ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
1. Область техники, к которой относится изобретение
Настоящее изобретение в целом относится к скважинным инструментам нефтяных месторождений, а в частности к скважинным линейным двигателям.
2. Предшествующий уровень техники
Во время строительства, заканчивания, повторного освоения, капитального ремонта, текущего ремонта, эксплуатации и в конечном итоге при ликвидации скважины используются разные скважинные инструменты. Например, для формирования буровой скважины используются буровые ставы или "компоновка низа бурильной колонны" или ("КНБК"). КНБК содержит сложное оборудование: направляющие механизмы, толкатели, тяговые устройства, регулируемые центраторы и т.д. В операциях по заканчиванию скважины используются золотниковые клапаны, обжимки, ловильные инструменты, устройства извлечения и т.д. Кроме того, в процессе добычи устройства, например насосы, размещаются внутри скважины, способствуя отдаче углеводородов.
Настоящее изобретение удовлетворяет потребность в эффективных приводных системах для этих и других скважинных механизмов и оборудования.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
В одном варианте осуществления, предлагается устройство для использования в буровой скважине. Устройство содержит ротор, по меньшей мере, с одним набором магнитных элементов, и цилиндрический статор, ток в обмотке которого, течет поперек продольной оси статора. Полярность каждого магнитного элемента ротора способна меняться вдоль продольной оси ротора. Статор находится в скользящем контакте с ротором. Статор имеет сердечник, набранный, по меньшей мере, частично из пластин, выровненных вдоль плоскости, лежащей в одной плоскости с продольной осью статора. Возбуждение обмотки вызывает относительное скольжение между ротором и статором.
В одном варианте осуществления, предлагается способ для осуществления работ в буровой скважине. Способ представляет собой формирование, по меньшей мере, одного линейного двигателя, спуск линейного двигателя в ствол скважины и манипулирование скважинным инструментом путем активации линейного двигателя.
Примеры некоторых признаков изобретения, таким образом, обобщены достаточно широко в целях их лучшего понимания в нижеследующем подробном описании и оценки вклада в усовершенствование существующей техники. Существуют дополнительные признаки изобретения, описанные ниже, которые составляют предмет формулы изобретения, прилагаемой к настоящему документу.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Для лучшего понимания настоящего описания сделаны ссылки на следующее подробное описание вариантов осуществления изобретения, которые следует рассматривать совместно с прилагаемыми чертежами, где одинаковые позиции, как правило, обозначены одинаковыми цифрами.
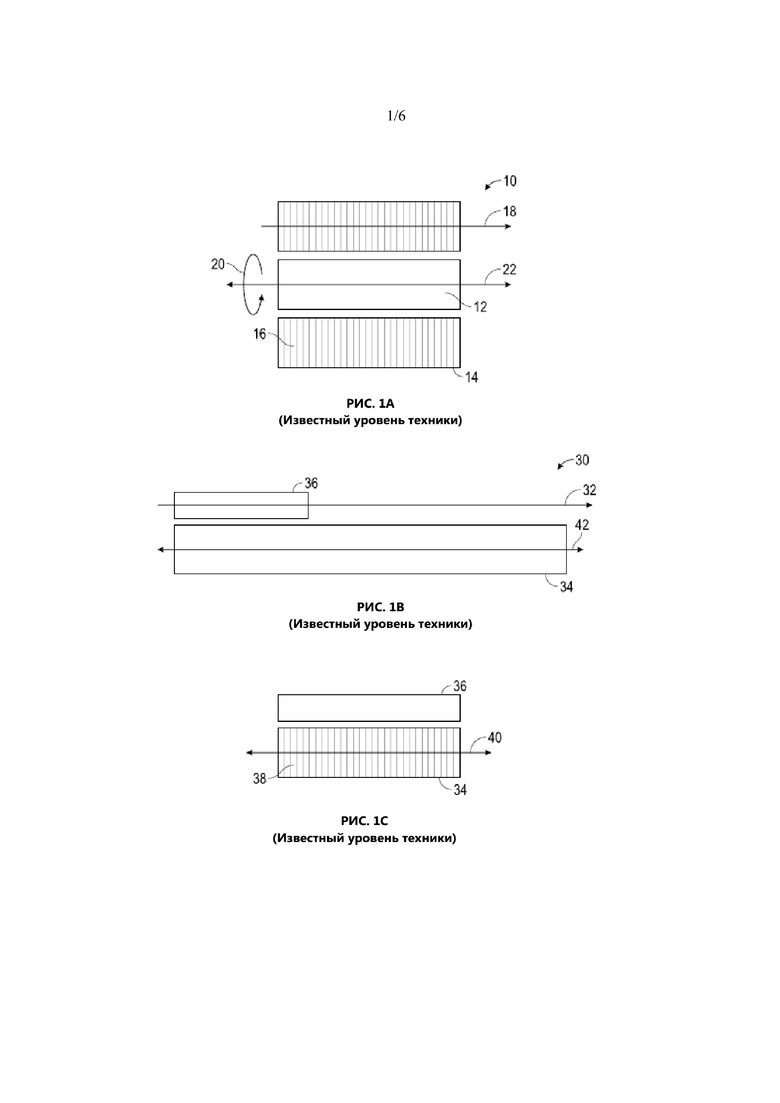
На ФИГ. 1А представлено схематическое изображение роторного электродвигателя известного уровня техники.
На ФИГ. 1B-C представлено схематическое изображение линейного электродвигателя известного уровня техники.
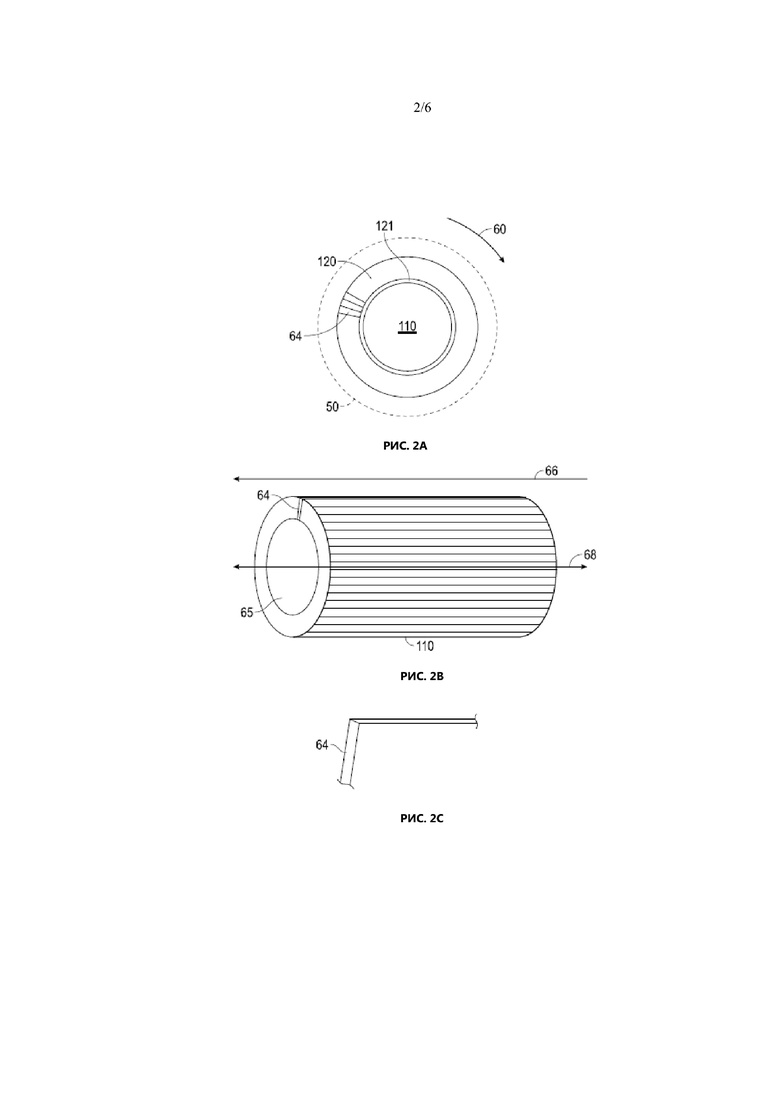
На ФИГ. 2A-B представлен один вариант осуществления линейного электродвигателя в соответствии с настоящим изобретением.
На ФИГ. 2C представлен один вариант осуществления сердечника, выполненного в соответствии с настоящим изобретением, в котором ротор окружает статор.
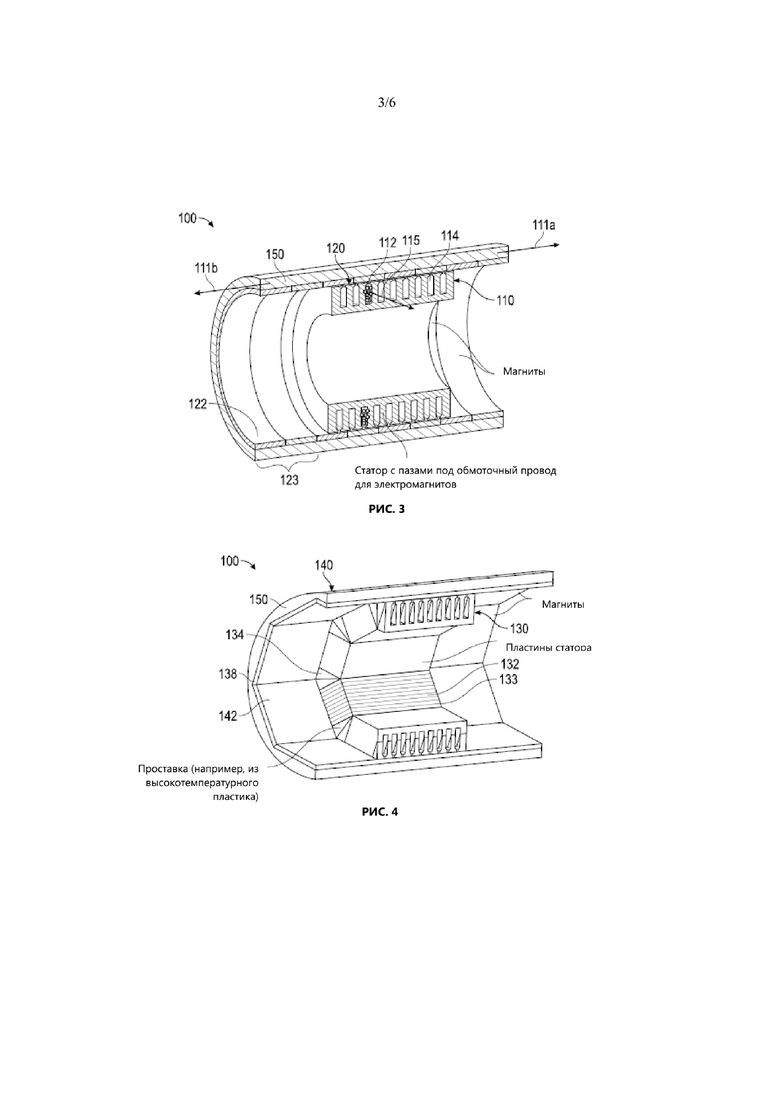
На ФИГ. 3 представлен один вариант осуществления линейного электродвигателя в соответствии с настоящим изобретением, в котором плоские тела используются для магнитных элементов и пластинчатых накладок.
На ФИГ. 4 представлен один вариант осуществления линейного электродвигателя в соответствии с настоящим изобретением, который использует плоские элементы внутри статора и ротора.
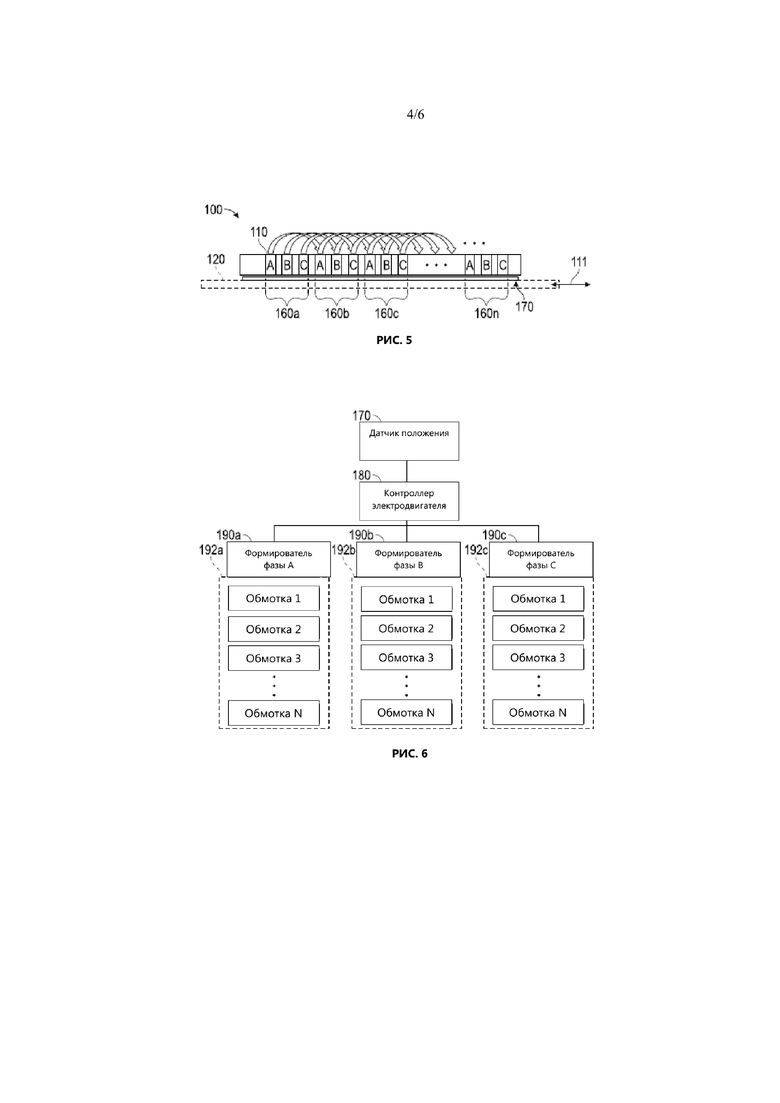
На ФИГ. 5 представлен один вариант осуществления линейного электродвигателя увеличенной мощности, в соответствии с настоящим изобретением.
На ФИГ. 6 представлено функционирование системы управления для варианта осуществления изобретения, представленного на Фиг.5.
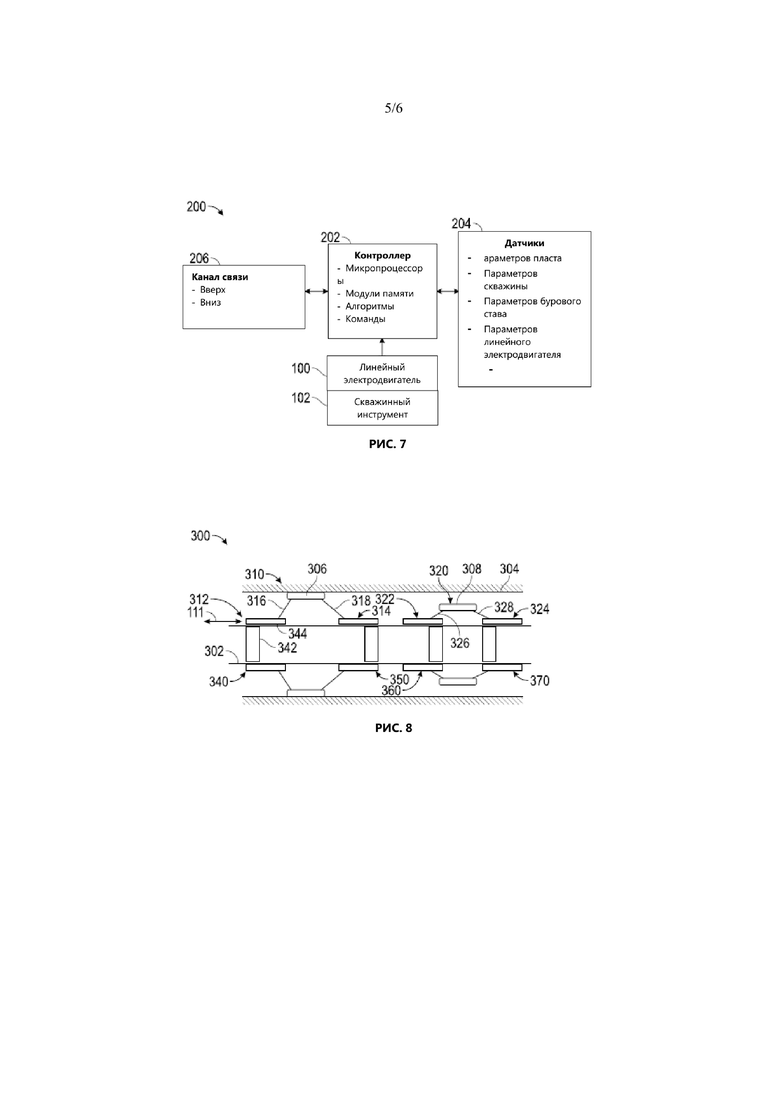
На ФИГ. 7 представлено функционирование системы по размещению скважинного инструмента, использующей линейный электродвигатель, выполненный в соответствии с настоящим изобретением.
На ФИГ. 8 представлено схематическое изображение тягового устройства для скважины, которое использует линейный электродвигатель, выполненный в соответствии с одним вариантом осуществления настоящего изобретения.
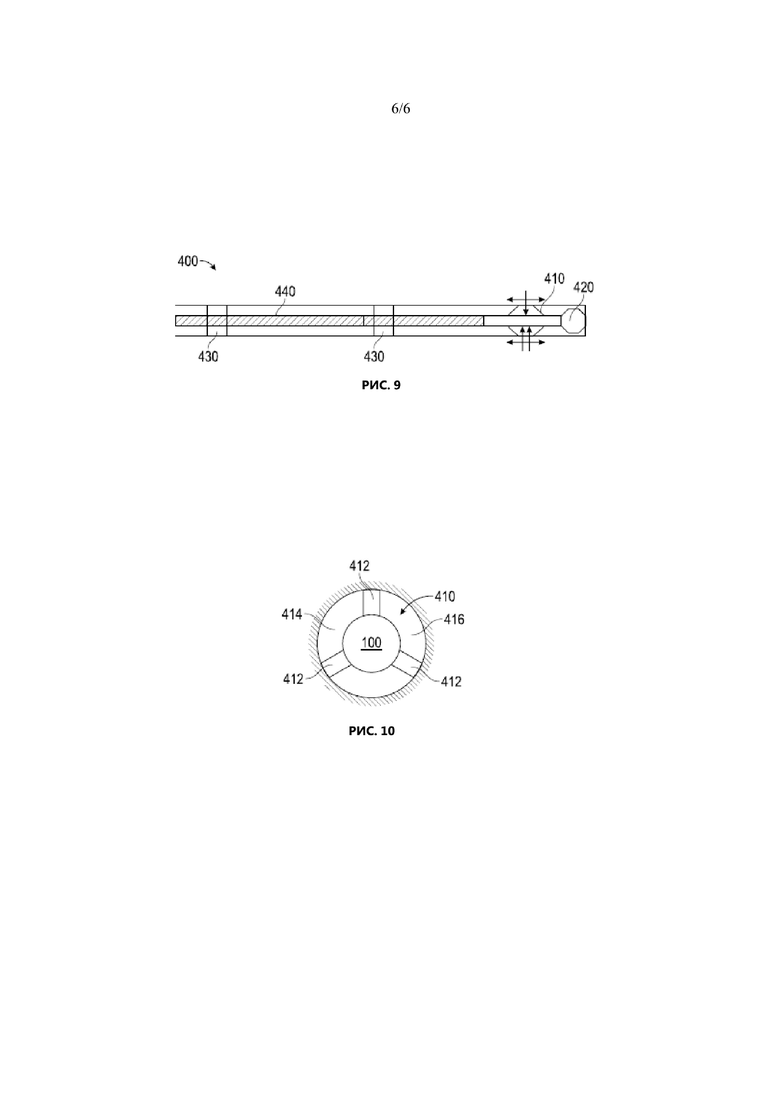
На ФИГ. 9 и 10 представлено схематическое изображение генератора аксиального давления, который использует линейный электродвигатель, выполненный в соответствии с одним вариантом осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Вариантами настоящего изобретения предлагаются электромеханические линейные приводы для надежного перемещения и приведения в действие многочисленных скважинных механизмов. В вариантах осуществления, линейные приводы, согласно настоящему изобретению, пригодны для применения в скважинных условиях, в частности, в скважинах с цилиндрическими стволами и с ограниченным пространством.
Для лучшего понимания принципов настоящего изобретения, делается ссылка на обычный роторный электродвигатель 10, показанный на Фиг. 1A. Электродвигатель 10 включает ротор 12, расположенный внутри активного статора 14. Ротор 12 содержит постоянные магниты (не показаны). Статор 14 содержит сердечник, набранный из пластин 16. Обмотки (не показаны), соединены со статором 14, постоянный ток в которых, течет в направлении положительного полюса, показанном стрелкой 18, вдоль оси электродвигателя 10. Пластины 16 уменьшают гистерезис и вихревые токи, образующиеся в результате изменения магнитного потока, за счет слоев изоляции, выполненных в поперечном направлении, относительно протекания тока по направлению стрелки 18. Обычно, когда ток течет в направлении, указанном стрелкой 18, магнитное поле создает тангенциальную силу действия магнитного поля с вектором, который заставляет ротор 12 вращаться вокруг продольной оси 22 и в направлении, показанном стрелкой 20. Используемый в данном описании термин "длинная ось" относится к продольной оси, которая параллельна стволу скважины. Длинная ось перпендикулярна поперечной оси, которая проходит от центра ствола скважины в радиальном направлении в окружающий пласт. Следует отметить, что пластины 16 ориентированы вдоль плоскости вращения.
На Фиг. 1B показан вид сбоку обычного линейного электродвигателя 30. Электродвигатель 30 способен осуществлять линейное движение, например, показанное стрелкой 32. Электродвигатель 30 содержит статор 34 и ротор 36. Ротор 36 содержит постоянные магниты (не показаны). Представленный на Фиг. 1C, статор 34 имеет сердечник, набранный из пластин 38, и обмотки (не показаны), постоянный ток в которых, течет в направлении, показанном стрелкой 40. Следует отметить, что пластины 38 ориентированы вдоль плоскости прямолинейного движения 32 (Фиг. 1B). Обычно, когда ток течет в направлении, указанном стрелкой 40, магнитное поле создает осевую силу действия магнитного поля с вектором, который заставляет ротор 12 перемещаться вдоль продольной оси 42 (Фиг. 1B) и в направлении, показанном стрелкой 32 (Фиг. 1B). Пластины 38 уменьшают гистерезис и вихревые токи, образующиеся в результате изменения магнитного потока, за счет слоев изоляции, выполненных в поперечном направлении, относительно протекания тока по направлению стрелки 40.
На Фиг. 2A, показан вид в разрезе буровой скважины 50, образованный в подземном пласте. Вообще говоря, буровые скважины 50 имеют цилиндрический профиль и, как правило, их диаметр составляет от двенадцати до четырнадцати дюймов. Таким образом, используемые в буровых скважинах 50 механизмы должны быть компактны и иметь геометрические профили, которые допускают их размещение в цилиндрическом пространстве скважины. Прямоугольные формы линейных электродвигателей, как показано на Фиг. 1В и 1С, ограничивают применяемость линейных электродвигателей в условиях скважины.
Преимущество линейных электродвигателей по настоящему изобретению состоит в использовании статора и/или ротора, способных генерировать осевое усилие и/или смещать инструмент в буровой скважине. Представленный на Фиг. 2А, линейный электродвигатель 100, в соответствии с настоящим изобретением, включает статор 110 и ротор 120. Статор 110 может представлять собой цилиндр или трубу, в отверстие 121 которой, входит трубчатый ротор 120. В не показанном альтернативном варианте осуществления, ротор 120 может представлять собой цилиндр или трубу, в отверстие которой, входит трубчатый статор 110. В любом случае, статор 110 содержит обмотки (не показаны), которые вызывают протекание постоянного тока в направлении, указанном стрелкой 60. Во многих видах подземных работ в скважине в ней циркулируют жидкости. Таким образом, статор 110 может включать в себя отверстие 65, которое служит каналом для потока бурового раствора. Отверстие 65 также может служить местом для приемного оборудования, например, электрических модулей, датчиков, контроллеров и т.д.
Как показано на Фиг. 2А, статор 110 выполнен из сердечника 64, который уменьшает гистерезис и вихревые токи, образующиеся в результате изменения магнитного потока. Например, сердечник 64 может включать слои изоляции, выполненные в поперечном направлении, относительно протекания тока по направлению стрелки 60. Сердечник 64 может выполняться из спеченного материала, в котором инкапсулированы или внедрены любым другим способом покрытые частицами магнитной стали с изоляцией стальные пластины. Как показано на Фиг. 2B, слоистая изоляция совмещена с плоскостью линейного движения ротора 120 (Фиг. 2А), которое показано стрелкой 66. На Фиг. 2С показана часть пластин 64. Как показано на Фиг. 2B-С, пластины 64 выровнены вдоль плоскости, лежащей в одной плоскости с продольной осью 68 статора 110. Следует понимать, что множество пластин 64 по окружности образуют радиальные барьеры, уменьшающие циркуляцию вихревых токов.
Со ссылкой на Фиг. 1А и Фиг. 2А-В, следует принять во внимание, что пластины 16 роторного двигателя 10 располагаются поперек продольной оси 22 ротора 12, в то время как пластины 64 линейного электродвигателя 100 параллельны продольной оси 68 ротора 120. Со ссылкой на Фиг. 1B-C и Фиг. 2А-В, следует принять во внимание, что статор 34 и ротор 36 обычного линейного электродвигателя 30 имеют прямоугольный профиль, в то время как статор 110 и ротор 120 линейного электродвигателя 100, как правило, имеют цилиндрический профиль.
На Фиг. 3, показан линейный привод 100 в соответствии с одним из вариантов осуществления настоящего изобретения. Линейный привод 100 содержит статор 110, который закреплен на корпусе инструмента (не показано). Статор 110 имеет активную первичную обмотку (напр., трехфазную обмотку), выполненную из обмоточного провода для электромагнитов 112. Протекание тока через обмотки 112 изображено стрелкой 115. Линейный привод 100 также включает ротор 120, который преимущественно перемещается в осевом направлении или вдоль длинной оси 68 (Фиг. 2В) статора 110 вдоль направлений, показанных стрелками 111a, b. Используемый в данном описании термин "преимущественно" означает, что величина скольжения вдоль длинной оси больше, чем скольжение по любой другой оси, т.е. осевое движение скольжения больше, чем любое вращательное скольжение между статором и ротором. Следует понимать, что относительное движение скольжения между статором 110 и ротором 120 является преднамеренным, с величиной, достаточной для выполнения одной или нескольких заранее определенных задач. Используемый в данном описании термин "скользящее движение" исключает "игру" или номинальное движение между двумя компонентами, которые специально не разрабатывались для выполнения одной или нескольких предварительно поставленных задач.
Ротор 120 может включать один или несколько наборов 123 закрепленных постоянных магнитов 122. Таким образом, ротор 120 не имеет проводных соединений. Постоянные магниты 122 последовательно выровнены вдоль продольной оси 68 (Фиг. 2B) и меняют свою полярность. В одном варианте осуществления постоянные магниты 112 частично или полностью выполняются из магнитного материала, например самария-кобальта, в частности Sm2Co17.
Статор 110 на Фиг. 3 использует пластины радиального типа, например пластины 64, показанные на Фиг. 2B-C. Пластины 114 могут образовываться слоями, пленками, листами, или другими тонкими носителями, которые распределены по окружности внутри статора 110. Пластины 114 ориентированы радиально, поскольку магнитный поток проходит в радиальном направлении, причем пластины 114 эффективно снижают вихревые токи. Как показано выше, пластины 114 выровнены вдоль плоскости, лежащей в одной плоскости с продольной осью 68 (Фиг. 2B) статора 110. Под этим подразумевается, что относительно большие противолежащие поверхности способны излучать наружу от длинной оси 68 (Фиг. 2В) и параллельно плоскости, которая совмещена с длинной осью 68 (Фиг. 2В). В одном из вариантов осуществления пластины 114 могут представлять собой листы из электротехнической стали. Для распределения по окружности радиально ориентированных пластин 64 (Фиг. 2B) каждый слоистый лист имеет профиль "сектора" или треугольный профиль поперечного сечения, более похожий на сектор круга.
На Фиг. 4 показан линейный приводной электродвигатель 100, имеющий многоугольный статор 130 и внешний ротор 140. Статор 130 имеет множество отдельных плоских элементов, совмещенных краями. Вариант осуществления на Фиг. 4 позволяет постоянным магнитным элементам 142 внешнего ротора 140 иметь плоский профиль. Термин "плоский" означает, что магнитные элементы выполнены в виде пластин или других тел, которые имеют, по меньшей мере, две параллельные поверхности. Магнитные элементы 142, представляющие собой магниты, сориентированы в осевом направлении и образуют профиль многоугольника с полярностью, чередующейся также в осевом направлении (не показано на чертеже), которое является направлением вдоль длинной оси 68 (Фиг. 2В). Кроме того, статор 130 может собираться из слоистого мягкого магнитного материала, в виде аксиально ориентированных полос 132, которые образуют профиль многоугольника. Слоистые структуры показаны под номером 133. Зазоры между каждой стопкой полос 132 заполнены проставками 134, изготовленными из любого непроводящего материала, например высокотемпературного пластика. Кроме того, в некоторых вариантах осуществления настоящего изобретения грани многоугольника 138 между статором 130 и подвижной внешней частью 140 могут использоваться для размещения снижающих трение элементов (не показаны), например подшипников, устройств для проверки направления и/или деталей системы определения положения.
На Фиг. 3 и 4 станина 150 используется для поддержки постоянных магнитов 122, 142, соответственно. Хотя внешняя поверхность станины 150 изображена цилиндрической, профиль станины 150 может быть, при необходимости, геометрически разнообразным, не оказывающим влияния на магнитные свойства. В одном варианте осуществления, станина 150 может представлять собой твердый кусок магнитной стали, так как частота изменения магнитного потока в нем равна нулю. Станина 150 может подсоединяться к платформе, рычагу, втулке, рукоятке, колодке или любой другой структуре, которая требует перемещения во время работы. Станина 150 может перемещаться по рельсам или направляющей, ограничивающей движение ротора 120 до заранее определенного расстояния вдоль оси. Статор 110 остается неподвижным относительно транспортирующего устройства (например, колонны бурильных труб), обеспечивая линейное движение ротора 120. Таким образом, электрическая энергия преобразуется в механическую энергию.
Следует понимать, что пластины представляют собой только один иллюстративный вариант осуществления, обеспечивающий изоляцию для снижения гистерезиса и вихревых токов. Может использоваться любая конструкция или состав материала, который эффективно уменьшает гистерезис и вихревые токи. Например, для производства подходящих профилей статора могут использоваться мягкие магнитные компоненты (SMC), которые представляют собой смесь эпоксидных наполнителей и гранулированного чугуна.
На Фиг. 5, показан следующий вариант линейного электродвигателя 100 в соответствии вариантами осуществления настоящего изобретения. Статор 110 может включать множество трехфазных обмоток 160а, 160b, 160c - 160n. Линейный электродвигатель 100 может также включать датчик 170 положения. Датчик 170 положения может представлять собой любой тип датчика, настроенного на обнаружение осевого положения ротора (не показано). Подходящие датчики положения включают в себя, не ограничиваясь, датчики LVDT, акустические датчики, оптические датчики, емкостные датчики, датчики на эффекте Холла и т.д. При использовании наборов обмоток, плотность мощности линейного электродвигателя 100 может поддерживаться даже при увеличении используемого осевого расстояния, на которое ротор 120 сможет переместиться во время работы. То есть, при использовании только одной обмотки количество обмоток на единицу длины будет уменьшаться и таким образом снижать действие магнитного поля для смещения ротора 120. Как было описано ранее, статор 110 фиксируется относительно бурового снаряда (не показан), а ротор 120 перемещается в осевом направлении, как показано стрелкой с цифрой 111.
Представленный на Фиг. 6, датчик 170 положения передает информацию, которая используется контроллером 180 для управления линейным электродвигателем 100. В одном варианте осуществления контроллер 180 может использовать сигналы от датчика 170 положения для избирательной активации формирователей фазы 190a,b,c. Каждый формирователь фазы 190a,b,c способен выборочно и последовательно подпитывать подсоединенные обмотки. Например, фаза A формирователя 190а способна последовательно подпитывать несколько обмоток 192a, количество которых варьируются от 1 до n. Таким образом, контроллер 180 может быть запрограммирован с алгоритмами начала движения или схемы движения в ответ на полученные сигналы от датчика. Например, контроллер 190 может последовательно подпитать фазы A-C первого набора обмоток, обмотки 1 и затем фазы A-C второго набора обмоток, обмотки 2 и т.д.
На Фиг. 7, показана одна, не ограничивающая объем изобретения, система 200 для использования линейного электродвигателя 100 со скважинным инструментом 102 для выполнения одной или нескольких подземных операций. Данные операции могут предприниматься во время бурения, каротажа, заканчивания, повторного освоения, капитального ремонта, текущего ремонта, эксплуатации и при ликвидации скважины. Данные задачи могут выполняться при добыче жидких сред, например жидких и/или газообразных углеводородов. Для выполнения этих операций система 200 может включать контроллер 202, один или несколько датчиков 204 и канал связи 206.
Контроллер 202 может включать известные устройства, например, один или несколько микропроцессоров для обработки информации, модули памяти для хранения данных, имитационные модели для прогнозирования поведения системы, модули связи для обмена информацией с другим оборудованием, а также связанные с ними алгоритмы. Контроллер 202 может быть запрограммирован для управления работой линейного электродвигателя 100 в соответствии с любым количеством рабочих режимов. В одном варианте осуществления, контроллер 202 может управлять линейным электродвигателем 100 автономно, в соответствии с предварительно запрограммированными командами и необязательно с предварительно запрограммированными командами. В другом варианте осуществления, контроллер 202 способен управлять линейным электродвигателем 100 командами, передаваемым дистанционно, например с поверхности. В еще одном варианте осуществления, контроллер 202 способен управлять линейным электродвигателем 100 на основе данных, собранных от приборов, размещенных в скважине. Конечно, другие варианты осуществления могут включать гибридное управление, которое сочетает автономное управление с управлением с поверхности. Компоненты и устройства системы 200 зависят от типа используемого режима работы.
Например, контроллер 200 может быть запрограммирован на использование данных, полученных от одного или нескольких датчиков 204, для управления линейным электродвигателем 100. Датчики 204 способны собирать данные под земной поверхностью, т.е. данные, относящиеся к какой-либо целевой функции или оборудованию, в том числе, не ограничиваясь, компоновке низа бурильной колонны (КНБК), пласту, скважинным флюидам или скважине. Данные, касающиеся КНБК, включают параметры: состояния, режимов, состояния различных компонентов КНБК, например износа бурового долота, перепада давления в забойном двигателе, профилей давления и температуры, вибрации, завихрений, крутящего момент, расхода бурового раствора, числа оборотов бурового долота, крутящего момента и нагрузки на долото, или осевого усилия на долото ("WOB") и др. Данные, относящиеся к пласту, включают параметры: удельного сопротивления пласта, пористости пласта, плотности пласта, проницаемости пласта, состава скальных пород, литологические особенности пласта и другие параметры, связанные с пластом и т.д. Данные, касающиеся скважинных флюидов, включают в себя такие параметры, как вязкость, сжимаемости, плотность, химический состав (газ, вода, нефть, содержание метана и т.д.). Данные, относящиеся к скважине, включают размер буровой скважины, шероховатость и трещиноватость. Данные, относящиеся к направлению буровой скважины, включают в себя такие параметры, как азимутальное положение, угол наклона и направление КНБК или бурового долота.
На основании полученной информации от датчика, контроллер 200 способен активировать или дезактивировать линейный электродвигатель 100, изменять поведение линейного электродвигателя 100, сдвигать или смещать ротор 120 (Фиг. 3) на определенную величину и т.д. Природа, степень и частота контроля зависит от конкретной ситуации и типа устройства, использующего линейный электродвигатель 100. Контроллер 202 способен управлять линейным электродвигателем 100 автономно или использовать канал связи 206 для приема сигналов управления с поверхности или другого удаленного места.
В целях иллюстрации, широкий спектр вариантов подземного использования линейных электродвигателей, в соответствии с настоящим изобретением и некоторые, не ограничивающие объем изобретения, варианты использования генерации осевого усилия и/или позиционирования оборудование описываются ниже.
На Фиг.8 представлено схематическое изображение одного варианта осуществления скважинного тягового устройства 300, которое может использоваться для перемещения колонны бурильных труб и/или КНБК 302 вдоль буровой скважины 304. Тяговое устройство 200 включает в себя первое приводное устройство 310 и второе приводное устройство 320. Первое приводное устройство 310 имеет передний исполнительный механизм 312 для радиального смещения первой колодки 306 и задний исполнительный механизм 314 для радиального смещения второй колодки 308. Передние и задние исполнительные механизмы 312, 314 имеют соответствующие рычаги 316, 318. Второе приводное устройство 220 имеет передний исполнительный механизм 322 и задний исполнительный механизм 324. Передние и задние исполнительные механизмы 322, 324 имеют соответствующие рычаги 326, 328. Рычаги 326, 328 выдвигаются в радиальном направлении за счет уменьшения расстояния между их соответствующими исполнительными механизмами и убираются за счет увеличения расстояния между их соответствующими исполнительными механизмами.
Каждый из исполнительных механизмов 312, 314, 322, 324 включает линейный электродвигатель 340, 350, 360 и 370, соответственно. Для краткости будет описан только линейный электродвигатель 340. Электродвигатель 340 содержит статор 342 и ротор 344, как описано выше. В данном варианте осуществления, статор 342 расположен внутри ротора 344. Статор 342 крепится к КНБК 302 и остается неподвижным, когда линейный электродвигатель 340 генерирует осевое усилие. Ротор 344 может устанавливаться на соответствующей направляющей (не показана), которая перемещается (смещается в осевом направлении) относительно статора 342 в направлениях стрелки 111, когда линейный электродвигатель 340 находится под напряжением. Рычаг 316 использует движения ротора 344 для радиального смещения первой колодки 306, что описано более подробно ниже.
Передний исполнительный механизм 312 способен выдвигать колодку 306 радиально наружу, когда один ротор линейных электродвигателей 340 и 350 скользит к другому, или оба ротора скользят к другому. Колодка 306 убирается обратно, когда один ротор линейных двигателей 340 и 350 отдаляется от другого или оба ротора отдаляются от другого. Путем последовательного сцепления и расцепления колодок 306 и 308, тяговое устройство 300 способно приводить в движение КНБК 302 вдоль скважины 302.
Приводные устройств 310, 320 могут активироваться попеременно гусеничной последовательностью движений, что позволяет осуществлять непрерывное движение при менее чем максимальном усилии всех приводных устройств 310, 320, которые активны в данный момент времени. Кроме того, при одновременной работе обоих приводных устройств 310, 320 максимально возрастает тяговое усилие. Тяговое устройство 300 может иметь одно приводное устройство, три или больше приводных устройств. Следует отметить, что тяговое устройство 300 представляет собой модульный механизм и может включать любое количество приводных устройств, необходимых для создания требуемого эксплуатационного тягового усилия. Следует также отметить, что тяговое устройство 300 может использоваться для создания локальных нагрузок (WOB) на долото 420 (Фиг. 9).
Тяговое устройство 100 способно выполнять другие функции, например, стабилизирующие или центрирующие для направления тягового устройства 100 через обсадную трубу скважины или через часть необсаженной скважины. Тяговое устройство 100 может использоваться совместно с буровым ставом, который включает в себя датчики азимутального направления скважины, контроллеры, двусторонние системы связи, электрические генераторы, аккумуляторы и т.д.
На Фиг. 9 представлена компоновка низа бурильной колонны (КНБК) 400, которая использует линейный электродвигатель 100 для приведения в действие устройства 410 управления азимутом, которое избирательно позиционирует скважинное оборудование, например, буровое долото 420. КНБК представляет собой оборудование, спускаемое в скважину и содержащее, не ограничиваясь, приборы скважинного каротажа, инструменты для внутрискважинной обработки, прижимные зонд с направленной характеристикой, инструменты опробования пластов или отбора образцов и инструменты оценки параметров продуктивного пласта. КНБК 300 может включать один или несколько центраторов 430, которые удерживают транспортирующее устройство, например, колонну бурильных труб 440. Центраторы 430 могут располагаться стационарно или вращаться относительно транспортирующего устройства 340. Центраторы 430 могут представлять собой стационарные лопатки, регулируемые стабилизаторы или ролики. Транспортирующее устройство 440 способно осуществлять электрические и механические функции и выполняется как: бурильная труба с телеметрией бурового раствора; жесткий носитель; сигналопроводящая бурильная труба; гибкая труба; насосно-компрессорная труба; нежесткий носитель; кабель; электрическая линия (эл.-линия); стальной трос малого диаметра.
На Фиг. 10 показан вид с торца устройства 410 управления азимутом. Устройство 410 управления азимутом содержит расширяемые колодки по типу колодок 306 и 308. Устройство 410 управления азимутом выполняется на втулке, которая остается практически неподвижной относительно стенки 414 ствола скважины, в то время как колонна бурильных труб, на которую она установлена, вращается. Данные втулки иногда упоминаются как невращающиеся втулки. Невращающаяся втулка может использоваться для других инструментов, встроенных в линейный электродвигатель. В одном варианте осуществления, устройство 410 управления азимутом может иметь один или несколько рычагов 412, которые способны вместе или по отдельности раздвигаться и вступать во взаимодействие со стенкой 414 скважины. Как показано, устройство 410 управления азимутом имеет три рычага 412, разнесенных по окружности с интервалом в сто двадцать градусов. Линейный электродвигатель 100 может использоваться для приведения в действие рычагов 412, как это описано для устройства 300 на Фиг. 8. В некоторых вариантах осуществления, каждый из рычагов 412 может приводиться в действие отдельным электродвигателем. Таким образом, каждый рычаг 412 может выдвигаться на различное расстояние в радиальном направлении. Независимое действие рычагов 412 позволяют КНБК 400 (Фиг. 9) размещаются в скважине 416 с эксцентриситетом. Такое позиционирование с эксцентриситетом может использоваться для "нацеливания" бурового долота 420 (Фиг. 9) в требуемом направлении для бурения или размещения датчика для оптимального измерения одного или нескольких параметров, связанных с пластом, скважиной 416, затрубным пространством, например, обсадной трубой (не показана). Кроме того, устройство 410 управления азимутом способно также генерировать осевое усилие во время направления бурового долота 420 (Фиг. 9) в требуемом направлении.
В варианте осуществления, показанном на Фиг. 10, он выполнен как раздвижной расширитель ствола скважины. В таких вариантах осуществления, один или несколько рычагов 412 могут иметь резец или режущий элемент для резки, создания трещиноватости или разрушения стенки 414 скважины. Роторы используются для осуществления скольжения рычагов по направляющим, которые выдвигают режущие элементы наружу в радиальном направлении. Линейный электродвигатель 100 может использоваться для активации всех рычагов 412 вместе или по отдельности.
В других, не показанных вариантах осуществления, линейный электродвигатель 100 использоваться для приведения в действие насосов, которые используются для извлечения флюидов из скважины. Эти насосы могут использоваться для добычи углеводородов или удаления сопутствующих жидкостей, например воды или соляного раствора. В других вариантах осуществления линейный электродвигатель 100 может использоваться для приведения в действие инструментов для внутрискважинной обработки. Например, линейный электродвигатель 100 может использоваться для расширения захватывающих элементов или другие устройств, взаимодействующих со скважинным оборудованием. Захватывающие элементы могут использоваться для извлечения инструмента или обсадной колонны, "вылавливания" оборудования из скважины, приведения в действие скользящих муфт, устройств гидравлического сжатия, активации расширителей / раздвижных расширителей ствола скважины / инструментов отбора проб, приводов клапанов, активации или дезактивации пакеров. В целом линейный электродвигатель 100 способен приводить в действие скважинный инструмент, исполняющий определенную функцию под землей. Эти функции могут проявляться естественно (скальная порода или грунт) или как инженерные особенности (например, трубы, муфты, и т.д.).
Поскольку упомянутое выше описание направлено на некоторые, не ограничивающие объем настоящего изобретения, иллюстративные примеры осуществления, возможны различные модификации, очевидные специалистам в данной области техники. Предполагается, что все варианты осуществления, в пределах объема и сущности прилагаемой формулы изобретения, охватываются упомянутым выше описанием.
Группа изобретений относится к скважинным линейным электродвигателям. Устройство, используемое в буровой скважине, содержит ротор (12), по меньшей мере, с одним набором магнитных элементов, расположенных так, что полярность каждого из них меняется вдоль продольной оси ротора (12), и цилиндрический статор (14), размещенный с возможностью скольжения внутри ротора (12), выполненный с возможностью протекания в его обмотке тока поперек продольной оси статора (14), и имеющий сердечник (64), по меньшей мере частично набранный из пластин (38), выровненных вдоль плоскости, лежащей в одной плоскости с продольной осью статора (14). Возбуждение обмотки вызывает относительное скольжение между ротором (12) и статором (14), по существу, вдоль продольной оси ротора (12), а сердечник (64) содержит несколько распределенных по окружности плоских накладок (132), каждая из которых формируется пластинами (38). Обеспечивается надежное перемещение и приведение в действие многочисленных скважинных механизмов. 2 н. и 11 з.п. ф-лы, 14 ил.
1. Устройство, используемое в буровой скважине и содержащее:
- ротор (12) по меньшей мере с одним набором магнитных элементов, расположенных так, что полярность каждого из них меняется вдоль продольной оси ротора (12); и
- цилиндрический статор (14), размещенный внутри и с возможностью скольжения внутри ротора (12), выполненный с возможностью протекания в его обмотке тока, поперек продольной оси статора (14), и имеющий сердечник (64), по меньшей мере, частично набранный из пластин (38), выровненных вдоль плоскости, лежащей в одной плоскости с продольной осью статора (14),
причем возбуждение обмотки вызывает относительное скольжение между ротором (12) и статором (14), по существу, вдоль продольной оси ротора (12), а
сердечник (64) содержит несколько распределенных по окружности плоских накладок (132), каждая из которых формируется пластинами (38).
2. Устройство по п. 1, отличающееся тем, что имеется несколько распределенных по окружности непроводящих проставок (134), по меньшей мере одна из которых разделяет по меньшей мере две из нескольких плоских накладок (132).
3. Устройство по п. 1, отличающееся тем, что сердечник (64), по меньшей мере, частично выполнен из спеченного материала.
4. Устройство по п. 1, отличающееся тем, что магнитные элементы одинаковой полярности выполнены на плоских телах, которые распределены по окружности внутри ротора (12).
5. Устройство по п. 1, отличающееся тем, что статор (14) содержит по меньшей мере одну многофазную обмотку, выполненную последовательно вдоль продольной оси статора (14), и тем, что:
по меньшей мере один многофазный привод соединен по меньшей мере с одной многофазной обмоткой;
по меньшей мере один датчик положения отслеживает положение ротора (12) относительно по меньшей мере одной многофазной обмотки; и
контроллер, получает данные по меньшей мере, от одного датчика положения для активации по меньшей мере одного многофазного привода и последовательно возбуждает по меньшей мере одну многофазную обмотку.
6. Устройство по п. 1, отличающееся тем, что статор (14) содержит несколько многофазных обмоток, выполненных последовательно вдоль продольной оси статора (14), и тем, что:
по меньшей мере один многофазный привод соединен с несколькими многофазными обмотками;
по меньшей мере один датчик положения отслеживает положение ротора (12) относительно нескольких многофазных обмоток; и
контроллер получает данные по меньшей мере от одного датчика положения для активации по меньшей мере одного многофазного привода и последовательно возбуждает каждую из нескольких многофазных обмоток.
7. Устройство по п. 1, отличающееся тем, что:
- по меньшей мере один датчик оценивает подземный исследуемый параметр; и
- по меньшей мере один контроллер получает данные, по меньшей мере, от одного датчика для управления линейным электродвигателем.
8. Устройство по п. 1, отличающееся тем, что компоновка низа бурильной колонны содержит по меньшей мере одну колодку, входящую в зацепление со стенкой буровой скважины, причем ротор (12) функционально связан по меньшей мере с одной колодкой, и осевое смещение ротора (12) вызывает радиальный сдвиг по меньшей мере одной колодки.
9. Способ для осуществления операций в буровой скважине, отличающийся тем, что:
- формируют скважинный инструмент по меньшей мере с одним линейным электродвигателем, причем линейный электродвигатель содержит:
- ротор (12) по меньшей мере с одним набором магнитных элементов, расположенных так, что полярность каждого из них меняется вдоль продольной оси ротора (12); и
- цилиндрический статор (14), размещенный с возможностью скольжения внутри ротора (12), причем ток в обмотке статора (14) течет поперечно продольной оси статора (14), статор (14) имеет сердечник (64), по меньшей мере, частично набранный из пластин (38), выровненных вдоль плоскости, лежащей в одной плоскости с продольной осью статора (14), и возбуждение обмотки вызывает относительное скольжение между ротором (12) и статором (14), по существу, вдоль продольной оси ротора (12), причем сердечник (64) содержит несколько распределенных по окружности плоских накладок (132), каждая из которых формируется пластинами (38);
- опускают скважинный инструмент в ствол скважины; и
- приводят в действие скважинный инструмент активацией линейного электродвигателя.
10. Способ по п. 9, отличающийся тем, что статор (14) содержит по меньшей мере одну многофазную обмотку, выполненную последовательно вдоль продольной оси статора (14), по меньшей мере один однофазный привод, соединенный по меньшей мере с одной многофазной обмоткой, и тем, что:
осуществляют отслеживание положения ротора (12) относительно по меньшей мере одной многофазной обмотки; и
осуществляют последовательное возбуждение контроллером каждой обмотки по меньшей мере из нескольких многофазных обмоток, который получает данные по меньшей мере от одного датчика положения для активации по меньшей мере одного однофазного привода.
11. Способ по п. 9, отличающийся тем, что используют по меньшей мере один датчик положения.
12. Способ по п. 9, отличающийся тем, что:
- осуществляют оценку подземного исследуемого параметра по меньшей мере одним датчиком; и
- осуществляют управление линейным электродвигателем по меньшей мере одним контролером, получающим данные по меньшей мере от одного датчика.
13. Способ по п. 9, отличающийся тем, что скважинный инструмент представляет собой тяговое устройство, посредством которого осуществляют перемещение компоновки низа бурильной колонны в буровой скважине.
| US 5734209 A1, 31.03.1998 | |||
| УСТРОЙСТВО ДЛЯ БУРЕНИЯ СКВАЖИН | 1991 |
|
RU2021463C1 |
| Перекатываемый затвор для водоемов | 1922 |
|
SU2001A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |

