|
RU2344439C1 |
Изобретение относится к области радиолокации и предназначено для применения в радиолокационных станциях (РЛС) для предотвращения столкновений летальных аппаратов с наземными препятствиями. Достигаемый технический результат - расширение диапазона азимутальных углов, в котором осуществляется поиск опасных препятствий при маловысотном полете летательного аппарата, а также при сохранении малого времени обзора. Способ основан на том, что осуществляют двухстрочный обзор подстилающей поверхности по азимуту лучом ДНА на разных интервалах дальности. В процессе обзора накапливают отраженный сигнал, проводят пороговую обработку. При обнаружении препятствия осуществляют сканирование по углу места, обнаруживают верхнюю границу препятствия, рассчитывают превышение летательного аппарата над препятствием и сравнивают с допустимым превышением. 2 ил.
Способ радиолокационного обнаружения опасных препятствий при маловысотном полете летательного аппарата, заключающийся в том, что проводят сканирование лучом диаграммы направленности антенны (ДНА) по углу места от верхней границы угломестной зоны обзора в направлении подстилающей поверхности, посредством излучения и некогерентного накопления отраженного сигнала, отличающийся тем, что перед сканированием по углу места осуществляют двухстрочный обзор подстилающей поверхности по азимуту лучом ДНА, причем нижнюю строку формируют таким образом, чтобы луч ДНА касался заранее заданной нижней границы безопасной зоны высот на дальности, соответствующей половине максимальной дальности зоны обзора, при этом осуществляют излучение и некогерентное накопление отраженного сигнала в диапазоне дальностей от нуля до половины максимальной дальности зоны обзора, а верхнюю строку обзора формируют таким образом, чтобы луч ДНА касался нижней границы безопасной зоны высот на максимальной дальности зоны обзора, при этом осуществляют излучение и некогерентное накопление отраженного сигнала в диапазоне дальностей от нуля до максимальной дальности зоны обзора, после накопления сравнивают амплитуды накопленных сигналов в каждой строке с заранее заданным порогом, при превышении амплитуды сигнала порога хотя бы в одной из строк фиксируют обнаружение препятствия, определяют азимут обнаруженного препятствия, далее осуществляют упомянутое выше сканирование по углу места на азимуте обнаруженного препятствия, стробируют накопленный сигнал по дальности, сравнивают амплитуду сигналов в стробах дальности с пороговым значением, при превышении амплитудой порогового значения принимают решение об обнаружении верхней границы препятствия, определяют дальность до верхней границы препятствия и ее угол места, рассчитывают величину превышения над препятствием, если величина превышения меньше заданной безопасной величиной превышения над препятствием, то определяют препятствие как опасное.
| Авиационные радиолокационные комплексы и системы | |||
| Под ред | |||
| ДУДНИКА М | |||
| Изд | |||
| ВВИА им | |||
| проф | |||
| Н.Е.Жуковского, 2006, с.1001-1005 | |||
| ВЕРТОЛЕТНЫЙ РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС | 2007 |
|
RU2344439C1 |
| РАДИОЛОКАЦИОННЫЙ АВТОНОМНЫЙ СПОСОБ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ ЛЕТАТЕЛЬНОГО АППАРАТА С ПРЕПЯТСТВИЯМИ В ВЕРТИКАЛЬНОЙ ПЛОСКОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2507539C2 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА БЛИЖНЕГО ДЕЙСТВИЯ ДЛЯ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ С ПРЕПЯТСТВИЯМИ МАНЕВРИРУЮЩИХ НА АЭРОДРОМЕ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2001 |
|
RU2192653C1 |
| US 5309160 A, 03.05.1994 | |||
| EP 707220 A2, 17.04.1996 | |||
| JP 2000155900 A, 06.06.2000. | |||

