Перекрестная ссылка на связанную заявку
Эта заявка является продолжением заявки на патент США №60/287050 от 27 апреля 2001 г.
Область техники
Настоящее изобретение относится к регуляторам и, более конкретно, к интеллектуальному регулятору с функциями ввода/вывода.
Предшествующий уровень техники
При управлении потоком жидкости в промышленных процессах, таких как нефтяные или газовые системы трубопроводов, химические процессы и т.д., часто необходимо снижать и управлять давлением флюида. Для этих задач обычно используются регуляторы, которые обеспечивают ограничение потока через регулятор. Назначением регулятора в данной заявке может быть управление скоростью потока или другими переменными процесса, но ограничение по существу - это уменьшение давления, как побочный параметр при управлении потоком.
В качестве примера использования регулятора является передача и распределение природного газа. Система распределения природного газа обычно включает сеть трубопроводов, проходящую от месторождения природного газа до одного или более потребителей. Чтобы передавать большие объемы газа, газ сжимают до более высокого давления. Когда газ доходит до распределительной сети и, в конечном счете, до потребителя, на станции понижения давления уменьшают давление газа. На станциях понижения давления обычно используются регуляторы, чтобы уменьшать давления газа.
Существенным свойством систем распределения природного газа является возможность подавать достаточные объемы газа потребителям. Давление в системе, размер трубопровода и регуляторы обычно определяют емкость системы, причем емкость системы оценивается с использованием имитационной модели. Точность модели системы определяется с использованием данных потока в различных входных точках, точках уменьшения давления и выходных точках. Точки уменьшения давления существенно влияют на емкость системы распределения газа, и, следовательно, имитация точек уменьшения давления является важной для модели системы. Однако эти точки уменьшения давления находятся внутри системы распределения и, следовательно, не считаются точками передачи, т.е. точками, в которых управление потоком газа переключается из системы распределения к потребителю. В результате измерение потока обычно нельзя осуществить в точках уменьшения давления. Кроме того, поскольку точки уменьшения давления не являются точками передачи, не требуются дополнительные расходы для повышения точности. Проблемы измерения потока, подобные проблемам, описанным выше при распределении природного газа, имеют место и в других случаях использования регулятора, например промышленных процессах, химических процессах и т.д.
Кроме того, регуляторы дают сбой из-за износа во время работы, что уменьшает способность управления давлением вдоль трубопровода. Поврежденный регулятор может привести к утечке жидкости, что увеличит расход жидкости и, возможно, приведет к аварийной ситуации. Поврежденные регуляторы могут быть починены или заменены, но часто трудно обнаружить, где отказал регулятор, или определить, какой регулятор поврежден. Обнаружение отказа и определение, какой регулятор отказал, является наиболее трудным в системе доставки природного газа, где трубопроводы могут проходить несколько миль. Таким образом, необходимо устройство, которое обнаруживает отказ и идентифицирует местоположение отказа.
Кроме того, распределенные системы управления все больше и больше используются для управления промышленными системами. В распределенной системе управления управление частями системы газопровода выполняется внутри каждого из соответствующих элементов путем обработки внутри элементов. Однако центральный контроллер (блок управления), который взаимодействует с элементами, используется для того, чтобы принимать решения по управлению для системы в целом, программировать элементы системы, выполнять мониторинг функций системы и быть связующим звеном управления между элементами системы. Таким образом, несмотря на то, что современные системы распределенного управления обеспечивают некоторую степень автономности для элементов системы, центральный контроллер все же поддерживает относительно высокую степень управления, особенно при посредничестве между элементами системы.
Краткое описание чертежей
В дальнейшем изобретение поясняется описанием предпочтительных вариантов воплощения со ссылками на сопровождающие чертежи, на которых:
фиг.1 изображает блок-схему интеллектуального регулятора давления флюида с возможностями ввода/вывода согласно изобретению;
фиг.2 - блок-схему системы управления потоком флюида, в которой использован интеллектуальный регулятор, согласно изобретению.
Подробное описание предпочтительных вариантов воплощения изобретения
Интеллектуальный регулятор флюида, используемый в промышленном процессе, имеет встроенные блоки обработки, чтобы самостоятельно управлять подачей флюида, выполняемой регулятором посредством мониторинга внутренних состояний регулятора. Регулятор также имеет функцию ввода/вывода, чтобы посылать сигналы к другим внешним элементам промышленной установки и принимать сигналы от них. Регулятор может использовать принятые сигналы, чтобы дополнительно улучшать процесс самостоятельного управления путем учета принятой информации. Регулятор может дополнительно использовать принятые сигналы для того, чтобы выполнять мониторинг устройств, внешних по отношению к регулятору, и, кроме того, генерировать сигналы, которые регулятор будет посылать для управления внешними устройствами, которые являются элементами промышленного процесса. Это позволяет уменьшить требования к емкости для центральной обработки с помощью распределения управления элементами в процессе для более локализованного управления с помощью других интеллектуальных элементов системы.
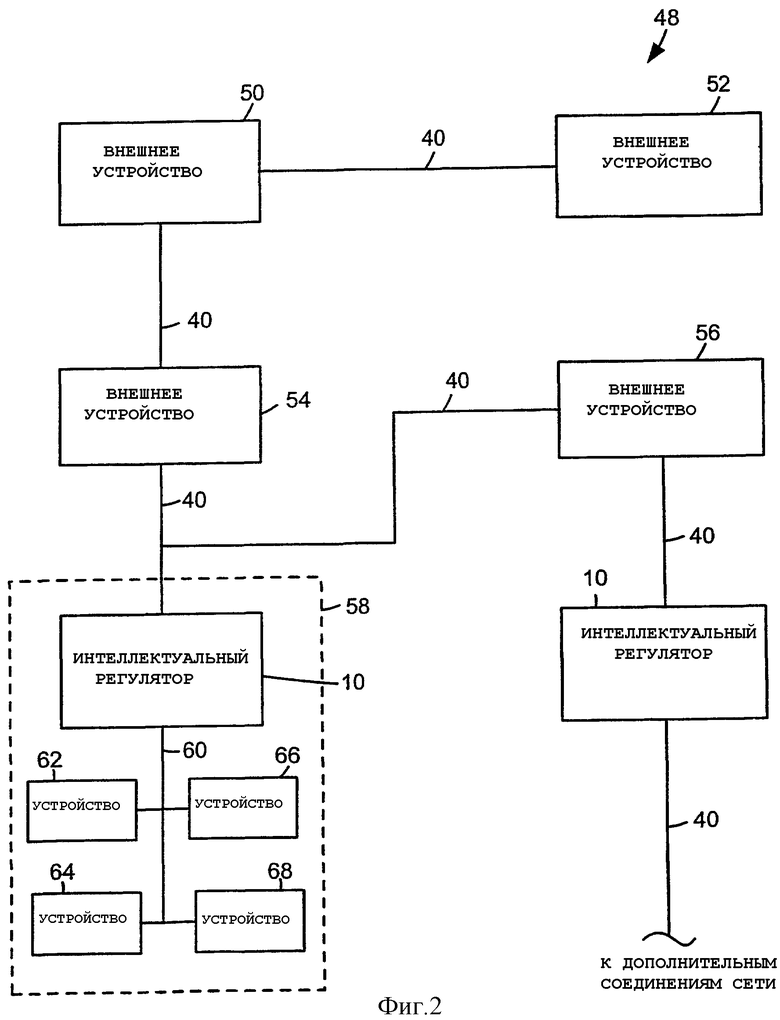
На фиг.1 представлена блок-схема интеллектуального регулятора 10 давления флюида, такого как регуляторы давления газа или жидкости, имеющего функции ввода/вывода. Регулятор 10 содержит блоки для измерения потока флюида в канале потока флюида, таком как газопровод, и процессор для передачи данных ввода/вывода и внутренних вычислений. Блоки для измерения потока флюида содержат устройства для измерения степени давления и устройства для измерения степени открытия отверстия. Выходные сигналы этих устройств используются для вычисления потока и другой информации.
Регулятор 10 (фиг.1) содержит корпус 12, который соединен с расположенным выше по потоку трубопроводом 14 и расположенным ниже по потоку трубопроводом 16. Отверстие (не показано) внутри корпуса 12 регулятора создает поток между расположенным выше по потоку трубопроводом 14 и расположенным ниже по потоку трубопроводом 16. Внутри отверстия размещен диск клапана (не показан), который перемещается по сигналу управления так, чтобы закрывать или частично закрывать отверстие, т.е. реализовать переменную апертуру для потока флюида через отверстие таким образом, чтобы регулировать поток флюида между расположенным выше по потоку трубопроводом 14 и расположенным ниже по потоку трубопроводом 16. Управление перемещением диска клапана выполняется с помощью дросселирующего элемента 18 через стержень 20, прикрепленный к диску клапана и перемещающий диск клапана. Дросселирующий элемент 18 может приводиться в действие пневматически с использованием давления из расположенного ниже по потоку трубопровода 16 через ряд соединителей 22, 24, соединенных с трубопроводом, или от другого источника энергии, например источника электроэнергии или привода электродвигателя. Корпус 12 регулятора и принцип действия являются только примерами, и могут быть использованы другие управляемые типы регуляторов, известные специалистам в данной области техники.
Датчик 26 перемещения соединен с дросселирующим элементом 18 для определения положения дросселирующего элемента 16, когда он приводит в действие стержнь 20. Датчик 26 перемещения, в свою очередь, подает в процессор 28 сигнал, представляющий положение дросселирующего элемента 18. Принимая во внимание конкретную геометрию диска клапана, процессор 28 использует этот сигнал для определения области потока в регуляторе 12. Датчик 16 может содержать, например, датчик Холла, а также другие типы датчиков положения, известные в данной области техники для определения положения дросселирующего элемента 18. Альтернативно положение диска клапана может быть определено непосредственно с помощью радарных приемопередатчиков, лазерных датчиков или ультразвуковых датчиков.
Датчики давления установлены выше по потоку и ниже по потоку по отношению к корпусу 12 регулятора, чтобы измерять уровни давления выше по потоку и ниже по потоку. Датчик 30 давления, расположенный выше по потоку, предназначен для определения давления в трубопроводе 14 выше по потоку через трубопровод 32, связанный по давлению с трубопроводом 14. Датчик 34 давления, расположенный ниже по потоку, предназначен для определения давления ниже по потоку в трубопроводе 16 через трубопровод 22, связанный по давлению с трубопроводом 16. Сигналы из датчиков 30, 34 давления подаются в процессор 28.
Процессор 28 встроен в регулятор 10. Это объединение позволяет выполнять обработку регулятором 28, т.е. локально выполнять различные функции мониторинга, вычисления и управления. Например, процессор 28 принимает сигналы из датчиков 30, 34 давления и датчика 26 перемещения. На основании принятых сигналов процессор 28 может определить, например, поток через переменное отверстие в корпусе 12 регулятора в соответствии с любым известным уравнением или алгоритмом вычисления потока (который может храниться в памяти 44 процессора) и использовать это определение для принятия решения для управления регулятором 10 или другими внешними устройствами.
Блок 36 связи (фиг.1) также размещен в корпусе 10 регулятора. Блок 36 содержит блок 38 приема сигналов, введенных в регулятор 12 из внешних устройств по линии связи или сети 40. Блок 38 приема сигналов передает принятые сигналы в процессор 28. Кроме того, блок 36 связи содержит блок 42 передачи сигналов, связанный с процессором 28, который передает сигналы из процессора 28 по линии связи или сети 40 в одно или более внешних устройств. Альтернативно вместо отдельных блоков 38, 42 приема и передачи в блоке 36 связи может быть использован один приемопередатчик (не показан) для приема и передачи сигналов. Блок 36 связи может быть сконфигурирован так, чтобы принимать аналоговые сигналы 4-20 миллиампер, цифровые сигналы, сигналы пакетного протокола, импульсные сигналы и пневматические сигналы.
Процессор 28 принимает сигналы, введенные из блока 36 связи, при этом процессор 28 сконфигурирован таким образом, чтобы выполнять ряд функций на основании типа принятого сигнала. Если сигнал принят из блоков, таких как блоки измерения температуры, сейсмические блоки, датчики уровня, блоки катодной защиты и т.д., процессор 28 может выполнять мониторинг входных данных и запоминать эти данные в памяти 42, связанной с процессором 28, в памяти 44, расположенной либо внутри процессора 28, как показано, либо вне процессора 28 (не показано). Функции мониторинга могут включать в себя маркированные записи времени сопровождения и/или длительности выбранных параметров производительности, ошибок, аномалий и т.д. Другими типами принятых сигналов могут быть сигналы команд или сигналы запросов, принятые из других регуляторов, включая интеллектуальные регуляторы, других внешних устройств или центрального контроллера или компьютера. Следовательно, процессор 28 сконфигурирован таким образом, чтобы реагировать на внешние управляющие сигналы, которые либо изменяют работу регулятора 10, изменяют характеристики заранее определенной зависимости или алгоритма, как упомянуто ранее, изменяют программное обеспечение или встроенные программы в процессоре 28, либо компонуют информацию, передаваемую в ответ на запрос информации или данных, например информацию о статусе.
Процессор 28 также сконфигурирован таким образом, чтобы выводить сигналы в одно или более внешних устройств через блок 36 связи и сеть 40. Типы сигналов, которые могут быть сформированы и выведены, включают сигналы команд управления и сигналы специфических установок устройств для управления другими внешними устройствами, связанными с регулятором 10 через сеть 40. Сеть может содержать сеть протокола, основанного на пакетах, для которой нужен один кабель, или может иметь многочисленные каналы, работающие параллельно. Примеры протокола, основанного на пакетах, и других типов сетей, которые могут быть использованы, включают протокол IP, сеть Ethernet или цифровую систему управления (DCS, ЦСУ). Сеть 40 может физически содержать коаксиальный кабель, скрученную двухпроводную линию или волоконно-оптический кабель. Также процессор 28 может включать информацию об адресе в выходные сигналы, при этом одно или более адресованных устройств получателей могут распознать и принять каждый сигнал, который выведен, включающий информацию об адресе, с помощью одного или более адресованных устройств получателей, соединенных с сетью 40.
Регулятор 10 дополнительно может включать в себя модуль 46 питания для питания процессора 28 и блока 36 связи. Модуль 46 питания может подавать регулируемое напряжение для всего устройства и может снабжаться электроэнергией от любого известного источника, такого как солнечный источник электропитания, батарея, источники питания постоянного или переменного тока. Альтернативно в процессор 28 и блок 36 связи питание может подаваться через соединение 4-20 миллиампер с блоком 36 связи в сети 40.
Как указано выше, интеллектуальный регулятор 10 обычно соединен с другими внешними устройствами в промышленной системе через сеть 40. Процессор 28 в интеллектуальном регуляторе 10 сконфигурирован таким образом, чтобы осуществлять управление некоторыми из других устройств, в частности, теми устройствами, которые, например, являются локальными для регулятора 10 или находятся в той же подсистеме в промышленной системе. Примеры внешних устройств включают в себя другие регуляторы потока (включая другие интеллектуальные регуляторы), различные типы клапанов (например, клапаны управления, клапаны безопасности, клапаны включения/выключения), различные датчики (температуры, газа метана, уровня, сейсмические), системы нагревателя магистрали, передатчик, преобразователи тока/давления, системы впрыскивания пахучего вещества и системы катодной защиты, но не ограничены этими примерами.
Пример системы, использующей регулятор 10, показан на фиг.2. В системе 48 интеллектуальный регулятор 10 соединен с сетью 40. С сетью 40 связаны различные внешние устройства 50, 52, 54, 56, которые могут быть любым одним из вышеперечисленных устройств или другими возможными устройствами, использующимися в системе.
Внешнее устройство 50 может быть системой впрыскивания пахучего вещества для системы газопровода. Процессор 28 интеллектуального регулятора 10 через сеть 40 подает сигналы управления в систему впрыскивания пахучего вещества на основании определенной в регуляторе 10 скорости потока. Регулятор может передавать сигналы управления или данных, такие как сигнал, управляющий объемом пахучего вещества, впрыскиваемого в газопровод с помощью системы впрыскивания пахучего вещества, которая основана на скорости потока, определенной процессором 28.
Регулятор 10 может быть частью автономной пакетной системы 58. В этом примере сеть 60 предназначена для передачи входных сигналов из различных внешних устройств в регулятор 10. Регулятор 10, в свою очередь, может выдавать сигналы управления в различные внешние устройства 62, 64, 66, 68 в системе 58 или в другие устройства, внешние по отношению к системе 58, через сеть 40, изменять рабочие параметры самого регулятора 10 на основании принятых входных сигналов или входных переменных, используемых для внутренних вычислений в процессоре 28, который может включать в себя прием входных сигналов из монитора температуры жидкости. На основании измеренной температуры жидкости вычисляется скорость потока с использованием формулы, учитывающей температуру жидкости.
Специалистам в данной области техники понятно, что процессор 28, блок 36 связи и модуль 44 питания могут быть установлены отдельно, как показано на фиг.1, или могут быть выполнены на одной основной схемной плате, расположенной внутри корпуса регулятора 10.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО И СПОСОБ ДЛЯ ИЗМЕРЕНИЯ КОЭФФИЦИЕНТА ПОЛОЖЕНИЯ ДРОССЕЛИРУЮЩЕГО ЭЛЕМЕНТА РЕГУЛЯТОРА ДАВЛЕНИЯ | 2003 |
|
RU2344462C2 |
| САМОЦЕНТРИРУЮЩАЯ МАГНИТНАЯ СБОРКА ДЛЯ УСТРОЙСТВА ИЗМЕРЕНИЯ ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ | 2001 |
|
RU2276397C2 |
| ПРОГНОСТИКА КЛАПАНОВ В ОТНОШЕНИИ ПОЛИМЕРНЫХ КОМПОНЕНТОВ НА ОСНОВАНИИ МЕТОДОВ УСКОРЕННОГО ИСПЫТАНИЯ НА СТАРЕНИЕ | 2014 |
|
RU2665829C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УСЛОВНОГО УПРАВЛЕНИЯ ЭЛЕКТРОННЫМ РЕГУЛЯТОРОМ ДАВЛЕНИЯ | 2014 |
|
RU2661252C2 |
| СООБЩАЮЩИЙ РЕГУЛЯТОР ДЛЯ УПРАВЛЕНИЯ СИСТЕМОЙ ТРАНСПОРТИРОВКИ ГАЗА | 2002 |
|
RU2294554C2 |
| СИСТЕМА И СПОСОБ КОНТРОЛЯ ФИЗИЧЕСКОГО СОСТОЯНИЯ ЭКСПЛУАТАЦИОННОГО ОБОРУДОВАНИЯ СКВАЖИНЫ И РЕГУЛИРОВАНИЯ ДЕБИТА СКВАЖИНЫ | 2008 |
|
RU2468191C2 |
| СИСТЕМЫ И СПОСОБЫ, ИСПОЛЬЗУЕМЫЕ ПРИ СВАРКЕ СЕГМЕНТОВ ТРУБЫ В ТРУБОПРОВОДЕ | 2015 |
|
RU2708721C2 |
| СМЕННЫЙ КАРТРИДЖ, СИСТЕМА КАРТРИДЖЕЙ И СПОСОБ ДЛЯ СОЕДИНЕНИЯ КАРТРИДЖЕЙ | 2020 |
|
RU2817599C2 |
| СИСТЕМА И СПОСОБ РАБОТЫ РЕГУЛЯТОРА С ПОНИЖЕННЫМ ЭНЕРГОПОТРЕБЛЕНИЕМ | 2002 |
|
RU2292577C2 |
| БОЛЬШЕГРУЗНАЯ БЕРЕГОВАЯ ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ДЛЯ ПОГРУЗКИ И ВЫГРУЗКИ СПГ | 2020 |
|
RU2791762C1 |
Изобретение может быть использовано в системах передачи и распределения, в частности, природного газа. Интеллектуальный регулятор содержит расположенный в канале потока регулятор давления, с которым связан подвижный элемент привода, процессор и блок связи. В процессор поступают сигналы датчиков давления в канале потока выше и ниже регулятора давления и сигнал датчика положения подвижного элемента привода, по которым процессор вычисляет поток флюида. Блок связи содержит блок приема сигналов от по меньшей мере одного внешнего устройства и блок передачи сигналов, принятых от процессора, во внешние устройства (клапаны, датчик температуры, система нагревателя магистрали, датчик метана). Изобретение обеспечивает регулирование давления в различных точках системы распределения природного газа с одновременным измерением потока. 5 н. и 24 з.п. ф-лы, 2 ил.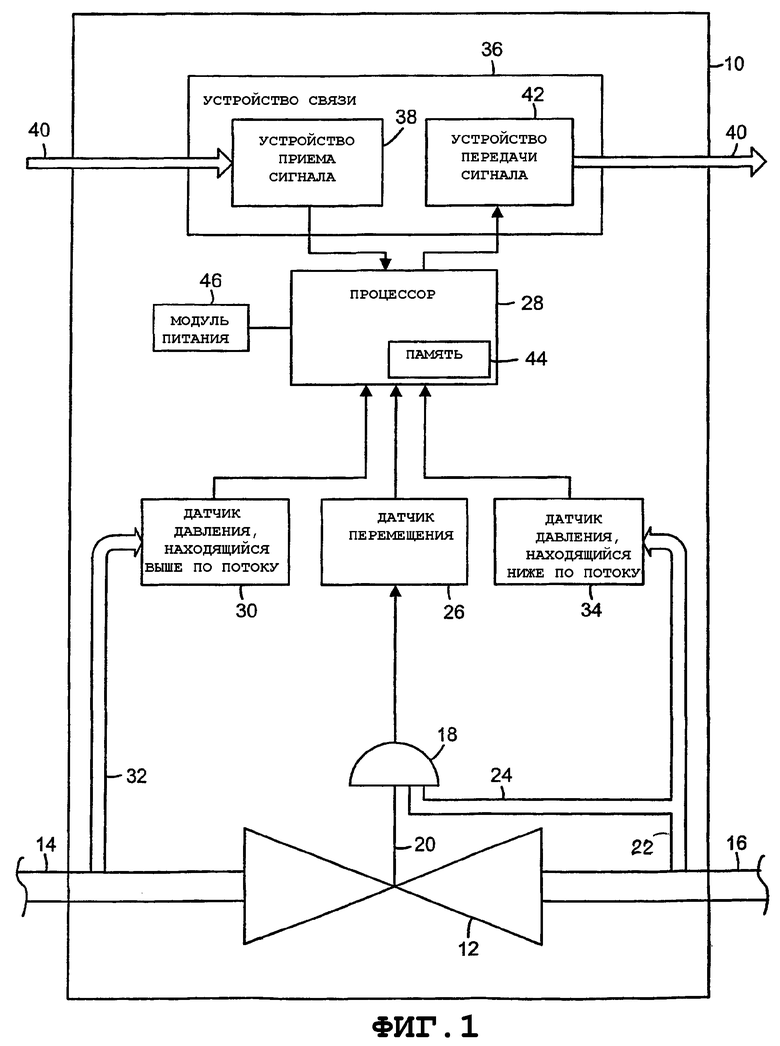
Приоритет по пунктам:
| Приемно-задающее устройство клети трио | 1983 |
|
SU1126348A1 |
| US 5190068 А, 02.03.1993 | |||
| УСТРОЙСТВО УПРАВЛЕНИЯ РАСХОДОМ ТЕКУЧЕЙ СРЕДЫ (ВАРИАНТЫ) | 1990 |
|
RU2079163C1 |
| RU 96120202 А, 27.12.1998 | |||
| СУППОРТ ТОКАРНОГО СТАНКА | 0 |
|
SU335040A1 |

