ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к устройству для позиционирования в стволе скважины, измерения его параметров и к способам использования данного устройства. Кроме того, изобретение относится к устройству для выполнения измерений в стволе скважины и к способам выполнения измерений каверномером.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Известны многочисленные способы и приборы для каротажа скважины, предназначенные для получения многих видов скважинных данных. Одним важным аспектом каротажа скважины является физическое выставление прибора в заданном положении относительно ствола скважины. Работа некоторых типов скважинных приборов требует центрирования скважинного прибора в стволе скважины, работа других типов скважинных приборов требует не центрированной установки в заданном положении в стволе скважины, а скважинные приборы других типов предпочтительно работают, находясь в контакте с поверхностью ствола скважины.
Известны устройства для установки скважинного прибора центрально, со смещением относительно центра или в другом предпочтительном положении в стволе скважины. Позиционирующее устройство также может быть использовано для установки скважинного прибора в заданном положении на предпочтительном расстоянии от поверхности периферии ствола скважины или для установки скважинного прибора в заданном положении у периферийной поверхности ствола скважины. Применение позиционирующего устройства может иметь особо важное значение в том случае, когда скважинный прибор чувствителен к отклонению скважинного прибора, смещению скважинного прибора относительно стенки ствола скважины. К известным типам устройств, используемым для позиционирования, относятся соединенные рычаги, пластинчатая пружина, листовая рессора, цилиндрическая винтовая пружина и различные их комбинации.
Позиционирование скважинного прибора в стволе скважины может быть затруднено. Некоторые стволы скважин могут быть неровными после бурения. В других стволах скважин на конфигурацию поверхности ствола скважины может повлиять обрушение, обводнение или вымывание пластов земли. Данные условия приводят к образованию ствола скважины, который не является идеально круглым или однородным. Аналогичным образом, в наклонной скважине ствол скважины отклоняется от равномерно округлого вследствие невертикальной геометрии. Другие стволы скважин, имеющие некруглую периферию, характеризуют как имеющие "короткую (малую) ось" и "длинную (большую) ось". Известные симметричные позиционирующие устройства плохо приспособлены для использования в стволе скважины, имеющем некруглую или неоднородную периферию. Следовательно, устройство, способное обеспечить позиционирование скважинного прибора в некруглом или неоднородном стволе скважины, а также в круглом или однородном стволе скважины, является желательным.
Некоторые скважинные каротажные зонды, такие как выполняющие измерения плотности или микрокаротаж сопротивлений, оснащены дополнительными пружинами для обеспечения контакта измерительных башмаков со стволом скважины. В данных зондах пружины могут быть расположены так, что потенциальная энергия всей системы пружин минимизирована, когда зонд выставлен вдоль "короткой оси" ствола скважины. Однако подобные известные системы имеют ограничения, поскольку они являются нерегулируемыми, а также не обеспечивают возможности мониторинга эксплуатационных характеристик системы или контактного давления.
При выполнении каротажа (геофизических исследований) в стволе скважины целесообразно знать диаметр и конфигурацию ствола скважины. Известны способы определения диаметра ствола скважины посредством обработки и интерпретации данных, полученных каротажными зондами, или посредством определения диаметра ствола скважины исходя из такой информации, как диаметр бурового долота, скорость бурения, давление текучих сред и ожидаемые параметры пласта. Однако данные способы обеспечивают оценку, а не прямое измерение. Известно прямое (непосредственное) измерение диаметра ствола скважины посредством использования механических или акустических каверномеров. Но расходы и усилия, необходимые для проведения каротажа ствола скважины посредством отдельного каверномера, не обеспечивают надлежащей отдачи. Позиционирующее устройство, которое может обеспечить прямые измерения ствола скважины во время работы каротажного зонда, обеспечит эксплуатационные преимущества.
При выполнении геофизических исследований в скважинах с использованием нескольких каротажных зондов, расположенных в стволе скважины на одной и той же колонне с приборами, для некоторых скважинных приборов может потребоваться центрирование, в то время как для других скважинных приборов может потребоваться предпочтительное выставление в другом положении в стволе скважины. В других ситуациях может быть желательно выполнить каротаж скважины более одного раза посредством использования одного и того же скважинного прибора при его выставлении в разных заданных положениях в стволе скважины. Для работ, выполняемых на буровой площадке, было бы целесообразно, если бы одно и то же устройство можно было бы выполнить с конфигурацией, позволяющей обеспечить выставление каротажного зонда в различных предпочтительных заданных положениях в стволе скважины, и использовать для этих целей. Для работы было бы предпочтительно, если бы можно было использовать множество одинаковых позиционирующих устройств для установки множества скважинных приборов в заданном положении в колонне с приборами. Было бы особенно целесообразно, если бы одно из множества позиционирующих устройство можно было бы выполнить с конфигурацией, позволяющей центрировать скважинный прибор, в то время как другое из множества позиционирующих устройств можно было бы выполнить с конфигурацией, позволяющей устанавливать другой скважинный прибор со смещением от центра в стволе скважины. Необходимо позиционирующее устройство, которое может быть конфигурировано и использовано гибким образом для обеспечения заданного позиционирования в стволе скважины.
В наклонных скважинах надлежащее выставление скважинного прибора в стволе скважины может быть особенно затруднено, поскольку форма ствола скважины, как правило, отклоняется от равномерно округлой вследствие его невертикальной геометрии. Кроме того, в наклонном стволе скважины масса самого скважинного прибора вызывает тенденцию к установке скважинного прибора в нецентральном положении. Известные устройства для симметричного позиционирования плохо приспособлены для использования в невертикальных скважинах. Таким образом, устройство, способное обеспечить позиционирование скважинного прибора в круглом или некруглом стволе скважины, является желательным.
Известно устройство для позиционирования в стволе скважины, содержащее корпус, множество рычагов, каждый из которых выполнен с возможностью его независимого выдвигания и независимого отвода, толкатель, соединенный с каждым рычагом и находящийся в рабочем контакте с подпружиненным листом, и упругий пружинный механизм, контактирующий одним концом с подпружиненным листом (см. патент США 2946130 от 26.07.1960).
Известно устройство для позиционирования в стволе скважины, которое содержит удлиненный корпус, множество рычагов, каждый из которых присоединен к отдельному толкателю, приводную штангу, двигатель, выполненный с возможностью сообщения усилия приводной штанге, и, по меньшей мере, один первый упругий пружинный механизм, находящийся в рабочем контакте с приводной штангой и способный воздействовать на, по меньшей мере, один толкатель (см. Европейский патент 0452044 от 16.10.1991).
Известен скважинный каверномер, содержащий удлиненный корпус, приводную штангу, двигатель, способный сообщать усилие приводной штанге, и множество рычажных систем, каждая из которых содержит рычаг, выполненный с возможностью выдвигания его наружу из корпуса и присоединенный с возможностью поворота к толкателю (см. Европейский патент 0452044 от 16.10.1991).
Известен способ позиционирования скважинного инструмента в стволе скважины, включающий в себя размещение в стволе скважины инструмента, имеющего удлиненный корпус, множество рычагов, каждый из которых присоединен к отдельному толкателю, приводную штангу, двигатель, выполненный с возможностью сообщения усилия приводной штанге, и, по меньшей мере, один упругий пружинный механизм, находящийся в рабочем контакте с приводной штангой и способный воздействовать на, по меньшей мере, один толкатель, приведение в действие двигателя для перемещения приводной штанги с целью ввода ее в рабочий контакт с, по меньшей мере, одним толкателем, перемещение, по меньшей мере, одного толкателя для выдвигания, по меньшей мере, одного рычага для контакта с поверхностью ствола скважины (см. Европейский патент 0452044 от 16.10.1991).
Известен способ измерения ствола скважины, включающий в себя размещение в стволе скважины скважинного устройства, содержащего удлиненный корпус, множество рычажных систем, каждая из которых содержит рычаг, выполненный с возможностью выдвигания его наружу из корпуса устройства и присоединенный с возможностью поворота к толкателю, контактирующему с датчиком, определение отдельно исходного положения каждого рычага посредством использования датчика и создание таким образом сигнала исходного положения для каждого рычага, выдвигание рычагов для ввода их в контакт с поверхностью ствола скважины, определение отдельно выдвинутого положения каждого рычага посредством использования датчика, создание сигнала выдвинутого положения для каждого рычага, обработка сигналов исходного положения и сигналов выдвинутого положения для измерения параметров поверхности ствола скважины (см. авторское свидетельство СССР 771330 от 15.10.1980).
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Согласно изобретению создано устройство для позиционирования в стволе скважины, содержащее корпус, множество рычагов, каждый из которых выполнен с возможностью его независимого выдвигания и независимого отвода, толкатель, соединенный с каждым рычагом и находящийся в рабочем контакте с подпружиненным листом, и первый упругий пружинный механизм, контактирующий одним концом с подпружиненным листом, и, по меньшей мере, один второй упругий пружинный механизм, находящийся в рабочем контакте с толкателем и имеющий зафиксированный конец.
Первый упругий пружинный механизм может представлять собой цилиндрическую винтовую пружину.
По меньшей мере, один второй упругий пружинный механизм может представлять собой цилиндрическую винтовую пружину.
Устройство может дополнительно содержать, по меньшей мере, один датчик положения, приспособленный определять положение, по меньшей мере, одного толкателя.
Устройство может дополнительно содержать упоры для регулирования выдвигания рычагов.
Устройство может дополнительно содержать, по меньшей мере, один датчик, расположенный на конце, по меньшей мере, одного рычага, который может представлять собой датчик силы. Устройство может дополнительно содержать систему управления, предназначенную для автоматического регулирования положения рычага на основе измерений, выполненных датчиком силы.
Устройство может дополнительно содержать закрывающий механизм, который может представлять собой соединительную раму, соединительный рычаг, пластинчатую пружину или листовую рессору.
Устройство может дополнительно содержать датчик относительного азимута.
Согласно другому варианту выполнения устройство для позиционирования в стволе скважины содержит корпус, множество рычагов, каждый из которых выполнен с возможностью его независимого выдвигания и независимого отвода, толкатель, соединенный с каждым рычагом и находящийся в рабочем контакте с подпружиненным листом, упругий пружинный механизм, контактирующий одним концом с подпружиненным листом, и множество упоров для независимого регулирования выдвигания рычагов.
Подпружиненный лист может содержать ориентирующий паз, и толкатель содержит штифт, способный проходить через ориентирующий паз при повороте толкателя для выравнивания штифта относительно паза и не проходить через паз при повороте толкателя и не выравнивать штифт относительно паза.
Согласно еще одному варианту выполнения устройство для позиционирования в стволе скважины содержит корпус, множество рычагов, каждый из которых выполнен с возможностью его независимого выдвигания и независимого отвода, толкатель, соединенный с каждым рычагом и находящийся в рабочем контакте с подпружиненным листом, упругий пружинный механизм, контактирующий одним концом с подпружиненным листом, и механизм быстрого закрытия и открытия.
Механизм быстрого закрытия и открытия может содержать, по меньшей мере, один рычаг, присоединенный к опоре с возможностью поворота, и противоположный толкатель, предназначенный для перемещения рычага вокруг оси поворота, при этом механизм быстрого закрытия и открытия способен воздействовать на, по меньшей мере, один рычаг.
Толкатель может быть расположен на свободном конце опоры.
Устройство может дополнительно содержать упругий вспомогательный пружинный механизм, находящийся в рабочем контакте с толкателем и имеющий зафиксированный конец, который может быть прикреплен к подпружиненному листу, выполненному с возможностью регулирования его положения. Подпружиненный лист, выполненный с возможностью регулирования его положения, может находиться в рабочем контакте с приводной штангой.
Согласно еще одному варианту выполнения устройство для позиционирования в стволе скважины содержит корпус, первый рычаг, соединенный с первым толкателем, находящимся в рабочем контакте с первым подпружиненным листом, второй рычаг, соединенный со вторым толкателем, находящимся в рабочем контакте со вторым подпружиненным листом, и упругий пружинный механизм, при этом первый подпружиненный лист контактирует с одним концом упругого пружинного механизма и второй подпружиненный лист контактирует с противоположным концом упругого пружинного механизма.
Устройство может дополнительно содержать упругий вспомогательный пружинный механизм, находящийся в рабочем контакте с, по меньшей мере, одним из первого или второго толкателя, и имеющий зафиксированный конец, который может быть прикреплен к подпружиненному листу, выполненному с возможностью регулирования его положения.
Подпружиненный лист, выполненный с возможностью регулирования его положения, может находиться в рабочем контакте с приводной штангой.
Двигатель может приводить в движение реверсивный шариковый винт для перемещения шариковой гайки в рабочий контакт с подпружиненным листом для сжатия или отпускания вспомогательного пружинного механизма.
Устройство может содержать два первых рычага, работающих как первая пара, и дополнительно содержать два вторых рычага, работающих как вторая пара.
Устройство может содержать по меньшей мере один механизм быстрого закрытия и открытия, который может содержать, по меньшей мере, один рычаг, присоединенный к опоре с возможностью поворота, и противоположный толкатель, предназначенный для перемещения рычага вокруг оси поворота, при этом механизм быстрого закрытия и открытия способен воздействовать на, по меньшей мере, один рычаг.
Толкатель может быть расположен на свободном конце опоры.
Устройство может дополнительно содержать множество упоров для независимого регулирования выдвигания рычагов.
Подпружиненный лист может содержать ориентирующий паз, и толкатель содержит штифт, при этом штифт способен проходить через ориентирующий паз при повороте толкателя для выравнивания штифта относительно паза и не проходить через паз при повороте толкателя и не выравнивать штифт относительно паза.
Согласно еще одному варианту выполнения устройство для позиционирования в стволе скважины содержит удлиненный корпус, множество рычагов, каждый из которых присоединен к отдельному толкателю, приводную штангу, содержащую соединительный стержень и соединительный элемент, двигатель, выполненный с возможностью сообщения усилия приводной штанге, и, по меньшей мере, один первый упругий пружинный механизм, находящийся в рабочем контакте с приводной штангой и способный воздействовать на, по меньшей мере, один толкатель.
Устройство может дополнительно содержать, по меньшей мере, один второй упругий пружинный механизм, находящийся в рабочем контакте с толкателем, и имеющий зафиксированный конец.
Пружинные механизмы могут быть цилиндрическими винтовыми пружинами.
Первый упругий пружинный механизм может воздействовать на, по меньшей мере, один толкатель посредством рабочего контакта с подпружиненным листом.
Устройство может дополнительно содержать, по меньшей мере, один датчик положения, способный определять положение, по меньшей мере, одного толкателя.
Устройство может дополнительно содержать упоры для регулирования выдвигания рычагов.
Устройство может дополнительно содержать множество упоров для независимого регулирования выдвигания каждого рычага.
Устройство может дополнительно содержать, по меньшей мере, один датчик, расположенный на конце, по меньшей мере, одного рычага, который может представлять собой датчик силы.
Устройство может дополнительно содержать систему управления, предназначенную для автоматического регулирования положения рычага на основе измерений, выполненных датчиком силы.
Устройство может дополнительно содержать закрывающий механизм, который может представлять собой рамную конструкцию из соединительных звеньев, соединительный рычаг, пластинчатую пружину или листовую рессору.
Устройство может дополнительно содержать, по меньшей мере, один механизм быстрого закрытия и открытия.
Устройство может дополнительно содержать датчик относительного азимута.
По меньшей мере, один толкатель может находиться в рабочем контакте с приводной штангой и не находиться в рабочем контакте с приводной штангой.
Подпружиненный лист может содержать ориентирующий паз, и толкатель содержит штифт, при этом штифт способен проходить через ориентирующий паз при повороте толкателя для выравнивания штифта относительно паза и не проходить через паз при повороте толкателя и не выравнивать штифт относительно паза.
Устройство может дополнительно содержать по меньшей мере один механизм быстрого закрытия и открытия, который может содержать, по меньшей мере, один рычаг, присоединенный к опоре с возможностью поворота, и противоположный толкатель, предназначенный для перемещения рычага вокруг оси поворота, при этом механизм быстрого закрытия расположен с возможностью воздействия на, по меньшей мере, один рычаг.
Толкатель может быть расположен на свободном конце опоры. Устройство может дополнительно содержать упругий вспомогательный пружинный механизм, находящийся в рабочем контакте с отдельным толкателем и имеющий зафиксированный конец, который может быть прикреплен к подпружиненному листу, выполненному с возможностью регулирования его положения. Подпружиненный лист, выполненный с возможностью регулирования его положения, может находиться в рабочем контакте с приводной штангой.
Согласно изобретению создан скважинный каверномер, содержащий удлиненный корпус, приводную штангу, двигатель, способный сообщать усилие приводной штанге, и множество рычажных систем, каждая из которых содержит рычаг, выполненный с возможностью выдвигания его наружу из корпуса и присоединенный с возможностью поворота к толкателю, контактирующему с датчиком, и упругий пружинный механизм, способный воздействовать на толкатель и находящийся в рабочем контакте с приводной штангой.
Упругий пружинный механизм может быть цилиндрической винтовой пружиной.
Датчик может представлять собой датчик положения, который может быть линейным потенциометром или линейно-регулируемым дифференциальным измерительным преобразователем.
Каверномер может дополнительно содержать, по меньшей мере, один датчик, расположенный на конце, по меньшей мере, одного рычага, который может представлять собой датчик силы.
Каверномер может выполнять регистрацию измерений датчиком в зависимости от глубины.
Каверномер может дополнительно содержать закрывающий механизм, который может представлять собой соединительную раму, соединительный рычаг, пластинчатую пружину или листовую рессору.
Каверномер может дополнительно содержать по меньшей мере один механизм быстрого закрытия и открытия.
Каверномер может дополнительно содержать датчик относительного азимута и может выполнять регистрацию измерений датчиком относительного азимута в зависимости от глубины.
Согласно изобретению создано устройство, предназначенное для использования в стволе скважины, содержащее множество рычагов, и механизм быстрого закрытия и открытия, имеющий, по меньшей мере, один рычаг, присоединенный к опоре с возможностью поворота, и противоположный толкатель, предназначенный для перемещения рычага вокруг оси поворота, при этом механизм быстрого закрытия и открытия способен воздействовать на, по меньшей мере, один рычаг.
Согласно изобретению создан способ позиционирования скважинного инструмента в стволе скважины, включающий в себя следующие операции:
размещение в стволе скважины инструмента, имеющего удлиненный корпус, множество рычагов, каждый из которых присоединен к отдельному толкателю, приводную штангу, содержащую соединительный стержень и соединительный элемент, двигатель, выполненный с возможностью сообщения усилия приводной штанге, и, по меньшей мере, один упругий пружинный механизм, находящийся в рабочем контакте с приводной штангой и способный воздействовать на, по меньшей мере, один толкатель,
приведение в действие двигателя для перемещения приводной штанги с целью ввода ее в рабочий контакт с, по меньшей мере, одним толкателем;
перемещение, по меньшей мере, одного толкателя для выдвигания, по меньшей мере, одного рычага для контакта с поверхностью ствола скважины.
Согласно изобретению создан также способ измерения ствола скважины, включающий в себя следующие операции:
размещение в стволе скважины скважинного устройства, содержащего удлиненный корпус, приводную штангу, имеющую соединительный стержень и соединительный элемент двигатель, способный сообщать усилие приводной штанге, и множество рычажных систем, каждая из которых содержит рычаг, выполненный с возможностью выдвигания его наружу из корпуса устройства и присоединенный с возможностью поворота к толкателю, контактирующему с датчиком, и упругий пружинный механизм, способный воздействовать на толкатель и находящийся в рабочем контакте с приводной штангой;
определение отдельно исходного положения каждого рычага посредством использования датчика и создание таким образом сигнала исходного положения для каждого рычага;
выдвигание рычагов для ввода их в контакт с поверхностью ствола скважины;
определение отдельно выдвинутого положения каждого рычага посредством использования датчика;
создание сигнала выдвинутого положения для каждого рычага;
обработку сигналов исходного положения и сигналов выдвинутого положения для измерения параметров поверхности ствола скважины.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Преимущества настоящего изобретения станут очевидными из нижеприведенного описания сопровождающих чертежей. Следует понимать, что чертежи должны использоваться только для иллюстрации, и их не следует рассматривать как определение объема изобретения или ограничение его объема.
Фиг.1а и 1b показывают вариант осуществления позиционирующего устройства по настоящему изобретению.
Фиг.2 показывает компактный вариант осуществления настоящего изобретения, содержащий вспомогательные пружины.
Фиг.3а и 3b показывают другой компактный вариант осуществления позиционирующего устройства.
Фиг.4а показывает регулируемый вариант осуществления настоящего изобретения.
Фиг.4b иллюстрирует дополнительный вариант осуществления позиционирующего устройства по фиг.4а.
Фиг.5а-5d иллюстрируют вариант осуществления настоящего изобретения с приводным двигателем.
Фиг.6 показывает другой вариант осуществления настоящего изобретения с приводным двигателем.
Фиг.7а-7с иллюстрируют механизм быстрого расцепления, пригодный для использования в настоящем изобретении.
Фиг.8 показывает вариант осуществления настоящего изобретения, расположенный в стволе скважины.
Фиг.9а-9d иллюстрируют применение нескольких позиционирующих устройств по настоящему изобретению в скважинной каротажной системе.
На всех чертежах идентичные ссылочные позиции и описания обозначают аналогичные, но не обязательно идентичные элементы. Несмотря на то, что изобретение допускает выполнение различных модификаций и альтернативных вариантов осуществления, определенные варианты осуществления были показаны в качестве примера на чертежах и будут здесь описаны подробно. Тем не менее, следует понимать, что изобретение не должно быть ограничено определенными раскрытыми вариантами. Скорее, изобретение должно охватывать все модификации, эквиваленты и альтернативы, находящиеся в пределах объема изобретения, определенного приложенной формулой изобретения.
ПОДРОБНОЕ ОПИСАНИЕ
На фиг.1а позиционирующее устройство 10 содержит рычаг 20а, присоединенный к толкателю 30а, и рычаг 20b, присоединенный к толкателю 30b. Толкатели 30а и 30b контактируют с подпружиненным листом 50, который контактирует с одним концом упругого пружинного механизма 40. Одним типом пригодного упругого пружинного механизма является цилиндрическая винтовая пружина. Другой конец пружины 40 зафиксирован. В используемом здесь смысле термин "зафиксированный" относится к элементу, удерживаемому от перемещения, при этом к примерам того, как происходит данное удерживание [фиксация, ограничение], относятся закрепление на месте или примыкание к неподвижной конструкции, подобной той, которая проиллюстрирована упором 34, но возможные варианты осуществления удерживания от перемещения не ограничены вышеуказанными. В показанной конфигурации рычаги 20а и 20b выдвинуты, когда пружина 40 находится в своем нейтральном состоянии, или в некоторых вариантах осуществления выдвинуты, когда пружина 40 предусмотрена в предварительно сжатом состоянии. Во время размещения в скважине выдвинутые рычаги 20а и 20b контактируют с периметральными (окружными) поверхностями ствола скважины. Рычаг 20а поворачивается вокруг оси 32а поворота (точки опоры рычага) и обеспечивает перемещение толкателя 30а через посредство соединителя 28а. Рычаг 20b поворачивается вокруг оси 32b поворота и обеспечивает перемещение толкателя 30b через посредство соединителя 28b. Усилие, приложенное к рычагам 20а, 20b за счет их контакта со стенкой ствола скважины, вызывает смещение толкателей 30а, 30b и через посредство подпружиненного листа 50 передается пружине 40. Когда контактные усилия превысят упругость пружины 40, пружина 40 сжимается и рычаг 20а, 20b отводится с поворотом его вокруг соответствующей оси 32а, 32b поворота по направлению к корпусу 14 устройства. В данной конфигурации рычаги 20а и 20b отводятся и выдвигаются как пара. Рычаги 20с и 20d, показанные на фиг.1b, установлены в ориентированном положении, комплементарном по отношению к рычагам 20а и 20b. Одна приведенная в качестве примера ориентация показана на фиг.1b, при этом пара рычагов 20с и 20d расположена ортогонально к паре рычагов 20а и 20b. Пара рычагов 20с и 20d функционирует аналогично паре рычагов 20а, 20b. Исходно рычаги 20с и 20d выдвинуты, и пружина 41 находится в ее нейтральном состоянии. Пружины 40 и 41 могут иметь одинаковые или разные значения жесткости пружины. Когда рычаг 20с контактирует с периметральной поверхностью ствола скважины, контактное усилие передается упругому пружинному механизму 41 посредством подпружиненного листа 51, толкаемого толкателем 30с, при этом усилие передается вокруг оси 32с поворота толкателю 30с посредством соединителя 28с. Когда рычаг 20d контактирует с периметральной поверхностью ствола скважины, контактное усилие передается пружине 41 посредством подпружиненного листа 51, толкаемого толкателем 30d, при этом усилие передается от рычага 20d вокруг оси 32d поворота толкателю 30d через посредство соединителя 28d. Каждая пара рычагов 20а, 20b и пара рычагов 20с, 20d может выдвигаться или отводиться независимо от другой пары рычагов. Следует отметить, что в используемом здесь смысле термины "отводить", "отводимый" относятся к элементам, которые выполнены с возможностью отвода (втягивания) под действием сил, внешних по отношению к устройству, например, под действием усилия отталкивания от стенки ствола скважины. Пара 20а, 20b рычагов и пара 20с, 20d рычагов могут быть выдвинуты на одинаковое или разное расстояние наружу от корпуса устройства. В некоторых вариантах осуществления и для некоторых применений, таких как центрирование, может быть предпочтительным использование пружин 40 и 41, которые имеют одинаковые или схожие значения жесткости пружины. В других вариантах осуществления, например, при применении в стволах скважин с "короткой осью", может быть предпочтительным применение пружин 40 и 41, которые имеют разные значения жесткости пружины.
При размещении скважинного прибора в некруглом стволе скважины данный прибор стремится остаться в положении, выровненном относительно "длинной оси" ствола скважины. Данная "длинная ось", вероятно, будет неровной и "складчатой"; для данных, полученных из измерений вдоль подобной "длинной оси", характерна тенденция быть данными более низкого качества. Методика, известная как "каротаж по короткой оси", может быть использована в некруглых стволах скважин. Когда стенка ствола скважины имеет тенденцию быть довольно гладкой в зоне короткой оси ствола скважины, скважинный прибор, выровненный относительно "короткой оси", как правило, будет обеспечивать измерения лучшего качества, чем скважинный прибор, выровненный относительно "длинной оси". Для обеспечения контакта башмаков скважинных каротажных зондов, таких как те, которые позволяют получить диаграмму плотностного каротажа или диаграмму микрокаротажа сопротивления, при "короткой оси", зонды ранее оснащались дополнительными пружинами, расположенными так, что потенциальная энергия всей системы пружин минимизируется при выравнивании зонда вдоль "короткой оси". Однако эксплуатационный недостаток подобных систем заключается в том, что их нельзя регулировать, а также нельзя осуществлять мониторинг эксплуатационных характеристик подобной системы в стволе скважины.
Следует отметить, что, несмотря на то, что в некоторых вариантах осуществления, описанных здесь, проиллюстрированы два рычага, в пределах объема изобретения безусловно предусмотрено применение двух или более рычагов. Кроме того, несмотря на то, что позиционирующее устройство проиллюстрировано в отдельном корпусе 14 устройства, также предусмотрено в пределах объема данного изобретения выполнение позиционирующего устройства в общем корпусе размещаемого скважинного прибора и без отдельного корпуса, окружающего только позиционирующее устройство.
Как показано на фиг.2, другой вариант осуществления позиционирующего устройства 10 содержит упругие смещающие средства 70а, 70b, расположенные на толкателях 30а, 30b, присоединенных к рычагам 20а, 20b. К пригодным типам упругих смещающих средств относятся вспомогательные пружины, цилиндрические винтовые пружины и тарельчатые пружины. Посредством выполнения ненагруженных пружин с длинами, сопоставимыми с их длинами при сжатии при максимальном контактном усилии, контактные усилия для всех рычагов могут быть аналогичными даже для различающихся в широких пределах величин выдвигания рычагов, таких, какие, как правило, имеют место при внецентренном размещении скважинного прибора. В данном варианте осуществления рычаги 20а и 20b являются независимыми друг от друга и не отводятся и не выдвигаются как пара. Вспомогательные пружины 70а и 70b могут иметь одинаковые или разные значения жесткости пружины. Когда рычаг 20а контактирует с периметральной поверхностью ствола скважины, давление, действующее на рычаг 20а, передается вокруг оси 32а поворота толкателю 30а через посредство соединителя 28а, что вызывает перемещение толкателя 30а. Перемещению толкателя 30а противодействует вспомогательная пружина 70а. Вспомогательная пружина 70а ограничена зафиксированной концевой пластиной 75а. В некоторых вариантах осуществления местоположение концевой пластины 75а фиксируют посредством использования подвижных штифтов, в результате чего обеспечивается возможность регулирования местоположения концевой пластины 75а для сжатия или отпускания вспомогательной пружины 70а.
Всякий раз, когда контактное усилие, действующее на рычаг 20а, будет меньше жесткости вспомогательной пружины 70а, штанга 30а не будет контактировать с подпружиненным листом 50. Когда контактное давление, действующее на рычаг 20а, превышает жесткость, обеспечиваемую вспомогательной пружиной 70а, штанга 30а смещается с вводом ее в контакт с подпружиненным листом 50, и подпружиненный лист 50 перемещается для сжатия упругого пружинного механизма 40. Подпружиненный лист 42 находится в контакте с резьбовым штифтом 44. Резьбовой штифт 44 можно регулировать для поджима подпружиненного листа 42 с целью сжатия упругого пружинного механизма 40, или резьбовой штифт 44 можно регулировать для обеспечения возможности отвода подпружиненного листа 42 от упругого пружинного механизма 40, в результате чего обеспечивается возможность удлинения упругого пружинного механизма 40.
Когда рычаг 20b контактирует с периметральной поверхностью ствола скважины, давление, действующее на рычаг 20b, передается вокруг оси 32b поворота толкателя 30b посредством соединителя 28b, что вызывает перемещение толкателя 30b. Перемещению толкателя 30b противодействует вспомогательная пружина 70b. Вспомогательная пружина 70b удерживается зафиксированной концевой пластиной 75b. В некоторых вариантах осуществления местоположение концевой пластины 75b фиксируют посредством использования подвижных штифтов, в результате чего обеспечивается возможность регулирования местоположения концевой пластины 75b для сжатия или отпускания вспомогательной пружины 70b.
Когда контактное усилие, действующее на рычаг 20b, будет меньше жесткости вспомогательной пружины 70b, толкатель 30b не будет контактировать с подпружиненным листом 50. Когда контактное давление, действующее на рычаг 20b, превышает жесткость, обеспечиваемую вспомогательной пружиной 70b, толкатель 30b смещается с вводом ее в контакт с подпружиненным листом 50, и подпружиненный лист 50 перемещается для сжатия пружины 40. Если ни толкатель 30а, ни толкатель 30b не контактирует с подпружиненным листом 50, пружина 40 находится в нейтральном положении, и подпружиненный лист 50 будет приблизительно перпендикулярным оси пружины 40. В некоторых вариантах осуществления пружина 40 может быть размещена в позиционирующем устройстве 10 в предварительно сжатом состоянии и установлена так, что подпружиненный лист 50 будет оставаться в постоянном контакте с одним или с двумя толкателями 30а, 30b. Таким образом один или более рычагов 20а, 20b могут быть размещены в выдвинутом наружу положении, при этом степень предварительного сжатия пружины влияет на величину выдвигания рычагов наружу. В данной конфигурации предварительно сжатая пружина 40 воздействует с усилием через посредство подпружиненного листа 50 или на один, или на несколько толкателей 30а, 30b для выдвигания или одного, или нескольких рычагов 20а, 20b. Когда контактное усилие, действующее на рычаг 20а, превышает жесткость, обеспечиваемую вспомогательной пружиной 70а, и давление, действующее на рычаг 20b, превышает жесткость, обеспечиваемую вспомогательной пружиной 70b, на приблизительно одну и ту же величину, толкатели 30а и 30b будут толкать подпружиненный лист 50 приблизительно одинаково, и подпружиненный лист будет оставаться приблизительно перпендикулярным к оси упругого пружинного механизма 40. Сжатие пружины 40 является приблизительно равномерным, и усилие, обусловленное жесткостью пружины 40, будет приложено приблизительно одинаковым образом по всему подпружиненному листу 50. В результате сила сопротивления будет приложена приблизительно одинаково к рычагам 20а, 20b через толкатели 30а, 30b, находящиеся в контакте с подпружиненным листом 50. Рычаги 20а, 20b выдвигаются или отводятся приблизительно одинаковым образом.
Когда контактное усилие, действующее на рычаг 20b, превышает жесткость вспомогательной пружины 70b, но давление, действующее на рычаг 20а, не превышает жесткости вспомогательной пружины 70а, только толкатель 30b будет обеспечивать приложение усилия к подпружиненному листу 50. Подпружиненный лист 50 сжимает пружину 40, и рычаг 20b отводится. Когда контактное усилие, действующее на рычаг 20а, превышает жесткость вспомогательной пружины 70а, и контактное усилие, действующее на рычаг 20b, превышает жесткость вспомогательной пружины 70b, но контактные усилия не являются приблизительно равными, толкатели 30а и 30b обеспечивают приложение разных усилий к подпружиненному листу 50. Пружина 40 сжимается неравномерно, и подпружиненный лист 50 не остается приблизительно перпендикулярным к оси пружины 40. Если предположить, что большее усилие действует со стороны толкателя 30а, то очевидно, что часть пружины 40 сжатия, находящаяся вблизи штанги 30а, будет сжиматься в большей степени, что вызовет наклон подпружиненного листа 50 по направлению к толкателю 30b. В ответ на сжатие пружины 40 и смещение подпружиненного листа 50 рычаг 20а отводится.
Когда каждое из контактных усилий, действующих на рычаги 20а, 20b, превышает жесткость соответствующих вспомогательных пружин 70а, 70b, оба толкателя 30а и 30b обеспечивают приложение усилий к подпружиненному листу 50 для сжатия пружины 40. Несмотря на то, что на фиг.2 для удобства показана пара противоположных рычагов, следует понимать, что в данном варианте осуществления может быть использовано множество рычагов, при этом каждый рычаг будет функционировать так, как было описано раньше для рычагов 20а и 20b.
Ясно, что настоящее изобретение может быть выполнено с конфигурацией, в которой предусмотрены упругие смещающие средства, имеющие одинаковую или разную жесткость. В одном случае вспомогательные пружины могут иметь одинаковую жесткость, так что толкатели каждого рычага будут контактировать с подпружиненным листом, когда одинаковое усилие будет приложено к каждому рычагу. Альтернативно, могут быть использованы вспомогательные пружины с разными значениями жесткости пружины, так что контакт толкателя с подпружиненным листом будет иметь место при разных усилиях для разных рычагов. Аналогичным образом, настоящее изобретение может быть предусмотрено с меняющимися различиями в жесткости между упругими смещающими средствами и упругим пружинным механизмом. Кроме того, подобные конфигурации могут быть применимы в особенности тогда, когда позиционирующее устройство 10 размещают в наклонном или невертикальном стволе скважины так, что выбранные рычаги будут выдвинуты наружу более жестко для установки их в заданном положении у стенки ствола скважины, в то время как другие рычаги выполнены с конфигурацией, позволяющей им перемещаться более свободно, что позволяет данным рычагам оставаться в контакте со стенкой ствола скважины при перемещении позиционирующего устройства в стволе скважины. В некоторых вариантах осуществления один или несколько датчиков могут быть предусмотрены на одном или нескольких рычагах. В особом варианте осуществления датчики размещены на рычагах, выполненных с конфигурацией, позволяющей им более свободно перемещаться вдоль стенки ствола скважины, в результате чего обеспечивается измерение ствола скважины каверномером.
Компактный вариант осуществления позиционирующего устройства, который содержит упругие смещающие средства и две пары рычагов, проиллюстрирован на фиг.3а и 3b. Фиг.3b показывает сечение, выполненное вдоль линии А-А′ на фиг.3а. Как показано на фиг.3а и 3b, рычаги 20а, 20b образуют пару противоположных рычагов, и рычаги 20с, 20d образуют пару противоположных рычагов. Когда рычаг 20а контактирует с периметральной поверхностью ствола скважины, усилие передается вокруг оси 32а поворота, соединенной с соединительным звеном 33а, при этом соединительное звено 33а соединено посредством соединителя со штангой (толкателем) 30а. Когда рычаг 20b контактирует с периметральной поверхностью ствола скважины, усилие передается вокруг оси 32b поворота, соединенной с соединительным звеном 33b, при этом соединительное звено 30b соединено посредством соединителя 28b с толкателем 30b. Толкатели 30а и 30b присоединены к подпружиненному листу 50. Когда пружина 40 сжимается, она давит на подпружиненный лист 51, и на нее воздействует сила сопротивления со стороны подпружиненного листа 51. Перемещение подпружиненного листа 51 в одном направлении ограничено упором 34.
Когда рычаг 20с контактирует с периметральной поверхностью ствола скважины, усилие передается вокруг оси 32с поворота, соединенной с соединительным звеном 33с, при этом соединительное звено 33с соединено посредством соединителя 28с с толкателем 30с. Когда рычаг 20d контактирует с периметральной поверхностью ствола скважины, усилие передается вокруг оси 32d поворота, соединенной с соединительным звеном 33d, при этом соединительное звено 33d соединено посредством соединителя 28d со штангой 30d. Толкатели 30с и 30d присоединены к подпружиненному листу 51; к типам пригодных соединений относятся механические соединители, такие как штифты и болты, и физические соединения, такие как сварные швы и профили. При приложении усилия к рычагам 20с, 20d подпружиненный лист 51 сжимает пружину 40. Когда пружина 40 сжимается, она давит на подпружиненный лист 50. Перемещение подпружиненного листа 50 ограничено в одном направлении упором 35. Таким образом, усилие контакта со стволом скважины, вызывающее отвод одной пары рычагов 20а, 20b, передается посредством перемещения штанг (толкателей) и сжатия пружины 40 для выдвигания другой пары рычагов 20с, 20d в пределах максимальных границ перемещения подпружиненных листов 50 и 51 в пределах перемещения, определяемых расстоянием между упорами 34 и 35. Варианты осуществления настоящего изобретения, подобные проиллюстрированному на фиг.3а и 3b, обеспечивают получение компактного позиционирующего устройства, в котором требуется только одна пружина 40.
Эффективная жесткость пружины 40 может быть увеличена или уменьшена посредством любых способов для регулирования пределов, до которых рычаги 20 выдвигаются или отводятся. Например, может быть предусмотрена пружина с большей или меньшей жесткостью пружины. Другой вариант осуществления предусматривает выполнение реактивных пружин. Дополнительный вариант осуществления содержит регулируемые реактивные пружины.
Фиг.4а показывает еще один вариант осуществления, содержащий пару рычагов 20а и 20b. Рычаг 20а присоединен к толкателю 30а через посредство соединителя 28а, и рычаг 20b присоединен к штанге 30b через посредство соединителя 28b. Оба толкателя 30а и 30b контактируют с подпружиненным листом 50. Реактивная пружина 45 присоединена к обратной стороне подпружиненного листа 50. Реактивная пружина 45 зафиксирована посредством упора 34. Контактное усилие, действующее на рычаг 20а со стороны периметральной поверхности ствола скважины, заставляет толкатель 30а перемещать подпружиненный лист 50 для сжатия пружины 40. Контактное усилие, действующее на рычаг 20b со стороны периметральной поверхности ствола скважины, заставляет штангу 30b перемещать подпружиненный лист 50 для сжатия пружины 40. Перемещению подпружиненного листа 50 и сжатию пружины 40 противодействует реактивная пружина 45. В одном варианте осуществления степень сопротивления перемещению подпружиненного листа 50, обеспечиваемого реактивной пружиной 45, можно регулировать посредством изменения местоположения упора 34, в результате чего осуществляется сжатие или растяжение реактивной пружины 45. В качестве иллюстрации упор 34 может быть перемещен к упору 34′ для растягивания реактивной пружины 45.
На фиг.4b проиллюстрирован дополнительный вариант осуществления изображения, содержащий вторую пару рычагов 20с и 20d. Рычаг 20с соединен с толкателем 30с, и рычаг 20d соединен со штангой 30d. Оба толкателя 30с и 30d контактируют с подпружиненным листом 51. Реактивная пружина 46 присоединена к обратной стороне подпружиненного листа 51. Противоположный конец реактивной пружины 46 зафиксирован посредством упора 35. Контактное усилие, действующее на рычаг 20с со стороны периметральной поверхности ствола скважины, заставляет толкатель 30а смещать подпружиненный лист 51, в результате чего сжимается пружина 40. Контактное усилие, действующее на рычаг 20d со стороны периметральной поверхности ствола скважины, заставляет толкатель 30d смещать подпружиненный лист 51, в результате чего сжимается пружина 40. Перемещению подпружиненного листа 51 и сжатию пружины 40 противодействует реактивная пружина 46. Степень сопротивления перемещению подпружиненного листа 50, обеспечиваемого реактивной пружиной 46, можно регулировать посредством сжатия или растяжения реактивной пружины 46 путем изменения местоположения упора 35. В качестве иллюстрации упор 35 может быть перемещен к упору 35′ для растягивания реактивной пружины 46.
Когда колонну со скважинными приборами перемещают для опускания или подъема в стволе скважины, рычаги 20 могут удерживаться в отведенном положении посредством закрывающего механизма, такого как соединительная рама, соединительный рычаг, пластинчатая пружина или листовая рессора. В пределах объема данного изобретения предусмотрено, что рычаги 20 могут контактировать непосредственно с поверхностью ствола скважины, или рычаги 20 могут контактировать с внутренней поверхностью листовой рессоры или соединительной рамы, при этом наружная поверхность листовой рессоры или рамы контактирует с периметральной поверхностью ствола скважины. Подобные конфигурации возможны в настоящем изобретении и не отходят от его сущности или объема. Также следует отметить, что периметральная поверхность ствола скважины может представлять собой поверхность стенки ствола скважины, обсадной колонны или любого другого элемента, образующего внутреннюю поверхность кольцевого пространства ствола скважины.
На фиг.5а-5d показаны варианты осуществления настоящего изобретения, в которых предусмотрен двигатель 22. На фиг.5а позиционирующее устройство 10 показано с отведенными позиционирующими рычагами 20а, 20b, при этом подобная конфигурация целесообразна, например, при спуске позиционирующего устройства 10 в ствол скважины или извлечении его из ствола скважины. На фиг.5d позиционирующее устройство 10 показано в положении, при котором двигатель 22 работает для полного выдвигания позиционирующих рычагов 20а, 20b. Конфигурации для промежуточного позиционирования между отведенным положением (фиг.5а) и положением полного выдвигания (фиг.5d) показаны на фиг.5b и 5с. На фиг.5b позиционирующие рычаги 20а, 20b показаны выдвинутыми только посредством смещающих средств 71, 72, в то время как на фиг.5с позиционирующие рычаги 20а, 20b показаны выдвинутыми под действием сочетания усилий, действующих со стороны смещающих средств 71, 72 и пружины 40.
В вариантах осуществления, показанных на фиг.5а-5d, реактивная пружина 45 предусмотрена исходно в нейтральном состоянии (с высотой пружины в свободном состоянии) между подпружиненными листами 54 и 50, реактивная пружина 46 предусмотрена исходно в нейтральном состоянии (с высотой пружины в свободном состоянии) между подпружиненными листами 51 и 53, и пружина 40 предусмотрена исходно в предварительно сжатом состоянии с поджимом ее к подпружиненным листам 50 и 51. При использовании состояние реактивных пружин 45, 46 и пружины 40 изменяется в зависимости от функционирования позиционирующего устройства 10. Очевидно, что применение пружин, имеющих различные значения жесткости пружины, или замена пружин пружинами, имеющими другие значения жесткости пружины, для адаптации позиционирующего устройства 10 для применения в скважинах с различными конфигурациями, предусмотрены в пределах объема настоящего изобретения и описания.
На фиг.5а-5d показаны возможные конструкции соединительных рам 80а и 80b. Рычаг 20а является внутренним по отношению к раме 80а и находится в контакте с ней, и рычаг 20b является внутренним по отношению к раме 80b и находится в контакте с ней. В данной конфигурации рамы 80а, 80b выполнены выдвижными для контактирования с периметральной поверхностью ствола скважины. Следует понимать, что настоящее изобретение не требует обязательного использования закрывающих механизмов, таких как рамы 80а, 80b, и в случае их применения любой тип или комбинация подобных закрывающих механизмов может использоваться вместе с настоящим изобретением.
Отдельный рычаг может перемещаться следующим образом. Рычаг 20а присоединен к толкателю 30а, и толкатель 30а проходит до датчика 60а. Датчик 60а определяет относительное положение штанги 30а, тем самым определяя величину, на которую выдвинут или отведен рычаг 20а. К примерам пригодных датчиков относятся линейные потенциометры или линейно-регулируемые дифференциальные измерительные преобразователи. Датчик 60а может служить в качестве упора, когда он отрегулирован для ограничения величины, на которую рычаг может выдвигаться или отводиться. Один конец смещающего средства 71, расположенного над штангой 30а, зафиксирован посредством упора 36, и другой его конец контактирует с концевой пластиной 76. Примером смещающего средства является пружина. В зависимости от того, какой конец зафиксирован, нажатие на смещающее средство 71 может вызвать приложение растягивающего или сжимающего усилия к толкателю 30а. Смещающие средства 71 показаны в виде вспомогательных пружин, хотя применение любых соответствующих смещающих средств предусмотрено в пределах объема изобретения.
Здесь для удобства рычаг, к которому прикладывается растягивающее усилие со стороны смещающего средства 71, назван растягивающим рычагом, и рычаг, к которому прикладывается сжимающее усилие со стороны смещающего средства 71, назван сжимающим рычагом. В качестве примера рычаг 20b показан как сжимающий рычаг. Рычаг 20b присоединен к толкателю 30b. Один конец смещающего средства 72, расположенного над толкателем 30b, зафиксирован посредством упора 37, и другой его конец контактирует с концевой пластиной 77.
Таким образом, рычаги могут быть смещены независимо друг от друга. Следовательно, существует возможность иметь один рычаг, вталкиваемый внутрь окружающим материалом в большей степени, чем другой рычаг. Множество рычагов в данном варианте осуществления может включать в себя любую комбинацию растягивающих и сжимающих рычагов, включая все сжимающие рычаги или все растягивающие рычаги.
На фиг.5а проиллюстрирован вариант осуществления позиционирующего устройства с закрытыми рычагами 20, которое может использоваться при размещении скважинного прибора в стволе скважины или извлечении скважинного прибора из ствола скважины. В конфигурации, показанной на фиг.5а, вспомогательная пружина 71 растяжения обеспечивает приложение растягивающего усилия к толкателю 30а, и вспомогательная пружина 72 сжатия обеспечивает приложение сжимающего усилия к штанге 30b.
Двигатель 22 обеспечивает управление перемещением рычагов между отведенным положением (фиг.5а) и выдвинутым положением (фиг.5d). Двигатель 22 обеспечивает сообщение линейного движения симметричному соединительному стержню 24 с расположенными на нем соединительными элементами 26 и 27, предназначенными для осуществления контакта с подпружиненными листами и образующими со стержнем 24 приводную штангу. Поворот соединительного стержня 24 вызывает прямолинейное движение соединительных элементов 26 и 27. Одним примером одного типа симметричного соединительного стержня является реверсивный шариковый винт, и примером соединительных элементов являются шариковые гайки. Соединительные элементы 26 и 27 установлены на соединительном стержне 24 таким образом, что поворот (вращение) соединительного стержня 24 может вызвать перемещение соединительного элемента 26 с вводом его в контакт с подпружиненным листом 50 или перемещение соединительного элемента 27 с вводом его в контакт с подпружиненным листом 51. Данное усилие, приложенное к подпружиненному листу 50 или 51, в свою очередь, вызывает сжатие или растяжение пружины 40, что приводит к отводу или выдвиганию рычагов 20а и 20b. Датчик 100 (линейно-регулируемый дифференциальный измерительный преобразователь или потенциометр) используется для определения заданного положения гайки.
Далее описан конкретный вариант осуществления, в котором соединительный стержень 24 представляет собой симметричный шариковый винт, и соединительные элементы 26, 27 представляют собой шариковые гайки с внутренним соединением. Когда позиционирующее устройство 10 находится на некоторой глубине в стволе скважины, на которой желательно установить данное устройство, двигатель 22 приводят в действие для приложения крутящего момента к винту 24, имеющему расположенные на нем гайки 26 и 27. Гайка 26 расположена на винте 24 между подпружиненными листами 54 и 50. Пределы перемещения подпружиненного листа 50 ограничены упорами 34 и 34′. Гайка 27 расположена на винте 24 между подпружиненными листами 51 и 53. Пределы перемещения подпружиненного листа 51 ограничены упорами 35 и 35'. Винт 24 простирается вдоль оси пружины 40 и реактивных пружин 45 и 46. Один конец реактивной пружины 45 прикреплен к подпружиненному листу 54, и другой конец реактивной пружины 45 прикреплен к подпружиненному листу 50. Один конец реактивной пружины 46 прикреплен к подпружиненному листу 51, и другой конец реактивной пружины 46 прикреплен к подпружиненному листу 53. Вращение винта 24 посредством двигателя 22 вызывает перемещение гаек 26 и 27.
На фиг.5d проиллюстрирован вариант осуществления, пригодный для размещения позиционирующего устройства по настоящему изобретению в некотором месте в стволе скважины. В показанной конфигурации полного выдвигания гайка 26 расположена рядом с подпружиненным листом 54 у его границы, наиболее удаленной от центра, и обеспечивает смещение подпружиненного листа 50 по направлению к подпружиненному листу 54 до тех пор, пока подпружиненный лист 50 не войдет в контакт с упором 34′, тем самым вызывая растягивание реактивной пружины 45. При выполнении этого подпружиненный лист 50 вызывает растягивание пружины 40. В некоторых вариантах осуществления пружина 40 исходно предварительно сжата, так что пружина 40 будет толкать подпружиненный лист 50 до тех пор, пока подпружиненный лист 50 не войдет контакт с упором 34′ и 35′, когда гайка 27 и 26 обеспечит снятие сжимающей нагрузки, действующей на пружину 40, для отвода рычагов. Следовательно, лист 50 контактирует с упором 34′ с усилием, созданным пружиной 40, до того, как гайка 27 войдет в контакт с листом 54 и "начнет" растягивать пружину 45. До того, как гайка 27 войдет в контакт с листом 54, только пружина 40 будет действовать на штангу (толкатель) рычага. После того, как гайка 27 войдет в контакт с листом 54, пружины 40 и 45 будут действовать на штангу рычага. Гайка 27 расположена рядом с подпружиненным листом 53 у его границы, наиболее удаленной от центра, и обеспечивает смещение подпружиненного листа 51 по направлению к подпружиненному листу 53 до тех пор, пока подпружиненный лист 51 не войдет в контакт с упором 35′, тем самым вызывая растягивание реактивной пружины 46. Рычаг 20а является внутренним по отношению к рамной конструкции 80а из соединительных звеньев и находится в контакте с ней, и выдвигается для контактирования с периметральной поверхностью скважины. Рычаг 20b и рамная конструкция 80b из соединительных звеньев выдвигаются для контактирования с периметральной поверхностью ствола скважины.
Конфигурация позиционирующего устройства 10 с рычагами, выдвинутыми так, как показано на фиг.5d, будет полезной при установке скважинного прибора в заданном положении в стволе скважины. Рычаг 20а присоединен к толкателю 30а, и толкатель 30а простирается до датчика 60а. Датчик 60а определяет относительное положение толкателя 30а, тем самым определяя величину, на которую выдвинут или отведен рычаг 20а. Один конец вспомогательной пружины 71, расположенной над толкателем 30а, зафиксирован посредством упора 36, и другой ее конец контактирует с концевой пластиной 76. Один конец вспомогательной пружины 71 растяжения зафиксирован, и данная пружина может обеспечить приложение растягивающего усилия к толкателю 30а. Рычаг 20b присоединен к толкателю 30b, и толкатель 30b проходит до датчика 60b. Датчик 60b определяет относительное положение штанги 30b, тем самым определяя величину, на которую выдвинут или отведен рычаг 20b. Один конец вспомогательной пружины 72, расположенной над толкателем 30b, зафиксирован посредством упора 37, и другой ее конец контактирует с концевой пластиной 77. Вспомогательная пружина 72 сжатия может обеспечить приложение сжимающего усилия к толкателю 30b.
Вариант осуществления, проиллюстрированный на фиг.5d, показывает позиционирующее устройство 10 в конфигурации, пригодной для центрирования скважинного прибора. Рычаги 20а и 20b выдвинуты приблизительно одинаково. Реактивные пружины 45 и 46 имеют приблизительно одинаковую жесткость. В данной конфигурации все позиционирующее устройство 10 функционирует эффективно. Вспомогательная пружина 71 обеспечивает приложение растягивающего усилия к толкателю 30а и рычагу 20а, и подпружиненный лист 50, показанный рядом с упором 34′, тянет пружину 45 и толкает пружину 40. Вспомогательная пружина 72 обеспечивает приложение сжимающего усилия к толкателю 30b и рычагу 20b, и подпружиненный лист 51, показанный рядом с упором 35′, тянет пружину 46 и толкает пружину 40.
В объем настоящего изобретения включены другие варианты осуществления позиционирующего устройства 10. В одном альтернативном варианте вспомогательная пружина 71 может быть выполнена с конфигурацией, позволяющей ей обеспечить приложение растягивающих усилий к толкателям 30а, и вспомогательная пружина 72 может быть выполнена с конфигурацией, позволяющей ей обеспечить приложение растягивающих усилий к толкателям 30b, или обе вспомогательные пружины могут быть выполнены с конфигурацией, позволяющей им обеспечить приложение сжимающих усилий к соответствующим им толкателям. Реактивные пружины 45 и 46 могут иметь аналогичные или разные значения жесткости пружины и иметь аналогичную или разную длину. Рычаги 20а и 20b могут иметь одинаковую или разную длину.
Несмотря на то, что проиллюстрирована конфигурация с двумя рычагами, можно понять то, что может быть предусмотрено любое множество рычагов. Например, в одном варианте осуществления могут быть предусмотрены четыре рычага, расположенные на расстоянии друг от друга, соответствующем 90 градусам, вокруг позиционирующего устройства. Альтернативно могут быть предусмотрены шесть рычагов, расположенных на расстоянии друг от друга, соответствующем 60 градусам, вокруг позиционирующего устройства. В данной конфигурации каждый рычаг может выдвигаться и отводиться независимо от остальных рычагов. Альтернативно, некоторые рычаги могут работать парами, так что силы, действующие со стороны скважины на пару, вызывают отвод одного рычага и выдвигание противоположного рычага.
В одном варианте осуществления упор 34′ или 35′ может представлять собой штифт, имеющий определенную несимметричную конфигурацию, и в соответствующем подпружиненном листе 50 или 51 может быть выполнено отверстие, при этом отверстие будет иметь такую же несимметричную конфигурацию. Когда желательно сделать так, чтобы рычаг 20а не мог контактировать со стенкой ствола скважины, толкатель 30а поворачивают для обеспечения возможности совмещения упора 34′ с отверстием в подпружиненном листе 50, в результате чего обеспечивается возможность прохода упора 34′ через подпружиненный лист 50 (положение при невключенном двигателе). Когда желательно обеспечить возможность контактирования рычага 20а со стенкой ствола скважины, штангу 30а поворачивают так, чтобы упор 34′ не был совмещен с отверстием в подпружиненном листе 50, в результате чего обеспечивается приложение давления к пружине 40 через посредство подпружиненного листа 50 (включенное положение).
В другом варианте осуществления может быть обеспечена возможность выдвигания некоторых рычагов дальше от скважинного прибора, чем других рычагов. Данный вариант осуществления особенно полезен в стволах скважины с эксцентрической формой, таких как ствол скважины с приблизительно эллиптической формой с большой и малой осью. Варианты осуществления настоящего изобретения целесообразны в подобных скважинах. Например, могут быть предусмотрены такие рычаги, что при этом комплект из противоположных рычагов будет расположен так, что толкатель 30а поворачивается таким образом, что упор 34′ не будет совмещен с отверстием в подпружиненном листе 50, в результате чего давление будет приложено к пружине 40 через посредство подпружиненного листа 50, в то время как другой комплект из противоположных рычагов будет располагаться по-другому, так что штанга 30b поворачивается так, что упор 35′ совмещается с отверстием в подпружиненном листе 51. В данной конфигурации позиционирующее устройство по настоящему изобретению может быть использовано в стволе скважины с эллиптической периферией. Когда гайка 26 и 27 расположена в положении, при котором двигатель включен и которое показано на фиг.5с и 5d, только усилие, обусловленное жесткостью пружины 40 и 45, будет воздействовать на толкатель 30а, в то время как на штангу 30b воздействует только усилие со стороны вспомогательной пружины 72. Поскольку на противоположные рычаги 20а, 20b воздействует только большое открывающее усилие, данные рычаги стабилизируются по большой оси в стволе скважины.
Фиг.6 иллюстрирует вариант осуществления настоящего изобретения. Позиционирующее устройство 10 содержит множество рычагов, например, рычаги 20а, 20b и рычаги 20с, 20d (не показанные на фиг.6), расположенные поперек к рычагам 20а и 20b. Каждый рычаг 20а, 20b, 20с, 20d присоединен к соответствующему толкателю 30а, 30b, 30с, 30d (толкатели 30с и 30d не показаны). Соединительные звенья (на фиг.6 показаны звенья 33а, 33b) могут быть использованы для обеспечения данного соединения. В данной конфигурации каждый рычаг выполнен с возможностью его отвода или выдвигания независимо от каждого другого рычага. Конфигурации с двумя рычагами, четырьмя рычагами и шестью рычагами могут быть особенно целесообразны в различных применениях в стволах скважин, хотя любое число рычагов может быть использовано в настоящем изобретении. В некоторых вариантах осуществления некоторые рычаги могут иметь разную длину или могут выдвигаться на такое расстояние из корпуса устройства, которое отличается от расстояния, на которое выдвигаются другие рычаги. В некоторых применениях может быть предпочтительной работа противоположных рычагов в виде пары.
На любом из двух концов или на обоих концах позиционирующего устройства может быть предусмотрен соединитель для осуществления электрических и механических соединений между позиционирующим устройством и соседним элементом. Электрические соединения скважинного прибора, осуществляемые посредством электрического соединителя и перемещаемые вдоль корпуса скважинного прибора, могут быть выполнены известным образом.
Рычаги 20 могут быть выдвинуты посредством использования множества разных механизмов и их комбинаций. Например, при использовании позиционирующего устройства в качестве каверномера, рычаги могут выдвигаться только под действием усилия, действующего со стороны вспомогательной пружины. Альтернативно, при использовании в качестве центратора рычаги могут выдвигаться за счет разности усилий, приложенных со стороны вспомогательной пружины и пружины сжатия. В других применениях центратора рычаги могут выдвигаться только под действием усилия, действующего со стороны пружины сжатия. Кроме того, различные механизмы выдвигания могут быть использованы в комбинации. Например, если желательно выставление со смещением от центра (эксцентрическое), выбранные рычаги могут быть выдвинуты только под действием усилия, действующего со стороны вспомогательной пружины, в то время как другие рычаги могут быть выдвинуты под действием усилия, приложенного со стороны пружины сжатия. В вариантах осуществления без двигателя посредством изменения местоположения различных упоров пружины могут быть сжаты или растянуты, в результате чего изменяется усилие, приложенное к рычагу. В вариантах осуществления с двигателями шариковый винт обеспечивает приведение гаек в движение с вводом их в рабочий контакт с подпружиненными листами для сжатия пружин или для обеспечения возможности растяжения пружин.
Пружины 40, 41, 45 и 46, а также работа двигателя 22 в вариантах осуществления с двигателем обеспечивают регулирование выдвигания и отвода рычагов 20. Толкатели вызывают перемещение рычагов посредством соединительных звеньев, присоединенных с возможностью поворота на конце толкателей и присоединенных с возможностью поворота к концу рычагов. В конфигурации без двигателя усилие для позиционирования каждого рычага можно регулировать механически посредством упора 34 для растягивания или ослабления пружины 45.
В вариантах осуществления настоящего изобретения, предусмотренных с двигателями, двигатель 22 обеспечивает управление перемещением рычагов 20а, 20b, 20с и 20d между отведенным положением вблизи корпуса позиционирующего устройства 10, и выдвинутым положением вдали от корпуса позиционирующего устройства 10. Двигатель 22 обеспечивает сообщение линейного движения симметричному соединительному стержню 24, при этом на соединительном стержне предусмотрены соединительные элементы 26 и 27, предназначенные для осуществления контакта с подпружиненными листами. На фиг.6 симметричный соединительный стержень показан в виде шарикового винта, и соединительные элементы 26 и 27 показаны в виде гаек. Поворот шарикового винта 24 вызывает прямолинейное движение гаек 26 и 27. Гайки 26 и 27 установлены на шариковом винте 24 таким образом, что поворот (вращение) шарикового винта 24 вызывает перемещение гайки 26 с вводом ее в контакт с подпружиненным листом 51 или перемещение гайки 27 с вводом ее в контакт с подпружиненным листом 52. Данное усилие, приложенное к подпружиненному листу 51 или 52, в свою очередь, вызывает сжатие или растяжение пружины 40, что приводит к отводу или выдвиганию рычагов 20а и 20b так, как желательно, посредством приведения двигателя 22 в движение в прямом или обратном направлении. В одном варианте осуществления витки резьбы на шариковом винте 24 на противоположных концах винта могут иметь разные направления, так что гайки 26 и 27 будут перемещаться в разных направлениях при вращении шарикового винта 24. В данном варианте осуществления гайки 26 и 27 перемещаются по направлению друг к другу, так что подпружиненные листы 51 и 52 осуществляют сжатие пружины 40. Кроме того, посредством вращения винта 24 впоследствии обеспечивается контакт подпружиненного листа 50 с гайкой 26 вдали от листа 51 и контакт подпружиненного листа 53 с гайкой 27 вдали от листа 52, в результате чего обеспечивается растяжение соответствующей пружины 45 и 46 для максимизации давления рычага.
Датчик положения определяет положение толкателя или, более точно в некоторых вариантах осуществления, положение шариковой гайки относительно толкателя. Как правило, один конец датчика положения зафиксирован относительно корпуса, а другой конец служит в качестве первого концевого упора штанги. Положение каждого рычага указывается соответствующим рычагу потенциометром, и данная информация о положении передается обратно на поверхность, передается к картриджу для скважинной телеметрии, записывается в память для хранения данных или отслеживается или регистрируется иным образом. Таким образом, оператор или механизм управления может обеспечить уменьшение или увеличение давления рычагов на ствол скважины посредством приведения двигателя в действие в соответствующем направлении. В некоторых вариантах осуществления механизм управления содержит систему управления, которая осуществляет мониторинг датчика давления на конце каждого рычага и автоматическое регулирование положения рычага на основе давления контакта со стволом скважины. Датчик относительного азимута, такой как инклинометр, может быть предусмотрен для определения ориентации скважинного прибора в стволе скважины.
В некоторых вариантах осуществления может быть предусмотрен механизм быстрого закрытия; различные варианты осуществления механизма быстрого закрытия показаны на фиг.7а-7с. На фиг.7а-7с показаны варианты осуществления механизма быстрого закрытия, которые содержат, по меньшей мере, один рычаг 66, установленный между подпружиненным листом 51 и подпружиненным листом 54. Рычаг 66 может быть присоединен с возможностью поворота к опоре 68 для рычага на одном конце, так что один конец рычага будет зафиксирован, или рычаг 66 может быть присоединен с возможностью поворота к опоре 68 для рычага в середине рычага, так что оба конца будут подвижными относительно поворотного соединения. Опора 68 для рычага прикреплена к подпружиненному листу 54. Пределы перемещения рычага 66 ограничены упорами 34 и 35. Толкатель 69 прикреплен к противоположному подпружиненному листу 51. Следует отметить, что в используемом здесь смысле термин "толкатель" используется для описания штанг, которые или толкают, или тянут, или выполняют оба эти действия. Когда рычаги 20а и 20b отводятся, подпружиненные листы 51 и 54 перемещаются по направлению друг к другу, и толкатель 69 входит в контакт с рычагом 66. При приближении подпружиненных листов 51 и 54 друг к другу рычаг 66 входит в контакт с упором 34, и толкатель 69 продолжает давить на рычаг 66. Это приводит к возникновению тягового усилия, действующего на опору 68 для рычага со стороны рычага 66, в результате чего ускоряется перемещение подпружиненного листа 54 по направлению к подпружиненному листу 51. Конечный контакт подпружиненного листа 54 с упором 35 приводит к окончанию движения подпружиненного листа 54 по направлению к подпружиненному листу 51. Как показано на фиг.7с, могут быть предусмотрены подвижные нажимные плиты 67, которые расположены с возможностью входа в контакт с любым из двух подвижных концов рычага 66, когда он закреплен в середине с возможностью поворота.
Позиционирующее устройство 10 может быть введено в ствол скважины с отведенными рычагами. В некоторых вариантах осуществления могут быть предусмотрены штифты рычагов. Штифты рычагов могут быть введены в некоторых случаях применения для удерживания выбранных рычагов в отведенном положении, в то время как в других случаях применения штифты рычагов могут быть удалены и обеспечена возможность выдвигания всех рычагов.
Может быть предпочтительно предусмотреть предпочтительное место разрушения, например, посредством использования срезного штифта для соединителя 28 в том случае, если избыточное давление будет действовать на рычаг или позиционирующее устройство 10 застрянет в стволе. Разрушение в предпочтительном месте обеспечит возможность смещения застрявшего устройства в стволе скважины без дополнительного повреждения устройства.
Возможные элементы [признаки] могут быть предусмотрены в некоторых вариантах осуществления. Предпочтительное место разрушения может быть предусмотрено вблизи конца штанги рядом с рычагом. Срезные штифты могут быть предусмотрены в качестве соединителей 28 для получения предпочтительного места разрушения. При принудительном извлечении позиционирующего устройства, застрявшего в стволе скважины, место разрушения обеспечивает образование предпочтительного места разламывания, в результате чего избегают произвольного разрушения где-либо еще в позиционирующем устройстве.
Вышеприведенное описание компонентов обеспечивает достаточные предпосылки для разъяснения работы типовых вариантов осуществления изобретения, которые далее будут описаны. Позиционирующее устройство вводят в ствол скважины с помощью транспортного средства, такого как талевый канат, трос для работы в скважине, гибкий трубопровод. Позиционирующее устройство может быть предусмотрено как отдельное или в сочетании со скважинным прибором (инструментом).
Когда в процессе работы устройство опускают в ствол скважины или извлекают из ствола скважины, толкатели отведены, в результате чего обеспечивается отвод рычагов таким образом, что они не контактируют со стенками ствола скважины, вследствие чего уменьшается торможение. При каротаже ствола скважины толкатели выдвигаются и башмаки поджимаются к стенке ствола скважины с обеспечением хорошего контакта с ней.
Один вариант осуществления настоящего изобретения представляет собой способ измерения ствола скважины посредством использования позиционирующего устройства в качестве скважинного каверномера. При размещении позиционирующего устройства в стволе скважины рычаги отведены. Как только будет достигнута представляющая интерес глубина, команда на выдвигание передается позиционирующему устройству, и в ответ на указанную команду рычаги выдвигаются. Как правило, позиционирующее устройство будет работать в режиме, соответствующем невключенному двигателю, при использовании в качестве скважинного каверномера. Поскольку каждый рычаг выполнен с возможностью независимого приведения его в действие, позиционирующее устройство по настоящему изобретению может быть использовано для выполнения скважинных измерений в неоднородных стволах скважин. Вариант осуществления настоящего изобретения, в котором предусмотрены четыре или более рычагов, имеет особое применение для выполнения измерений каверномером в скважинах овальной формы как вдоль короткой оси, так и вдоль длинной оси. К применениям кавернометрии относятся оценка объема ствола скважины, оценка объема цемента и корректировка влияния диаметра скважины на данные каротажа при обработке данных.
Фиг.8 иллюстрирует систему для скважинной кавернометрии, содержащую позиционирующее устройство 10. Зонд 90 размещают в стволе 100 скважины посредством транспортирующего средства 110. К типовым транспортирующим средствам относятся бурильная колонна, талевый канат, гибкий трубопровод, трос для работы в скважине или другие подобные способы. Рычаги 20е и 20f выдвигаются, и соединительные рамные конструкции 80е и 80f входят в контакт с периметральной поверхностью ствола скважины при перемещении зонда 90 в стволе скважины. Датчик 60е определяет относительное перемещение рычага 20е, и датчик 60f определяет относительное перемещение рычага 20f. Известны датчики, выполненные с возможностью быстро преобразовывать данные об относительном положении рычагов в электрический сигнал, который может быть зарегистрирован в скважине или передан на поверхность. Таким образом, настоящее изобретение обеспечивает предоставление информации о диаметре ствола скважины и относительной конфигурации стенок, при этом позиционирующее устройство функционирует в качестве каверномера при перемещении вдоль периметральной поверхности ствола скважины. Как правило, выходные данные каждого датчика, отражающие положение каждого соответствующего рычага каверномера, регистрируются в зависимости от глубины скважины. При наличии множества рычагов, каждый из которых предусмотрен с независимым датчиком, выдающим данные, отражающие положение рычага в зависимости от глубины, настоящее изобретение может быть использовано для регистрации изображения поперечного сечения, зарегистрированного в зависимости от глубины. Известны поверхностные системы 120, которые обеспечивают подобные возможности регистрации. К применениям подобных данных, полученных датчиком, относятся вычисления значений корректировок во время обработки данных или кавернометрия ствола скважины. Данные скважинной кавернометрии необходимы для многих применений, таких как вычисление объема цемента.
Настоящее изобретение имеет много применений при позиционировании в стволе скважины. Один способ включает в себя центрирование скважинных приборов, таких как прибор акустического каротажа, в стволе скважины. В некоторых случаях применения позиционирующее устройство может быть размещено над и под прибором акустического каротажа. Вариант осуществления, содержащий двигатель, особенно полезен для центрирования скважинных приборов, при этом каждый рычаг приводится в действие с приводом от двигателя. Позиционирующее устройство вводят в ствол скважины с отведенными рычагами. Когда позиционирующее устройство достигнет глубины, представляющей интерес, двигатель приводят в действие посредством команды дистанционного управления. Усилие, необходимое для выдвигания рычагов для ввода их в контакт со стволом скважины с целью центрирования скважинного прибора, может варьироваться в зависимости от отклонения скважины, при этом при отклонении скважины от вертикали требуется большее усилие. Мощность, передаваемая двигателем приводному валу, от которого, в свою очередь, усилие передается толкателям и рычагам, можно регулировать посредством команды дистанционного управления, когда позиционирующее устройство находится в скважине.
Когда скважинный прибор и позиционирующее устройство проходят через ствол скважины, данные о положении от датчиков, смонтированных на рычагах устройства, принимаются и используются для мониторинга центрирования скважинного прибора в стволе скважины. Варианты осуществления настоящего изобретения, содержащие механизм быстрого закрытия, особенно полезны в том случае, когда скважинный прибор устанавливают в заданном положении, выполняют измерение и затем скважинный прибор устанавливают в другом месте. Если будет обнаружено смещение от центра, может быть выдана команда на увеличение или уменьшение мощности, передаваемой двигателем. Как правило, на начальной стадии двигатель обеспечивает подачу меньшей мощности к позиционирующему устройству, и мощность будет увеличиваться только так, как необходимо для центрирования скважинного прибора в стволе скважины. Для поддержания хорошего контакта со стенкой ствола скважины датчики могут быть размещены на шарнирно присоединенных башмаках.
Независимая работа рычагов по настоящему изобретению особенно предпочтительна в наклонных скважинах (искривленных стволах скважин) вследствие того, что усилие, вызывающее выдвигание нижних рычагов, может быть увеличено для поддержания одинакового угла раскрыва для каждой пары рычагов, соответственно находящихся на одной линии. Таким образом, может быть обеспечено центрирование скважинного прибора надлежащим образом во время каротажа независимо от диаметра и отклонения ствола скважины.
Можно оценить то, что в соответствии с настоящим изобретением также разработаны устройство и способ позиционирования со смещением от центра в стволе скважины. В данном случае применения выбранные рычаги могут быть приведены в действие с приводом от двигателя, в то время как другие рычаги приводятся в действие без привода от двигателя. Во время размещения в стволе скважины приводимые от двигателя рычаги будут отведены, в то время как не приводимые от двигателя рычаги могут быть или не быть отведены. Когда будет достигнута заданная глубина в стволе скважины, команда на выдвигание будет подана к приводимым от двигателя рычагам, и рычаги будут выдвигаться с использованием заданной мощности.
Устройство по настоящему изобретению может быть использовано в способах каротажа вдоль короткой оси. В стволах скважин, имеющих овальную форму, скважинные приборы имеют тенденцию ориентироваться по направлению к более длинной оси овальной формы. Для противодействия данной тенденции может быть использовано большее усилие, действующее на рычаги по настоящему изобретению, которые выставлены вдоль более короткой оси овального ствола скважины. Альтернативно, при использовании позиционирующего устройства по настоящему изобретению совместно со скважинным прибором, который содержит свои собственные позиционирующие рычаги, рычаги по настоящему изобретению могут быть использованы для позиционирования скважинного прибора относительно длинной оси ствола скважины, в результате чего обеспечивается возможность выравнивания позиционирующих рычагов скважинного прибора относительно короткой оси ствола скважины.
Кроме того, работающий на поверхности оператор может использовать данную информацию для корректировки операций в реальном времени. Известные способы связи для управления двигателем с поверхности и известные способы для обеспечения подачи питания к двигателю с поверхности или от других скважинных инструментов могут быть использованы для осуществления оперативного управления по настоящему изобретению. Следует отметить, что в дополнительном варианте осуществления на рычагах по настоящему изобретению может быть предусмотрен держатель датчика.
Скважинное устройство по настоящему изобретению может быть использовано отдельно, в виде групп из более одного устройства, в которых все устройства имеют один и тот же вариант осуществления, в виде групп из более одного устройства, в которых варианты осуществления настоящего изобретения различаются, или в комбинации с другими скважинными позиционирующими устройствами или скважинными приборами, способными обеспечить самоустанавливаемость в стволе скважины. Например, скважинная каротажная система может содержать одно скважинное устройство по настоящему изобретению, используемое для центрирования прибора акустического каротажа, и другое скважинное устройство по настоящему изобретению для позиционирования другого скважинного прибора относительно ствола скважины. Аналогичным образом, настоящее изобретение может быть использовано для предпочтительного позиционирования части колонны с приборами в сочетании с другими скважинными приборами, которые обладают свойством самоустанавливаемости. Также следует отметить, что различные варианты осуществления настоящего изобретения, такие как варианты осуществления с двигателями (с механизированным приводом) и без двигателей (без механизированного привода), могут использоваться в комбинации в колонне со скважинными приборами.
На фиг.9а-9d показана приведенная в качестве примера скважинная каротажная система, в которой предусмотрены несколько позиционирующих устройств 10А, 10В, 10С, 10D для выставления различных скважинных приборов (например, прижимного зонда 105 плотностного каротажа; прибора 101 акустического каротажа) в стволе скважины в различных предпочтительных ориентированных положениях для обоих случаев - то есть для круглого и овального стволов скважин. В некоторых вариантах осуществления, и как показано на фиг.9а, может быть предусмотрен шарнирный отклонитель 120 для обеспечения разъединения между различными позиционирующими устройствами. На фиг.9а показаны позиционирующие устройства 10А и 10В, которые в случае круглого ствола скважины используются как центратор и в которых рычаги 20а, 20b, 20с и 20d устройства 10А и аналогичные рычаги устройства 10В установлены в активном положении под действием приводного усилия. Это обеспечивает центрированное положение прибора 101 акустического каротажа. Однако некоторые скважинные приборы, такие как прижимной зонд 105 плотностного каротажа, должны быть установлены в заданном положении со смещением от центра. В случае круглых стволов скважин устройство 10D может быть использовано для установки скважинного прибора со смещением от центра посредством предпочтительной подачи мощности к некоторым рычагам, при этом обеспечиваются преимущества по сравнению с обычными устройствами для установки со смещением от центра, выполненными с листовыми рессорами, например, вследствие способности устройства 10D обеспечивать избирательный отвод при проходе через узкие сечения.
В случае овальных стволов скважин комбинация из двух или более позиционирующих устройств предпочтительно используется для корректного позиционирования множества разных скважинных приборов. Для позиционирования прибора 101 акустического каротажа в овальном стволе скважины оба устройства 10А и 10В предпочтительно приводятся в действие при всех рычагах, приводимых от двигателя. На фиг.9с показано устройство 10В с рычагами 20а′, 20b′, 20с′ и 20d′, которые все приводятся в действие посредством двигателя. В тех случаях, когда в овальном стволе скважины желательно выполнить каротаж со смещением от центра на короткой оси (например, с использованием прибора 105 для плоскостного каротажа, выполняющего каротаж по короткой оси в овальном стволе скважины), позиционирующее устройство 10С должно быть приведено в действие одной парой рычагов при включенном двигателе и другой парой рычагов при невключенном двигателе. На фиг.9d показано, что устройство 10С предпочтительно приводится в действие с рычагами 20с′′ и 20d′′, приводимыми в действие посредством двигателя, и рычагами 20а′′ и 20b′′, не приводимыми в действие посредством двигателя. При работе, подобной описанной, существенно большее давление создается вдоль одной оси, что обеспечит принудительное совмещение данной оси с длинной осью ствола скважины. Это создает возможность предпочтительного выставления скважинного прибора, такого как зонд 105 плоскостного каротажа, относительно короткой оси.
В других конфигурациях может быть предпочтительным предусмотреть вращающееся переходное соединение между позиционирующими устройствами для выставления устройств в различных ориентированных положениях друг относительно друга. Это может обеспечить функциональность, например, позиционирующего инструмента с восемью рычагами посредством использования двух позиционирующих инструментов с четырьмя рычагами, соединенных посредством комплекта вращающихся переходников, установленного со смещением 45 градусов.
Несмотря на то, что здесь были показаны и описаны определенные варианты осуществления устройства по настоящему изобретению, очевидно, что могут быть выполнены различные изменения и модификации описанного устройства без отхода от объема и сущности данного изобретения. Предусмотрено, что каждый элемент или операцию, приведенные в любом из нижеприведенных пунктов формулы изобретения, и каждую комбинацию элементов следует понимать как относящиеся ко всем эквивалентным элементам или комбинациям.
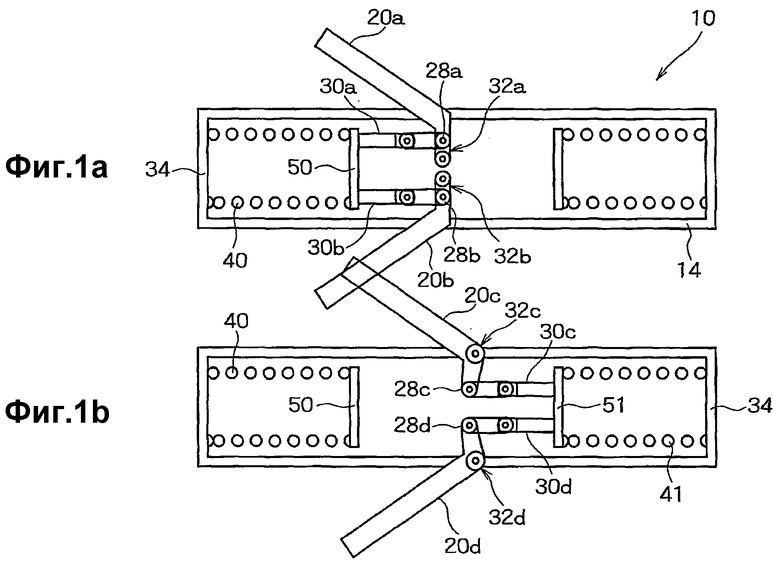
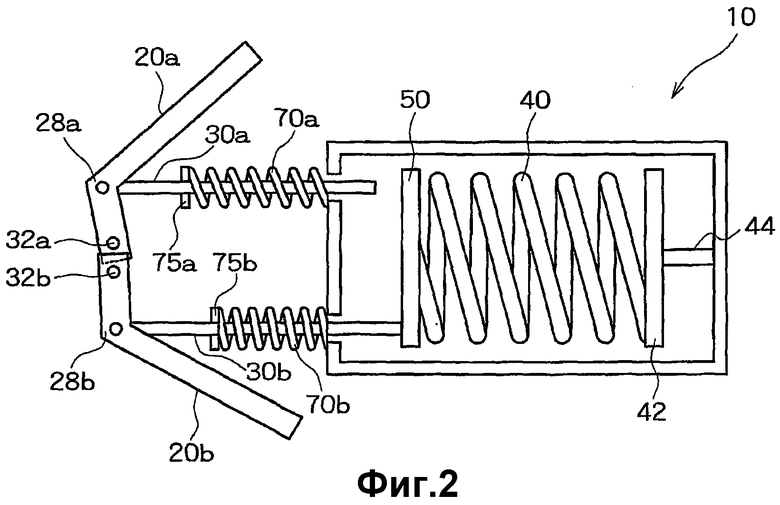
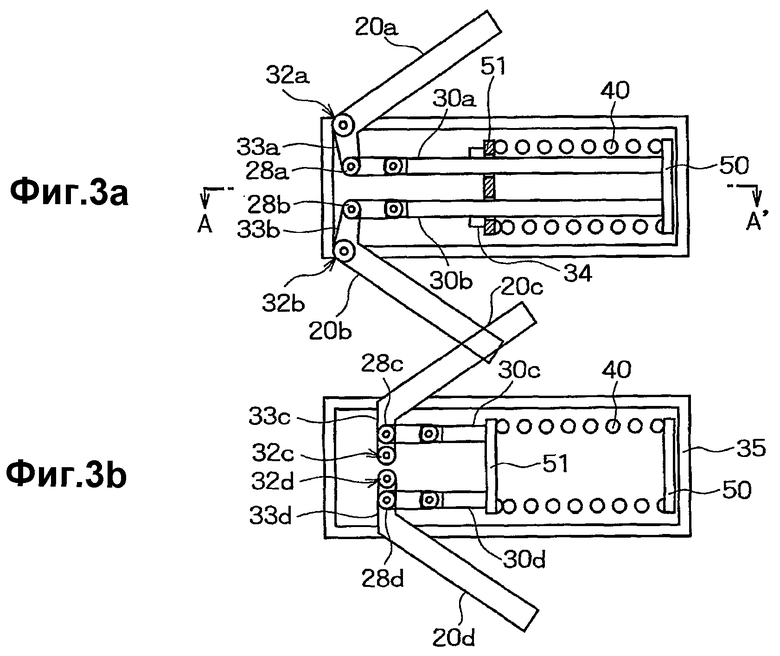
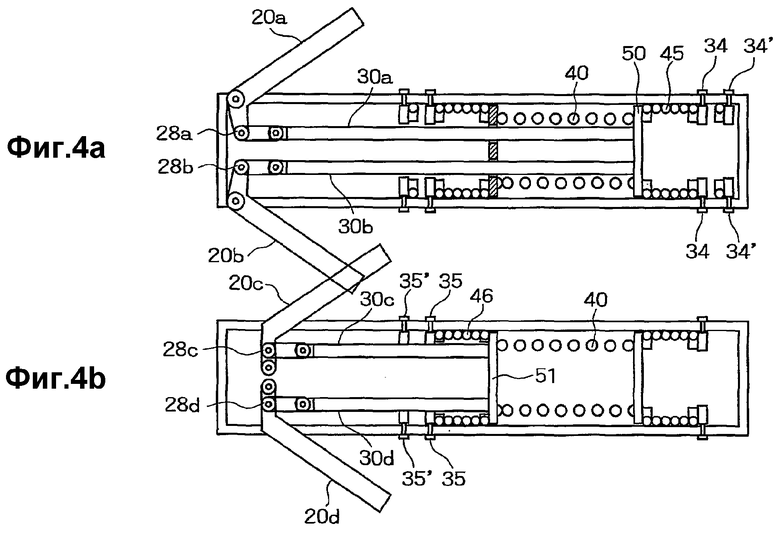

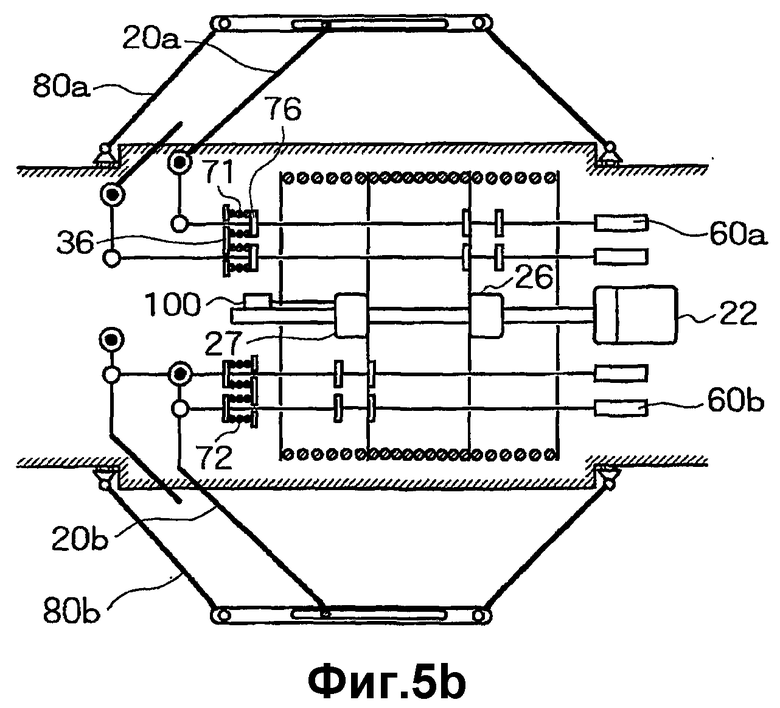

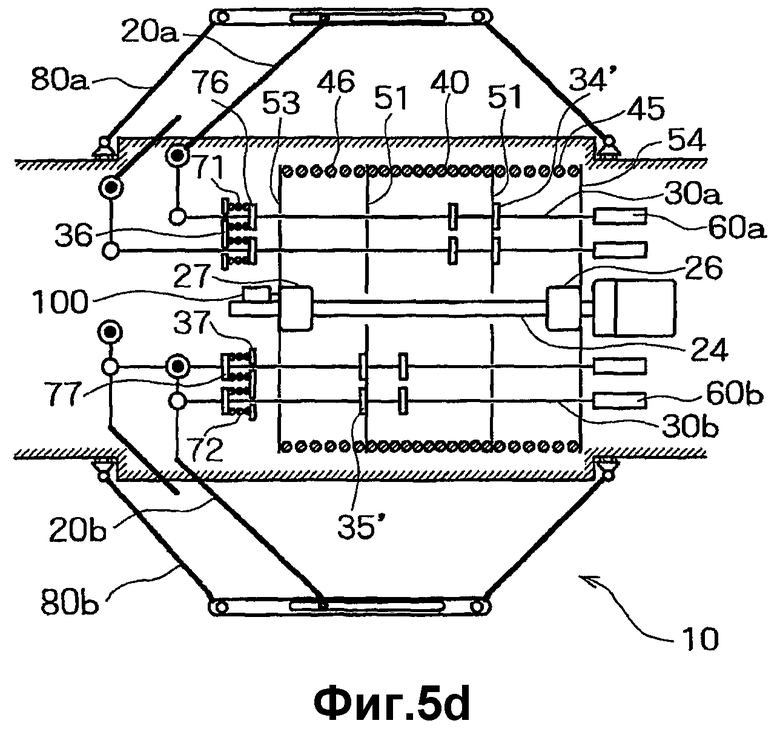

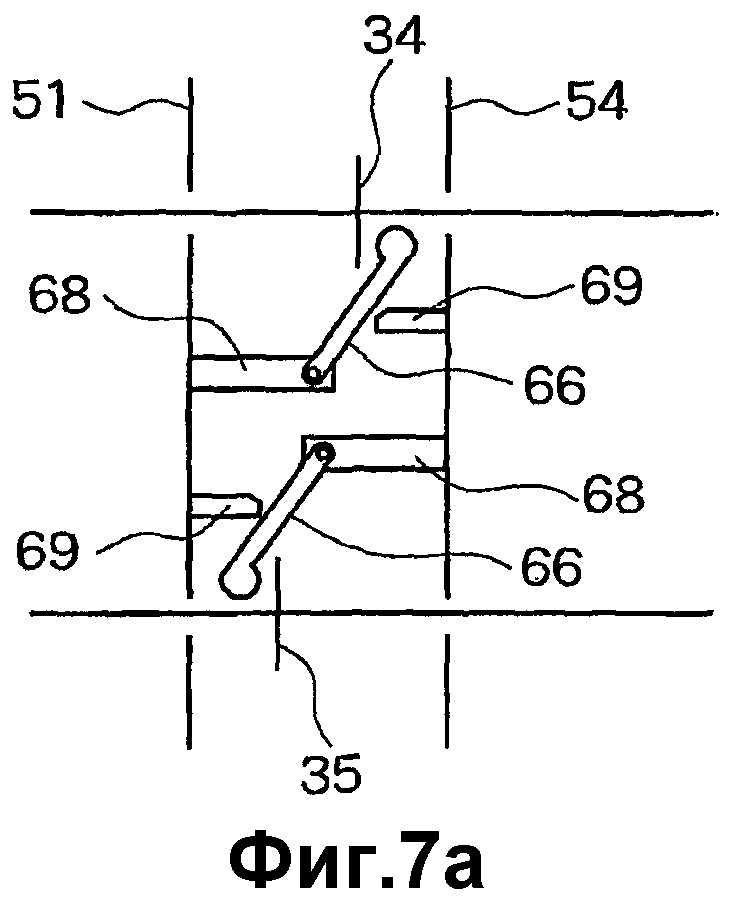
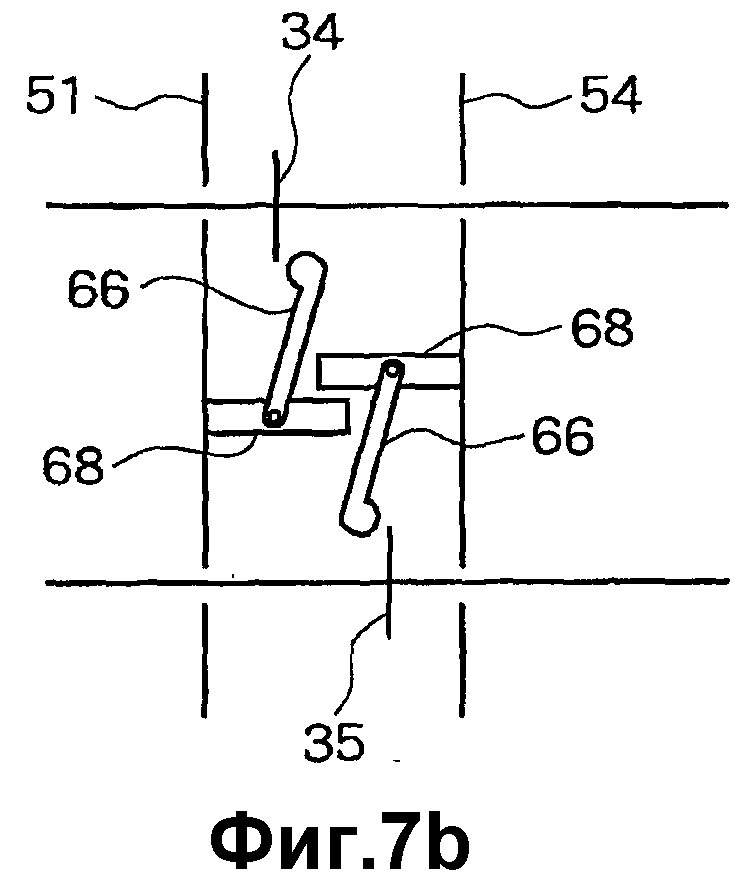
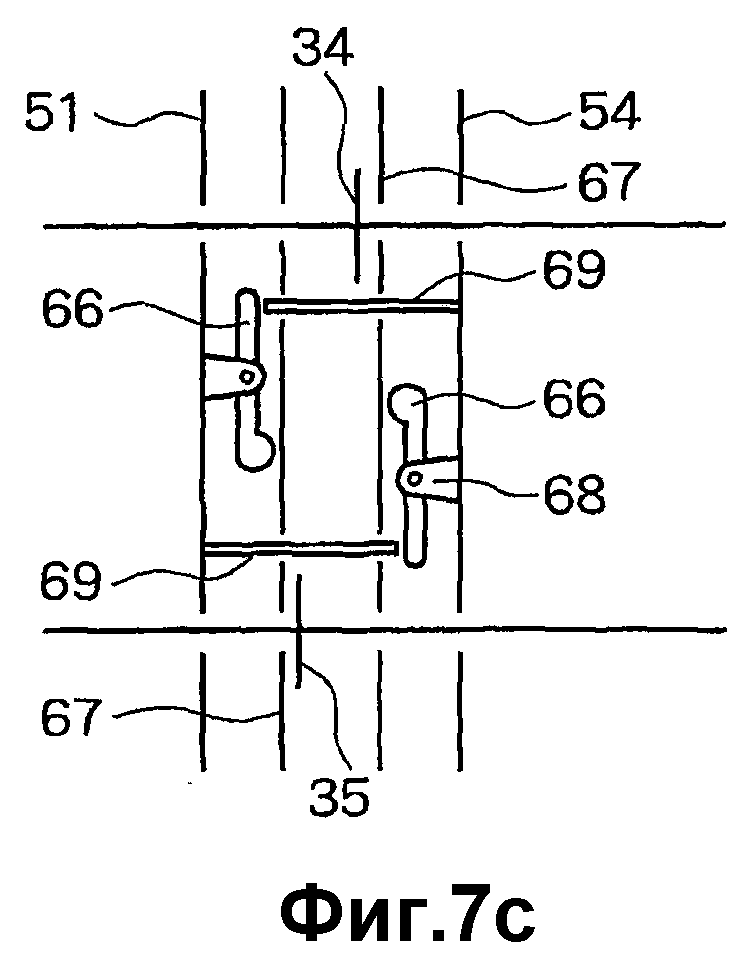

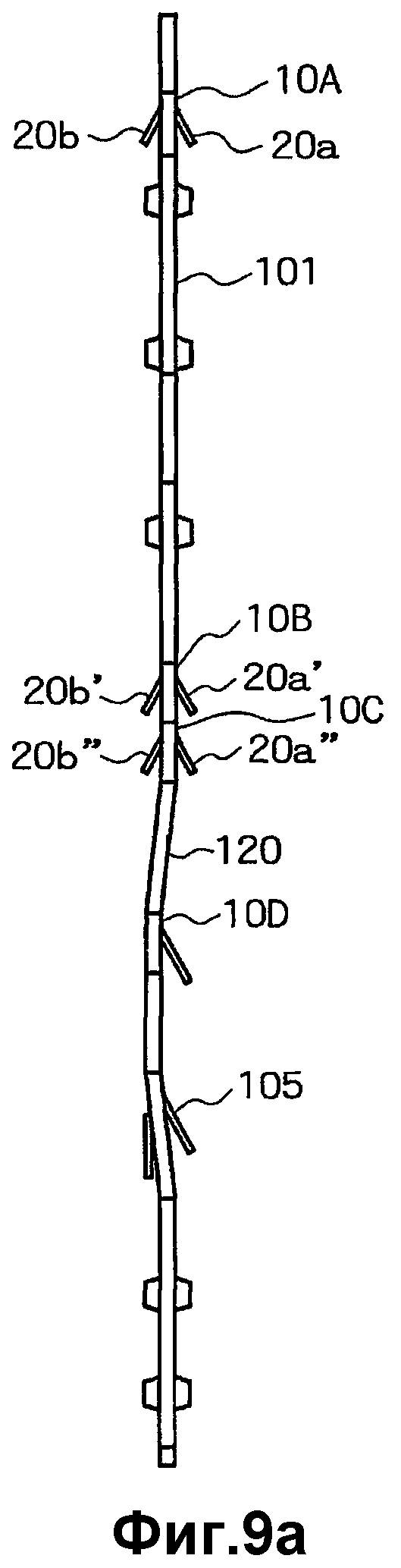
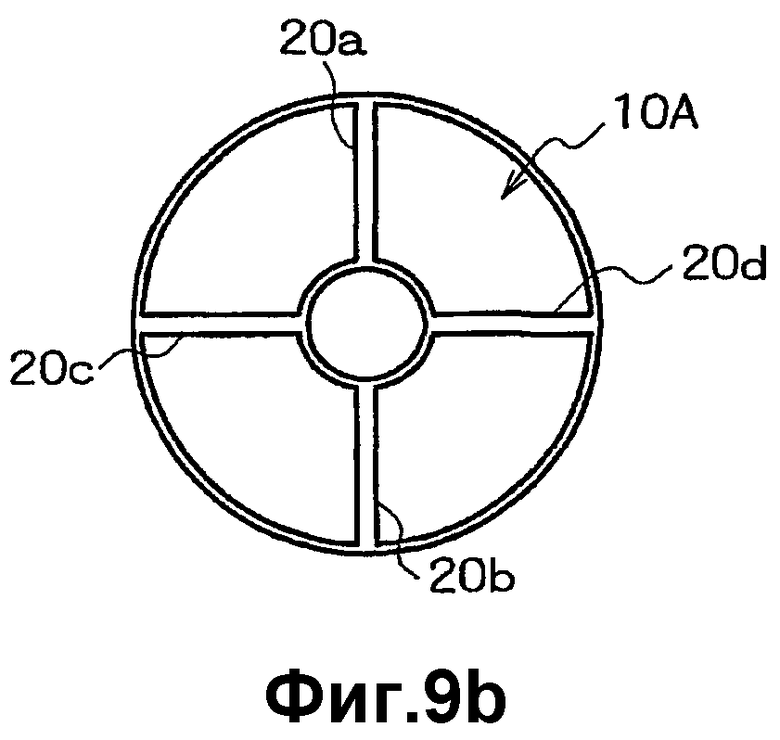
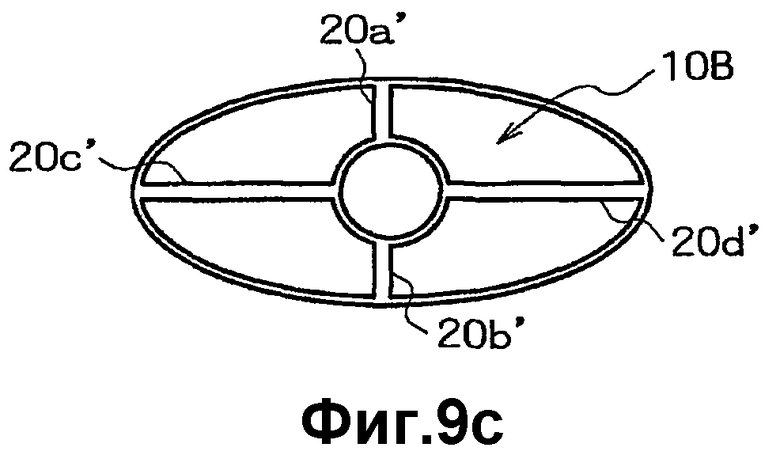
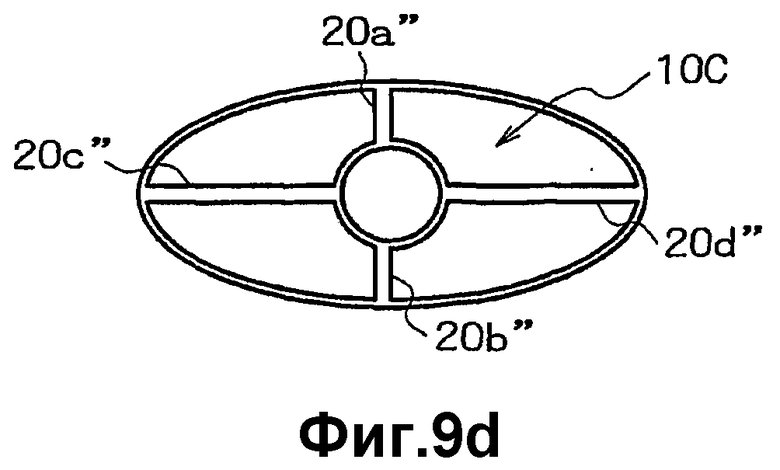
Предложены устройство для позиционирования скважинного прибора и для измерений и способы его использования. Техническим результатом изобретения является расширение области применения, эффективность и универсальность. Устройство и способ могут применяться для центрирования каротажного прибора (скважинного зонда) в стволе скважины или для установки каротажного прибора в заданном относительном выставленном положении относительно периметральной (периферийной) поверхности ствола скважины. Способ и устройства могут быть использованы для получения полезной информации, относящейся к диаметру и конфигурации ствола скважины. Различные варианты осуществления пригодны для центрирования скважинного прибора, установки его со смещением от центра и иным образом в стволе скважины. Также разработаны способы измерений для определения диаметра и конфигурации ствола скважины посредством использования позиционирующего устройства. 9 н. и 59 з.п. ф-лы, 20 ил.
1. Устройство для позиционирования в стволе скважины, содержащее корпус, множество рычагов, каждый из которых выполнен с возможностью его независимого выдвигания и независимого отвода, толкатель, соединенный с каждым рычагом и находящийся в рабочем контакте с подпружиненным листом, и первый упругий пружинный механизм, контактирующий одним концом с подпружиненным листом, и по меньшей мере, один второй упругий пружинный механизм, находящийся в рабочем контакте с толкателем и имеющий зафиксированный конец.
2. Устройство по п.1, в котором первый упругий пружинный механизм представляет собой цилиндрическую винтовую пружину.
3. Устройство по п.1, в котором, по меньшей мере, один второй упругий пружинный механизм представляет собой цилиндрическую винтовую пружину.
4. Устройство по п.1, дополнительно содержащее, по меньшей мере, один датчик положения, приспособленный определять положение, по меньшей мере, одного толкателя.
5. Устройство по п.1, дополнительно содержащее упоры для регулирования выдвигания рычагов.
6. Устройство по п.1, дополнительно содержащее, по меньшей мере, один датчик, расположенный на конце, по меньшей мере, одного рычага.
7. Устройство по п.6, в котором, по меньшей мере, один датчик представляет собой датчик силы.
8. Устройство по п.7, дополнительно содержащее систему управления, предназначенную для автоматического регулирования положения рычага на основе измерений, выполненных датчиком силы.
9. Устройство по п.1, дополнительно содержащее закрывающий механизм.
10. Устройство по п.9, в котором закрывающий механизм представляет собой соединительную раму, соединительный рычаг, пластинчатую пружину или листовую рессору.
11. Устройство по п.1, дополнительно содержащее датчик относительного азимута.
12. Устройство для позиционирования в стволе скважины, содержащее корпус, множество рычагов, каждый из которых выполнен с возможностью его независимого выдвигания и независимого отвода, толкатель, соединенный с каждым рычагом и находящийся в рабочем контакте с подпружиненным листом, упругий пружинный механизм, контактирующий одним концом с подпружиненным листом, и множество упоров для независимого регулирования выдвигания рычагов.
13. Устройство по п.12, в котором подпружиненный лист содержит ориентирующий паз, и толкатель содержит штифт, способный проходить через ориентирующий паз при повороте толкателя для выравнивания штифта относительно паза и не проходить через паз при повороте толкателя и не выравнивать штифт относительно паза.
14. Устройство по п.12, дополнительно содержащее упругий вспомогательный пружинный механизм, находящийся в рабочем контакте с толкателем и имеющий зафиксированный конец.
15. Устройство по п.14, в котором зафиксированный конец вспомогательного пружинного механизма прикреплен к подпружиненному листу, выполненному с возможностью регулирования его положения.
16. Устройство по п.15, в котором подпружиненный лист, выполненный с возможностью регулирования его положения, находится в рабочем контакте с приводной штангой.
17. Устройство для позиционирования в стволе скважины, содержащее корпус, множество рычагов, каждый из которых выполнен с возможностью его независимого выдвигания и независимого отвода, толкатель, соединенный с каждым рычагом и находящийся в рабочем контакте с подпружиненным листом, упругий пружинный механизм, контактирующий одним концом с подпружиненным листом, и, по меньшей мере, один механизм быстрого закрытия и открытия.
18. Устройство по п.17, в котором, по меньшей мере, один механизм быстрого закрытия и открытия содержит, по меньшей мере, один рычаг, присоединенный к опоре с возможностью поворота, и противоположный толкатель, предназначенный для перемещения рычага вокруг оси поворота, при этом механизм быстрого закрытия и открытия способен воздействовать на, по меньшей мере, один рычаг.
19. Устройство по п.18, в котором толкатель расположен на свободном конце опоры.
20. Устройство для позиционирования в стволе скважины, содержащее корпус, первый рычаг, соединенный с первым толкателем, находящимся в рабочем контакте с первым подпружиненным листом, второй рычаг, соединенный со вторым толкателем, находящимся в рабочем контакте со вторым подпружиненным листом, и упругий пружинный механизм, при этом первый подпружиненный лист контактирует с одним концом упругого пружинного механизма, и второй подпружиненный лист контактирует с противоположным концом упругого пружинного механизма.
21. Устройство по п.20, содержащее два первых рычага, работающих как первая пара.
22. Устройство по п.21, дополнительно содержащее два вторых рычага, работающих как вторая пара.
23. Устройство по п.20, содержащее, по меньшей мере, один механизм быстрого закрытия и открытия.
24. Устройство по п.23, в котором механизм быстрого закрытия и открытия содержит, по меньшей мере, один рычаг, присоединенный к опоре с возможностью поворота, и противоположный толкатель, предназначенный для перемещения рычага вокруг оси поворота, при этом механизм быстрого закрытия и открытия способен воздействовать на, по меньшей мере, один из первого и второго рычагов.
25. Устройство по п.24, в котором толкатель расположен на свободном конце опоры.
26. Устройство по п.20, дополнительно содержащее множество упоров для независимого регулирования выдвигания рычагов.
27. Устройство по п.20, в котором подпружиненный лист содержит ориентирующий паз, и толкатель содержит штифт, при этом штифт способен проходить через ориентирующий паз при повороте толкателя для выравнивания штифта относительно паза и не проходить через паз при повороте толкателя и не выравнивать штифт относительно паза.
28. Устройство по п.20, дополнительно содержащее упругий, вспомогательный пружинный механизм, находящийся в рабочем контакте с, по меньшей мере, одним из первого или второго толкателей и имеющий зафиксированный конец.
29. Устройство по п.28, в котором зафиксированный конец вспомогательного пружинного механизма прикреплен к подпружиненному листу, выполненному с возможностью регулирования его положения.
30. Устройство по п.29, в котором подпружиненный лист, выполненный с возможностью регулирования его положения, находится в рабочем контакте с шариковой гайкой, расположенной на реверсивном шариковом винте.
31. Устройство по п.30, в котором двигатель способен приводить в движение реверсивный шариковый винт для перемещения шариковой гайки в рабочий контакт с подпружиненным листом для сжатия или отпускания вспомогательного пружинного механизма.
32. Устройство для позиционирования в стволе скважины, содержащее удлиненный корпус, множество рычагов, каждый из которых присоединен к отдельному толкателю, приводную штангу, содержащую соединительный стержень и соединительный элемент, двигатель, выполненный с возможностью сообщения усилия приводной штанге, и, по меньшей мере, один первый упругий пружинный механизм, находящийся в рабочем контакте с приводной штангой и способный воздействовать на, по меньшей мере, один толкатель.
33. Устройство по п.32, дополнительно содержащее, по меньшей мере, один второй упругий пружинный механизм, находящийся в рабочем контакте с толкателем и имеющий зафиксированный конец.
34. Устройство по п.33, в котором пружинные механизмы являются цилиндрическими винтовыми пружинами.
35. Устройство по п.32 в котором первый упругий пружинный механизм способен воздействовать на, по меньшей мере, один толкатель посредством рабочего контакта с подпружиненным листом.
36. Устройство по п.32, дополнительно содержащее, по меньшей мере, один датчик положения, способный определять положение, по меньшей мере, одного толкателя.
37. Устройство по п.32, дополнительно содержащее упоры для регулирования выдвигания рычагов.
38. Устройство по п.32, дополнительно содержащее множество упоров для независимого регулирования выдвигания каждого рычага.
39. Устройство по п.32, дополнительно содержащее, по меньшей мере, один датчик, расположенный на конце, по меньшей мере, одного рычага.
40. Устройство по п.39, в котором, по меньшей мере, один датчик представляет собой датчик силы.
41. Устройство по п.40, дополнительно содержащее систему управления, предназначенную для автоматического регулирования положения рычага на основе измерений, выполненных датчиком силы.
42. Устройство по п.32, дополнительно содержащее закрывающий механизм.
43. Устройство по п.42, в котором закрывающий механизм представляет собой рамную конструкцию из соединительных звеньев, соединительный рычаг, пластинчатую пружину или листовую рессору.
44. Устройство по п.32, дополнительно содержащее, по меньшей мере, один механизм быстрого закрытия и открытия.
45. Устройство по п.32, дополнительно содержащее датчик относительного азимута.
46. Устройство по п.32, в котором, по меньшей мере, один толкатель находится в рабочем контакте с приводной штангой и, по меньшей мере, один толкатель не находится в рабочем контакте с приводной штангой.
47. Устройство по п.32, в котором подпружиненный лист содержит ориентирующий паз, и толкатель содержит штифт, при этом штифт способен проходить через ориентирующий паз при повороте толкателя для выравнивания штифта относительно паза и не проходить через паз при повороте толкателя и не выравнивать штифт относительно паза.
48. Устройство по п.32, дополнительно содержащее, по меньшей мере, один механизм быстрого закрытия и открытия.
49. Устройство по п.48, в котором механизм быстрого закрытия и открытия содержит, по меньшей мере, один рычаг, присоединенный к опоре с возможностью поворота, и противоположный толкатель, предназначенный для перемещения рычага вокруг оси поворота, при этом механизм быстрого закрытия способен воздействовать на, по меньшей мере, один рычаг.
50. Устройство по п.49, в котором толкатель расположен на свободном конце опоры.
51. Устройство по п.32, дополнительно содержащее упругий вспомогательный пружинный механизм, находящийся в рабочем контакте с отдельным толкателем и имеющий зафиксированный конец.
52. Устройство по п.51, в котором зафиксированный конец вспомогательного пружинного механизма прикреплен к подпружиненному листу, выполненному с возможностью регулирования его положения.
53. Устройство по п.52, в котором подпружиненный лист, выполненный с возможностью регулирования его положения, находится в рабочем контакте с приводной штангой.
54. Скважинный каверномер, содержащий удлиненный корпус, приводную штангу, имеющую соединительный стержень и соединительный элемент, двигатель, способный сообщать усилие приводной штанге, и множество рычажных систем, каждая из которых содержит рычаг, выполненный с возможностью выдвигания его наружу из корпуса, присоединенный с возможностью поворота к толкателю, контактирующему с датчиком, и упругий пружинный механизм, способный воздействовать на толкатель и находящийся в рабочем контакте с приводной штангой.
55. Каверномер по п.54, в котором упругий пружинный механизм является цилиндрической винтовой пружиной.
56. Каверномер по п.54, в котором датчик представляет собой датчик положения.
57. Каверномер по п.56, в котором датчик положения представляет собой линейный потенциометр или линейно-регулируемый дифференциальный измерительный преобразователь.
58. Каверномер по п.54, дополнительно содержащий, по меньшей мере, один датчик, расположенный на конце, по меньшей мере, одного рычага.
59. Каверномер по п.58, в котором, по меньшей мере, один датчик представляет собой датчик силы.
60. Каверномер по п.54, способный выполнять регистрацию измерений датчиком в зависимости от глубины.
61. Каверномер по п.54, дополнительно содержащий закрывающий механизм.
62. Каверномер по п.61, в котором закрывающий механизм представляет собой соединительную раму, соединительный рычаг, пластинчатую пружину или листовую рессору.
63. Каверномер по п.54, дополнительно содержащий, по меньшей мере, один механизм быстрого закрытия и открытия.
64. Каверномер по п.54, дополнительно содержащий датчик относительного азимута.
65. Каверномер по п.64, способный выполнять регистрацию измерений датчиком относительного азимута в зависимости от глубины.
66. Устройство, предназначенное для использования в стволе скважины, содержащее множество рычагов, и механизм быстрого закрытия и открытия, имеющий, по меньшей мере, один рычаг, присоединенный к опоре с возможностью поворота, и противоположный толкатель, предназначенный для перемещения рычага вокруг оси поворота, при этом механизм быстрого закрытия и открытия способен воздействовать на, по меньшей мере, один рычаг.
67. Способ позиционирования скважинного инструмента в стволе скважины, включающий в себя следующие операции:
размещение в стволе скважины инструмента, имеющего удлиненный корпус, множество рычагов, каждый из которых присоединен к отдельному толкателю, приводную штангу, содержащую соединительный стержень и соединительный элемент, двигатель, выполненный с возможностью сообщения усилия приводной штанге, и, по меньшей мере, один упругий пружинный механизм, находящийся в рабочем контакте с приводной штангой и способный воздействовать на, по меньшей мере, один толкатель, приведение в действие двигателя для перемещения приводной штанги с целью ввода ее в рабочий контакт с, по меньшей мере, одним толкателем, перемещение, по меньшей мере, одного толкателя для выдвигания, по меньшей мере, одного рычага для контакта с поверхностью ствола скважины.
68. Способ измерения ствола скважины, включающий в себя следующие операции:
размещение в стволе скважины скважинного устройства, содержащего удлиненный корпус, приводную штангу, имеющую соединительный стержень и соединительный элемент, двигатель, способный сообщать усилие приводной штанге, и множество рычажных систем, каждая из которых содержит рычаг, выполненный с возможностью выдвигания его наружу из корпуса устройства и присоединенный с возможностью поворота к толкателю, контактирующему с датчиком, и упругий пружинный механизм, способный воздействовать на толкатель и находящийся в рабочем контакте с приводной штангой, определение отдельно исходного положения каждого рычага посредством использования датчика и создание, таким образом, сигнала исходного положения для каждого рычага, выдвигание рычагов для ввода их в контакт с поверхностью ствола скважины, определение отдельно выдвинутого положения каждого рычага посредством использования датчика, создание сигнала выдвинутого положения для каждого рычага, обработка сигналов исходного положения и сигналов выдвинутого положения для измерения параметров поверхности ствола скважины.
Приоритет по пунктам:
18.06.2004 по пп.1-68.

