ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящее изобретение относится к системам управления технологическими процессами и, в частности, к полевым устройствам, таким как регуляторы давления и вспомогательные загрузочные механизмы для регуляторов давления, используемых в системах управления технологическими процессами.
УРОВЕНЬ ТЕХНИКИ
[0002] Системы управления технологическими процессами, такие как распределенные или расширяемые системы управления технологическими процессами, подобные тем, которые используются в химических, нефтеперерабатывающих и других технологических процессах, обычно содержат один или большее количество контроллеров технологического процесса, соединенных с возможностью осуществления связи по меньшей мере с одной главной рабочей станцией или пользовательской рабочей станцией и с одним или большим количеством полевых устройств через аналоговые, цифровые или комбинированные аналоговые/цифровые шины. Полевые устройства, которые могут содержать, например, регулирующие клапаны, позиционеры клапанов, переключатели и передатчики (например, датчики температуры, давления и скорости потока), выполняют такие функции в технологическом процессе, как открытие или закрытие клапанов и измерение параметров технологического процесса. Контроллер технологического процесса принимает сигналы, показывающие измерения технологического процесса, выполненные полевыми устройствами, и/или другую информацию, относящуюся к полевым устройствам, и использует эту информацию, чтобы реализовать управляющую программу для генерации управляющих сигналов, которые отправляют по шинам на полевые устройства для управления работой этого технологического процесса. Информация от каждого из полевых устройств и контроллера обычно доступна для одного или большего количества приложений, выполняемых пользовательской рабочей станцией для обеспечения оператору возможности выполнения любой требуемой функции, относящейся к технологическому процессу, такую как просмотр текущего состояния технологического процесса, изменение работы технологического процесса и т.д. В случае, когда полевое устройство выходит из строя, может быть поставлено под угрозу рабочее состояние всей системы управления технологическим процессом.
[0003] В некоторых случаях полевые устройства на производственном предприятии содержат регуляторы давления. Сами по себе регуляторы давления могут быть использованы для регулировки давления газа, или они в комбинации с пневмоприводами могут быть использованы для приведения в действие клапана. Электронные регуляторы давления могут управляться посредством внешних программируемых логических контроллеров или при помощи внутрисхемного программирования.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0004] Электронный регулятор давления содержит корпус регулятора, имеющий впускное отверстие, соединенное с источником нагнетающего давления, выпускное отверстие для выпуска управляемого давления и выходное отверстие. Впускной клапан соединен на своем входе с нагнетающим давлением, а на своем выходе с выпускным отверстием. Выпускной клапан соединен на своем входе с выпускным отверстием, а на своем выходе с выходным отверстием. Контроллер, расположенный внутри корпуса регулятора, выполнен с возможностью приведения в действие впускного клапана и выпускного клапана с целью регулировки управляемого давления, поданного на выпускное отверстие. Контроллер содержит процессор, запрограммированный на прием и выполнение многоэтапной последовательности команд, включающей в себя условный оператор, вызывающий выполнение процессором первой команды, если условный оператор оценивается как истинный, и второй команды, если условный оператор оценивается как ложный.
[0005] Способ управления электронным регулятором давления содержит принятие процессором, содержащимся внутри корпуса регулятора, через электронное соединение многоэтапной последовательности команд, программирующей процессор на выполнение многоэтапной последовательности команд, и исполнение многоэтапной последовательности команд. Многоэтапная последовательность команд содержит условный оператор, вызывающий выполнение процессором первой команды, если условный оператор оценивается как истинный, и второй команды, если условный оператор оценивается как ложный.
[0006] Реализуемый с помощью компьютера способ программирования электронного регулятора давления содержит принятие выбора множества команд, отбираемых из набора доступных команд. Множество команд выбирают для формирования многоэтапной последовательности команд. Для каждого из множеств выбираемых команд способ содержит принятие по меньшей мере одного значения в пользовательском определении и связывание принятых значений в пользовательском определении с соответствующими выбранными командами. Способ содержит принятие выбора условного оператора в качестве одной из множества команд, принятие выбора параметра и значения параметра для условного оператора и связывание принятого параметра и принятого значения параметра с условным оператором. Способ дополнительно содержит принятие выбора в качестве одной из множества команд первой команды, назначаемой к выполнению, при оценке условного оператора как истинного, и принятие выбора в качестве одной из множества команд второй команды, назначаемой к выполнению, при оценке условного оператора как ложного. Более того, способ содержит программирование электронного регулятора давления на выполнение многоэтапной последовательности команд.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0007] Фиг. 1 представляет собой схематическое изображение системы управления технологическим процессом, которая содержит одно или большее количество интеллектуальных узлов регулятора, выполненных в соответствии с принципами настоящего изобретения.
[0008] Фиг. 2 представляет собой вид сбоку поперечного сечения одного варианта интеллектуального узла регулятора, выполненного в соответствии с принципами настоящего изобретения.
[0009] На фиг. 3 приведен пример скриншота дисплея при выполнении одной или большего количества операций интерфейса с помощью интеллектуального регулятора.
[0010] Фиг. 4 представляет собой детализованный вид части профиля, включая панель компоновщика профиля, для примера скриншота, показанного на фиг. 3.
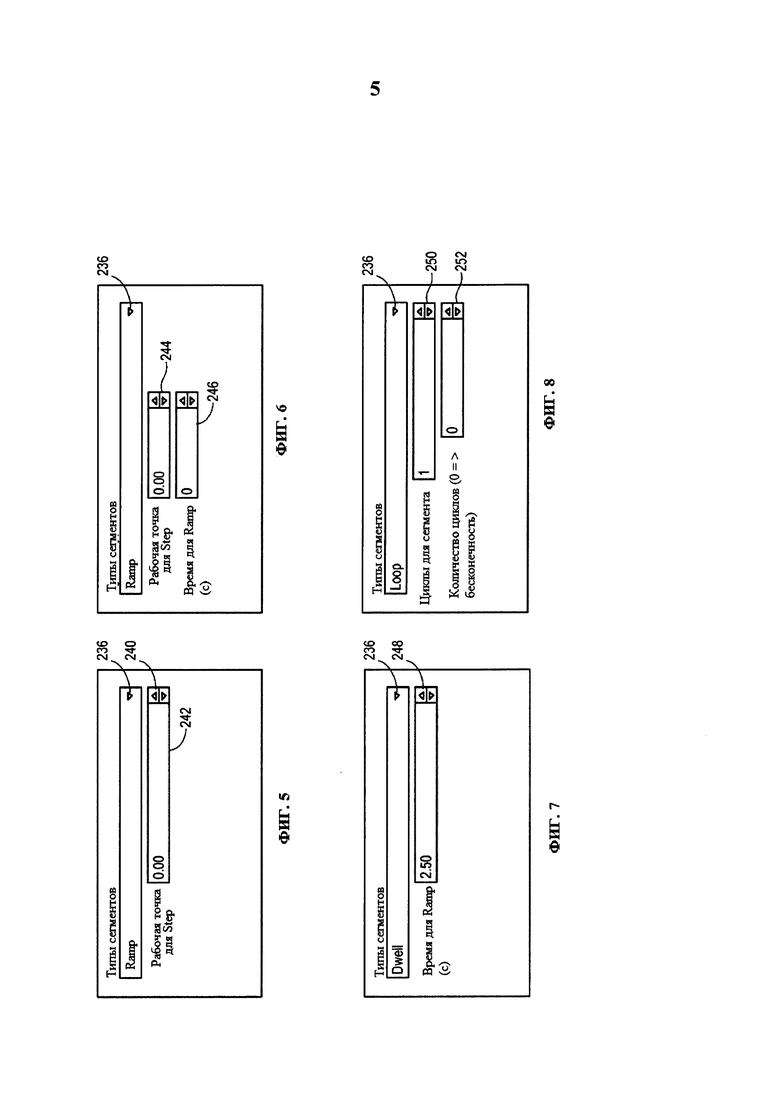
[0011] На фиг. 5 изображен сегмент Step, выбранный в панели компоновщика профиля, показанной на фиг.4.
[0012] На фиг. 6 изображен сегмент Ramp, выбранный в панели компоновщика профиля, показанной на фиг. 4.
[0013] На фиг. 7 изображен сегмент Dwell, выбранный в панели компоновщика профиля, показанной на фиг. 4.
[0014] На фиг. 8 изображен сегмент Loop, выбранный в панели компоновщика профиля, показанной на фиг. 4.
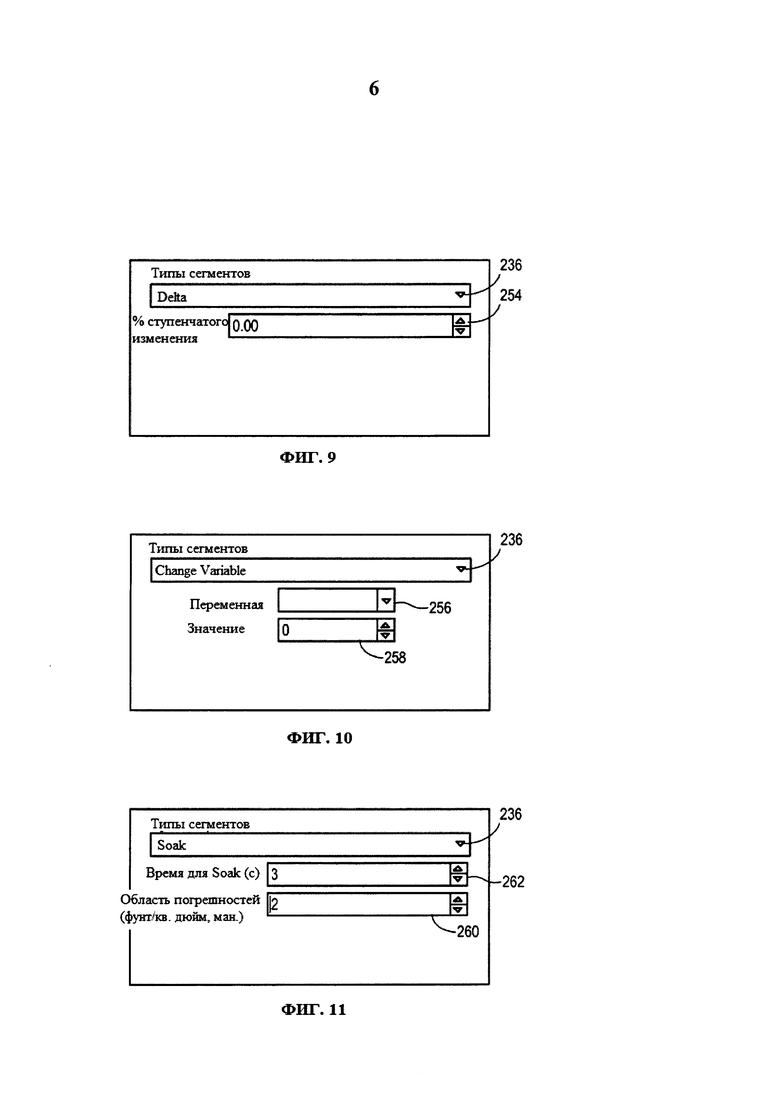
[0015] На фиг. 9 изображен сегмент Delta, выбранный в панели компоновщика профиля, показанной на фиг. 4.
[0016] На фиг. 10 изображен сегмент Change Variable, выбранный в панели компоновщика профиля, показанной на фиг. 4.
[0017] На фиг. 11 изображен сегмент Soak, выбранный в панели компоновщика профиля, показанной на фиг. 4.
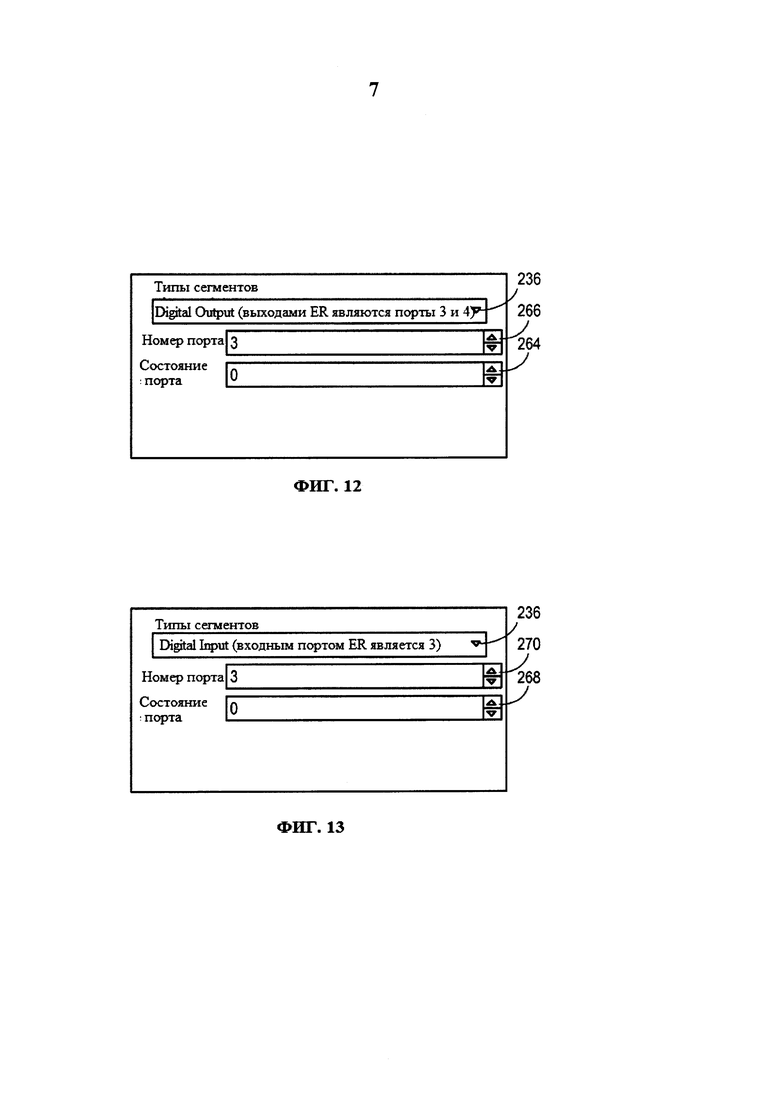
[0018] На фиг. 12 изображен сегмент Digital Output, выбранный в панели компоновщика профиля, показанной на фиг. 4.
[0019] На фиг. 13 изображен сегмент Digital Input, выбранный в панели компоновщика профиля, показанной на фиг. 4.
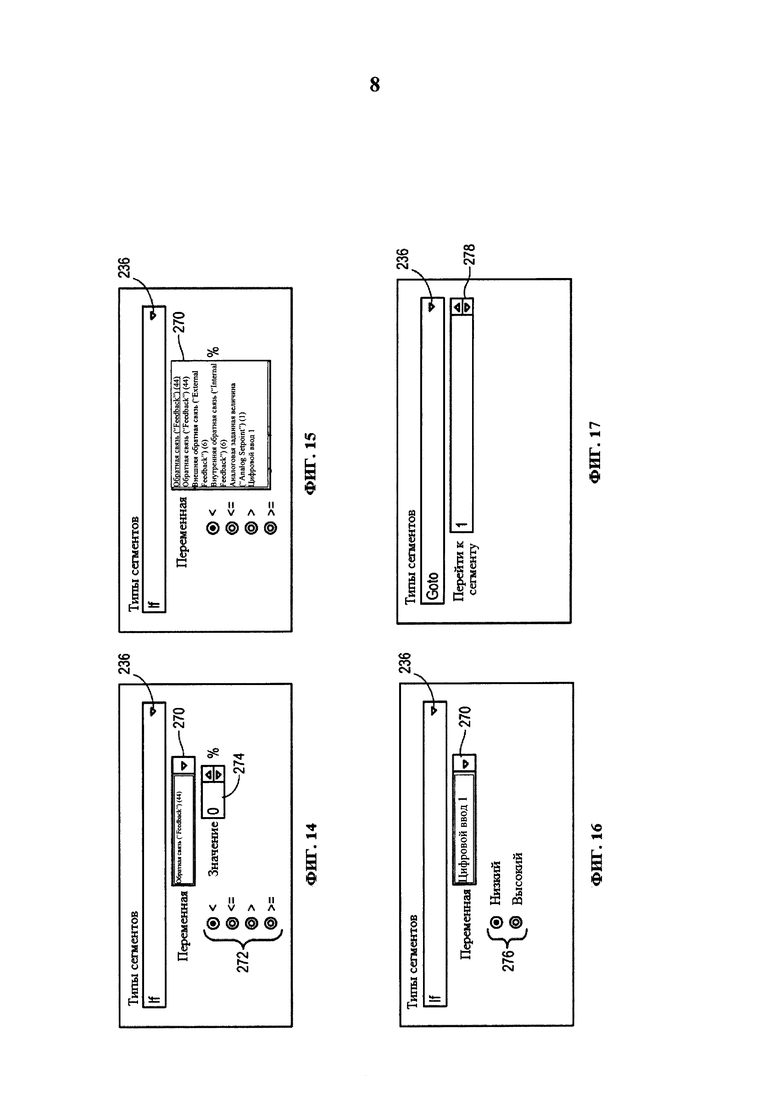
[0020] На фиг. 14-16 изображены примеры, относящиеся к выбору сегмента If в панели компоновщика профиля, показанной на фиг.4.
[0021] На фиг. 17 изображен сегмент Goto, выбранный в панели компоновщика профиля, показанной на фиг. 4.
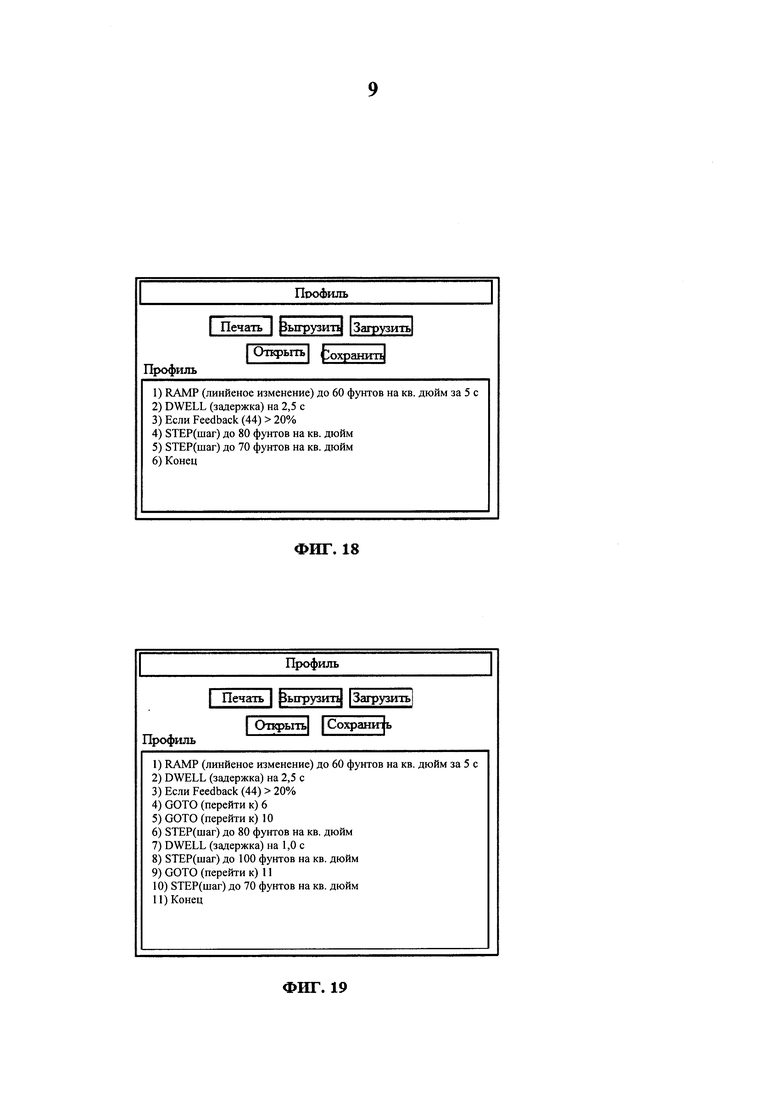
[0022] На фиг. 18 изображен первый пример профиля, построенного с помощью панели компоновщика профиля.
[0023] На фиг. 19 изображен второй пример профиля, построенного с помощью панели компоновщика профиля.
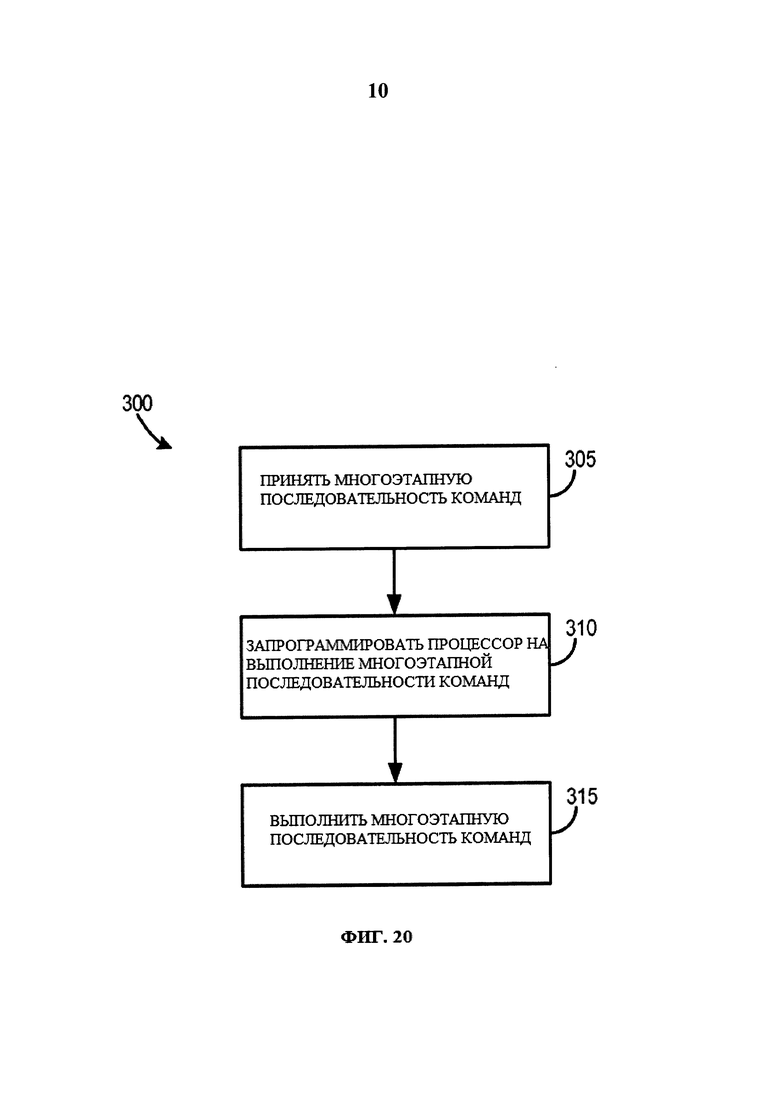
[0024] На фиг. 20 приведена логическая блок-схема, отображающая пример способа управления электронным регулятором давления в соответствии с настоящим изобретением.
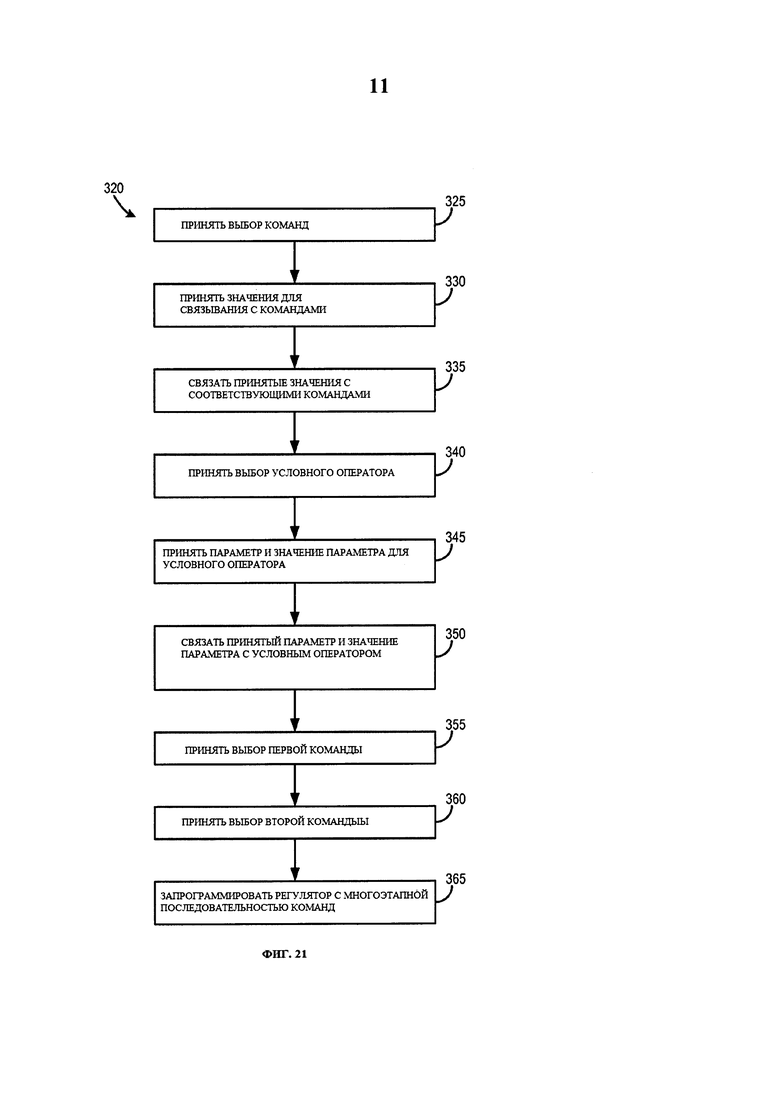
[0025] На фиг. 21 приведена логическая блок-схема, отображающая пример способа программирования электронного регулятора давления в соответствии с настоящим изобретением.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0026] Настоящее изобретение относится к интеллектуальному вспомогательному загрузочному механизму для полевого устройства системы управления технологическими процессами - такого, как регулятор давления (к примеру) - и, в частности, к способам осуществления управления устройством и программирования устройства. В частности, соответствующее раскрываемому здесь изобретению устройство выполнено с возможностью выполнения профиля, созданного пользователем на компьютере, соединенном с устройством. Профиль представляет собой многоэтапную последовательность команд. Профиль включает в себя по меньшей мере один условный оператор и/или по меньшей мере один оператор ветвления. Другими словами, профиль включает в себя по меньшей мере один оператор, который вызывает выполнение устройством первой команды или второй команды в зависимости от того, является ли условный оператор истинным (true) или ложным (false), соответственно. Возможно также наличие в профиле оператора (например, оператора "goto"), вызывающего пропуск устройством одной или большего количества команд в профиле.
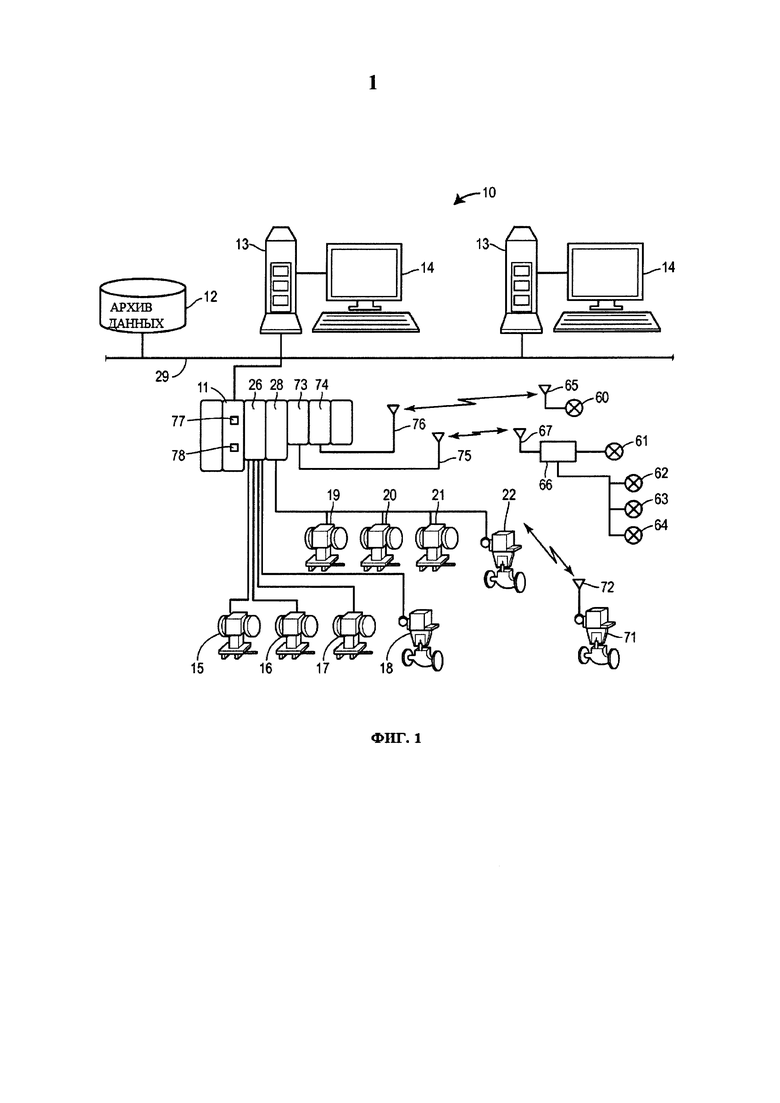
[0027] На фиг.1 показана система 10 управления технологическим процессом, выполненная в соответствии с одним вариантом настоящего изобретения и содержащая одно или большее количество полевых устройств 15, 16, 17, 18, 19, 20, 21, 22 и 71, выполненных с обеспечением связи с контроллером 11 технологического процесса, который, в свою очередь, выполнен с обеспечением связи с архивом 12 данных и с одной или большим количеством пользовательских рабочих станций 13, каждая из которых имеет отображающий экран 14. Сконфигурированный таким образом контроллер 11 передает сигналы полевым устройствам 15, 16, 17, 18, 19, 20, 21, 22 и 71 и рабочим станциям 13 и принимает сигналы от них для управления системой управления технологическим процессом.
[0028] Говоря более подробно, контроллер 11 технологического процесса системы 10 управления технологическим процессом варианта, изображенной на фиг. 1, соединен аппаратно-реализованными соединениями связи с полевыми устройствами 15, 16, 17, 18, 19, 20, 21 и 22 посредством карт 26 и 28 ввода/вывода (I/O). Архивом 12 данных 12 может быть блок сбора данных любого требуемого типа, имеющий любой требуемый тип памяти и любое требуемое или известное программное, аппаратное или программно-аппаратное обеспечение для хранения данных. Кроме того, хотя архив 12 данных показан в виде отдельного устройства на фиг. 1, вместо этого или в дополнение к этому он может быть частью одной из рабочих станций 13 или другого компьютерного устройства, такого как сервер. Контроллер 11, который может быть, например, контроллером DeltaV™, продаваемым компанией Emerson Process Management, соединен с возможностью осуществления связи с рабочими станциями 13 и архивом 12 данных через сеть 29 связи, которая может быть, например, соединением Ethernet.
[0029] Как уже упоминалось, контроллер 11 соединен с возможностью осуществления связи с полевыми устройствами 15, 16, 17, 18, 19, 20, 21 и 22 с использованием схемы аппаратно-реализованной связи, которая может включать использование любого требуемого аппаратного, программного и/или программно-аппаратного обеспечения для реализации аппаратно-реализованной связи, включая, например, стандартную 4-20 мА связь и/или любую связь с любым интеллектуальным протоколом связи, таким как протокол связи FOUNDATION® Fieldbus, протокол связи HART® и т.д. Полевые устройства 15, 16, 17, 18, 19, 20, 21 и 22 могут быть любыми типами устройств, такими как датчики, регуляторы давления, узлы регулирующих клапанов, передатчики, позиционеры и т.д., в то время как карты 26 и 28 ввода/вывода могут быть любыми типами устройств ввода/вывода, которые соответствуют любому требуемому протоколу связи или контроллера. В соответствии с вариантом осуществления изобретения, показанном на фиг. 1, полевые устройства 15, 16, 17, 18 являются стандартными 4-20 мА устройствами, которые осуществляют связь по аналоговым линиям с картой 26 ввода/вывода, в то время как цифровые полевые устройства 19, 20, 21, 22 могут быть интеллектуальными устройствами, такими как устройства связи HART® и полевые устройства Fieldbus, которые осуществляют связь по цифровой шине с картой 28 ввода/вывода с использованием протокола связи Fieldbus. Разумеется, полевые устройства 15, 16, 17, 18, 19, 20, 21 и 22 могут соответствовать любому другому требуемому стандарту (стандартам) или протоколам, включая любые стандарты или протоколы, которые будут разработаны в будущем.
[0030] Кроме того, система 10 управления технологическим процессом, показанная на фиг. 1, содержит несколько беспроводных полевых устройств 60, 61, 62, 63, 64 и 71, расположенных на предприятии, подлежащим управлению. Полевые устройства 60, 61, 62, 63, 64 показаны, как передатчики (например, датчики переменных технологического процесса), в то время как полевое устройство 71 показано, как узел регулирующего клапана, содержащий, например, регулирующий клапан и привод. Между контроллером 11 и полевыми устройствами 60, 61, 62, 63, 64 и 71 может быть установлена беспроводная связь с использованием любого требуемого оборудования беспроводной связи, в том числе аппаратное, программное, программно-аппаратное обеспечение или любую их комбинацию, которая известна в настоящем или которая будет разработана позже. В варианте, показанном на фиг. 1, антенна 65 соединена с передатчиком 60 и предназначена для осуществления беспроводной связи для него, в то время как беспроводной маршрутизатор или другой модуль 66, имеющий антенну 67, соединен с передатчиками 61, 62, 63 и 64 для осуществления беспроводной связи для всех них. Аналогично, антенна 72 соединена с узлом 71 регулирующего клапана для осуществления беспроводной связи для узла 71 регулирующего клапана. Полевые устройства или связанное аппаратное обеспечение 60, 61, 62, 63, 64, 66 и 71 могут реализовывать операции стека протоколов, которые используются соответствующим протоколом беспроводной связи, чтобы принимать, декодировать, маршрутизировать, кодировать и передавать беспроводные сигналы через антенны 65, 67 и 72 для осуществления беспроводной связи между контроллером 11 технологического процесса и передатчиками 60, 61, 62, 63, 64 и узлом 71 регулирующего клапана.
[0031] При необходимости передатчики 60, 61, 62, 63, 64 могут составлять единственную связь между различными датчиками технологического процесса (передатчиками) и контроллером 11 технологического процесса и, как таковые, предполагают отправку точных сигналов на контроллер 11, чтобы гарантировать протекание процесса без нарушений. Следовательно, передатчики 60, 61, 62, 63, 64, часто называемые передатчиками переменных процесса (PVT, process variable transmitter), могут играть важную роль в управлении всем процессом управления. Кроме того, узел 71 регулирующего клапана может обеспечивать измерения, выполненные с помощью датчиков в узле 71 регулирующего клапана, или может обеспечивать другие данные, сгенерированные или вычисленные посредством узла 71 регулирующего клапана, для контроллера 11, как часть своей работы. Конечно, как известно, узел 71 регулирующего клапана также может принимать управляющие сигналы от контроллера 11для воздействия на физические параметры, например, на поток, внутри всего процесса.
[0032] Контроллер 11 технологического процесса соединен с одним или большим количеством устройств 73 и 74 ввода/вывода, каждое из которых соединено с соответствующей антенной 75 и 76, и эти устройства ввода/вывода и антенны 73, 74, 75, 76 действуют как передатчики/приемники для осуществления беспроводной связи с беспроводными полевыми устройствами 61, 62, 63, 64 и 71 через одну или большее количество сетей беспроводной связи. Беспроводная связь между полевыми устройствами (например, передатчиками 60, 61, 62, 63, 64 и узлом 71 регулирующего клапана) может осуществляться с использованием одного или большего количества известных протоколов беспроводной связи, таких как протокол WirelessHART®, протокол Ember, протокол Wi-Fi, стандарт беспроводной связи IEEE и т.д. Более того, устройства 73 и 74 ввода/вывода могут реализовывать операции стека протоколов, используемых этими протоколами связи для приема, декодирования, маршрутизации, кодирования и передачи беспроводных сигналов через антенны 75 и 76, чтобы осуществлять беспроводную связь между контроллером 11 и передатчиками 60, 61, 62, 63, 64 и узлом 71 регулирующего клапана.
[0033] Как показано на фиг. 1, контроллер 11 обычно содержит процессор 77, который реализует или отслеживает одну или большее количество программ управления технологическим процессом (или любой модуль, блок или их подпрограмму), хранящиеся в запоминающем устройстве 78. Программы управления технологическим процессом, хранящиеся в запоминающем устройстве 78, могут содержать контуры управления, которые реализованы в этом производственном предприятии, или быть связаны с ними. Вообще говоря и как известно, контроллер 11 технологического процесса выполняет одну или больше количество управляющих программ и осуществляет связь с полевыми устройствами 15, 16, 17, 18, 19, 20, 21, 22, 60, 61, 62, 63, 64 и 71, пользовательскими рабочими станциями 13 и архивом 12 данных для управления технологическим процессом любым требуемым способом (способами). Кроме того, любое одно из полевых устройств 18, 22 и 71, показанных на фиг. 1, каждое из которых изображено, как узел регулирующего клапана, может содержать привод интеллектуального регулирующего клапана, выполненный в соответствии с принципами настоящего изобретения, для осуществления связи с контроллером процесса 11 для облегчения отслеживания исправности и целостности привода.
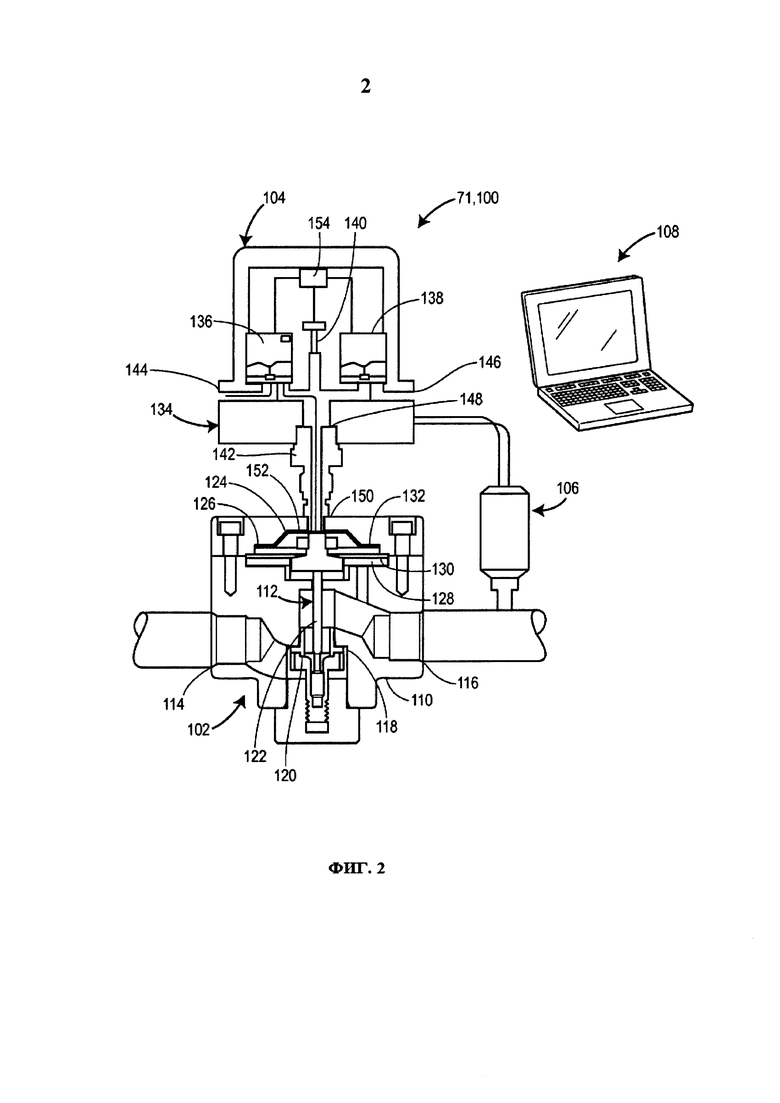
[0034] На фиг. 2 полевое устройство 71, изображенное на фиг. 1, показано как узел 100 интеллектуального регулятора, выполненный в соответствии с принципами настоящего изобретения. На фиг. 2 узел 100 интеллектуального регулятора содержит регулятор 102, вспомогательное устройство 104 и датчик давления 106 с обратной связью. Кроме того, на фиг. 2 изображено необязательное персональное вычислительное устройство 108, соединенное с возможностью осуществления связи с вспомогательным устройством 104 для обеспечения пользователю возможности взаимодействия с вспомогательным устройством 104, как будет описано ниже.
[0035] Регулятор 102 содержит корпус 110 клапана 110 и управляющий узел 112. Корпус 110 клапана задает впуск 114, выпуск 116 и галерею 118, задающую посадочную поверхность 120. Управляющий узел 112 выполнен в корпусе 110 клапана и содержит управляющий элемент 122, функционально соединенный с узлом 124 диафрагмы. Управляющий элемент 122 выполнен с возможностью перемещения между закрытым положением в герметичном взаимодействии с посадочной поверхностью 120 и открытым положением на расстоянии от посадочной поверхности 120 в ответ на изменения давления на узле 124 диафрагмы. Как показано, узел 124 диафрагмы содержит диафрагму 126, расположенную внутри полости 128 диафрагмы корпуса 110 клапана регулятора 102. Нижняя поверхность 130 диафрагмы 126 сообщается по текучей среде с выпуском 116 корпуса 110 клапана, а верхняя поверхность 132 диафрагмы 126 сообщается по текучей среде с вспомогательным устройством 104 через вспомогательное отверстие 150 в корпусе 110 клапана.
[0036] Вспомогательное устройство 104 содержит корпус 134 клапана, впускной клапан 136, выхлопной клапан 138, датчик 140 давления и выпускной переходник 142. Корпус 134 клапана задает впускное отверстие 144, выходное отверстие 146 и выпускное отверстие 148. Впускное отверстие 144 выполнено с возможностью соединения с источником подачи газа для загрузки колпака 152 регулятора 102, как будет описано ниже. Как показано, впускной клапан 136 расположен рядом с впускным отверстием 144, выхлопной клапан 138 расположен рядом с выходным отверстием 146, а выпускной переходник 142 проходит от выпускного отверстия 148 до вспомогательного отверстия 150 в корпусе 110 клапана. Таким образом, выпускной переходник 142 обеспечивает сообщение по текучей среде между вспомогательным устройством 104 и регулятором 102. Датчик 140 давления 134 расположен в корпусе клапана вспомогательного устройства 140 на месте между впускным и выпускным клапанами 136, 138. Таким образом, датчик давления 104 выполнен с возможностью восприятия давления между впускным и выпускным клапанами 136, 138, а также в выпускном отверстии 148, выпускном переходнике 142 и в полости 128 диафрагмы, примыкающей к верхней поверхности 132 диафрагмы 126. Эта часть полости 128 диафрагмы может упоминаться как колпак 152 регулятора 102. В соответствии с одним вариантом вспомогательного устройства 104, впускной и выхлопной клапаны 136, 138 могут представлять собой электромагнитные клапаны, такие как электромагнитные клапаны с широтно-импульсной модуляцией (ШИМ), а датчик давления 140 может представлять собой преобразователь давления. Кроме того, впускной и выхлопной клапаны 136, 138 и датчик 140 давления могут быть соединены с возможностью осуществления связи со встроенным контроллером 154, который может хранить логику и/или направлять часть или все функциональные возможности вспомогательного устройства 104, как будет описано ниже.
[0037] Продолжаем ссылаться на фиг .2, датчик 106 давления с обратной связью узла 100 содержит преобразователь давления, выполненный с возможностью обнаружения давления на выпуске 116 регулятора 102 и передачи сигналов на вспомогательное устройство 104 и, в частности, на встроенный контроллер 154 вспомогательного устройства 104. На основании сигналов, принимаемых встроенным контроллером 154 от датчика 106 давления с обратной связью, вспомогательное устройство 104 открывает и/или закрывает впускной и выхлопной клапаны 136, 138 для управления давлением в колпаке 152 регулятора 102, который, в свою очередь, управляет положением управляющего элемента 122 и, в конечном итоге, давлением на выпуске 116 регулятора 102.
[0038] В особенности, при эксплуатации в нормальных условиях, давлением на выпуске 116 регулятора 102 управляют и поддерживают, как требуется, посредством регулировки давления в колпаке 152 регулятора 102. Это достигается посредством работы вспомогательного устройства 104 и датчика 106 давления с обратной связью. Например, в соответствии с одним вариантом изобретения датчик 106 давления с обратной связью обнаруживает давление на выпуске 116 каждые 25 миллисекунд и передает сигнал на встроенный контроллер 154 вспомогательного устройства 104. Встроенный контроллер 154 сравнивает этот сигнал, указывающий на давление на выпуске 116, с требуемым заданным значением давления и определяет, является ли давление на выпуске меньшим, равным или большим, чем заданное значение давления. На основе этого определения вспомогательное устройство 104 управляет одним или обоими впускным и выхлопным клапанами 136, 138 для регулировки давления в колпаке 152. Другими словами, если обнаруженное выпускное давление ниже требуемого заданного значения давления, то встроенный контроллер 154 приводит в действие впускной клапан 136 (например, дает впускному клапану 136 команду на открытие, а выхлопному клапану 138 дает команду на закрытие). В этой конфигурации газ входит во впускное отверстие 144 вспомогательного устройства 104 и увеличивает давление в колпаке 152, в результате чего узел 124 диафрагмы поджимает управляющий элемент 122 вниз относительно ориентации на фиг. 2, что открывает регулятор 102 и увеличивает поток и, в конце концов, давление на выпуске 116. Напротив, если определяют, что давление, обнаруженное на выпуске 116 с помощью датчика 106 давления с обратной связью, будет выше требуемого заданного значения давления, то встроенный контроллер 154 приводит в действие выхлопной клапан 138 (например, даст команду выхлопному клапану 138 на открытие, а впускному клапану 136 даст команду на закрытие). В этой конфигурации газ в колпаке 152 выпускается через выходное отверстие 146 вспомогательного устройства 104 для снижения давление на верхней поверхности 132 диафрагмы 126. Это позволяет выпускному давлению поджимать узел 124 диафрагмы и управляющий элемент 122 вверх относительно ориентации на фиг. 2, что закрывает регулятор 102 и уменьшает поток и, в конце концов, давление на выпуске 116.
[0039] На основании приведенного выше описания следует понимать, что вспомогательное устройство 104 и датчик 106 давления с обратной связью работают в комбинации друг с другом для периодического, но частого отслеживания давления на выпуске 116 регулятора 102 и регулировки давления в колпаке 152 до тех пор, пока давление на выпуске 116 не станет равным заданному значению давления.
[0040] В соответствии с вариантами осуществления изобретения персональное вычислительное устройство 108, описанное со ссылкой на фиг.2, содержит одну или большее количество программ, внедренных в машиночитаемые инструкции, хранящиеся на запоминающем устройстве (например, энергонезависимых или энергозависимых запоминающих устройствах, таких как флэш-память, ОЗУ, магнитный носитель и т.д.) или другой некратковременный машиночитаемый носитель (например, оптические диски и т.д.). Указанные одна или большее количество программ могут облегчать пользователю персонального вычислительного устройства 108 взаимодействие с интеллектуальным регулятором 100. Персональное вычислительное устройство 108 (взаимозаменяемым образом называемое компьютером) может быть соединено с возможностью осуществления связи с интеллектуальным регулятором 100 любым известным способом, включая в качестве примера универсальную последовательную шину (USB), RS-232, RS-485, WiFi, Bluetooth или любое другое подходящее соединение связи. В соответствии с некоторыми вариантами осуществления изобретения соединение между компьютером 108 и регулятором 100 является временным. Например, компьютер 108 соединяют с регулятором 100 для программирования регулятора 100, выгрузки информации от регулятора 100, загрузки информации на регулятор 100, выполнения диагностики на регуляторе 100 и т.д. В соответствии с другими вариантами осуществления изобретения соединение между компьютером 108 и регулятором является постоянным или полупостоянным. Например, регулятор может быть связан с рабочей станцией 14 через контроллер 11.
[0041] Компьютер 108 и, в частности, процессор компьютера 108 может выполнять указанные одну или большее количество программ для побуждения процессора выполнять действия, относящиеся к конфигурации, управлению, техническому обслуживанию, диагностике и/или работе регулятора 100. Например, одна из указанных программ может выполнять процедуру автоматической настройки регулятора 100. Одна из указанных программ может облегчать ручную настройку регулятора 100. Программа может побуждать процессор отображать отклик регулятора на один или большее количество входных сигналов и, в соответствии с вариантами осуществления изобретения, отображенный отклик может быть графическим по характеру (например, может быть графическим экраном). Программа может обеспечивать пользователю возможность программирования заданного значения регулятора 100. Стандартные программы могут предоставлять пользователю возможность корректировки пропорциональной, дифференциальной и/или интегральной постоянных и/или интегральных пределов и/или параметров мертвой зоны. Стандартные программы могут обеспечивать пользователю возможность побуждения регулятора 100 получать и хранить данные, а также возможность извлечения пользователем сохраненных данных из регулятора 100. Еще одна программа может обеспечивать пользователю возможность установки пусковых событий для сбора данных в определенных обстоятельствах (например, когда отдельное давление, ошибка или входной сигнал достигают порогового значения). Другие стандартные программы могут обеспечивать пользователю возможность установки управляющих режимов, выполнения калибровки, установки управляющих пределов, установки значений защиты диафрагмы, запуска диагностических процедур (например, испытание на герметичность соленоида) и тому подобное. Кроме того, одна или большее количество программ может облегчать использование профилей на регуляторе 100.
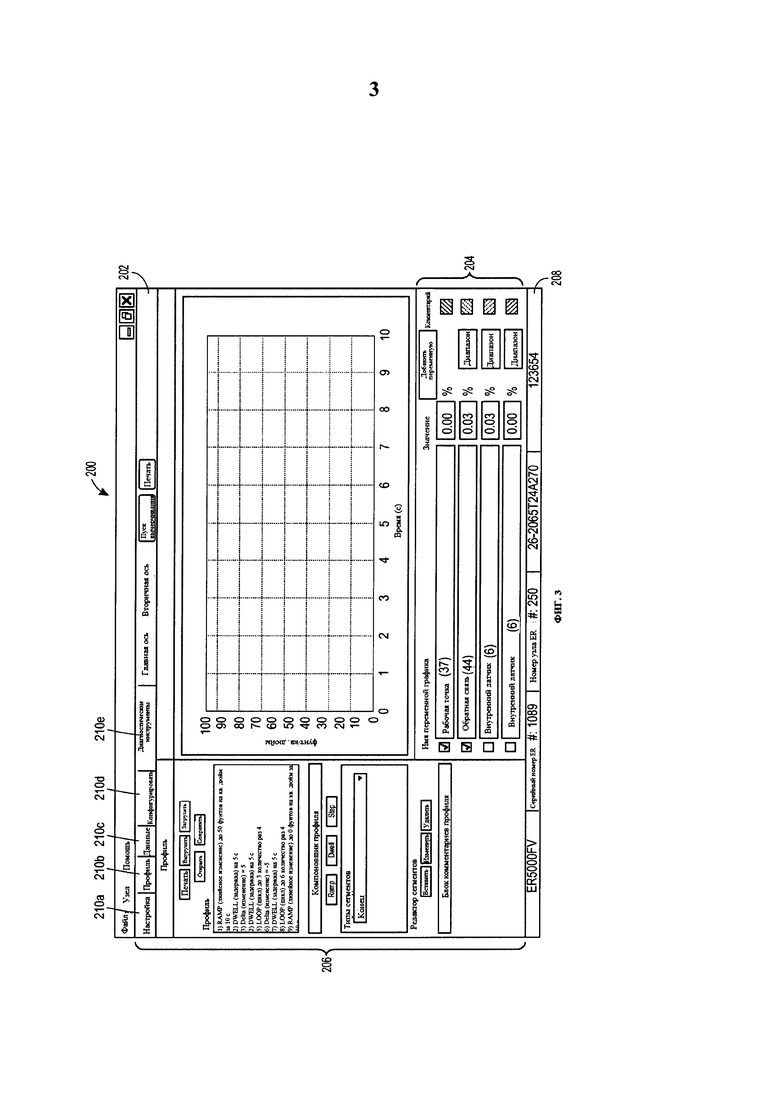
[0042] На фиг. 3 в виде примера изображения 200 представлен экран, сгенерированный при помощи указанных одной или большего количества программ, работающих на компьютере 108. Изображение 200 содержит графический экран 202, набор управляющих элементов 204 переменных графического экрана, область 206 функциональной вкладки и область 208 нижнего колонтитула. Графический экран 202 предоставляет пользователю чередующееся по моментам точное визуальное отображение взаимодействия между настройками заданных значений регулятора 100 и откликом регулятора 100 на заданное значение. В то же время, управляющие элементы 204 переменных графического экрана облегчают выбор и управление переменными, отображаемыми на графическом экране 202. Управляющие элементы 204 переменных графического экрана могут обеспечивать пользователю возможность выбора входных источников для регулятора 100, которые этот пользователь желает прослеживать и/или вычерчивать. В экране 200 управляющие элементы 204 переменных графического экрана указывают, что данные, относящиеся к заданному значению и к обратной связи, вычерчиваются по умолчанию, и позволяют пользователю выбирать отслеживание до двух дополнительных переменных.
[0043] Область 206 функциональной вкладки облегчает реализацию взаимодействия с различными программами, описанными выше. Например, активация вкладки 210а (т.е. перенос на передний план информации на вкладке 210а) отобразит управляющие элементы, относящиеся к настройке параметров регулятора 100; активация вкладки 210b (как изображено в экране 200 на фиг. 3) отобразит управляющие элементы, относящиеся к использованию профилей с регулятором 100; активация вкладки 210с отобразит управляющие элементы, относящиеся к прослеживанию, записи, выгрузке и выполнению других действий, относящихся к данным регулятора 100; активация вкладки 210d отобразит управляющие элементы, относящиеся к конфигурированию регулятора 100; и активация вкладки 210e отобразит управляющие элементы, относящиеся к выполнению диагностических программ на регуляторе 100.
[0044] В области 208 нижнего колонтитула отображается информацию о регуляторе 100, который связан в режиме коммуникационного обмена с компьютером 108 и на котором в настоящее время работают указанные программы. Информация в области 208 нижнего колонтитула может содержать, например, данные о модели, данные о серийном номере, данные об адресе узла, данные о номере детали, о блоке в состоянии текущего коммуникационного обмена с программами (например, при соединении множества регуляторов по типу гирляндной цепи) и т.п.
[0045] Как описано выше, в состав работающих на компьютере 108 стандартных программ может входить программа, облегчающая использование профилей на регуляторе 100. Профиль представляет собой многоэтапную последовательность команд, которая может быть сохранена и/или выполнена посредством встроенного контроллера 154 регулятора 100. В различных вариантах осуществления изобретения встроенный контроллер 154 содержит универсальный процессор, выполненный с возможностью выполнения машиночитаемых инструкций, хранящихся в запоминающем устройстве встроенного контроллера 154. В соответствии с другими вариантами осуществления изобретения контроллер 154 содержит программируемое логическое устройство, такое как FPGA (Field Programmable Gate Array, программируемая вентильная матрица), DSP (Digital Signal Processor, цифровой сигнальный процессор), ASIC (Application Specific Integrated Circuit, специализированная интегральная микросхема) или тому подобное. В любом случае, профиль позволяет регулятору 100 осуществлять саморегулировку в таких ситуациях, как операции пуска/останова, изменения заданных значений и др. Профили могут быть такими простыми, как одна команда, или такими сложными, как сотни команд.
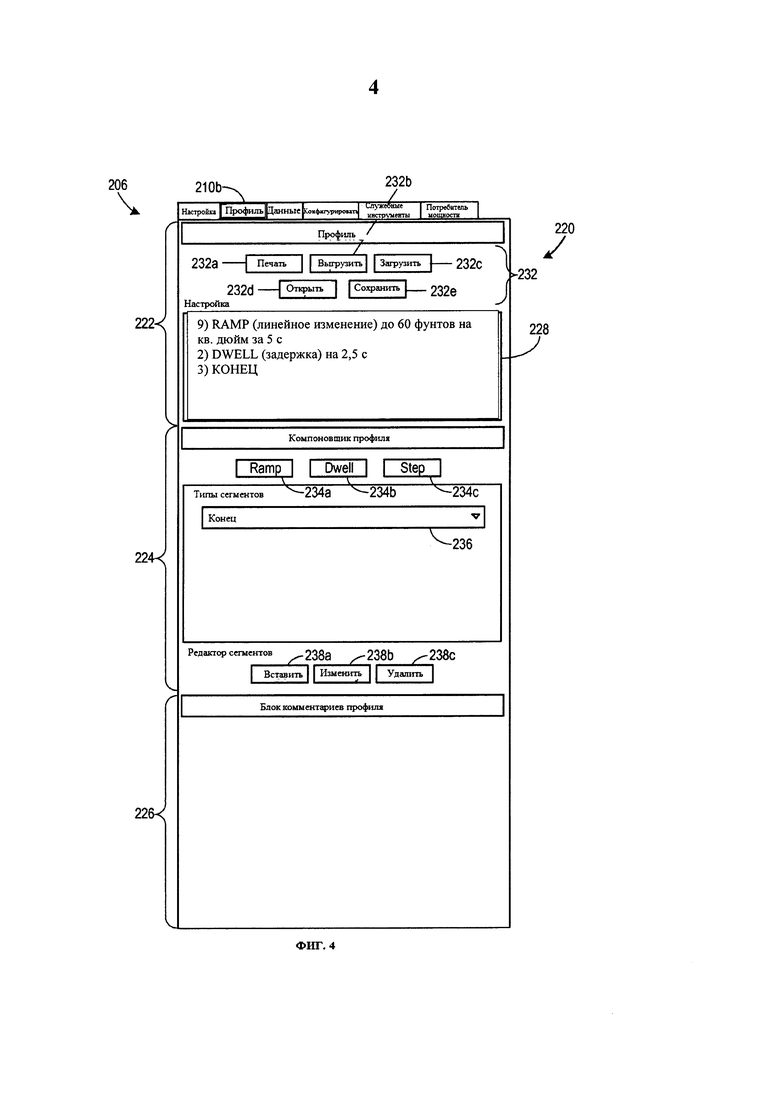
[0046] На фиг. 4 представлено детализованное изображение 220 области 206 функциональной вкладки с выбранной вкладкой 210b профиля. Профиль 210b вкладки содержит три панели: панель 222 профиля, панель 224 компоновщика профиля и панель 226 блока комментариев к профилю. Панель 222 профиля отображает профиль, загруженный на текущий момент, в окне 228 профиля. Когда загружается профиль - при выборке из памяти в компьютере 108 или из памяти в регуляторе 100 - в окне 228 профиля отображается последовательность команд 230, связанная с профилем. В вариантах реализации изобретения каждую команду в многоэтапной последовательности нумеруют или идентифицируют другим способом.
[0047] Панель 222 профиля в вариантах реализации изобретения содержит элементы управления 232 для выполнения различных действий, относящихся к профилю. В изображении 220 на фиг. 4 панель 222 профиля содержит элемент 232а управления распечаткой, принуждающий процессор к выводу на подсоединенный принтер (не показан) содержимого окна 228 профиля (т.е., к распечатке последовательности команд 230). Панель профиля содержит также элемент 232b управления выгрузкой и элемент 232 с управления загрузкой, принуждающие процессор компьютера 108 к пересылке профиля из встроенного контроллера 154 в окно 228 профиля или к пересылке содержимого окна 228 профиля во встроенный контроллер 154, соответственно. Элемент 232d управления открыванием и элемент 232е управления сохранением принуждают процессор компьютера к открыванию (т.е., к выборке из запоминающего устройства) предварительно сохраненного профиля (и к отображению профиля в окне 228 профиля) или к записи на сохранение содержимого окна 228 профиля в запоминающее устройство, соответственно.
[0048] На фиг. 4 показана также панель 226 блока комментариев к профилю, позволяющая оператору вводить комментарии к открытому профилю. Комментарии могут быть полезны другим пользователям (или самому пользователю панели) для последующих обращений и содержать описания функции профиля, вариантов использования для профиля и др.
[0049] Панель 224 компоновщика профиля облегчает создание и/или редактирование профилей, по одной команде в единицу времени. В вариантах реализации изобретения каждая команда именуется сегментом и обозначается номером строки или другим аналогичным маркером. Многообразие типов сегментов способно облегчить создание профиля, выполняющего ряд различных действий. Панель 224 компоновщика профиля, показанная на виде 220, содержит три элемента 234 управления с быстрым доступом и элемент 236 управления выбором сегмента. Каждый элементу 234 с быстрым доступом может быть соотнесен с типом сегмента профиля общего пользования и в вариантах реализации изобретения может служить для автоматического выбора требуемого сегмента соответствующего типа в элементе 236 управления выбором сегмента. Например, элементы 234 управления с быстрым доступом включают в себя элемент 234а управления линейным изменением (Ramp), элемент 234b управления выдержкой времени (Dwell) и элемент 234 с управления шаговым приращением (Step). Путем активизации элемента 234а управления линейным изменением (Ramp) можно настроить элемент 236 управления выбором сегмента на сегмент Ramp, позволяющий пользователю вводить значение рабочей точки и длительность линейного изменения, как описано ниже. Аналогично, путем активизации элемента 234b управления выдержкой времени (Dwell) можно настроить элемент 236 управления выбором сегмента на Dwell, а путем активизации элемента 234 с управления шаговым приращением (Step) можно настроить элемент 234 управления выбором сегмента на сегмент Step. Как будет описано ниже, выбор типа сегмента в элементе 236 управления выбором сегмента вызывает отображение любых параметров, которые необходимо вводить для выбранного типа сегмента.
[0050] Панель 224 компоновщика профиля содержит также элементы 238 управления редактором сегмента. Элементы 238. управления редактором сегмента вызывают добавление, изменение или удаление выбранного сегмента. Например, пользователь может выбрать команду в последовательности команд 230 и далее выбрать тип сегмента с помощью элемента 236 управления выбором сегмента. После ввода любых параметров, связанных с выбранным типом сегмента, пользователь может активизировать элемент 238а управления вставкой, вызывая добавление выбранного сегмента и соответствующих параметров к последовательности команд 230 на позицию перед выбранной командой (или позади нее в зависимости от варианта реализации). Аналогично, выбор команды в последовательности команд, изменение значений параметров, связанных с выбранной командой, и последующая активизация элемента 238b управления изменением вызывает модификацию команды в последовательности команд 230. Наконец, выбор команды в последовательности команд и активизация элемента 238 с управления удалением вызывает удаление выбранной команды из последовательности команд.
[0051] На фиг. 5-17 приведены примеры типов сегментов, которые можно выбирать в панели 24 компоновщика профиля. Хотя различные параметры описываются в привязке к каждому из типов сегментов, приводимые ниже примеры не подразумевают никаких ограничений. В различных вариантах реализации можно включать в рассмотрение типы сегментов, отличающиеся от рассматриваемых ниже типов, увеличенное или уменьшенное количество типов сегментов и различающиеся между собой по значениям и/или по количеству (в сторону увеличения или уменьшения) параметры, связанные с каждым из типов сегментов. На фиг. 5 в качестве примера изображается выбор сегмента типа Step (шаг) с помощью элемента 236 управления выбором сегмента. Тип сегмента Step можно выбирать с помощью элемента управления 236 или по-иному путем активизации элемента управления 234с. В любом случае выбор типа сегмента Step принуждает панель 234 компоновщика профиля открывать на дисплее поле 240 ввода значений параметров. Поле 240 ввода значений параметров принимает вводимое значение рабочей точки, до которого будет доведен регулятор 100 посредством функции шагового изменения во время выполнения команды встроенным контроллером 240. Поле ввода 240 может представлять собой поле ручного ввода текстов, поле с выпадающим списком, может содержать кнопки 242 инкрементного увеличения/уменьшения значений и др. Возможно использование поля ввода любого подходящего типа.
[0052] Фиг. 6 иллюстрирует выбор типа сегмента Ramp (сегмента линейного изменения) в элементе 236 управления выбором сегмента. Тип сегмента Ramp можно выбирать с помощью элемента управления 236 или по-иному путем активизации элемента управления 234а. В любом случае выбор типа сегмента Ramp принуждает панель 234 компоновщика профиля открывать на дисплее поля 244 и 246 для ввода значений параметров. Поле 244 принимает вводимое значение рабочей точки, до которого будет доведен регулятор 100 в соответствии с линейно изменяющейся функцией во время выполнения команды встроенным контроллером 154. Поле 246 принимает вводимое значение промежутка времени, в течение которого будет происходить линейное нарастание (или линейное убывание) до нового значения рабочей точки, указанного в поле 244.
[0053] Фиг. 7 иллюстрирует выбор типа сегмента Dwell (сегмента задержки) в элементе 236 управления выбором сегмента. Тип сегмента Dwell можно выбирать с помощью элемента управления 236 или по-иному путем активизации элемента управления 234b. В любом случае выбор типа сегмента Dwell принуждает панель 234 компоновщика профиля открывать на дисплее поле 248 ввода значений параметров, принимающее значение длительности выдержки времени (т.е., промежутка времени, в течение которого встроенный процессор удерживает текущее значение рабочей точки).
[0054] Тип сегмента Loop (сегмента цикла) выбирают в элементе 236 управления выбором сегмента, как показано на фиг. 8. Выбор типа сегмента Loop принуждает панель 234 компоновщика профиля открыть на дисплее окна 250 и 252 для ввода значений. Тип сегмента Loop вызывает множество циклов выполнения последовательности командных сегментов встроенным процессором 154 в регуляторе 100. В рассматриваемом примере поле 250 ввода значений параметров принимает значение для сегмента на момент запуска цикла, а поле 250 ввода значений параметров принимает обозначение количества раз выполнения цикла. В вариантах реализации в поле 250 может быть, напротив, обозначен конечный сегмент для цикла.
[0055] Фиг. 9 иллюстрирует выбор типа сегмента Delta (сегмента изменения) в элементе 236 управления выбором сегмента. Тип сегмента Delta принуждает встроенный процессор 154 регулятора 100 инициировать ступенчатое изменение значения рабочей точки на величину в процентах, вводимую в поле 254 ввода значений параметров. Например, ввод значения 50% в поле 254 ввода значений параметров вызвал бы (сразу после выполнения сегмента встроенным контроллером 154 регулятора 100) ступенчатое снижение значения рабочей точки до 50% от текущего значения рабочей точки (например, ступенчатое снижение со 100 фунт/кв. дюйм до 50 фунт/кв. дюйм (с 7,031 кг силы/кв.см до 4,218 кг силы/кв.см)).
[0056] Фиг. 10 иллюстрирует выбор типа сегмента Change Variable (изменение переменной) в элементе 236 управления выбором сегмента. Тип сегмента Change variable вызывает изменение внутренней переменной регулятора 100 до указанного значения. Поле 256 ввода значений параметров принимает вводимую изменяемую переменную, а поле 258 ввода значений параметров принимает вводимое новое значение для переменной. Поле 256 ввода значений параметров изображено на фиг. 10 в форме ниспадающего списка, но может являться полем ввода любого типа.
[0057] Фиг. 11 иллюстрирует выбор команды Soak (команды выдерживанияь) в элементе 236 управления выбором сегмента. Тип сегмента Soak при выполнении сегмента встроенным контроллером 154 вызывает паузу в многоэтапной последовательности команд, пока регулятор 100 реагирует на изменение значения рабочей точки для шага, с последующим удержанием на новом значении рабочей точки в течение указанного промежутка времени. Поле 260 ввода значения параметра рассчитано на прием значения, определяющего диапазон (выше/ниже) текущего значения рабочей точки и, как только обратная связь попадает вовнутрь заданного диапазона, регулятор 100 поддерживает новое значение рабочей точки в течение промежутка времени, введенного в поле 262 ввода значений параметров.
[0058] Фиг. 12 и 13 иллюстрируют выбор в элементе 236 управления выбором сегментов типа сегмента Digital Output (цифровой вывод) и Digital Input (цифровой ввод), соответственно. Первый из них посылает пусковой сигнал технологическому процессу в другой части системы для вывода сигнала, указанного в поле 264 ввода значения параметра, на порт цифрового вывода регулятора 100, указанный в поле 266 ввода значений параметров. Аналогично, тип сегмента Digital Input вызывает паузу в выполнении профиля до момента, когда входное значение, указанное в поле 268 ввода значений параметров поступает на цифровой порт, указанный в поле 270 ввода значений параметров.
[0059] Фиг. 14 иллюстрирует настройку элемента 236 управления выбором сегмента на тип сегмента If (сегмента "если"). Тип сегмента If облегчает отклик встроенного контроллера 154 на текущее состояние регулятора 100 и его окружения. В частности, тип сегмента If принуждает встроенный контроллер к оценке того, соответствует ли параметр текущего состояния системы предварительно определенному условию. Предварительно определенное условие задают с помощью поля 270 ввода переменной, поля 272 ввода оператора и поля 274 значения для некоторых переменных. Для других переменных предварительно определенное условие задают с помощью поля 270 ввода переменной и поля 276 выбора двоичного значения, как показано на фиг. 16. На фиг. 15 разнообразие условий отображается в выпадающем меню, связанном с переменной. Переменными, которые можно выбирать для оценки с помощью типа сегмента If, являются среди прочих внутренняя обратная связь (например, датчик 140), внешняя обратная связь (например, датчик 106), аналоговое заданное значение и др. В других вариантах реализации возможен доступ к другим переменным, поскольку представленные на фиг. 15 варианты являются лишь примерами. Поле 272 ввода символа операции позволяет пользователю задавать тип сравнения для недвоичного значения (например, "больше чем", "меньше чем", "не меньше чем", "не больше чем", "равняется" и др.). Если значение выбранной переменной является двоичным, как в случае цифрового ввода (значениям могут являться высокий и низкий уровень, 1 и 0 и т.д.), элемент 276 выбора двоичного значения позволяет пользователю выбирать требуемое значение, оцениваемое как "истинное".
[0060] В некоторых вариантах реализации, когда встроенный контроллер 154 регулятора 100 выполняет оператор If, контроллер 154 оценивает условный оператор и, если этот оператор оказывается "истинным", выполняет следующий по очереди командный сегмент в профиле. Если указанный оператор оценивается как "ложное", то следующий по счету командный сегмент в профиле пропускается. В других вариантах реализации может действовать противоположное правило - оценка в качестве "ложного" может приводить к выполнению следующего по очереди командного сегмента, а оценка в качестве "истинного" может вызывать пропуск очередного по счету сегмента. В некоторых вариантах реализации дополнительное поле ввода значений параметров (не показанное здесь) позволяет пользователю задавать, будут ли обеспечивать выполнение следующего по счету командного сегмента в профиле или истинные операторы, или ложные операторы.
[0061] Goto ("перейти к") является дополнительным типом сегмента, который можно выбирать с помощью элемента 236 выбора сегмента, как показано на фиг. 17. Выбор типа сегмента Goto приводит к отображению поля 278 ввода значений параметров, в которое вводится номер сегмента для выполнения следующим по счету. Тип сегмента Goto является типом сегмента ветвления, который обычно приводит к пропуску одного или большего количества сегментов между текущим сегментом и сегментом, номер которого указан в поле ввода 278.
[0062] На фиг. 18 и 19 приведены примеры профилей, в которых используются операторы If и Goto в варианте реализации изобретения. На фиг. 18 третий сегмент (3) содержит оператор If, по которому оценивается выражение Feedback > 20%. Встроенный контроллер 154, выполняющий командный сегмент 3 в профиле, изображенном на фиг. 18, будет сравнивать значение сигнала "Feedback" (обратная связь) с 20%. Указанное выражение будет оценено в качестве "истинного", если значение "Feedback" превысит (>) 20%, и "ложного", если значение "Feedback" не превысит 20%. Если сегмент 3 получает оценку "истинного", встроенный контроллер 154 выполнит следующий командный сегмент в профиле (сегмент 4 - "STEP ТО 80 PSI"). Если, с другой стороны, сегмент 3 получает оценку "ложный", то встроенный контроллер 154 пропустит очередной по счету командный сегмент в профиле (сегмент 4) и вместо него выполнит следующий за ним сегмент (сегмент 5 - "STEP to 70 PSI").
[0063] На фиг. 19 третий сегмент (3) вновь содержит оператор If, по которому оценивается выражение Feedback>20%. В очередной раз встроенный контроллер 154, выполняющий командный сегмент 3 в профиле, изображенном на фиг. 19, будет сравнивать значение сигнала "Feedback" (обратная связь) с 20%. Указанное выражение будет оценено в качестве "истинного", если значение "Feedback" превысит (>) 20%, и "ложного", если значение "Feedback" не превысит 20%. Однако в случае, изображенном на фиг. 19, если сегмент 3 получает оценку "истинного", встроенный контроллер 154 выполнит следующий командный сегмент в профиле (сегмент 4 - "GOTO 6"). Команда "GOTO 6" вызовет пропуск встроенным контроллером 154 сегмента 5 и возобновление выполнения с сегмента 6. Контроллер 154 выполнит последующие команды вплоть до сегмента 9 ("GOTO 11"), а после его выполнения контроллер 154 перейдет к сегменту "END" (конец). Если, с другой стороны, сегмент 3 получает оценку "ложный", встроенный контроллер 154 пропустит очередной по счету командный сегмент в профиле (сегмент 4) и вместо него выполнит следующий за ним сегмент (сегмент 5 - "GOTO 10"). Команда "GOTO 10" вызовет пропуск контроллером 154 сегментов 6 - 9 и возобновление выполнения с сегмента 10. Как можно видеть из этих примеров, контроллер 154 выполняет сегменты профиля 1-4, 6-9 и 11, если "Feedback > 20%" оценивается в качестве истинного состояния, и сегменты профиля 1-3, 5, 10 и 11, если "Feedback > 20%" оценивается в качестве ложного состояния.
[0064] На фиг. 20 в виде логической блок-схемы приведен пример способ 300 управления электронным регулятором давления 100. Процессор встроенного контроллера 154 принимает многоэтапную последовательность команд через электронное соединение (блок 305). Электронное соединение может представлять собой беспроводное соединение - такое, как WiFi-соединение (или любое другое соединение соответствующее протоколу IEEE 802.11 или любому протоколу беспроводной передачи данных) - или проводное соединение (например, USB-соединение). Процессор запрограммирован на выполнение многоэтапной последовательности (блок 310) и при включении его в работу выполняет многоэтапную последовательность (блок 315).
[0065] В варианте реализации многоэтапная последовательность команд содержит по меньшей мере один условный оператор, вызывающий выполнение процессором первой команды, если условный оператор оценивается как истинный, и второй команды, если условный оператор оценивается как ложный. В вариантах реализации первой командой является команда, следующая за условным оператором, а второй командой является команда, следующая за первой командой. В других вариантах реализации второй командой является команда, следующая за условным оператором, а первой командой является команда, следующая за первой второй. Условным оператором может являться оператор "if, вызывающий выполнение команды, следующей за оператором "if, если условный оператор оказывается истинным, и пропуск команды, следующей за оператором "if, если условный оператор оказывается ложным. Условный оператор позволяет осуществлять сравнение показаний любого внутреннего датчика, любого внешнего датчика, принятого значения в виде цифрового сигнала или принятого значение в виде аналогового сигнала.
[0066] В некоторых вариантах реализации многоэтапная последовательность команд содержит, по меньшей мере, один оператор ветвления. Оператор ветвления представляет собой команду перехода "goto", которая в некоторых вариантах реализации принуждает процессор, выполняющий многоэтапную последовательность команд, к пропуску одной или большего количества команд последовательности и к возобновлению выполнения последовательности с более поздней команды последовательности.
[0067] В вариантах реализации первой командой, следующей за условным оператором, может являться первый оператор ветвления (например, первая команда "goto"), а второй командой, следующей за первой командой, может являться второй оператор ветвления (например, вторая команда "goto").
[0068] Логическая блок-схема на фиг. 21 иллюстрирует способ 320 для программирования электронного регулятора давления. Способ представляет собой реализуемый с помощью компьютера способ, осуществляемый посредством инструкций программного обеспечения, запоминаемых на машиночитаемом носителе (исключая кратковременные сигналы) и выполняемых процессором, например, компьютера 108. Процессор получает результат выбора в виде множества команд, отбираемых из набора доступных команд с целью формирования многоэтапной последовательности команд (блок 325). Процессор принимает также значения в пользовательском определении для связывания с каждой из множества выбранных команд (блок 330) и связывает принятые значения в пользовательском определении с соответствующими выбранными командами (блок 335). Процессор принимает в качестве одной из множества команд результат выбора условного оператора (блок 340), принимает для условного оператора результат выбора параметра и значения параметра (блок 345) и связывает принятый параметр и принятое значение параметра с условным оператором (блок 350). Процессор принимает выбор в качестве команды, подлежащей выполнению, первой команды, если условный оператор оценивается как истинный (блок 355), и принимает выбор в качестве команды, подлежащей выполнению, второй команды, если условный оператор оценивается как ложный (блок 360). Далее процессор программирует электронный регулятор давления на выполнение многоэтапной последовательности команд (блок 365). Следует заметить, что в вариантах реализации некоторые из указанных выше шагов опускаются, комбинируются между собой, дополняются или перестраиваются по очередности выполнения.
[0069] Если специально не указано иное, обсуждение в настоящем документе с использованием таких слов, как "обработка", "вычисление", "расчет", "определение", "идентификация", "представление", "отображение" и тому подобное, может относиться к действиям или процессам машины (например, компьютера), которая манипулирует данными или преобразует данные, представленными в виде физических (например, электронных, магнитных или оптических) количественных значений внутри одного или большего количества запоминающих устройств (например, энергозависимого запоминающего устройства, энергонезависимого запоминающего устройства или их сочетания), регистров или других компонентов машины, которые получают, сохраняют, передают или отображают информацию.
[0070] При реализации в программном обеспечении любое из приложений, служб, механизмов, программ и модулей, описанных в настоящем документе, может храниться в любом материальном некратковременном машиночитаемом запоминающем устройстве, таком как магнитный диск, лазерный диск, твердотельное запоминающее устройство, молекулярное запоминающее устройство, оптический диск или другой носитель информации, в ОЗУ или ПЗУ компьютера или процессора и т.д. Хотя раскрытые в настоящем документе примеры систем представлены как системы, содержащие среди прочих компонентов программное обеспечение и/или программно-аппаратное обеспечение, выполняемое на аппаратном обеспечении, следует отметить, что такие системы являются только иллюстративными, и их не следует рассматривать, как ограничивающие. Например, предполагается, что любые или все из компонентов этих программного обеспечения, аппаратного обеспечения и программно-аппаратного обеспечения могут быть воплощены исключительно в аппаратном обеспечении, исключительно в программном обеспечении или в любой комбинации аппаратного и программного обеспечения. Соответственно, специалисту в данной области техники будет понятно, что представленные примеры не являются единственным способом для реализации таких систем.
[0071] Таким образом, хотя настоящее изобретение было описано со ссылкой на конкретные примеры, которые предполагаются только иллюстративными, и не ограничивающими настоящее изобретение, специалистам в данной области техники будет понятно, что в раскрытые варианты осуществления изобретения могут быть внесены изменения, дополнения или удаления без отступления от сущности и объема настоящего изобретения.
[0072] Следующие аспекты иллюстрируют примеры вариантов реализации описываемых здесь способов и систем. Данный перечень аспектов не подразумевает какие- или ограничения, поскольку другие варианты реализации ясно различимы при рассмотрении настоящего описания.
[0073] 1. Электронный регулятор давления, содержащий: корпус регулятора, имеющий впускное отверстие, соединенное с источником нагнетающего давления, выпускное отверстие для выпуска управляемого давления и выходное отверстие; впускной клапан соединен на своем входе с нагнетающим давлением, а на своем выходе с выпускным отверстием; выпускной клапан соединен на своем входе с выпускным отверстием, а на своем выходе с выходным отверстием; контроллер, расположенный внутри корпуса регулятора, выполнен с возможностью приведения в действие впускного клапана и выпускного клапана с целью регулировки управляемого давления, поданного на выпускное отверстие; контроллер содержит процессор, запрограммированный на прием и выполнение многоэтапной последовательности команд, включающей в себя условный оператор, вызывающий выполнение процессором первой команды, если условный оператор оценивается как истинный, и второй команды, если условный оператор оценивается как ложный.
[0074] 2. Электронный регулятор давления по аспекту 1, в котором процессор запрограммирован на прием и выполнение многоэтапной последовательности команд, включающей в себя в качестве или первой команды, или второй команды оператор ветвления, вызывающий выполнение процессором непоследовательной команды.
[0075] 3. Электронный регулятор давления по аспекту 2, в котором оператором ветвления является оператор GOTO.
[0076] 4. Электронный регулятор давления по любому из предшествующих аспектов, в котором условным оператором является оператор IF.
[0077] 5. Электронный регулятор давления по любому из предшествующих аспектов, в котором первая команда следует за условным оператором и в котором вторая команда следует за первой командой.
[0078] 6. Электронный регулятор давления по любому из аспектов 1-4, в котором вторая команда следует за условным оператором и в котором первая команда следует за второй командой.
[0079] 7. Электронный регулятор давления по любому из предшествующих аспектов, в котором процессор запрограммирован на прием и выполнение многоэтапной последовательности команд, принуждающей технологический процесс к изменению рабочей точки регулятора.
[0080] 8. Электронный регулятор давления по любому из предшествующих аспектов, в котором процессор запрограммирован на прием и выполнение многоэтапной последовательности команд, содержащей команду линейного изменения (ramp command).
[0081] 9. Электронный регулятор давления по любому из предшествующих аспектов, в котором процессор запрограммирован на прием и выполнение многоэтапной последовательности команд, содержащей команду выполнения шага (step command).
[0082] 10. Электронный регулятор давления по любому из предшествующих аспектов, в котором процессор запрограммирован на прием и выполнение многоэтапной последовательности команд, содержащей команду команду задержки (dwell command).
[0083] 11. Электронный регулятор давления по любому из предшествующих аспектов, в котором процессор запрограммирован на прием и выполнение многоэтапной последовательности команд, содержащей команду выполнения цикла (loop command).
[0084] 12. Электронный регулятор давления по любому из предшествующих аспектов, в котором процессор запрограммирован на прием и выполнение многоэтапной последовательности команд, содержащей команду изменения (delta command).
[0085] 13. Электронный регулятор давления по любому из предшествующих аспектов, в котором процессор запрограммирован на прием и выполнение многоэтапной последовательности команд, содержащей команду выдерживания (soak command).
[0086] 14. Электронный регулятор давления по любому из предшествующих аспектов, в котором процессор запрограммирован на прием и выполнение многоэтапной последовательности команд, содержащей команду, принуждающую контроллер к выводу электрического или электронного сигнала к другому устройству.
[0087] 15. Электронный регулятор давления по любому из предшествующих аспектов, в котором процессор запрограммирован на прием и выполнение многоэтапной последовательности команд, содержащей команду, принуждающую контроллер к ожиданию установления на конкретном входе указанного значения или состояния перед выполнением последующих команд.
[0088] 16. Электронный регулятор давления по любому из предшествующих аспектов, в котором контроллер дополнительно содержит вход датчика.
[0089] 17. Электронный регулятор давления по аспекту 16, в котором вход датчика выполнен с возможностью приема сигнала от датчика, считывающего регулируемое давление.
[0090] 18. Электронный регулятор давления по аспекту 16, в котором вход датчика выполнен с возможностью приема сигнала от датчика, который считывает значение параметра, управляемого регулируемым давлением.
[0091] 19. Электронный регулятор давления по аспекту 16 или 17, в котором процессор запрограммирован на выполнение многоэтапной последовательности команд, содержащей условный оператор, по которому значение, поступающее через вход датчика, сравнивается со значением для сопоставления.
[0092] 20. Соответствующий аспекту 16 или аспекту 17 электронный регулятор давления, в котором процессор запрограммирован на выполнение многоэтапной последовательности команд, содержащей условный оператор, по которому значение, поступающее от внешнего устройства, сравнивается со значением для сопоставления.
[0093] 21. Способ управления электронным регулятором давления, причем способ содержит: прием процессором, расположенным внутри корпуса регулятора, многоэтапной последовательности команд через электронное соединение; программирование процессора на выполнение многоэтапной последовательности команд; и выполнение многоэтапной последовательности команд, причем многоэтапная последовательность команд содержит условный оператор, принуждающий процессор к выполнению первой команды, если условный оператор оценивается как истинный, и второй команды, если условный оператор оценивается как ложный.
[0094] 22. Способ по аспекту 21, в котором программирование процессора на выполнение многоэтапной последовательности команд содержит программирование процессора на выполнение многоэтапной последовательности команд, содержащей в качестве или первой команды, или второй команды оператор ветвления, принуждающий процессор к выполнению непоследовательной команды.
[0095] 23. Способ по аспекту 22, в котором оператором ветвления является оператор GOTO.
[0096] 24. Способ по любому из аспектов 21-23, в котором условным оператором является оператор IF.
[0097] 25. Способ по любому из аспектов 21-24, в котором программирование процессора на выполнение многоэтапной последовательности команд содержит программирование процессора на выполнение команды, следующей непосредственно за условным оператором, если условный оператор оценивается как истинный, и на пропуск команды, следующей непосредственно за условным оператором, если условный оператор оценивается как ложный.
[0098] 26. Способ по любому из аспектов 21-24, в котором программирование процессора на выполнение многоэтапной последовательности команд содержит программирование процессора на выполнение команды, следующей непосредственно за условным оператором, если условный оператор оценивается как ложный, и на пропуск команды, следующей непосредственно за условным оператором, если условный оператор оценивается как истинный.
[0099] 27. Способ по любому из аспектов 21-26, в котором программирование процессора на выполнение многоэтапной последовательности команд содержит программирование процессора на выполнение команды, принуждающей контроллер к выводу электрического или электронного сигнала к другому устройству.
[0100] 28. Способ по любому из аспектов 21-27, в котором программирование процессора на выполнение многоэтапной последовательности команд содержит программирование процессора на оценку условного оператора, сравнивающего значение на входе датчика со значением для сопоставления.
[0101] 29. Способ по любому из аспектов 21-28, в котором программирование процессора на выполнение многоэтапной последовательности команд содержит программирование процессора на оценку условного оператора, сравнивающего значение, полученное от внешнего устройства, со значением для сопоставления.
[0102] 30. Способ по любому из аспектов 21-29, в котором программирование процессора на выполнение многоэтапной последовательности команд содержит программирование процессора на оценку условного оператора, сравнивающего показания датчика, расположенного внутри корпуса регулятора, со значением для сопоставления.
[0103] 31. Реализуемый с помощью компьютера способ управления электронным регулятором давления, причем способ содержит: принятие выбора множества команд, отбираемых из набора доступных команд, причем множество команд образует многоэтапную последовательность команд; принятие определяемых пользователем значений для связывания с каждой из множества выбранных команд; связывание принятых значений в пользовательском определении с соответствующими выбранными командами; принятие выбора условного оператора как одной из множества команд; принятие выбора параметра и значения параметра для условного оператора; связывание принятого параметра и принятого значения параметра с условным оператором; принятие выбора первой команды, подлежащей выполнению, как одной из множества команд, если условный оператор оценивается как истинный; принятие выбора второй команды, подлежащей выполнению, как одной из множества команд, если условный оператор оценивается как ложный; и программирование электронного регулятора давления на выполнение многоэтапной последовательности команд.
[0104] 32. Реализуемый с помощью компьютера способ по аспекту 31, в котором принятие выбора условного оператора содержит принятие выбора оператора IF.
[0105] 33. Реализуемый с помощью компьютера способ по аспекту 31 или 32, в котором: принятие выбора первой команды, подлежащей выполнению, в случае оценки условного оператора в качестве истинного, содержит принятие выбора команды GOTO; или принятие выбора второй команды, подлежащей выполнению, в случае оценки условного оператора в качестве ложного, содержит принятие выбора команды GOTO.
[0106] 34. Реализуемый с помощью компьютера способ по любому из аспектов 31-33, в котором связывание принятого параметра и принятого значения параметра с условным оператором содержит связывание условного оператора с выходным сигналом датчика.
[0107] 35. Реализуемый с помощью компьютера способ по аспекту 34, в котором связывание условного оператора с выходным сигналом датчика содержит связывание условного оператора с выходным сигналом датчика внутри регулятора.
[0108] 36. Реализуемый с помощью компьютера способ по аспекту 34, в котором связывание условного оператора с выходным сигналом датчика содержит связывание условного оператора с выходным сигналом датчика, внешнего по отношению к регулятору.
[0109] 37. Реализуемый с помощью компьютера способ по любому из аспектов 31-36, в котором связывание принятого параметра и принятого значения параметра с условным оператором содержит связывание условного оператора с сигналом, полученным от внешнего устройства.
[0110] 38. Реализуемый с помощью компьютера способ по любому из аспектов 31-37, в котором первая команда следует за условным оператором и в котором вторая команда следует за первой командой.
[0111] 39. Реализуемый с помощью компьютера способ по любому из аспектов 31-37, в котором вторая команда следует за условным оператором и в котором первая команда следует за второй командой.
[0112] 40. Реализуемый с помощью компьютера способ по любому из аспектов 31-39, в котором первая команда или вторая команда содержит команду на изменение рабочей точки регулятора.
[0113] 41. Реализуемый с помощью компьютера способ по любому из аспектов 31-40, в котором первая команда или вторая команда содержит команду на вывод электрического или электронного сигнала от регулятора к другому устройству.
Управление электронным регулятором давления в системе управления технологическими процессами осуществляется согласно профилю, созданному пользователем на компьютере, соединенном с устройством. Профиль представляет собой многоэтапную последовательность команд. Профиль содержит по меньшей мере один условный оператор и дополнительно по меньшей мере один оператор ветвления. Другими словами, профиль содержит по меньшей мере один условный оператор, который вызывает выполнение устройством первой команды или второй команды в зависимости от того, является ли условный оператор истинным или ложным, соответственно. Возможно также наличие в профиле оператора (например, оператора "goto"), вызывающего пропуск устройством одной или большего количества команд в профиле. Обеспечивается возможность программирования электронного регулятора давления. 3 н. и 38 з.п. ф-лы, 21 ил.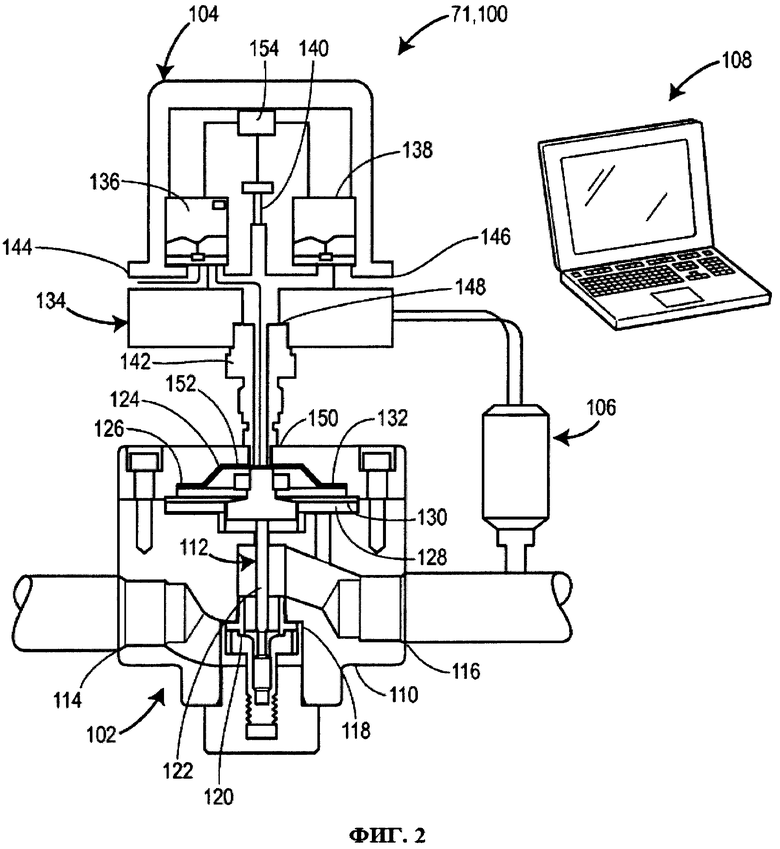
1. Электронный регулятор давления, содержащий:
корпус регулятора, имеющий впускное отверстие, соединенное с источником нагнетающего давления, выпускное отверстие для выпуска управляемого давления и выходное отверстие;
впускной клапан, соединенный на своем входе с нагнетающим давлением и на своем выходе с выпускным отверстием;
выпускной клапан, соединенный на своем входе с выпускным отверстием и на своем выходе с выходным отверстием; и
контроллер, расположенный внутри корпуса регулятора и выполненный с возможностью приведения в действие впускного клапана и выпускного клапана для регулировки управляемого давления, подаваемого на выпускное отверстие, причем контроллер содержит процессор, запрограммированный на прием и выполнение многоэтапной последовательности команд, содержащей условный оператор, принуждающий процессор к выполнению первой команды, если условный оператор оценивается как истинный, и второй команды, если условный оператор оценивается как ложный.
2. Электронный регулятор давления по п. 1, в котором процессор запрограммирован на прием и выполнение многоэтапной последовательности команд, включающей в себя в качестве или первой команды, или второй команды оператор ветвления, вызывающий выполнение процессором непоследовательной команды.
3. Электронный регулятор давления по п. 2, в котором оператором ветвления является оператор GOTO.
4. Электронный регулятор давления по п. 1, в котором условным оператором является оператор IF.
5. Электронный регулятор давления по п. 1, в котором первая команда следует за условным оператором, а вторая команда следует за первой командой.
6. Электронный регулятор давления по п. 1, в котором вторая команда следует за условным оператором, а первая команда следует за второй командой.
7. Электронный регулятор давления по п. 1, в котором процессор запрограммирован на прием и выполнение многоэтапной последовательности команд, принуждающей указанный технологический процесс к изменению рабочей точки регулятора.
8. Электронный регулятор давления по п. 1, в котором процессор запрограммирован на прием и выполнение многоэтапной последовательности команд, содержащей команду линейного изменения (ramp command).
9. Электронный регулятор давления по п. 1, в котором процессор запрограммирован на прием и выполнение многоэтапной последовательности команд, содержащей команду выполнения шага (step command).
10. Электронный регулятор давления по п. 1, в котором процессор запрограммирован на прием и выполнение многоэтапной последовательности команд, содержащей команду задержки (dwell command).
11. Электронный регулятор давления по п. 1, в котором процессор запрограммирован на прием и выполнение многоэтапной последовательности команд, содержащей команду выполнения цикла (loop command).
12. Электронный регулятор давления по п. 1, в котором процессор запрограммирован на прием и выполнение многоэтапной последовательности команд, содержащей команду изменения (delta command).
13. Электронный регулятор давления по п. 1, в котором процессор запрограммирован на прием и выполнение многоэтапной последовательности команд, содержащей команду выдерживания (soak command).
14. Электронный регулятор давления по п. 1, в котором процессор запрограммирован на прием и выполнение многоэтапной последовательности команд, содержащей команду, принуждающую контроллер к выводу электрического или электронного сигнала к другому устройству.
15. Электронный регулятор давления по п. 1, в котором процессор запрограммирован на прием и выполнение многоэтапной последовательности команд, содержащей команду, принуждающую контроллер к ожиданию установления на заданном входе указанного значения или состояния перед выполнением последующих команд.
16. Электронный регулятор давления по п. 1, в котором контроллер дополнительно содержит вход датчика.
17. Электронный регулятор давления по п. 16, в котором вход датчика выполнен с возможностью приема сигнала от датчика, считывающего регулируемое давление.
18. Электронный регулятор давления по п. 16, в котором вход датчика выполнен с возможностью приема сигнала от датчика, который считывает значение параметра, управляемого регулируемым давлением.
19. Электронный регулятор давления по п. 16, в котором процессор запрограммирован на выполнение многоэтапной последовательности команд, содержащей условный оператор, сравнивающий значение, поступающее через вход датчика, со значением для сопоставления.
20. Электронный регулятор давления по п. 1, в котором процессор запрограммирован на выполнение многоэтапной последовательности команд, содержащей условный оператор, сравнивающий значение, поступающее от внешнего устройства, со значением для сопоставления.
21. Способ управления электронным регулятором давления, содержащий:
принятие процессором, расположенным внутри корпуса регулятора, многоэтапной последовательности команд через электронное соединение;
программирование процессора на выполнение многоэтапной последовательности команд и
выполнение многоэтапной последовательности команд,
причем многоэтапная последовательность команд содержит условный оператор, вызывающий выполнение процессором первой команды, если условный оператор оценивается как истинный, и второй команды, если условный оператор оценивается как ложный.
22. Способ по п. 21, в котором программирование процессора на выполнение многоэтапной последовательности команд содержит программирование процессора на выполнение многоэтапной последовательности команд, содержащей в качестве или первой команды, или второй команды оператор ветвления, принуждающий процессор к выполнению непоследовательной команды.
23. Способ по п. 22, в котором оператором ветвления является оператор GOTO.
24. Способ по п. 21, в котором оператором ветвления является оператор IF.
25. Способ по п. 21, в котором программирование процессора на выполнение многоэтапной последовательности команд содержит программирование процессора на выполнение команды, следующей непосредственно за условным оператором, если условный оператор оценивается как истинный, и на пропуск команды, следующей непосредственно за условным оператором, если условный оператор оценивается как ложный.
26. Способ по п. 21, в котором программирование процессора на выполнение многоэтапной последовательности команд содержит программирование процессора на выполнение команды, следующей непосредственно за условным оператором, если условный оператор оценивается как ложный, и на пропуск команды, следующей непосредственно за условным оператором, если условный оператор оценивается как истинный.
27. Способ по п. 21, в котором программирование процессора на выполнение многоэтапной последовательности команд содержит программирование процессора на выполнение команды, принуждающей контроллер к выводу электрического или электронного сигнала к другому устройству.
28. Способ по п. 21, в котором программирование процессора на выполнение многоэтапной последовательности команд содержит программирование процессора на оценку условного оператора, сравнивающего значение на входе датчика со значением для сопоставления.
29. Способ по п. 21, в котором программирование процессора на выполнение многоэтапной последовательности команд содержит программирование процессора на оценку условного оператора, сравнивающего значение, полученное от внешнего устройства, со значением для сопоставления.
30. Способ по п. 21, в котором программирование процессора на выполнение многоэтапной последовательности команд содержит программирование процессора на оценку условного оператора, сравнивающего показания датчика, расположенного внутри корпуса регулятора, со значением для сопоставления.
31. Реализуемый с помощью компьютера способ программирования электронного регулятора давления, содержащий:
принятие выбора множества команд, отбираемых из совокупности доступных команд, причем множество команд образует многоэтапную последовательность команд;
принятие определяемых пользователем значений для связывания с каждой из множества выбранных команд;
связывание определяемых пользователем значений с соответствующими выбранными командами;
принятие выбора условного оператора как одной из множества команд;
принятие выбора параметра и значения параметра для условного оператора;
связывание принятого параметра и принятого значения параметра с условным оператором;
принятие выбора первой команды, подлежащей выполнению, как одной из множества команд, если условный оператор оценивается как истинный;
принятие выбора второй команды, подлежащей выполнению, как одной из множества команд, если условный оператор оценивается как ложный, и
программирование электронного регулятора давления на выполнение многоэтапной последовательности команд.
32. Реализуемый с помощью компьютера способ по п. 31, в котором принятие выбора условного оператора содержит принятие выбора оператора IF.
33. Реализуемый с помощью компьютера способ по п. 31, в котором:
принятие выбора первой команды, подлежащей выполнению, в случае оценки условного оператора в качестве истинного содержит принятие выбора команды GOTO; или
принятие выбора второй команды, подлежащей выполнению, в случае оценки условного оператора в качестве ложного содержит принятие выбора команды GOTO.
34. Реализуемый с помощью компьютера способ по п. 31, в котором связывание принятого параметра и принятого значения параметра с условным оператором содержит связывание условного оператора с выходным сигналом датчика.
35. Реализуемый с помощью компьютера способ по п. 34, в котором связывание условного оператора с выходным сигналом датчика содержит связывание условного оператора с выходным сигналом датчика внутри регулятора.
36. Реализуемый с помощью компьютера способ по п. 34, в котором связывание условного оператора с выходным сигналом датчика содержит связывание условного оператора с выходным сигналом датчика, внешнего по отношению к регулятору.
37. Реализуемый с помощью компьютера способ по п. 31, в котором связывание принятого параметра и принятого значения параметра с условным оператором содержит связывание условного оператора с сигналом, полученным от внешнего устройства.
38. Реализуемый с помощью компьютера способ по п. 31, в котором первая команда следует за условным оператором, а вторая команда следует за первой командой.
39. Реализуемый с помощью компьютера способ по п. 31, в котором вторая команда следует за условным оператором, а первая команда следует за второй командой.
40. Реализуемый с помощью компьютера способ по п. 31, в котором первая команда или вторая команда содержит команду на изменение рабочей точки регулятора.
41. Реализуемый с помощью компьютера способ по п. 31, в котором первая команда или вторая команда содержит команду на вывод электрического или электронного сигнала от регулятора к другому устройству.
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| САМОЦЕНТРИРУЮЩАЯ МАГНИТНАЯ СБОРКА ДЛЯ УСТРОЙСТВА ИЗМЕРЕНИЯ ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ | 2001 |
|
RU2276397C2 |
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| HYESOON KIM & et al | |||
| Wish Branch: A New Control Flow Instruction Combining Conditional Branching and Predicated Execution | |||
| High Performance Systems Group Department of Electrical and Computer Engineering The University of Texas at Austin Austin, Texas 78712-0240 | |||
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| US 5047965 A, 10.09.1991 | |||
| US 5682878 A, 04.11.1997 | |||
| US 5142483 A, 25.08.1992 | |||
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Бердо для ткацкого станка | 1933 |
|
SU36300A1 |

