Область применения изобретения
Настоящее изобретение относится к механизмам, в которых применяют силу, прилагаемую в одном направлении для подъема или удержания нагрузки в направлении, перпендикулярном направлению прилагаемой силы. Такие механизмы находят применение во многих областях и могут быть использованы, например, в инструментах, предназначенных для работы в скважинах или трубах, как централизаторы, каверномеры, устройства, обеспечивающие зацепление, и тяговые устройства. Изобретение, в частности, может быть применено в области тяговых устройств, предназначенных для доставки каротажных и сервисных инструментов в наклонных или горизонтальных нефтяных или газовых скважинах, либо в трубопроводах, в которых такие инструменты не могут быть легко перемещены под действием силы тяжести. Изобретение также может быть применено в подъемных устройствах.
Описание родственных технических решений
После того как пробурена нефтяная или газовая скважина, часто необходимо провести каротаж скважины с помощью различных измерительных инструментов. Это обычно выполняют посредством каротажных инструментов с проводами, опускаемых внутрь скважины на каротажном тросе. Также может потребоваться проведение осмотра трубопроводов и, следовательно, перемещение различных измерительных инструментов вдоль трубы.
Некоторые каротажные инструменты могут действовать надлежащим образом только в том случае, если они расположены по центру скважины или трубы. Это обычно обеспечивают посредством централизатора. Все централизаторы действуют по одному и тому же общему принципу. Большое количество отстоящих друг от друга на равном расстоянии дугообразных пружин или рычажных механизмов различных типов выдвигается в радиальном направлении от центрального башмака к стенке буровой скважины или трубы. Эти пружины или рычажные механизмы входят в контакт со стенкой буровой скважины или трубы и оказывают радиальное усилие на нее, которое стремится переместить корпус инструмента в сторону от стенки. Поскольку дугообразные пружины и рычажные механизмы обычно симметричны по отношению к центральному башмаку, они стремятся расположить инструмент по центру скважины. Поэтому радиальные силы, оказываемые этими устройствами, часто называют централизующими силами.
Обычно централизаторы остаются раскрытыми на всем протяжении их работы. Другими словами, их рычажные механизмы всегда смещены к стенке буровой скважины, и они всегда остаются в контакте с этой стенкой. Большинство централизаторов конструируют таким образом, чтобы они могли действовать в большом диапазоне размеров буровых скважин. Когда централизаторы расширяются или сжимаются в радиальном направлении для приспосабливания к изменениям размера буровой скважины, силы их централизации могут изменяться. В скважинах, которые проходят почти вертикально, изменение радиальной силы не представляет собой проблему, поскольку радиальный компонент веса инструмента невелик и даже слабые централизаторы могут справиться с ним. Кроме того, сила централизации и сопротивление трения, к которому она приводит, представляют собой настолько малую часть полного натяжения каротажного троса, что их изменение может оказаться незначительным для всех практических целей.
Однако скважины, которые имеют горизонтальные или значительно наклоненные участки, представляют собой проблему. В горизонтальном участке скважины централизатор должен быть достаточно прочным, чтобы приподнимать полный вес инструмента со стенки буровой скважины. С одной стороны, минимальный уровень силы централизации должен быть равным весу инструмента, чтобы обеспечить надлежащую работу при всех размерах буровой скважины. С другой стороны, при ином размере буровой скважины сила, оказываемая централизатором, может быть чрезмерной, вызывая избыточное сопротивление трения, которое замедляет движение инструментов вдоль скважины. Эта ситуация привела к разработке централизаторов, действующих с постоянной силой, которые раскрыты ранее и поставляются промышленностью. Однако в настоящем изобретении предложен новый подход к созданию таких централизаторов, действующих с постоянной силой.
Подобно централизаторам, каверномеры выдвигают плечи или рычажные механизмы от корпуса инструмента к стенке буровой скважины. Одно из различий централизаторов и каверномеров заключается в том, что плечи каверномера могут быть приведены в действие по отдельности и могут не раскрываться на одну и ту же величину. Другое различие заключается в том, что плечи каверномера обычно избирательно раскрываются и смыкаются к корпусу инструмента посредством некоторых механических средств. Таким образом, плечи каверномера необязательно остаются в контакте со стенкой буровой скважины в течение всего времени. На плечах каверномера часто крепят различные измерительные инструменты. Для того чтобы обеспечить надлежащую работу некоторых из этих измерительных инструментов, часто необходимо сохранить заданный диапазон величины радиального усилия, с которым плечи каверномера прижимают к стенке скважины. Это требование иногда трудно выполнить в горизонтальных участках скважины и при изменяемых размерах скважины. Причина заключается в том, что подобно централизаторам выигрыш в силе рычажных механизмов каверномера изменяется с размером буровой скважины. Таким образом, механические устройства, ответственные за раскрытие и смыкание каверномера, должны обеспечивать переменное выходное усилие. Это обычно приводит к невысокой эффективности механического устройства и к его недостаточному использованию в большом диапазоне размеров буровой скважины. Поэтому полезно разработать рычажные механизмы каверномера, которые позволяют приложить фактически постоянные радиальные силы при наличии постоянной механической входной мощности от приводного устройства. В настоящем изобретении создан такой механизм.
Для горизонтальных и значительно наклоненных скважин характерна еще одна проблема. Каротажные инструменты не могут быть эффективно перемещены в таких скважинах под действием силы тяжести. Это привело к необходимости разработки альтернативных способов перемещения. Один из таких способов основан на использовании тянущего устройства в нисходящей скважине, которое тянет или толкает каротажные инструменты вдоль стенки.
В тяговых устройствах для нисходящих скважин, например, в таких устройствах, которые описаны в патентах США 5954131 и 6179055 В1, используют различные механизмы, расширяющиеся в радиальном направлении, чтобы принудительно подавать колеса или устройства, обеспечивающие зацепление, к стенке буровой скважины. Независимо от принципа, посредством которого обеспечивают движение по отношению к стенке буровой скважины, сила тяги, которую может создавать тяговое устройство, прямо пропорциональна радиальной силе, прилагаемой механизмом. Подобно централизаторам и каверномерам, тяговые устройства для нисходящих скважин конструируют таким образом, чтобы они действовали в широком диапазоне размеров буровых скважин. Как и для централизаторов, для них также характерна проблема изменения радиальной силы как функции размера буровой скважины. Обычно для данного механизма расширения сила тяги ослабевает в зависимости от размера буровой скважины. Предпочтительно, чтобы радиальная сила, которую развивает тяговое устройство, была постоянной. Однако удовлетворительного решения этой проблемы до сих пор не предложено.
В некоторых тяговых устройствах используют несколько групп рычажных механизмов разного размера, чтобы обеспечить относительно постоянную силу тяги в широком диапазоне размеров буровой скважины, однако замена этих механизмов должна быть осуществлена на поверхности, что весьма неудобно. Кроме того, некоторые скважины бурят так, что они будут иметь разнообразные размеры, так что придется манипулировать не одним механизмом. Согласно настоящему изобретению создан механизм, который может быть использован при всех известных концепциях создания тяги, чтобы обеспечить постоянную радиальную силу и, следовательно, соответствующую тягу в весьма широком диапазоне размеров буровой скважины.
Для выполнения своих функций централизаторы, каверномеры и тяговые устройства основаны на механизмах, расширяемых в радиальном направлении. Эти механизмы могут быть активными или пассивными. К активным механизмам энергию подводят посредством гидравлических или электрических приводных устройств. Их выполняют нормально замкнутыми и приводят в действие только в течение эксплуатации. Пассивные механизмы обычно основаны на пружинах, предназначенных для создания радиальной силы, действующей в наружном направлении. В то время как пассивные механизмы, развивающие постоянное усилие, поставляет промышленность, активные механизмы, действующие с постоянной силой, не были предложены.
В настоящем изобретении может быть использован как пассивный, так и активный механизм, который может создавать по существу постоянную радиальную силу.
В известном техническом решении, имеющем отношение к принципу работы изобретения, раскрыты либо конструкция централизаторов, развивающих постоянную силу, либо использование клиньев в централизующих устройствах. Например, в патенте США 4615386 раскрыт централизатор, который создает приблизительно постоянную радиальную силу в диапазоне размеров буровой скважины. Постоянство силы обеспечивают посредством сочетания двух пружин, имеющих разные характеристики. Сумма сил двух пружин остается приблизительно постоянной в широком диапазоне перемещений плеч централизатора. Преимущество такого подхода заключается в его простоте. Недостаток этого подхода состоит в том, что он может быть использован только в централизаторах, но не в каверномерах и в устройствах, обеспечивающих зацепление, в случае которых требуется избирательное раскрытие и смыкание плеч. Другой недостаток состоит в том, что при таком принципе работы необходимо, чтобы централизатор был довольно длинным, а это в некоторых случаях может оказаться нежелательным. Подобным же образом, в патентах США 4557327 и 4830105 раскрыты централизующие устройства, которые обеспечивают по существу постоянную силу централизации посредством сочетания по меньшей мере двух пружин разного типа. Преимущества и недостатки этих устройств подобны обсуждавшимся выше преимуществам и недостаткам. В патенте США 5005642 раскрыт централизатор каротажного инструмента, который обеспечивает пониженную степень изменения силы централизации посредством перемещения точек крепления централизующих плеч на противоположных сторонах корпуса инструмента. При этом угол между плечом централизатора и корпусом инструмента никогда не сможет принимать нулевое значение, что является условием, которое делает неработоспособными большинство других централизующих устройств, основанных на приведении в действие только в осевом направлении. Недостаток этого подхода заключается в том, что он не решает проблему полностью, поскольку радиальная сила все еще изменяется в зависимости от размера буровой скважины. Это также делает конструкцию устройства трудновыполнимой, особенно в том случае, когда желательно использовать более двух централизующих плеч.
Во всех обсуждавшихся выше патентах расширение централизатора в радиальном направлении обеспечивают посредством механизма, который состоит из двух плеч, соединенных друг с другом одним из их концов и прикрепленных их другими концами к подвижным башмакам. Когда расстояние между башмаками изменяется, точка крепления двух плеч перемещается внутрь или наружу в радиальном направлении. Другой подход для получения устройства, расширяемого в радиальном направлении, основан на использовании сужающихся поверхностей или клиньев. Централизаторы, созданные на основе этого принципа, раскрыты в патентах США 5348091 и 5934378. Инструмент для бурения скважин, расширяемый в радиальном направлении, раскрыт в патенте США 4693328. Принцип расширения в радиальном направлении вновь основан на движущихся частях, которые скользят по наклонным поверхностям (клиньям). Преимущество этой концепции заключается в том, что создаваемые силы могут быть значительными. Основной недостаток заключается в относительно ограниченном диапазоне радиального расширения.
В настоящем изобретении устранены недостатки обоих типов механизмов, расширяемых в радиальном направлении, которые обсуждены выше, посредством кинематического объединения этих механизмов в одном устройстве, что позволяет получить другие результаты, содержащие признаки новизны, отличающиеся от признаков любого из упомянутых устройств.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Согласно одному из аспектов настоящего изобретения создан исполнительный механизм, действующий с постоянной силой, который может быть использован при всех известных концепциях получения тягового усилия в буровой скважине для обеспечения по существу постоянной радиальной силы и, следовательно, соответствующую силу тяги в широком диапазоне размеров буровой скважины.
Согласно другому аспекту изобретения создан исполнительный механизм, действующий с постоянной силой, который может быть использован в качестве пассивного или активного механизма, способного создавать по существу постоянную радиальную силу для ее приложения к противоположным поверхностям.
Согласно еще одному аспекту настоящего изобретения создан исполнительный механизм, действующий с постоянной силой, который может быть эффективно использован в качестве операционного компонента централизатора, устройства, обеспечивающего зацепление, грузоподъемного устройства, либо других устройств, служащих для передачи силы, и может быть приведен в действие посредством пружин, гидравлических двигателей, пневматических двигателей, устройств, служащих для механического приведения в действие, и тому подобного.
Короче говоря, настоящее изобретение представляет собой механизм, в котором используют силу, прилагаемую в первом линейном направлении, чтобы поднимать или удерживать нагрузку, либо передавать усилие во втором линейном направлении, которое по существу перпендикулярно первому линейному направлению. Устройства и механизмы, создаваемые согласно принципам настоящего изобретения, конструируют таким образом, чтобы сила, которая требуется для удержания нагрузки, практически представляла собой постоянную величину и была независима от положения нагрузки во втором линейном направлении. В частности, изобретение относится к каротажным инструментам или другим устройствам для скважин, которые перемещают вдоль внутренних поверхностей буровой скважины или трубы, либо между отстоящими друг от друга поверхностями. Изобретение обычно может принимать форму централизатора, каверномера, устройства, обеспечивающего зацепление, либо тягового механизма для использования в скважинах, или может принимать форму подъемного устройства, либо устройства для удержания груза, когда оно осуществлено в виде домкратов или других устройств для подъема или удержания груза. Функция настоящего изобретения заключается в приложении радиальных сил к внутренней цилиндрической стенке буровой скважины, либо круглого канала, например трубы, или в воздействии на них, для централизации объектов внутри буровой скважины или трубы, чтобы выполнить функцию зацепления или создать механическое сопротивление, позволяющее обеспечить эффективную работу внутренних тяговых устройств для перемещения таких объектов, как каротажные инструменты. При использовании в качестве централизатора для каротажных инструментов большое количество подвижных в радиальном направлении приводных рычажных механизмов, с которыми выполнено настоящее изобретение, удерживает каротажные инструменты по центру буровой скважины и таким образом повышает точность каротажного процесса. Когда изобретение используют в качестве каверномера, в нем происходит выдвижение плеч или других рычажных механизмов к стенке буровой скважины и контролируемая радиальная сила оказывает воздействие на поверхность стенки. Когда изобретение используют в качестве устройства, обеспечивающего зацепление, может происходить приложение радиальных сил, которые создают достаточное трение, к стенке буровой скважины или трубы, или их воздействие на эту стенку, чтобы предотвратить какое-либо скольжение в точках контакта между устройством, обеспечивающим зацепление, и поверхностью стенки буровой скважины или трубы. Последнее необходимо для конструкции и работы в нисходящих скважинах таких тяговых инструментов, которые часто используют для перемещения других инструментов вдоль скважин, имеющих горизонтальные участки или участки со значительным наклоном. Основное преимущество настоящего изобретения заключается в том, что величины радиальных сил, которые оно прилагает к стенке буровой скважины, фактически будет постоянным и не зависит от размера буровой скважины.
Основные элементы изобретения представляют собой детали для передачи силы или башмаки, колеса, оси и по меньшей мере одну пару рычажных плеч с встроенными клиньями или с направляющими поверхностями, имеющими заданную геометрию, определяемую рычажными плечами. В целях настоящего изобретения предполагается, что каждый из терминов "детали для передачи усилия" или "башмаки" определяет детали любой желаемой конфигурации, которые относительно линейно подвижны, при этом подвижна одна из деталей или подвижны обе детали и, если желательно, одна из деталей неподвижна. Рычажные плечи, детали для передачи силы или башмаки и колеса соединены посредством оси, чтобы образовать рачажный механизм, который может расширяться или сходиться в радиальном направлении, когда расстояние между башмаками изменяется в осевом направлении. Рычажные плечи соединены друг с другом посредством шарнирного элемента или оси у одного из их концов, за счет чего обеспечивается возможность только углового движения рычажных плеч. Своими вторыми концами рычажные плечи прикреплены к отдельным башмакам посредством осей или шарниров, которые могут как вращаться, так и скользить внутри удлиненной прорези, выполненной в корпусе башмака. Колеса или ролики, которые определяют перемещение управляющих элементов, с возможностью вращения крепят к башмакам, и когда они находятся в контакте с направляющими поверхностями рычажных плеч, то катятся по предназначенным для передачи усилия направляющим поверхностям клиньев или по направляющим поверхностям, которые встроены в рычажные плечи, образованы на рычажных плечах или прикреплены к рычажным плечам. Хотя в качестве элементов башмаков, служащих для передачи силы, или деталей, служащих для передачи силы, показаны колеса или ролики, в пределах объема и существа настоящего изобретения могут быть применены иные структуры, чем колеса или ролики, чтобы передавать силу от башмаков к направляющим поверхностям клиньев или рычажных плеч. Направляющие поверхности, предназначенные для передач силы, имеют заданную геометрию, так чтобы взаимодействовать со служащими для передачи силы поверхностями колес или роликов и создавать векторы результирующих сил на рычажных плечах, которые расположены под углом по отношению к направлению линейного перемещения одного или обоих башмаков. Такие расположенные под углом векторы сил вызывают поворотное перемещение рычажных плеч даже в том случае, когда рычажные механизмы полностью отведены. Этот отличительный признак обеспечивает возможность легкого начального перемещения рычажных механизмов из их отведенных положений.
В изобретении объединены два отдельных принципа, что позволяет обеспечить требуемое расширение в радиальном направлении. При небольших углах между плечами и башмаками радиальную силу создают посредством колес, которые катятся по служащим для передачи силы поверхностям клиньев или рычажных плеч. При больших углах движение расширения рычажных механизмов создают на основе принципа треугольного трехстержневого рычажного механизма. Переход от одного принципа к другому происходит при выбранном промежуточном угле рычажных плеч между положениями полного отведения и полного выдвижения. Посредством сочетания этих двух принципов и посредством выбора, расположения и формы служащих для передачи усилия направляющих поверхностей клиновых элементов можно обеспечить фактически постоянное входное усилие, что представляет собой основное преимущество настоящего изобретения и отличает его от других подобных устройств.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Изобретение может быть более четко понято при рассмотрении приведенного ниже описания со ссылкой на сопроводительные чертежи, на которых:
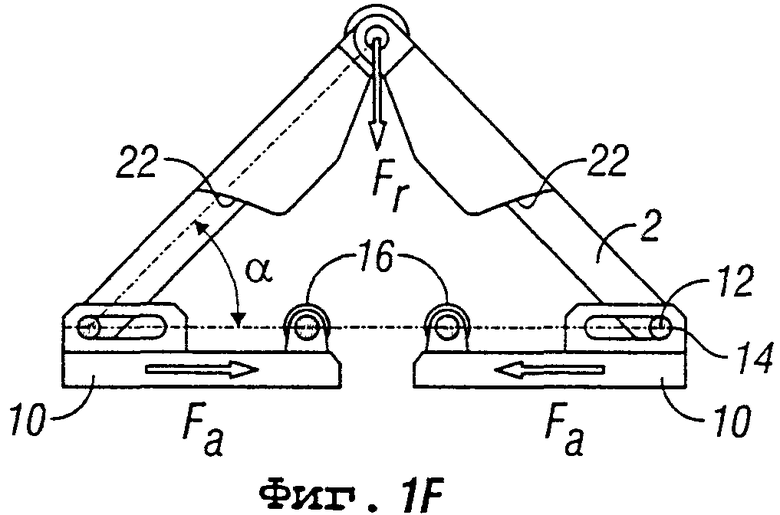
На фиг.1А-1F представлены виды первого приведенного в качестве примера варианта осуществления конструкции исполнительного механизма согласно изобретению, действующего с постоянной силой, при этом на них показаны различные положения упомянутого исполнительного механизма - от замкнутого или отведенного положения, показанного на фигуре 1А, до полностью раскрытого или выдвинутого положения, показанного на фигуре 1F;
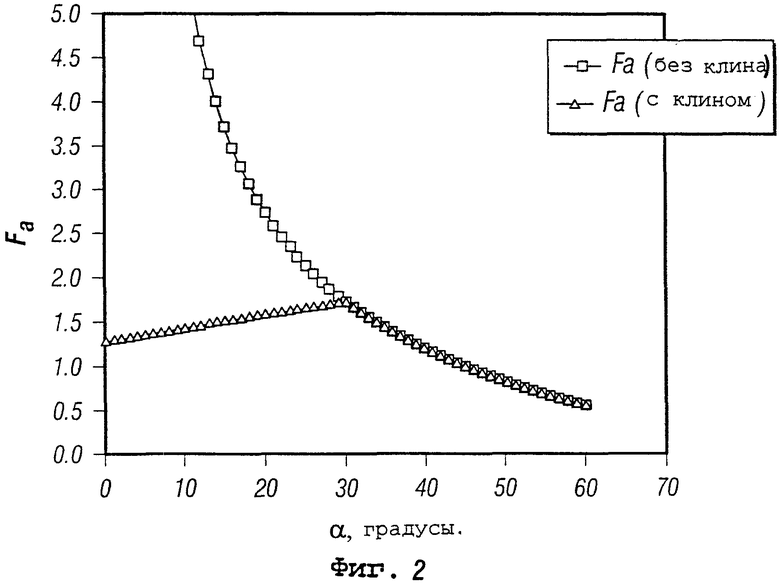
на фиг.2 представлена диаграмма зависимости силы от перемещения, иллюстрирующая осевую силу, требуемую для удержания радиальной нагрузки, при этом на фигуре представлено небольшое угловое перемещение рычажного механизма клином исполнительного механизма и большее угловое перемещение рычажного механизма, после того как рычажный механизм отделился от обеспечивающей передачу усилия поверхности клина;
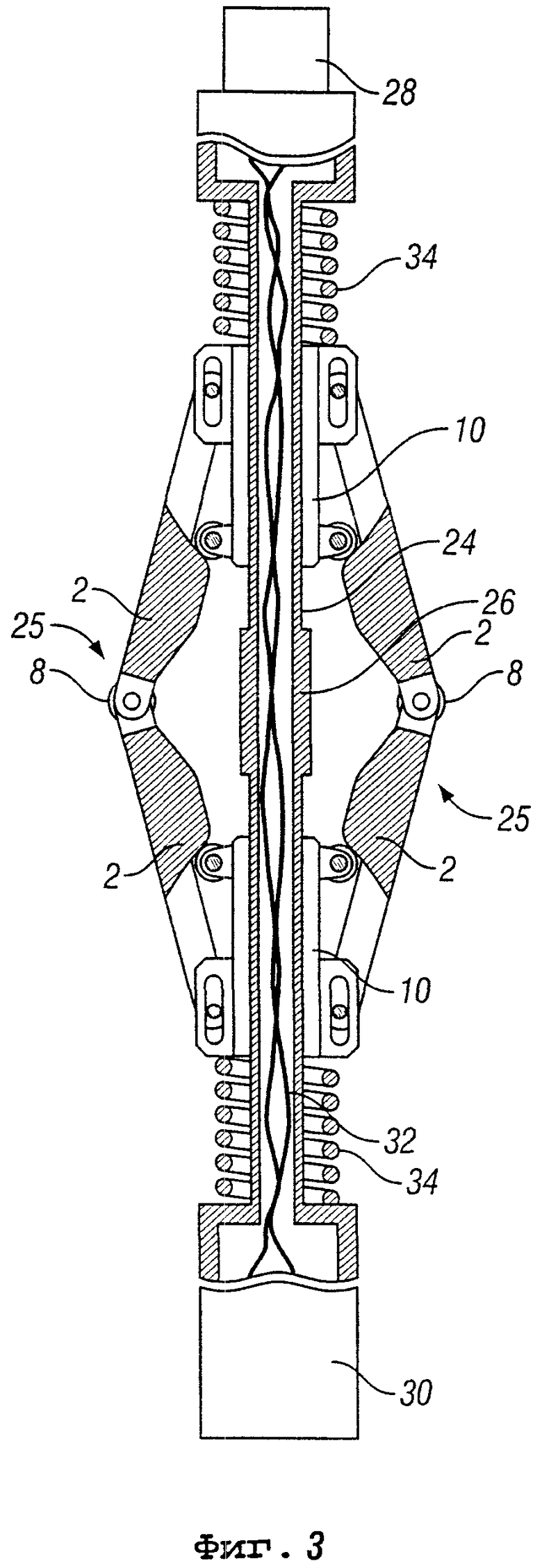
на фиг.3 представлен вид в сечении варианта осуществления конструкции централизатора со смещением пружинами, выполненного согласно настоящему изобретению, который может быть использован в скважинах или в других случаях применения с целью централизации, при этом он включает симметричные противоположные рычажные механизмы с роликом, входящим в зацепление с клиньями на всех рычажных плечах;
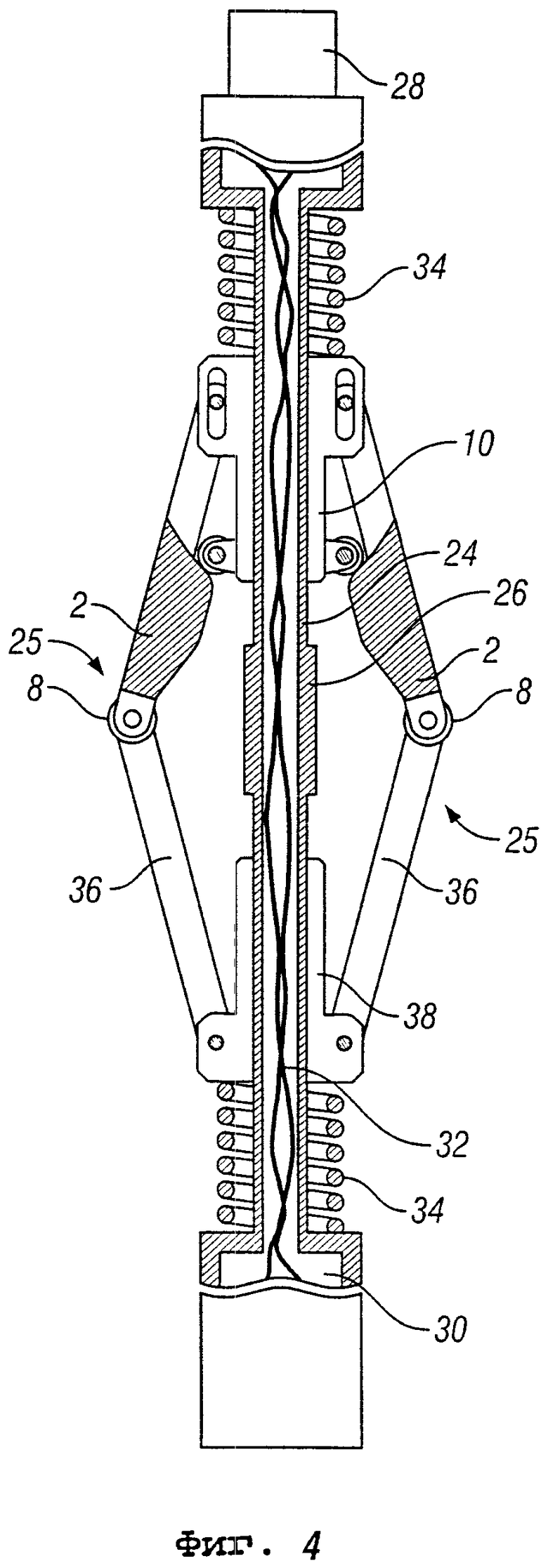
на фиг.4 представлен вид в сечении варианта осуществления конструкции централизатора со смещением пружинами, выполненного согласно настоящему изобретению, при этом он имеет асимметричные рычажные механизмы, содержащие колесо или ролик, входящие в зацепление с клиньями только на верхних участках рычажного плеча;
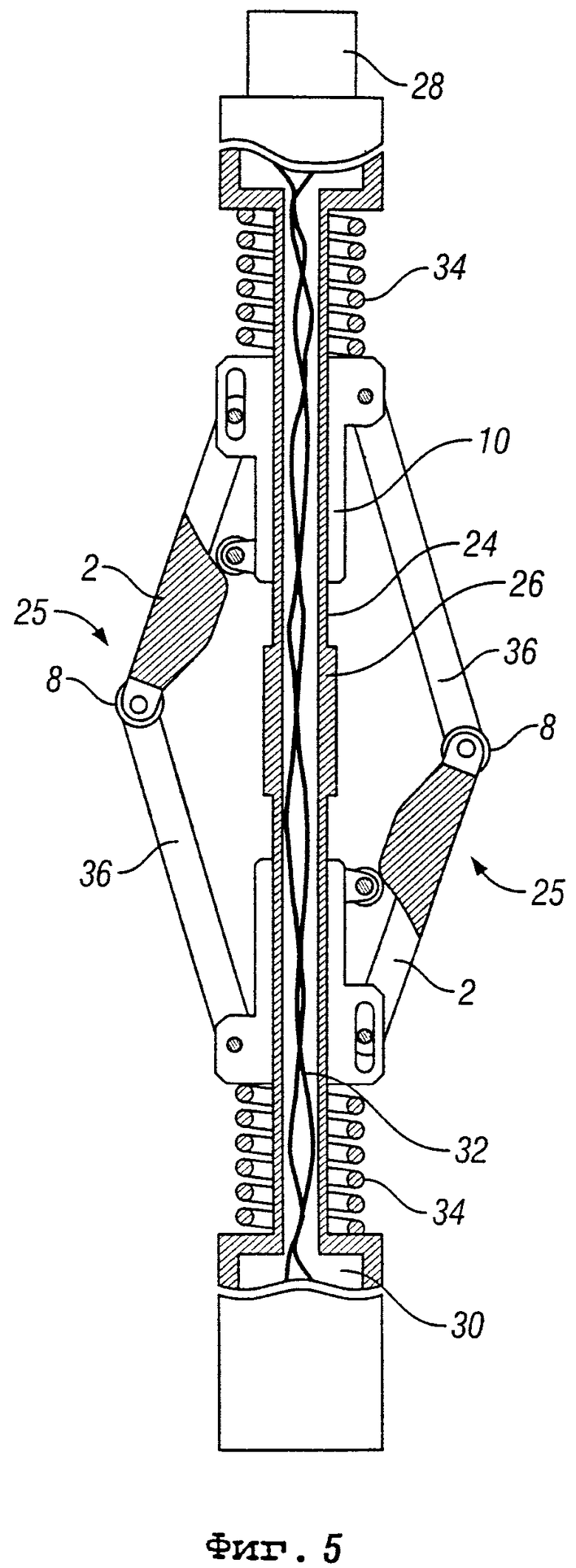
на фиг.5 представлен вид в сечении варианта осуществления конструкции централизатора со смещением пружинами, имеющего противоположно расположенные асимметричные рычажные механизмы;
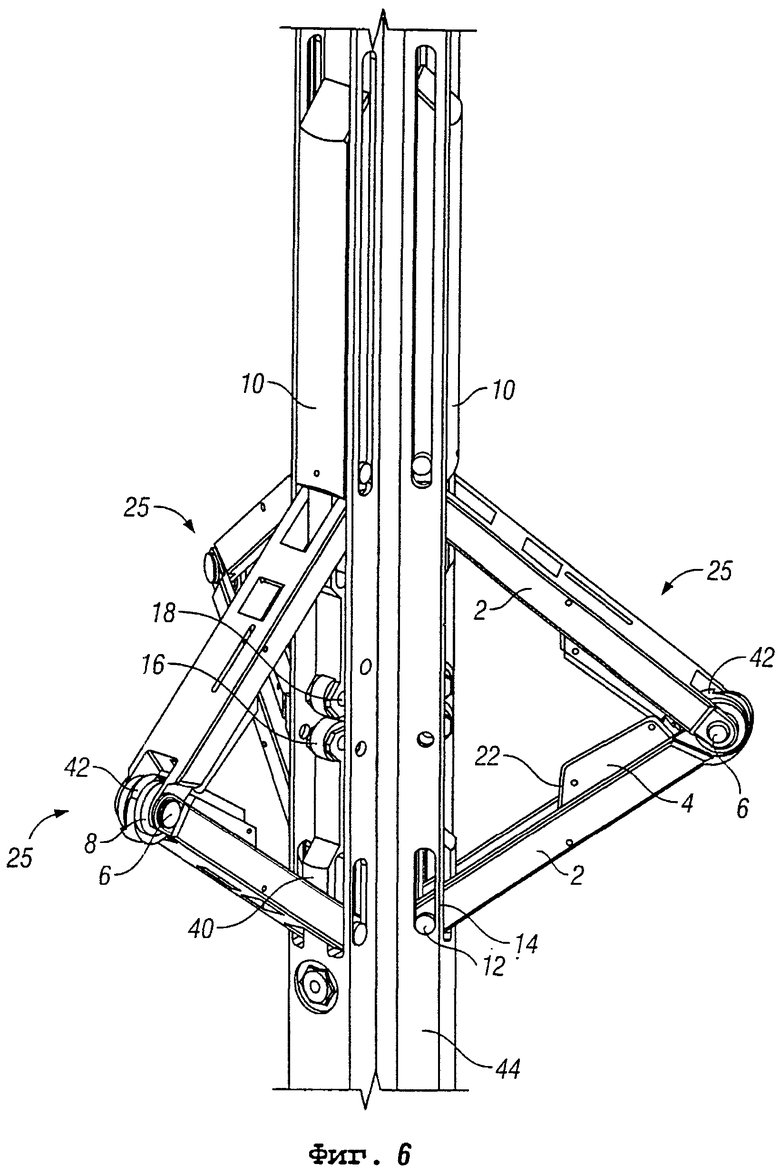
на фиг.6 представлен вид в изометрии, показывающий вариант осуществления конструкции согласно настоящему изобретению в качестве зажима тягового инструмента нисходящей скважины;
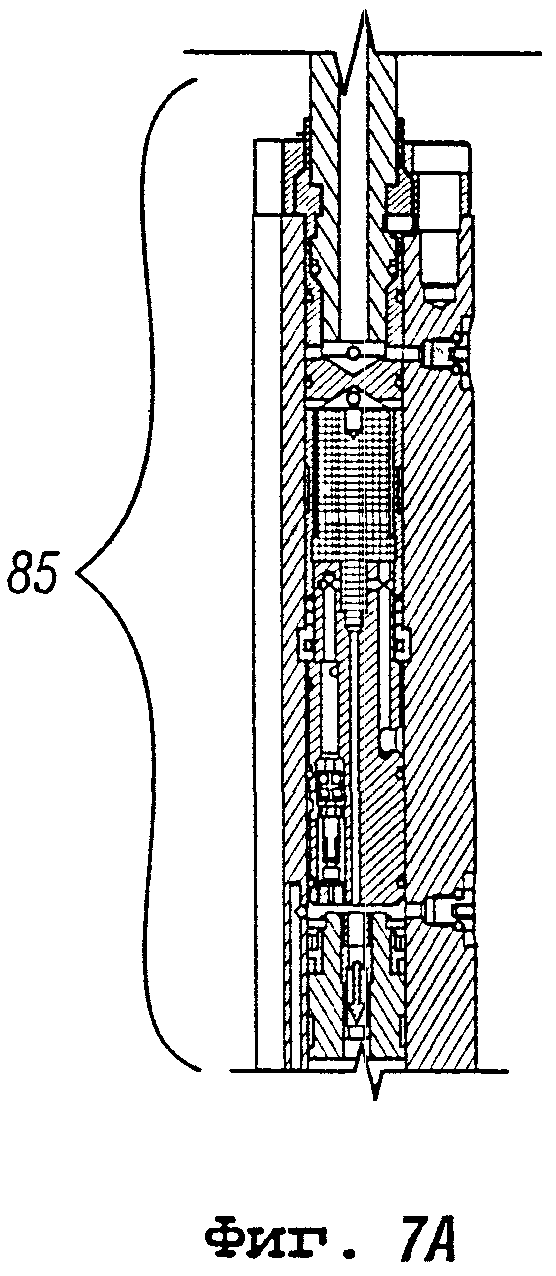
на фиг.7А представлен вид в сечении верхней части зажима тягового инструмента для нисходящей скважины, в котором осуществлены принципы настоящего изобретения;
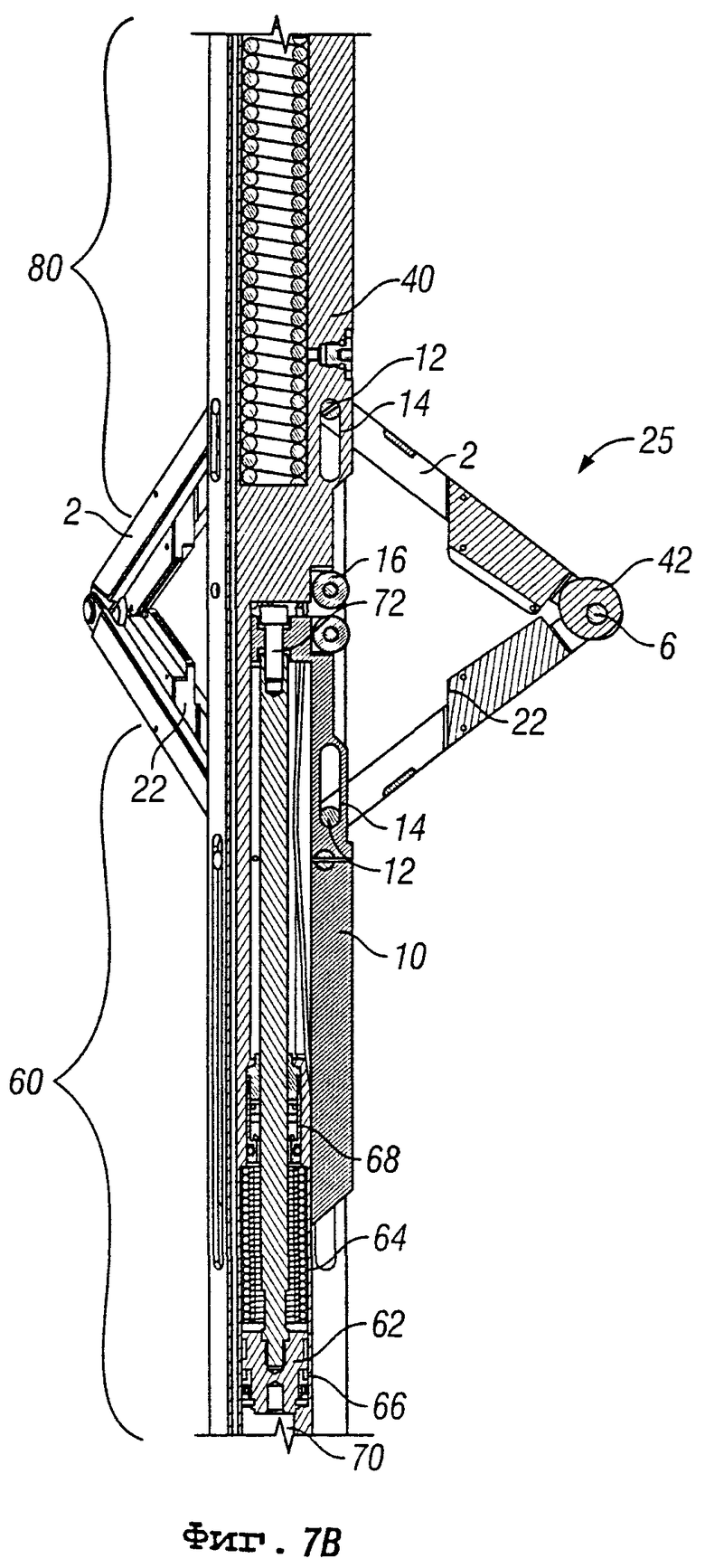
на фиг 7В представлен вид в сечении промежуточной части зажима согласно фигуре 7А;
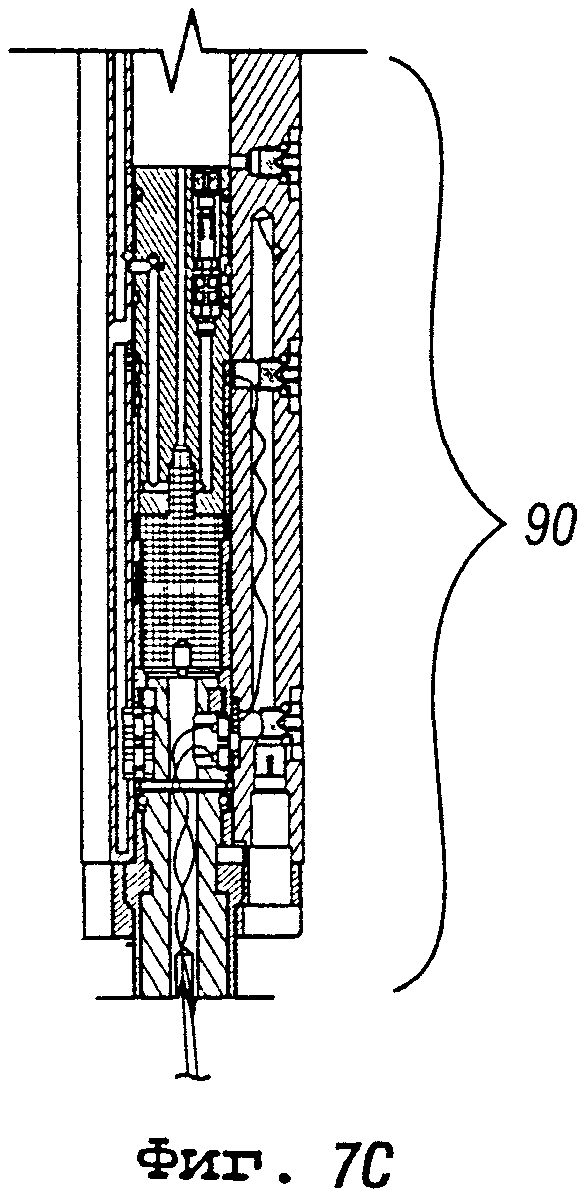
на фиг.7С представлен вид в сечении нижней части зажима согласно фигурам 7А и 7 В;
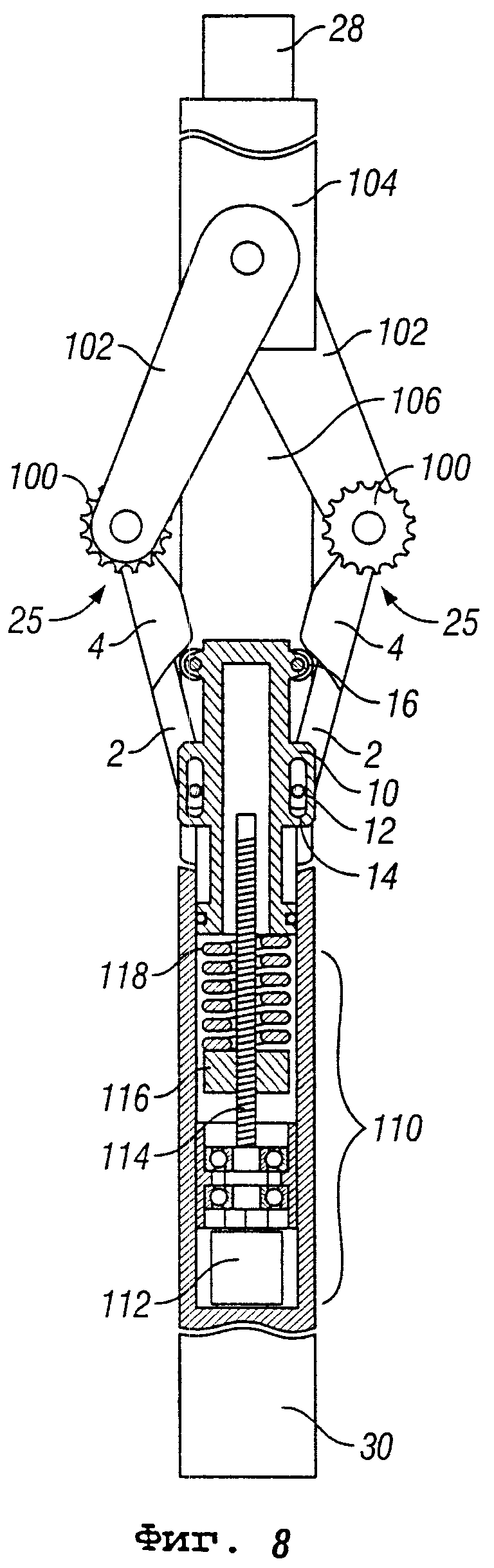
на фиг.8 представлен вид в сечении тягового механизма для нисходящей скважины, в котором осуществлены принципы настоящего изобретения и который включает силовые тяговые колеса для обеспечивающего приведение в действие зацепления с противоположными поверхностями или противоположными сторонами буровой скважины;
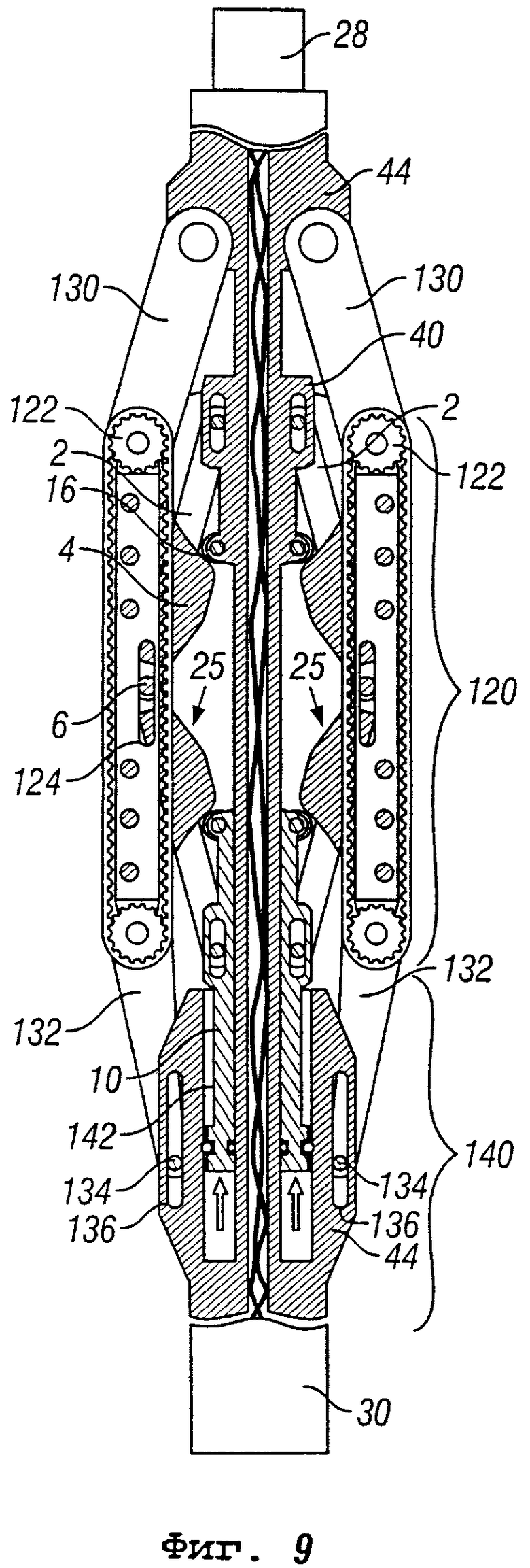
на фиг.9 представлен вид в сечении тягового механизма для нисходящей скважины, сконструированного согласно настоящему изобретению и включающего силовые цепи для обеспечивающего приведение в действие зацепления с противоположными поверхностями или с противоположными сторонами буровой скважины;
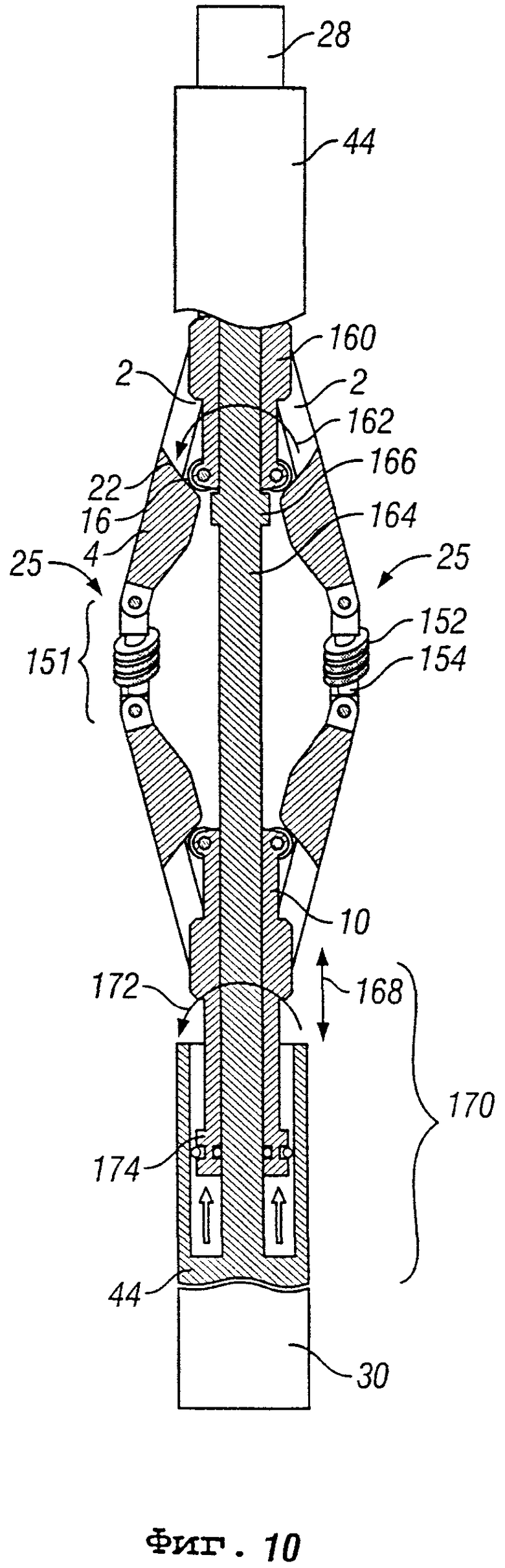
на фиг.10 представлен вид в сечении тягового механизма для буровой скважины, сконструированного согласно настоящему изобретению и имеющего ролики и поворотные башмаки для обеспечивающего приведение в действие зацепления с противоположными поверхностями или с противоположными сторонами буровой скважины;
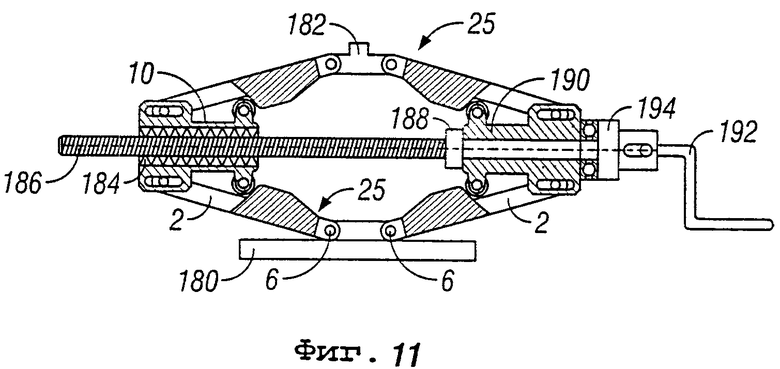
на фиг.11 представлен вид в сечении, показывающий подъемный механизм для подъема и опускания объекта, в котором осуществлены принципы настоящего изобретения и в котором обеспечено ручное приведение в действие противоположных рычажных механизмов посредством поворотного винта домкрата;
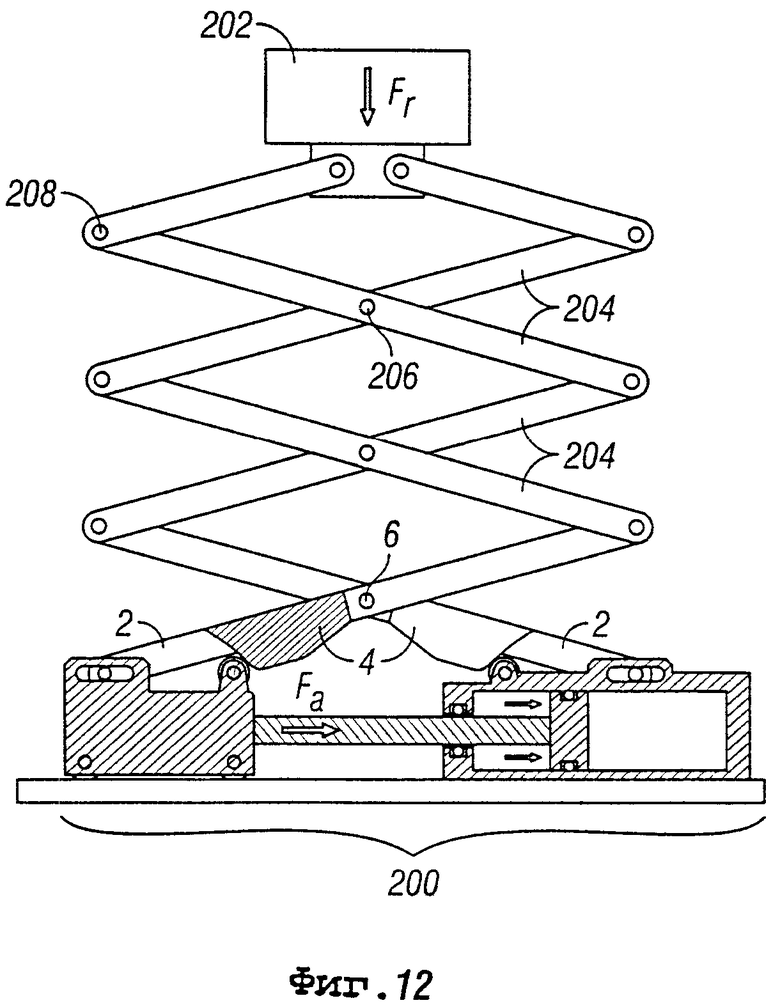
на фиг.12 представлены частичное сечение и частичный вид по высоте, иллюстрирующие ножничный механизм для подъема груза, имеющий группу ножничных плеч, образующих взаимодействующие рычажные механизмы с клиньями и передающими силу роликами для приведения ножниц в действие по существу с постоянной силой.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Ниже описаны варианты осуществления изобретения, приведенные только в качестве примера. Понятно, что при разработке любого такого реального варианта конструкции должен быть обеспечен ряд внедрений - определенных решений, чтобы добиться конкретных целей, поставленных разработчиком, например согласование с ограничениями, налагаемыми на систему и на деловую активность, которые будут изменяться от одного внедрения к другому. Кроме того, очевидно, что такая попытка разработки может оказаться затруднительной и потребует затрат времени, но тем не менее будет представлять собой обычную работу квалифицированных специалистов в этой области, которые извлекли пользу из того, что здесь раскрыто.
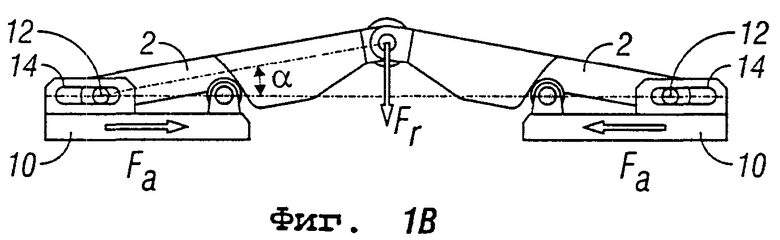
Если теперь обратиться к фиг.1А-1F, то на них основные принципы настоящего изобретения представлены посредством иллюстраций, демонстрирующих выполнение операции, при этом рычажный механизм устройства, действующий по существу с постоянной силой, показан в его замкнутом или полностью отведенном состоянии на фигуре 1А и на различных стадиях перемещения в полностью раскрытое или полностью выдвинутое положение, показанное на фигуре 1F. Основные элементы и принцип работы изобретения схематически представлены на фигуре 1А-1F. Два плеча 2 рычажного механизма с клиньями 4, которые составляют единое целое с плечами рычажного механизма, соединены друг с другом у их первых концов посредством оси или шарнира 6. Ось 6 также может соединять с плечами рычажного механизма другие элементы в зависимости от желаемой функции сконструированного устройства. В иллюстративных целях на фигуре 1А-1F показаны колесо или ролик 8, также установленный на оси 6, при этом подразумевается, что в данном случае изобретение может быть использовано в качестве централизатора с колесами 8, предназначенными для контакта с противоположными поверхностями или для контакта с противоположными стенками буровой скважины. Вторые концы плеч 2 рычажного механизма крепят к башмакам 10 посредством поворотных пальцев 12, которые скользят и вращаются внутри удлиненных прорезей 14, выполненных в башмаках 10. Колеса 16 устанавливают совместно с осями 18 на кронштейнах 20, которые являются частями башмаков 10. Функция колес 16 заключается в том, чтобы катиться по направляющим поверхностям 22 клиньев 4 и взаимодействовать с направляющими поверхностями 22 для передачи векторных сил плечам 2 рычажного механизма и обеспечения перемещения плеч рычажного механизма. Движение башмаков 10 ограничено только линейным перемещением по отношению друг к другу посредством иных элементов или устройств, служащих для передачи силы (на фигуре 1А-1F не показаны). Все эти элементы изобретения объединены для образования рычажного механизма, обозначенного позицией 25.
На фигуре 1А-1F показано положение рычажного механизма 25 при различных степенях расширения в радиальном направлении. На фигуре 1А рычажный механизм 25 показан в его замкнутом или полностью отведенном положении, когда угол между плечами и башмаками равен нулю (на фигуре 1В-1F угол обозначен-α). Следует заметить, что в этом положении колеса 16, входящие в соприкосновение с клиновыми поверхностями 22, находятся вблизи их верхних концов. Также следует заметить, что шарнирные пальцы 12 находятся у передних концов соответствующих удлиненных прорезей 14.
Теперь представим, что башмаки 10 смещены по направлению друг к другу посредством осевых сил, обозначенных на фигурах 1А-1F символом Fa. Это приводит к тому, что колеса 16 будут катиться вниз по направляющим поверхностям 22 клиньев 4, тем самым развивая силу, вектор которой ориентирован для толкающего воздействия на плечи рычажного механизма вверх и их вращения вокруг шарнирных пальцев 12. Во время движения рычажного механизма плечи 2 скользят и поворачиваются у своих вторых концов, что приводит к получению конфигурации, показанной на фигуре 1В. Следует заметить, что угол α между плечами 2 и прямой линией, соединяющей башмаки 10, увеличивается от нулевого значения на фигуре 1А до некоторой положительной величины на фигуре 1В. В этом случае пальцы 12 будут находиться в удлиненных прорезях 14 в некотором промежуточном положении. Шарнирные пальцы 12 свободно перемещаются в осевом направлении и поэтому не могут удерживать какую-либо осевую нагрузку. Однако они препятствуют перемещению в радиальном направлении вторых концов плеч 2 рычажного механизма. Все эти взаимодействия вынуждают первые концы плеч 2 рычажного механизма и колеса 8 перемещаться наружу в радиальном направлении для выдвижения рычажного механизма 25 в радиальном направлении. Когда колесо 8 входит в контакт со стенкой буровой скважины, оно начинает оказывать на нее радиальное усилие, перемещая башмаки 10 от стенки к центру буровой скважины, тем самым создавая централизующий эффект.
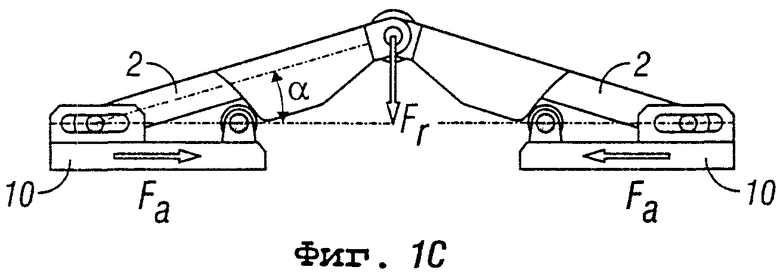
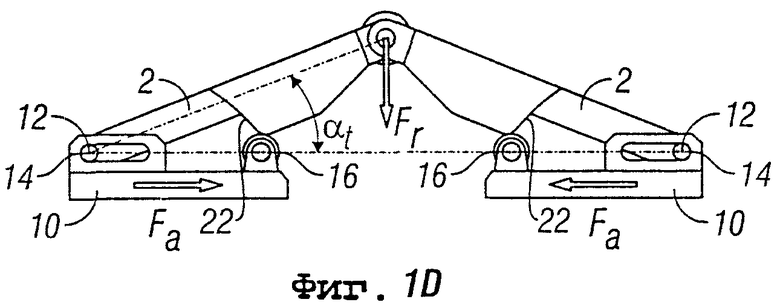
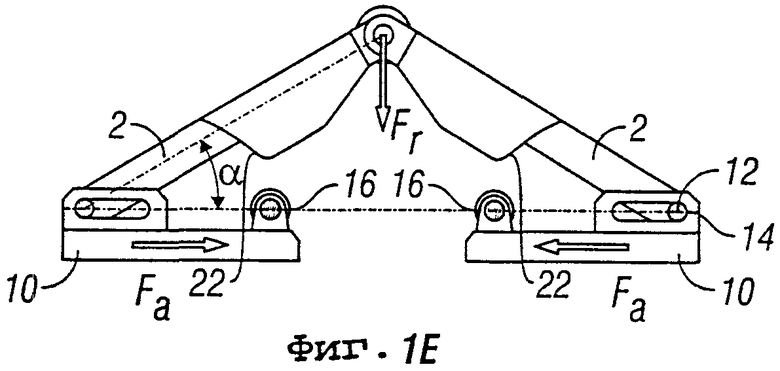
Дальнейшее расширение рычажного механизма 25 в радиальном направлении на основе качения колес 16 по направляющим поверхностям 22 показано на фигурах 1С и 1D. На этих фигурах видно, что угол α продолжает увеличиваться и колесо 8 продолжает перемещение наружу в радиальном направлении. На фигурах 1А-1D представлен первый кинематический принцип, используемый в изобретении, который основан на взаимодействии между направляющими поверхностями 22 клиньев 4 и колесами или роликами 16, служащими для передачи усилия. Следует заметить, что на фигуре 1D колеса 16 достигли самого нижнего конца клиновых поверхностей 22. Эта ситуация указывает, что величина расширения в радиальном направлении, основанная на этом первом кинематическом принципе, уже исчерпана. Также следует заметить, что шарнирные пальцы 12 достигли задних концов удлиненных прорезей 14. Это положение пальцев 12 и колес 16 представляет собой точку перехода между двумя кинематическими принципами, используемыми в изобретении. По этой причине угол плеча рычажного механизма на фигуре 1D обозначен символом αt (переход). При углах, меньших αt, расширение рычажного механизма в радиальном направлении будет обеспечено посредством клиньев, в то время как при углах, больших αt, расширение рычажного механизма в радиальном направлении будет обеспечено посредством эквивалента трехстержневого механизма. Второй кинематический принцип, на котором основано изобретение, представлен на фигурах 1D-1F. Два плеча 2 рычажного механизма и башмаки 10 формируют треугольный трехстержневой механизм с башмаками 10, представляющими собой стержень переменной длины. Когда расстояние между башмаками 10 уменьшается, треугольник изменяет форму при дальнейшем перемещении его вершины наружу в радиальном направлении. Следует заметить, что клинья 4 не принимают какое-либо участие в этом перемещении, поскольку, как показано на фигурах 1Е и 1F, направляющие поверхности 22 клиньев 4 отведены от колес или роликов 16.
Теперь вообразим, что направленная вниз радиальная сила Fr действует в течение всего процесса расширения. Также вообразим, что величина осевой силы Fa, которая необходима для преодоления Fr и продолжения расширения, будет записана и представлена в графическом виде. Такое графическое изображение представлено на фигуре 2. Точные значения величин и формы кривых, представленных на фигуре 2, будут изменяться в зависимости от местоположения клина 4 на плечах 2 рычажного механизма и от радиуса кривизны направляющих поверхностей 22 клина. Однако на фигуре 2 в достаточной степени представлено преимущество сочетания двух отдельных кинематических принципов в одном механизме. На фигуре 2 кривая, обозначенная символом Fa (без клина), иллюстрирует величину осевой силы Fa, которая потребуется для преодоления Fr,если используют только второй кинематический принцип трехстержневого рычажного механизма. Как следует из графика согласно фигуре 2, в этом случае Fa резко повышается при небольших значениях α. Это означает, что трехстержневой рычажный механизм, на котором основаны многие существующие устройства, испытывает реальные затруднения при удержании радиальных нагрузок при небольших углах. Фактически, при α равном нулю, осевая сила, требуемая для удержания нагрузки, должна быть бесконечно большой, а это означает, что для работы в таком диапазоне не может быть сконструировано устройство для практического использования. Вторая кривая на графике согласно фигуре 2 представляет собой возможные величины Fa, если объединены два кинематических принципа, что предложено в настоящем изобретении. Можно видеть, что удается избежать резкого увеличения Fa при небольших углах, и что Fa остается довольно постоянной в пределах значительного диапазона величин угла α. Следует заметить, что на фигуре 2 никоим образом не исчерпаны возможные значения Fa, которые могут быть достигнуты посредством настоящего изобретения. Ранее было указано, что посредством изменения местоположения клина 4 на плече 2 и посредством изменения радиуса кривизны 4 и геометрии направляющей поверхности 22, можно обеспечить почти любую форму кривизны в зависимости от функции, выполнение которой требуется от конкретного варианта осуществления изобретения.
Различные варианты осуществления изобретения более подробно обсуждены на фигурах 3-12. На фигуре 3 представлен один из вариантов осуществления изобретения, выполненный в виде централизатора инструмента. Минимум три рычажных механизма 25 (на фигуре 3 представлены только два противоположных рычажных механизма) объединены друг с другом посредством общих башмаков 10. Башмаки 10 скользят по направляющей части 24. За одно целое с направляющей частью 24 выполнен стопор 26 башмаков, который ограничивает линейное перемещение башмаков 10 по направляющей части 24. Направляющая часть 24 также подсоединена к верхней головной части 28 и к нижней головной части 30, которые используют для подсоединения централизатора к другим инструментам и устройствам в колонне инструментов (детали соединений с другими инструментами не существенны для настоящего изобретения и на фигуре 3 не показаны). Направляющая часть 24 также может содержать провода 32, проходящие через нее для электрической связи с другими инструментами в колонне инструментов. Осевую силу, которая вынуждает централизатор расширяться в радиальном направлении и размещать другие инструменты в колонне инструментов по центру буровой скважины, обеспечивают посредством пружин 34. Как видно из варианта конструкции, показанного на фигуре 3, для того, чтобы сконструировать централизатор с относительно постоянной силой централизации, необходим только один тип пружины.
Рычажный механизм 25, используемый для конструирования различных устройств, необязательно должен быть симметричным. Два устройства, которые сконструированы с асимметричными рычажными механизмами, действие которых основано на раскрытых выше принципах, показаны на фигурах 4 и 5. Согласно этим фигурам только одно из плеч, которые используют для создания рычажного механизма, имеет клин. Как вариант, клинья с направляющими поверхностями, имеющими различную геометрию, могут быть обеспечены на плечах, которые имеют неодинаковую длину.
Во всех обсуждавшихся выше вариантах осуществления изобретения представлены централизаторы для колонны инструментов. Централизаторы, обеспечивающие постоянное усилие, могут быть созданы с помощью средств, отличающихся от тех средств, которые обсуждались выше. В настоящем изобретении представлен новый способ, посредством которого могут быть сконструированы такие централизаторы.
Однако преимущества изобретения значительно выше в случае устройств, которые обладают способностью избирательного раскрытия их рычажных механизмов из корпуса инструмента и смыкания этих механизмов в корпусе инструмента. Причина заключается в том, что такие "активные" устройства обычно имеют только осевые линейные исполнительные механизмы, предназначенные для раскрытия и смыкания рычажных механизмов в инструменте, что противоположно элементам, используемым в централизаторах, которые имеют радиальный компонент силы. Примерами устройств, которые требуют избирательного раскрытия и смыкания рычажных механизмов, являются каверномеры и тяговые инструменты для нисходящих скважин. Вариант осуществления изобретения, используемый в качестве зажима в тяговом устройстве для нисходящей скважины, представлен на фигурах 6 и 7А-7С. На фигуре 6 представлен вид в трех измерениях зажима тягового инструмента, который сконструирован, используя обсуждавшиеся выше принципы исполнительного механизма, действующего с постоянной силой. Зажим тягового инструмента выполняет две основные функции. Первая функция заключается в выполнении избирательного раскрытия и смыкания различных механизмов и в централизации инструмента в буровой скважине, когда возникает такая необходимость. В этом отношении зажим тягового устройства ненамного отличается от централизаторов, показанных на фигурах 3-5. Различие заключается в том, что зажим не раскрыт постоянно и его приводят в действие посредством гидравлических или электромеханических исполнительных механизмов, которые обеспечивают избирательное раскрытие или смыкание. Вторая функция зажима тягового устройства заключается в избирательном зацеплении инструмента со стенкой скважины. В варианте конструкции, показанном на фигуре 6, это обеспечивают посредством установки кулачков 42 у вершин рычажных механизмов 25 и устройства для избирательной фиксации геометрии рычажного механизма (на фигуре 6 не показано). Принцип, согласно которому кулачки 42 избирательно обеспечивают зацепление инструмента со стенкой скважины, а также физика создания тяговой силы раскрыты в патентах США 5954131 и 6179055, а также в одновременно поданной заявке на патент в США 09/921825, введенной в настоящее описание посредством ссылки. Поскольку для работы предложенного изобретения они не важны, их подробное обсуждение здесь не приведено.
Как показано на фигуре 6, зажим тягового устройства состоит из трех симметричных рычажных механизмов 25. Подобно описанию, касающемуся фигуры 1, каждый рычажный механизм состоит из двух плеч 2, которые соединены друг с другом у их первых концов посредством оси 6. Ось 6 также соединяет другие элементы зажима, например колеса 8 и двунаправленный кулачок 42, который ответственен за выполнение тягового действия. Согласно фигуре 6 три верхних плеча 2 крепят к башмаку 10, который может скользить по отношению к корпусу 44 зажима. Это также подобно описанию, приведенному применительно к фигуре 1. Однако три нижних плеча 2 не крепят к подвижному башмаку, а вместо этого крепят к неподвижному башмаку 40, который представляет собой часть корпуса 44 зажима, выполненную совместно с ним как единое целое. Это демонстрирует гибкость изобретения. Как разъяснено ранее, единственное требование для работы изобретения заключается в том, чтобы башмаки 10 могли перемещаться по отношению друг к другу в осевом направлении. Однако нет необходимости в том, чтобы оба башмака могли перемещаться по отношению к корпусу инструмента. На фигуре 6 также показаны другие элементы изобретения, такие как клинья 4, направляющие поверхности 22 клиньев, колеса 16, шарнирные пальцы 12 и прорези 14. Следует заметить, что зажим согласно фигуре 6 показан в его полностью раскрытом или выдвинутом состоянии. Подвижный башмак 10 и неподвижный башмак 40 соприкасаются, что видно в непосредственной близости от колеса 16. Также следует заметить, что пальцы 12 находятся в нижнем конце прорезей 14, а это указывает на то, что задействован второй кинематический принцип изобретения. На фигуре 6 также показано, что направляющие поверхности 22 клиньев могут быть выполнены плоскими (бесконечный радиус кривизны), чтобы обеспечить желаемые характеристики, касающиеся силы.
Базовые элементы изобретения, показанные на фигуре 6, могут быть объединены с другими рычажными механизмами, чтобы сконструировать более сложные механизмы. Хотя изобретение описано применительно только к базовой группе элементов, квалифицированным специалистам в этой отрасли, которые извлекли пользу из приведенного описания, будет очевидно, что могут быть разработаны другие варианты осуществления конструкции, которые не выходят за пределы объема раскрытого здесь изобретения.
На фигурах 7А-7С представлены виды в поперечном сечении варианта осуществления зажима тягового устройства для нисходящей скважины, показанного на фигуре 6. На фигуре 7В представлено продолжение фигуры 7А, а на фигуре 7С представлено продолжение фигуры 7В. Рычажные механизмы 25 зажима тягового устройства, показанного на фигурах 7А-7С, представлены в их полностью раскрытом положении. Следует заметить, что колеса 16 находятся на удалении от направляющих поверхностей 22 клиньев. Помимо элементов варианта конструкции, обсужденного ранее, на фигуре 7В показан исполнительный механизм 60, который обеспечивает осевое усилие, необходимое для избирательного раскрытия рычажного механизма 25 из корпуса инструмента и его смыкание в нем, а также показаны детали гидравлических цепей управления, необходимых для работы зажима. В этом конкретном варианте осуществления конструкции осевую силу создают посредством гидравлического исполнительного механизма 60, который состоит из поршня 62, пружины 64 и динамических уплотнений 66 и 68. Поршень 62 исполнительного механизма 60 может перемещаться вверх и вниз, когда камеру 70 подсоединяют к источнику рабочей жидкости под высоким давлением (на фигурах 7А-7С не показан) и отсоединяют ее от этого источника. Поршень 62 крепят к подвижному башмаку 10 посредством винта 72 и при этом движение исполнительного механизма приводит к перемещению башмака 10 относительно башмака 40. Другими элементами варианта конструкции, показанного на фигурах 7А-7С, являются аккумулятор высокого давления, в целом обозначенный позицией 80, и две гидравлических гильзы 85 и 90, которые управляют раскрытием и смыканием рычажных механизмов 25, а также управляют процессом создания силы тяги. Поскольку аккумулятор 80 высокого давления и гидравлические гильзы 85 и 90 не имеют прямого отношения к работе изобретения, и поскольку они раскрыты в одновременно поданной на заявке на патент США 09/921825, их подробное обсуждение здесь не приведено. Все другие элементы изобретения, показанные на фигурах 7А-7С, имеют те же самые обозначения и выполняют те же самые функции, что и элементы, обсуждавшиеся применительно к предыдущим фигурам.
Для квалифицированных специалистов в этой отрасли будет очевидно, что совместно с изобретением могут быть объединены тяговые механизмы, отличающиеся от тех, которые имеют кулачки. Таким образом, изобретение может улучшить работу фактически каждого тягового инструмента для нисходящей скважины независимо от принципа, на котором основано создание силы тяги тягового устройства. Примеры использования различных тяговых устройств совместно с изобретением схематически показаны на фигурах 8, 9 и 10.
На фигуре 8 представлен тяговый инструмент для нисходящей скважины, в котором силу тяги создают посредством силовых приводных колес 100, установленных на вершинах рычажных механизмов 25. Подобно конструкции асимметричного рычажного механизма, показанной на фигуре 4, тяговый инструмент, показанный на фигуре 8, имеет плечи 2, оснащенные клиньями 4 только с нижней стороны каждого рычажного механизма 25. Два верхних плеча 102 могут лишь поворачиваться по отношению к неподвижному башмаку 104, который представляет собой часть корпуса 106 инструмента, выполненного совместно с ним как одно целое. Плечи 102 также вмещают приводные цепи (не показаны), которые передают вращательное движение от двигателя (не показан) внутри корпуса 106 инструмента к приводным колесам 100. Подвижный башмак 10, плечи 2, клинья 4, колеса 16, пальцы 12 и прорези 14 функционируют так, как описано применительно к фигуре 1. На фигуре 8 также схематически представлен один из типов исполнительного механизма 110, который может быть использован для избирательного раскрытия и смыкания рычажного механизма 25. В этом варианте осуществления конструкции исполнительный механизм 110 состоит из двигателя 112, который приводит в движение винт 114. Когда винт 114 поворачивается, шариковая гайка 116 перемещается вверх или вниз. Шариковая гайка 116 передает свое линейное движение башмаку 10 посредством пружины 118, что придает гибкость рычажному механизму 25, необходимую в том случае, когда тяговый инструмент сталкивается с изменениями размера буровой скважины или с другими препятствиями.
На фигуре 9 схематически представлен другой тяговый механизм, который может быть использован совместно с изобретением. В этом случае цепи 120 устанавливают по краям симметричных рычажных механизмов 25. Цепи крепят к рычажным механизмам 25 посредством поворотных пальцев 6, которые могут скользить и поворачиваться в прорезях 124, выполненных в цепях 120. В верхних концах цепи 120 крепят к плечам 130, которые подобно плечам 102 на фигуре 8 вмещают механические элементы (не показаны) для передачи вращательного движения от двигателя (не показан) в корпусе 44 инструмента к приводным звездочкам 122 цепей 120. У своих нижних концов цепи 120 прикреплены к другой группе плеч 132, которые обеспечивают возможность прохождения тягового инструмента через изменение размера буровой скважины и другие препятствия. Плечи 132 прикреплены к корпусу 44 инструмента посредством пальцев 134, которые скользят в прорезях 136. На фигуре 9 также показаны подвижный башмак 10 и неподвижный башмак 40, которые выполняют точно такие же функции, что и функции, описанные применительно к фигуре 6. Исполнительный механизм 140, показанный на фигуре 9, действует на основе принципа, отличающегося от принципа действия исполнительного механизма 110, показанного на фигуре 8. Исполнительный механизм 140 содержит гидравлический поршень 142, который составляет единую часть с подвижным башмаком 10. Это демонстрирует гибкость изобретения, а также то, что изобретение будет работать с разнообразными исполнительными механизмами, которые действуют на основе различных принципов. Тип используемого исполнительного механизма не влияет на то, как в изобретении будет обеспечено расширение.
На фигуре 10 представлен схематический вид еще одного варианта осуществления настоящего изобретения, имеющего форму тяговой системы для нисходящей скважины. В этом случае роликовые узлы 151, которые состоят из роликов 152, устанавливают на наклонных осях 154 у вершин рычажных механизмов 25. Тяговое действие обеспечивают посредством вращения подвижного башмака 10 и неподвижного башмака 160 по отношению к центральной направляющей детали 164 корпуса 44 инструмента. Направление вращения указано на фигуре 10 стрелкой 162. Когда вращается вся группа рычажных механизмов 25, тяговый инструмент совершает движение по спирали вдоль внутренней стенки буровой скважины. Вращательное движение тягового механизма создают посредством двигателя и зубчатой передачи (не показана), которые находятся внутри корпуса 44 инструмента. Далее вращательное движение передают башмаку 160. Следует заметить, что башмак 160 может лишь свободно вращаться по отношению к центральной направляющей детали 164, а его скольжение по отношению к корпусу 44 инструмента предотвращают посредством выступа 166, который образован увеличенным участком центральной направляющей детали 164. Другой башмак 10 может совершать как вращение, так и поступательное перемещение по отношению к центральной направляющей детали 164, что указано стрелками 172 и 168. Когда башмак 10 скользит вверх или вниз по центральной направляющей детали 164, рычажные механизмы 25 будут расширяться или отводиться в радиальном направлении. Подобно обсуждавшимся ранее вариантам осуществления конструкции, поступательное перемещение башмака 10 вверх или вниз обеспечивают посредством линейного исполнительного механизма, обозначенного позицией 170. На фигуре 10 исполнительный механизм показан в виде гидравлического поршня 174, который представляет собой часть, выполненную заодно с башмаком 10. Как было разъяснено ранее, без отклонения от объема патентных притязаний и существа настоящего изобретения также могут быть сконструированы исполнительные механизмы, действующие в соответствии с иными принципами.
Во всех обсуждавшихся вариантах осуществления конструкции изобретение было объединено с другими механизмами, чтобы сконструировать различные инструменты, которые предназначены для работы как в скважинах, так и в трубопроводах. Однако изобретение не ограничено этими вариантами осуществления конструкции. В общем, изобретение может улучшить работу любого устройства, которое предназначено для удержания нагрузки в одном направлении посредством приложения силы во втором направлении, перпендикулярном первому направлению. Два таких варианта конструкции представлены на фигурах 11 и 12. На фигуре 11 представлен вариант конструкции согласно настоящему изобретению, который функционирует в качестве грузоподъемного устройства, например домкрата, предназначенного для подъема и опускания самоходного транспортного средства. Согласно фигуре 11 один симметричный рычажный механизм 25 прикреплен к основанию 180, в то время как другой рычажный механизм 25 прикреплен к подъемному приспособлению 182. Два элемента, служащих для передачи усилия, или башмаки 10 и 190 функционируют точно таким же образом, как описано применительно к фигуре 1, когда они перемещаются по отношению друг к другу в осевом направлении. Осевой исполнительный механизм в данном случае представляет собой механизм, состоящий из винта и гайки, при этом приводимая в движение гайка 184 представляет собой часть башмака 10. Винт 186 заходит по резьбе в гайку 184 и может совершать вращение по отношению к башмаку 190 посредством коленчатой рукоятки 192. Линейное движение винта 186 по отношению к башмаку 190 будет предотвращено посредством стопора 188 опорного узла 194. Для большинства существующих автомобильных домкратов, в которых используют треугольные кинематические механизмы, характерно то, что начало работы ими сильно затруднено, когда они полностью сжаты. В настоящем изобретении эта проблема решена. Как разъяснено применительно к фигурам 1 и 2, осевая сила, требуемая в изобретении, фактически постоянна. Таким образом сила вращения, которая должна быть приложена к коленчатой рукоятке 192, чтобы поднять груз, также будет постоянной и поэтому домкрат легко сможет начать работу из сжатого положения.
Другой вариант осуществления изобретения, который может быть использован для подъема груза в одном направлении посредством приложения силы в перпендикулярном направлении, показан на фигуре 12. Согласно фигуре 12 исполнительный механизм 200, который создает силу Fa, используют для подъема груза 202, который воздействует в нижнем направлении с силой Fr. Как видно на этой фигуре, плечо 2 может быть выдвинуто за место расположения шарнира или оси 6, которая соединяет два плеча 2 рычажного механизма в шарнирном узле. Это не меняет принцип, согласно которому действует изобретение, и вновь демонстрирует гибкость изобретения. Добавление дополнительных рычажных механизмов 204, подсоединенных в местах нахождения пальцев 206 и 208, не изменяет принцип работы изобретения. Квалифицированные специалисты в этой отрасли легко поймут, что в пределах объема изобретения может быть сконструировано большое разнообразие механизмов и устройств, предназначенных для различного промышленного применения.
Хотя допустимо выполнение разнообразных модификаций и альтернативных форм изобретения, здесь в качестве примера показаны на фигурах и подробно описаны конкретные варианты его осуществления. Однако следует иметь в виду, что приведенное здесь описание конкретных вариантов конструкции не предназначено для ограничения изобретения конкретными раскрытыми формами, напротив, предполагается, что изобретение охватывает все модификации, эквиваленты и альтернативные варианты, находящиеся в объеме патентных притязаний изобретения, который определен прилагаемыми пунктами формулы изобретения.
Группа изобретений относится к механизмам, в которых применяют силу, прилагаемую в одном направлении для подъема или удержания нагрузки в направлении, перпендикулярном направлению прилагаемой силы. Такие механизмы могут быть использованы в центраторах, каверномерах, устройствах, обеспечивающих зацепление, тяговых устройствах и подъемных устройствах. Обеспечивает возможность применения механизма в различных устройствах, расширение диапазона радиального расширения. Механизм содержит пару деталей, передающих силу и выполненных с возможностью относительного линейного перемещения, и рычажный механизм, воспринимающий силу и имеющий элемент, подвижный в направлении, перпендикулярном перемещению пары деталей, передающих силу. Рычажный механизм имеет направляющую для преобразования линейного перемещения пары деталей, передающих силу, в выдвижение и отведение рычажного механизма. Направляющая выполнена в форме клина, который составляет единое целое с плечом рычажного механизма, причем направляющая поверхность клина взаимодействует с колесом, являющимся частью детали для передачи силы. 5 н.п. ф-лы, 12 ил.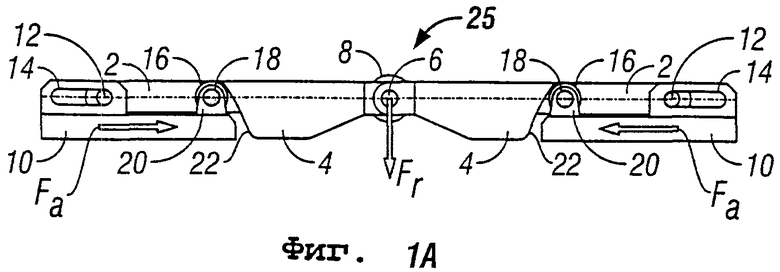
| Центрирующее устройство | 1979 |
|
SU794174A1 |
| US 3295604 A1, 10.07.1964 | |||
| Широкодиапазонный каверномер | 1958 |
|
SU118476A1 |
| Управляемый центратор для скважинных приборов | 1984 |
|
SU1273517A1 |
| Каверномер | 1985 |
|
SU1288289A1 |
| US 4830105 A1, 16.05.1989. | |||

