Область техники
Изобретение относится к способу и устройству для передачи или приема двоичного сигнала, т.е. сигнала имеющего два возможных состояния, в частности анизохронного сигнала, согласно ограничительной части независимых пунктов.
Уровень техники
Частотная манипуляция (FSK=Frequency Shift Keying) является давно известным асинхронным методом модуляции, обладающим небольшой эффективностью ширины полосы около 0,7 бит/с/Гц, тогда как с помощью современных синхронных методов квадратичной или МС-модуляции при равной помехоустойчивости достигается эффективность около 3 бит/с/Гц. Тем не менее, метод FSK и сегодня еще применяется в особых случаях, поскольку он пригоден для анизохронных двоичных данных, т.е. для двоичных сигналов, не привязанных к определенному такту. Далее он пригоден для многоточечной передачи, обладает коротким временем задержки сигнала порядка нескольких длин символа и коротким временем восстановления после прерывания.
Для передачи анизохронных данных могут применяться, правда, также изохронные, т.е. привязанные к такту, форматы. Подходящий метод преобразования изложен в рекомендации Международного союза электросвязи №R.111. За счет преобразования скорость передаваемых данных, однако, примерно учетверяется, так что эффективность ширины полосы также невелика.
Системы многоточечной передачи состоят из центральной станции и нескольких внешних станции, связанных одним каналом передачи Центральная станция периодически обменивается данными со всеми внешними станциями, причем размер пакетов данных часто мал (например, несколько десятков бит). Важной величиной у подобных систем является время цикла, т.е. время, необходимое центральной станции для однократного обмена данными со всеми внешними станциями При малом размере пакетов данных время цикла зависит, в первую очередь, от времени задержки сигнала и времени для прекращения и создания соединения при смене с одной внешней станции на другую. Это время в известных синхронных методах модуляции существенно длиннее, чем в асинхронных методах, таких как метод FSK.
Сущность изобретения
Поэтому задачей изобретения является создание способа и устройства описанного выше рода, которые обладали бы большей эффективностью ширины полосы, чем метод модуляции FSK, по возможности, без существенных потерь упомянутых выше преимуществ этого метода модуляции
Эта задача решается посредством способа и устройства согласно независимым пунктам. Согласно изобретению задают, следовательно, по меньшей мере, три разнофазных состояния, которые может принимать переданный сигнал. Кроме того, задают, по меньшей мере, одну последовательность прохождения через состояния, причем при каждой смене исходного сигнала состояние переданного сигнала обычно изменяется в соответствии с данной последовательностью прохождения на следующее состояние. Таким образом, приемное устройство при каждом изменении состояния может судить о смене сигнала с 0 на 1 или с 1 на 0, причем благодаря применению, по меньшей мере, трех состояний используемую ширину частоты можно уменьшить. Для того чтобы приемное устройство могло определить, является ли сигнал в данный момент 0 или 1, т.е. для синхронизации передающего и приемного устройств, когда исходный сигнал в течение заданного минимального времени не изменяет состояния, в соответствии с заданным правилом при следующей смене исходного сигнала в зависимости от его мгновенного значения происходит замена либо на следующее состояние согласно последовательности прохождения, либо на другое состояние.
При этом используют то обстоятельство, что когда сигнал остается постоянным дольше, в распоряжении имеется свободная ширина полосы для передачи мгновенного значения исходного сигнала. Приемное устройство может, тем самым, определить мгновенное значение путем применения правила.
Особенно хорошее использование имеющейся в распоряжении ширины полосы возникает тогда, когда задают n>2 состояний Z0-Zn-1, фазы которых имеют значения 0, 2·pi/n, 4·pi/n,...(n-1)·2·pi/n. Последовательность прохождения в этом случае такова, что она происходит через состояния Zi с возрастающим или убывающим показателем i. Преимущественно правило, также в отношении эффективности ширины полосы, выбирают так, что исходя из состояния с показателем i при следующей смене исходного сигнала в зависимости от его мгновенного значения происходит смена либо на состояние с показателем (i+1) mod n, либо на состояние с показателем (i-1) mod n, причем, например, направление последовательности прохождения может быть обратным.
Краткое описание чертежей
Другие выполнения, преимущества и применения изобретения приведены в зависимых пунктах и в нижеследующем описании с помощью фигур, изображающих:
- фиг.1: передаваемый исходный сигнал и два выведенных из него частичных сигнала;
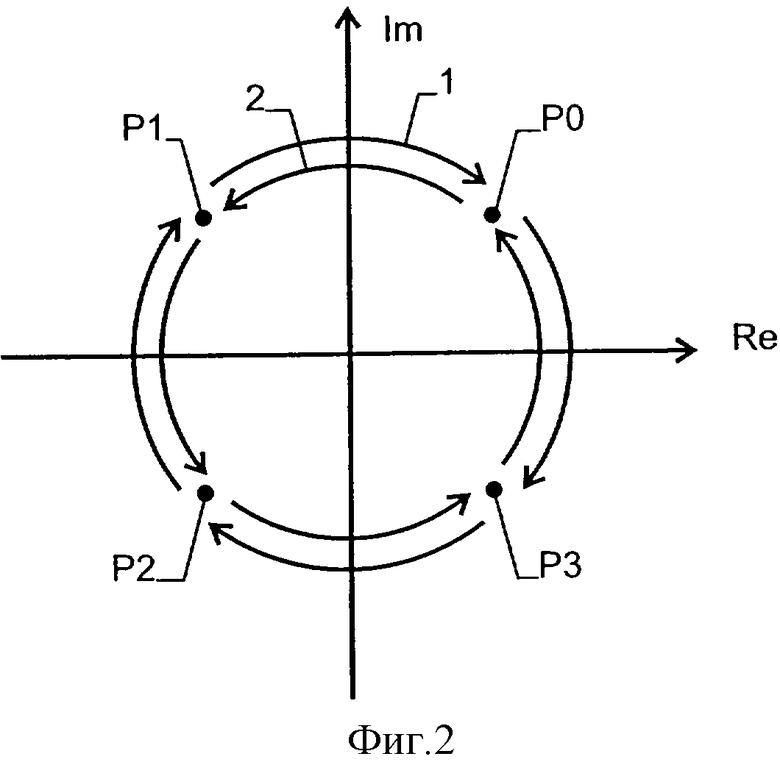
- фиг.2: состояния передаваемого сигнала;
- фиг.3: первую часть передающего устройства;
- фиг.4: вторую часть передающего устройства;
- фиг.5: первую часть приемного устройства;
- фиг 6: вторую часть приемного устройства,
- фиг.7: характеристики сигнала в приемном устройстве;
- фиг.8: восемь возможных состояний передаваемого сигнала.
Описание предпочтительных вариантов изобретения
На первом этапе, со ссылкой на фиг.1, описано осуществление способа согласно изобретению.
Верхняя часть фиг.1 показывает передаваемый двоичный исходный сигнал D. При этом речь может идти об изохронном или анизохронном сигнале с тем условием, что его время символа не должно быть ниже данного разрешающего времени Т, т.е. после смены состояния исходный сигнал должен оставаться постоянным, по меньшей мере, в течение разрешающего времени Т.
При одном возможном рассмотрении способа исходный сигнал D разделяется передающим устройством на два частичных сигнала D1 и DQ с половиной скорости передачи данных, которые могут иметь, например, значения 1 или -1 каждый. Для вырабатывания частичных сигналов действуют по следующему правилу.
1. Если исходный сигнал D после смены состояния снова изменяется в течение заданного минимального времени TM≥2·Т, то при повторной смене состояния один из частичных сигналов DI и DQ изменяет свое значение, а именно тот частичный сигнал, который при последней смене состояния исходного сигнала остался неизменным. В этом случае частичные сигналы изменяют, следовательно, попеременно свое значение.
2. Если исходный сигнал D после смены состояния не изменяется в течение заданного минимального времени TM, то при следующей смене состояния исходного сигнала всегда один и тот же частичный сигнал, например DQ, изменяет свое значение независимо от мгновенного состояния частичных сигналов DI, DQ и независимо оттого, какой из частичных сигналов изменился при последней смене состояния.
Правило 1 гарантирует, что максимальная скорость передачи данных частичными сигналами DI,DQ будет составлять самое большее по одной половине скорости передачи данных исходным сигналом D. Правило 2 позволяет синхронизировать передающее и приемное устройства, как это поясняется в нижеследующем описании, без превышения скорости передачи данных частичными сигналами половины максимальной скорости 1/Т передачи данных исходным сигналом D.
В передающем устройстве частичные сигналы DI, DQ используют для вырабатывания передаваемого сигнала s с несущей круговой частотой ω, причем

В комплексной записи уравнение приобретает следующий вид:

т.е. частичные сигналы DI, DQ соответствуют реальной и мнимой частям комплексного сигнала.
Метод модуляции может быть изображен иным образом также посредством состояний в комплексной плоскости. При таком подходе передаваемый сигнал s по уравнению (2) может принимать четыре состояния Р0, Р1, Р2, Р3, как они показаны на фиг.2, которые имеют фазы π/4, 3π/4, 5π/4, 7π/4. При каждой смене состояния исходного сигнала передаваемый сигнал s переходит из соответствующего состояния Рi в одно из соседних состояний Р(i-1)mod 4 или Р(i-1)mod 4 в соответствии с одной из показанных на фиг.1 последовательностей 1 или 2 прохождения. Последовательность прохождения устанавливают на основе правила 2, если исходный сигнал D после смены состояния не изменяется в течение заданного минимального времени ТM: если мгновенное значение исходного сигнала D составляет 0, то выбирают последовательность 2 прохождения против часовой стрелки, а если значение составляет 1, то выбирают последовательность 1 прохождения по часовой стрелке
На фиг.3 и 4 изображено передающее устройство для вырабатывания передаваемого сигнала. Элемент 10 задержки и вентиль 11 исключающее ИЛИ вырабатывают из фронтов исходного сигнала D короткие импульсы длиной τ≪Т. Элемент 12 выдержки времени активирует свой выход каждый раз, когда временное расстояние между двумя следующими друг за другом импульсами больше ТM. Поскольку выходной сигнал элемента 12 выдержки времени связан с тактовым входом триггера 13, а вход данных этого триггера 13 связан с задержанным на величину τ сигналом D данных, триггер 13 запоминает значение исходного сигнала D, если он в течение отрезка времени ТМ не изменился. Запомненный в триггере 13 сигнал задает временную последовательность частичных сигналов DI, DQ, запомненных в триггерах 14, 15. Совместное включение триггеров 14, 15 с вентилями 16, 17 исключающее ИЛИ приводит к тому, что характеристика DQ повторяет сигнал DI, когда активен Q - выход триггера 13. Когда Q - выход триггера 13 неактивен, характеристика D1 повторяет сигнал DQ.
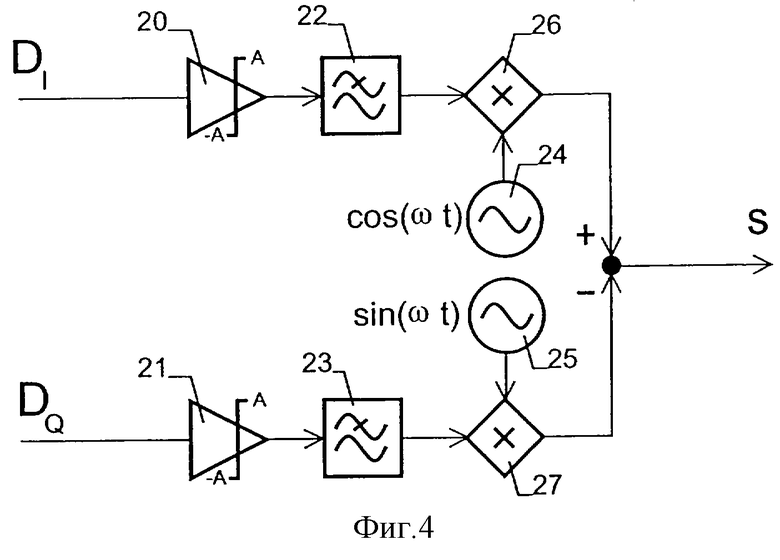
Передаваемый сигнал s(t) может быть выработан из частичных сигналов DI, DQ, как показано на фиг.4: два преобразователя 20, 21 конвертируют логические сигналы со значениями 1 и 0 в аналоговые сигналы с амплитудами А и -А, ширина полос которых ограничена фильтрами 22, 23 нижних частот. Передаваемый сигнал s(t) возникает за счет наложения ограниченных по ширине полос сигналов после их модулирования в модуляторах 26, 27 сигналами cos(ωt) и sin(ωt) несущей частоты, выработанными в генераторах 24, 25. Передаваемый сигнал s(t) при передаче по каналу передачи задерживают, искажают, и в таком виде он достигает приемного устройства в виде переданного сигнала r(t).
Ниже с помощью фиг.5 и 6 поясняется, как в приемном устройстве из принятого переданного сигнала r(t) можно получить принятый сигнал Е данных, причем Е должен идеально точно соответствовать переданному сигналу D данных за исключением задержки по времени, вызванной каналом передачи и обработкой сигнала в передающем и приемном устройствах. Для пояснения на фиг.7 изображены характеристики важнейших сигналов в приемном устройстве.
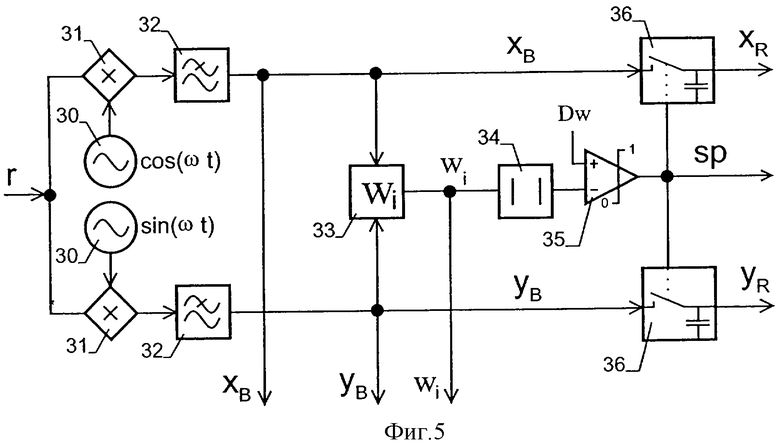
Исходя из переданного сигнала r(t) на фиг.4 посредством генераторов 30 несущей частоты и модуляторов 31 из принятого сигнала удаляют несущую частоту ω. Сигнал хB, уB в исходной полосе или мгновенное положение по фазе получают путем ограничения полосы двумя фильтрами 32 нижних частот. Следующий блок 33 вырабатывает мгновенную частоту wi(t) сигнала в исходной полосе, например, по формуле

Генератор 34 абсолютного значения определяет абсолютное значение мгновенной частоты |wi|, которую в компараторе 35 сравнивают с пороговым значением Δw≪1/Т. Посредством ЗУ 36 выборки и хранения сигнал хB, уB в исходной полосе дискретизируют, пока |wi|<Δw. Если |wi| превышает пороговое значение Δw, то дискретизованное значение хранят в ЗУ 36, где оно имеется в распоряжении для дальнейших этапов обработки в приемном устройстве в качестве опорного сигнала xR, уR.
В противоположность обычным методам синхронизации фаз вырабатывание хR, уR не требует длительных последовательностей синхронизации и, тем самым, особенно пригоден для многоточечного режима.
На фиг.6 показано, как из сигнала хВ, уВ в исходной полосе, опорного сигнала хR, уR, дискретизованного контрольного сигнала sp и мгновенной частоты wi можно получить принятый сигнал Е данных. В вычислительном устройстве 40 фазу сигнала в исходной полосе корректируют относительно опорного сигнала, причем корректированный по фазе сигнал х, у вычисляют по формулам:
x=хВ·хR+уВ·уR
у=уВ·хR+хВ·уR
В генераторах 41,42 абсолютных значений образуют абсолютные значения |х|, |у| корректированного по фазе сигнала и сравнивают между собой в компараторе 43. В моменты |х|=|у| фаза arctan (у/х) проходит через одно из значений ±π/4 или ±3π/4, а образованный компаратором 43 опорный сигнал изменяет свое состояние, т.е. угол между мгновенным фазовым значением или сигналом в основной полосе и опорным сигналом сравнивают с пороговым значением ±π/4 или ±3π/4. (На практике осуществленную в компараторе 43 операцию сравнения снабжают гистерезисом, с тем чтобы сделать операцию более стойкой к помехам при передаче).
Смены состояния опорного сигнала преобразуют посредством элемента 44 задержки и вентиля 45 исключающее ИЛИ в короткие импульсы длиной τ≪Т, которые через вентиль 46 И подают на тактовый вход триггера 47 и вход элемента 48 выдержки времени. Пока импульсы разнесены по времени меньше, чем модифицированное минимальное время TM '>ТМ, выход элемента выдержки времени остается неактивным, а переключатель 49 установлен так, что вход данных и инвертированный выход данных триггера 47 соединены между собой, и, тем самым, триггер 47 при каждом импульсе изменяет свое состояние. Если же импульсы разнесены больше, чем минимальное время TM ', то выход элемента 48 выдержки времени изменяет свое состояние на активное, а переключатель 49 соединяет выход компаратора 50 со входом данных триггера 47, так что последний при следующем импульсе запоминает состояние выхода компаратора 50. Когда подают опорные сигналы хR, уR, т.е. пока активен сигнал sp, на выходе вентиля 45 могут возникнуть нежелательные импульсы в сигнале ср. В сигнале eq эти импульсы больше не возникают, поскольку их подавляют посредством инвертора 51 и вентиля 46 И.
В компараторе 50 мгновенную частоту wi сравнивают с 0. т.е. определяют знак wi. Принятый сигнал Е данных является выходным сигналом триггера 47 и соответствует, тем самым, знаку wi, когда импульс имеет временное расстояние, по меньшей мере, TM ' до его предшественника. Если расстояние меньше TM ', то сигнал данных изменяет свое состояние без учета полярности wi.
При установлении значения TM ' необходимо учитывать, что положения фронтов сигнала данных при нарушениях во время передачи смещаются по сравнению с ненарушенным случаем случайным образом. Пока эти смещения лежат согласно мнемоническому правилу в диапазоне от -0.3 до +0.3 Т, качество передачи можно считать достаточным. Временное расстояние между двумя фронтами передаваемого сигнала данных можно было бы увеличить или уменьшить за счет передачи на значение до 0.6 Т при достаточном качестве передачи, так что для TM ' следует выбирать значение, по меньшей мере. Тм+0.6Т.
В приемном устройстве на фиг.5 и 6 компоненты 30-32 образуют фазовый детектор для детектирования относительного мгновенного положения по фазе принятого переданного сигнала r(t). Компоненты 33-45 образуют детектор изменения для вырабатывания тактового сигнала при изменении положения по фазе при смене состояния переданного сигнала. Триггер 47 образует бистабильную схему для вырабатывания выходного сигнала Е с возможностью своего переключения фазовым детектором. Элемент 48 выдержки времени образует схему распознавания пребывания для вырабатывания синхронизирующего сигнала, когда с последнего изменения положения по фазе прошло время, превышающее модифицированное минимальное время TM '. Компоненты 49, 50 образуют синхронизирующую схему, которая устанавливает или сбрасывает бистабильную схему при наличии синхронизирующего сигнала при следующем тактовом сигнале в соответствии с правилом 2.
Ниже поясняются общие положения описанного выше метода.
В поясненном выше методе передаваемый сигнал имел четыре возможных состояния Р0, Р1, Р2, Р3, как это показано на фиг.2. с фазами π/4, 3π/4, 5π/4, 7π/4. При этом следует учесть, что у фаз речь всегда идет о значениях относительно произвольно взятого нулевого положения, поскольку осцилляторы передающего и приемного устройств работают не синфазно, а фазу Р0 состояния можно определить, например, как 0. На фиг.2 состояние Рi может быть также придано фазе πi/2. В нижеследующих описании и формуле изобретения ко всем положениям по фазе можно прибавить произвольную постоянную (например, π/4), не выходя за рамки идеи изобретения
В принципе, данный метод может быть осуществлен и тогда, когда для передаваемого сигнала предусматривают только три возможных состояния или же более четырех возможных состоянии. Если предусматривают n состояний P0-Pn-1, то они имеют преимущественно фазы 0, 2·pi/n, 4·pi/n,...(n-1)·2·pi/n. На фиг.8 показаны соответствующие состояния для n=8.
Можно также расположить состояния иным образом, нежели по кругу, т.е. они могут дополнительно отличаться также, например, своими амплитудами. Правда, тогда со стороны приема требуется соответственно точное регулирование амплитуды, которая в многоточечном режиме должна иметь очень короткое время установления.
Чем выше число n, тем больше может быть ширина полосы переданного сигнала, причем, однако, отношение сигнал/шум ухудшается.
На фиг.8 изображены две предпочтительные последовательности 1 и 2 прохождения, в соответствии с которыми после состояния Рi возникает состояние Р(i-1)mod n или Р(i-1)mod n. У этих последовательностей прохождения смена фаз между следующими друг за другом состояниями и, тем самым, использованная ширина полосы минимальны.
В приведенном выше описании синхронизацию приемного устройства достигали за счет того, что при более длительном постоянстве исходного сигнала используемую ниже последовательность прохождения выбирали в зависимости от мгновенного значения исходного сигнала. Можно, однако, применять и другое правило. В частности, если исходный сигнал в течение минимального времени не изменяет своего состояния, можно, например, применить одно из следующих правил.
А. Если значение исходного сигнала 0, то мгновенная последовательность прохождения сохраняется, в противном случае она становится обратной. Равным образом, если значение исходного сигнала 1, то мгновенная последовательность прохождения сохраняется, в противном случае она становится обратной.
Б. Если значение исходного сигнала 0, то выбирают последовательность 1 прохождения, в противном случае - последовательность 2 прохождения (см. пример выполнения выше) Равным образом, если значение исходного сигнала 1, то выбирают последовательность 1 прохождения, в противном случае - последовательность 2 прохождения
В. Если значение исходного сигнала 0, то при следующей смене исходного сигнала выбирают следующее состояние согласно последовательности прохождения, в противном случае - состояние через одно (или наоборот). В этом случае последовательность прохождения всегда остается одинаковой.
Г. Если значение исходного сигнала 0, то один раз при следующей смене исходного сигнала выбирают следующее состояние согласно последовательности прохождения, в противном случае - предыдущее (или наоборот). Также в этом случае последовательность прохождения всегда остается одинаковой.
Во всех случаях приемное устройство может установить, каким было значение исходного сигнала, и, тем самым, осуществить синхронизацию. Эта синхронизация происходит при первой смене исходного сигнала после постоянной фазы, длящейся, по меньшей мере, в течение времени ТМ, поскольку в этот момент в распоряжении имеется дополнительная ширина полосы для передачи синхронизирующей информации.
В вариантах А, Б и Г, если исходный сигнал не изменяет состояния, по меньшей мере, в течение времени ТМ, а переданный сигнал находится в состоянии Рi, при следующей смене выбирают либо предыдущее состояние Р(i-1)mod n или следующее состояние Р(i-1)mod n, а именно в зависимости от мгновенного значения исходного сигнала D.
Для сигналов, которые очень долго не изменяют своего значения, этот метод приводит к тому, что синхронизация, которая может происходить только при смене исходного сигнала, происходит при определенных обстоятельствах относительно поздно. Для того чтобы учитывать такие случаи, синхронизирующая информация может быть дополнительно передана, например, по отдельному каналу передачи данных. Возможно также для синхронизации передающего и приемного устройств при постоянном значении исходного сигнала дополнительно осуществление амплитудной модуляции переданного сигнала в зависимости от значения исходного сигнала. Так, например, переданный сигнал с частотой, намного меньшей, чем 1/Т, может быть модулирован с небольшой амплитудой, в случае если значение исходного сигнала 1, тогда как амплитудной модуляции не происходит (или происходит амплитудная модуляция при другой частоте), когда исходный сигнал 0. В приемном устройстве может быть предусмотрен соответствующий детектор, который при более длительном постоянстве исходного сигнала детектирует амплитудную модуляцию и синхронизирует приемное устройство. Поскольку амплитудная модуляция происходит с частотой намного меньше 1/Т, ширина полосы переданного сигнала не увеличивается недопустимо.
В описанных примерах выполнения были изображены передающее и приемное устройства, состоящие из дискретных функциональных блоков. Они могут быть, однако, реализованы иным образом, в частности в виде управляемых программой цифровых схем обработки сигналов, причем изображенные на фиг.3-6 функциональные блоки реализуют преимущественно в виде соответствующих функциональных частей компьютерной программы.




Изобретение относится к системе радиосвязи и предназначено для передачи и приема двоичного сигнала, т.е. сигнала, имеющего два возможных состояния, в частности анизохронного сигнала. Технический результат - повышение пропускной способности. Для передачи анизохронного двоичного исходного сигнала используют фазовую модуляцию, при которой переданный сигнал может иметь четыре разнофазных состояния (Р0, P1, P2, Р3). При каждой смене исходного сигнала переданный сигнал изменяет состояние в соответствии с одной из двух возможных последовательностей (1, 2) прохождения на следующее или предыдущее. Если исходный сигнал в течение заданного времени не изменяется, то при следующей смене последовательность прохождения выбирают в соответствии с мгновенным значением исходного сигнала, так что приемное устройство может определить это мгновенное значение для синхронизации. Способ повышает эффективность ширины полосы передачи. 2 н. и 9 з.п. ф-лы, 8 ил.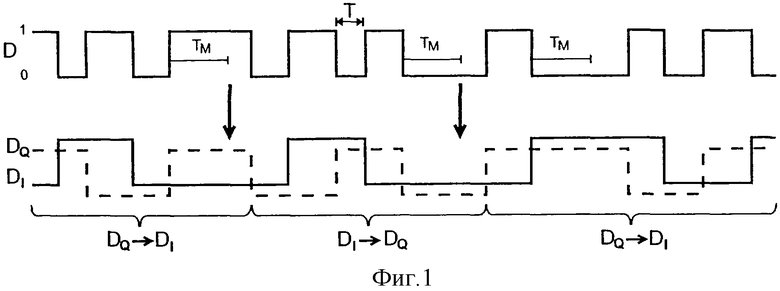
| US 5592518, А, 07.01.1997 | |||
| УСТРОЙСТВО УПРАВЛЕНИЯ ПЕРЕДАЧЕЙ ДАННЫХ ПО РАДИОКАНАЛУ | 1999 |
|
RU2168870C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПЕРЕДАЧЕЙ ПАКЕТНОЙ ИНФОРМАЦИИ ПО РАДИОКАНАЛУ | 1999 |
|
RU2168282C1 |
| US 5574753, А, 12.11.1996 | |||
| GB 1425967, А, 18.02.1976. | |||

