Изобретение относится к железнодорожной технике, а именно к железнодорожной автоматике и телемеханике, и может быть использовано для регулирования движения поездов.
Известен способ контроля свободности рельсовой линии, заключающийся в том, что определяют количество свободных путевых участков на перегоне и сумму значений напряжений на этих же участках, а затем находят среднее арифметическое значение напряжений. Текущее значение каждого из участков сравнивают со средним арифметическим значением. При существенном отличии текущего значения от среднего арифметического фиксируют занятость путевого участка, в противном случае - свободность [Патент РФ №2025358, МПК B61L 23/16. Способ контроля свободности путевых участков и устройство для его осуществления. Авторы: Полевой Ю.И., Стрельцов С.К., Мазалова И.В., Кравцова Н.А. БИ №24, 1994 г.].
Недостатком этого способа является то, что при наличии значительной продольной асимметрии возможен ложный контроль состояния рельсовой линии.
Известен способ контроля свободности рельсовой линии, заключающийся в том, что значение текущего напряжения на приемнике сравнивают с пороговым значением напряжения. При превышении текущего напряжения над пороговым значением фиксируют свободность рельсовой линии, в противном случае - занятость [Котляренко Н.Ф. Путевая блокировка и авторегулировка. - М.: Транспорт, 1983 г.]. Данное техническое решение выбрано в качестве прототипа.
Недостатком этого способа является то, что при пониженном сопротивлении изоляции возможен ложный контроль состояния рельсовой линии.
Техническим результатом является повышение надежности контроля состояния рельсовой линии.
Технический результат достигается тем, что способ контроля состояния рельсовой линии, заключающийся в том, что путевой генератор и приемник поочередно подключают к каждой рельсовой линии перегона и регистрируют токи приемного и питающего концов каждой рельсовой линии, причем определяют среднеарифметическое значение токов питающего и приемного концов и сравнивают его с пороговым значением, за которое принимают среднеарифметическое значение тока питающего и приемного концов при свободной рельсовой линии, затем фиксируют состояние половины рельсовой линии со стороны приемного конца, меняют местами питающий и приемный концы и повторяют операцию, занятость рельсовой линии фиксируют при отличии среднеарифметического значения токов питающего и приемного концов от порогового значения более чем на 50%, а свободность - менее чем на 25%.
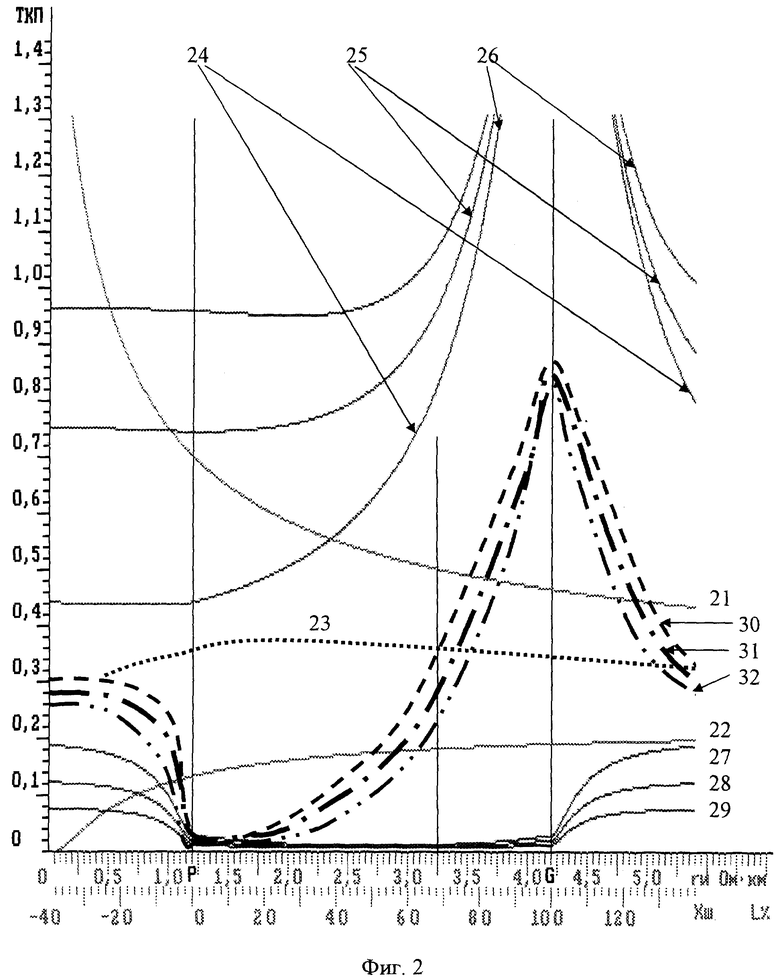
На фиг.1 приведена схема рельсовой линии, реализующей предлагаемый способ. На фиг.2 приведены графики зависимостей токов приемного и питающего концов и их среднеарифметических значений от сопротивления изоляции и координат шунтов.
На фиг.1 представлена рельсовая линия, реализующая предлагаемый способ контроля свободности рельсовой линии, которая содержит следующие элементы: путевой генератор ПГ 1, ограничивающий резистор 2, переключающее устройство 3, резисторы 4, 5 и 6, согласующие трансформаторы 7, 8 и 9, рельсовые линии 10, 11, 12 и 13, первый полосовой фильтр 14, первый выпрямительный мост 15, первый аналого-цифровой преобразователь (АЦП) 16, электронно-вычислительную машину (ЭВМ) 17, второй полосовой фильтр 18, второй выпрямительный мост 19 и второй АЦП 20.
На фиг.2 приведены зависимости токов питающего и приемного концов от сопротивления изоляции при свободной рельсовой линии - кривые 21 и 22, среднее арифметическое значение упомянутых токов - кривая 23. Кривые 24, 25 и 26 представляют зависимости тока питающего конца от координаты шунта при сопротивлениях изоляции соответственно 5, 1 и 0,5 Ом·км. Кривые 27, 28 и 29 представляют зависимости тока приемного конца от координаты шунта при сопротивлениях изоляции соответственно 5, 1 и 0,5 Ом·км. Кривые 30, 31 и 32 соответствуют среднеарифметическим значения кривых 24 и 27, 25 и 28, 26 и 29 соответственно. По вертикальной оси отложены значения токов (ТКП), по горизонтальной оси две шкалы: сопротивления изоляции от 0 до 6 Ом·км и координаты шунтов в процентах от длины рельсовой линии между приемником Р и генератором G. Из графиков видно, что кривые 30, 31 и 32 при расположении шунта между приемником и серединой рельсовой линии (координата 0 и 50) проходят значительно ниже линии 23, что соответствует занятому состоянию рельсовой линии (занятие контролируется достоверно).
При переключении питающего и приемного концов аналогичная ситуация сложится с другой стороны рельсовой линии.
Исследования показали, что достоверный контроль состояния рельсовой линии возможен при снижении сопротивления изоляции до 0,3 Ом·км.
Приборы рельсовой цепи (фиг.1) соединены следующим образом. К выходу путевого генератора (ПГ) 1 через ограничивающий резистор (R0) 2 подсоединен первый вход (ВХ1) переключающего устройства 3, к линейным входам ВЛ1, ВЛ2 и ВЛ3 этого устройства через резисторы 4, 5 и 6, трансформаторы 7, 8 и 9 подключены рельсовые линии 10, 11, 12 и 13. Ко второму входу переключающего устройство 3 подсоединен первый выход ЭВМ 17, а к выходу переключающего устройства 3 через первый полосовой фильтр 14, первый выпрямительный мост 15 и первый АЦП 16 - первый вход ЭВМ 17. Ко второму входу ЭВМ 17 подключены полюсы ограничивающего резистора 2 через второй полосовой фильтр 18, второй выпрямительный элемент 19 и второй АЦП 20. Ко второму выходу ЭВМ 17 подключены приборы управления стрелками и сигналами на станции и перегоне.
Работа устройства происходит следующим образом. Переключающее устройство 3 поочередно подключает к каждой рельсовой линии генератор 1 и ЭВМ 17. ЭВМ 17 посредством первого выхода (ВЫХ1) регулирует процесс переключения рельсовых линий 10, 11, 12 и 13. Информация о напряжении приемного конца каждой рельсовой линии поступает через согласующие трансформаторы 7, 8, 9, резисторы 4, 5, 6, первый полосовой фильтр 14, первый выпрямительный мост 15 и первый АЦП 16 на первый вход ЭВМ 17 (ВХ1). Информация о токе питающего конца поступает в виде значения падения напряжения на ограничивающем резисторе 2 через второй полосовой фильтр 18, второй выпрямительный элемент 19 и второй АЦП 20 на второй вход ЭВМ 17 (ВХ2).
Алгоритм занятия рельсовой линии можно пояснить по фиг.2. При снижении текущего среднеарифметического значения токов питающего и приемного концов (кривые 30, 31, 32) ниже 50% (половины) значения среднеарифметического значения токов питающего и приемного концов при свободной рельсовой линии (пороговое значение), которое определяется линией 23 (минимальное значение - левый край линии), фиксируют занятие половины рельсовой линии, если это же текущее значение отличается от порогового (минимальное значение - левый край линии) менее чем на 25%, то фиксируют освобождение. Для контроля состояния правой половины рельсовой линии необходимо изменить расположение питающего и приемного концов и повторить операцию.
Использование предлагаемого способа позволит повысить надежность контроля состояния рельсовой линии при пониженном сопротивлении изоляции.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ СВОБОДНОСТИ РЕЛЬСОВОЙ ЛИНИИ | 2007 |
|
RU2362699C1 |
| СПОСОБ КОНТРОЛЯ СВОБОДНОСТИ ПУТЕВЫХ УЧАСТКОВ | 2004 |
|
RU2271949C2 |
| СПОСОБ КОНТРОЛЯ СВОБОДНОСТИ РЕЛЬСОВОЙ ЛИНИИ | 2008 |
|
RU2361765C1 |
| СПОСОБ КОНТРОЛЯ ЗАНЯТИЯ РЕЛЬСОВОЙ ЛИНИИ | 2004 |
|
RU2278045C2 |
| СПОСОБ КОНТРОЛЯ СВОБОДНОСТИ РЕЛЬСОВОЙ ЛИНИИ | 2004 |
|
RU2273583C2 |
| СПОСОБ КОНТРОЛЯ СВОБОДНОСТИ ПУТЕВЫХ УЧАСТКОВ | 2004 |
|
RU2267431C2 |
| СПОСОБ КОНТРОЛЯ СВОБОДНОСТИ РЕЛЬСОВОЙ ЛИНИИ | 2004 |
|
RU2273582C2 |
| СПОСОБ КОНТРОЛЯ СВОБОДНОСТИ ПУТЕВЫХ УЧАСТКОВ | 2004 |
|
RU2271952C2 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВОЙ ЛИНИИ | 2010 |
|
RU2423268C1 |
| СПОСОБ КОНТРОЛЯ РЕЛЬСОВОЙ ЛИНИИ | 2004 |
|
RU2278044C2 |
Изобретение относится к железнодорожной технике, а именно к железнодорожной автоматике и телемеханике для интервального регулирования движения поездов. Способ заключается в том, что путевой генератор и приемник поочередно подключают к каждой рельсовой линии перегона и регистрируют токи приемного и питающего концов каждой рельсовой линии. Определяют среднеарифметическое значение токов питающего и приемного концов и сравнивают его с пороговым значением, за которое принимают среднеарифметическое значение тока питающего и приемного концов при свободной рельсовой линии. Затем фиксируют состояние половины рельсовой линии со стороны приемного конца, меняют местами питающий и приемный концы и повторяют операцию. Занятость рельсовой линии фиксируют при отличии среднеарифметического значения токов питающего и приемного концов от порогового значения более чем на 50%, а свободность - менее чем на 25%. Использование предлагаемого способа позволит повысить надежность контроля состояния рельсовой линии при пониженном сопротивлении изоляции. 2 ил.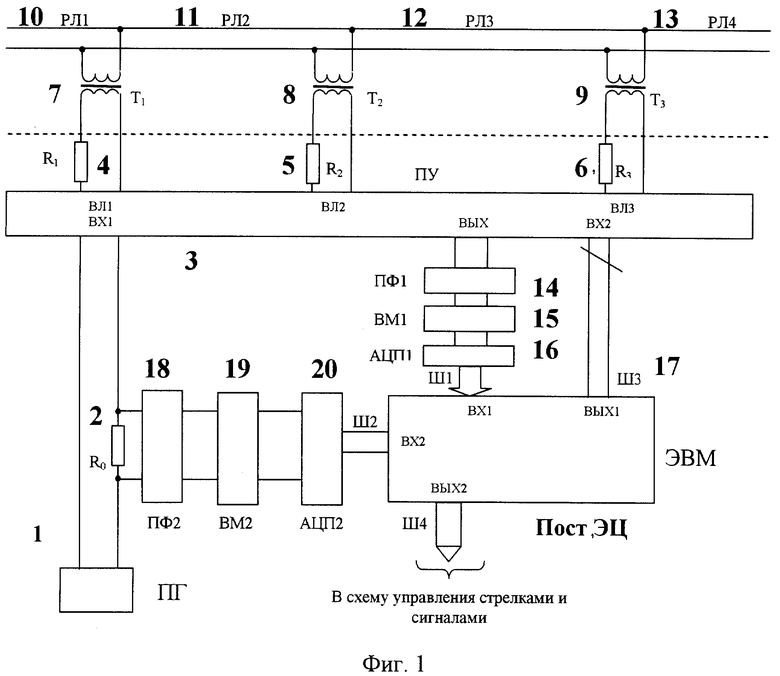
Способ контроля состояния рельсовой линии, заключающийся в том, что путевой генератор и приемник поочередно подключают к каждой рельсовой линии перегона и регистрируют токи приемного и питающего концов каждой рельсовой линии, отличающийся тем, что определяют среднеарифметическое значение токов питающего и приемного концов и сравнивают его с пороговым значением, за которое принимают среднеарифметическое значение тока питающего и приемного концов при свободной рельсовой линии, затем фиксируют состояние половины рельсовой линии со стороны приемного конца, меняют местами питающий и приемный концы и повторяют операцию, занятость рельсовой линии фиксируют при отличии среднеарифметического значения токов питающего и приемного концов от порогового значения более чем на 50%, а свободность - менее чем на 25%.
| КОТЛЯРЕНКО Н.Ф | |||
| Путевая блокировка и авторегулировка | |||
| - М.: Транспорт, 1983 | |||
| Рельсовая цепь | 1991 |
|
SU1799784A1 |
| СПОСОБ КОНТРОЛЯ СВОБОДНОСТИ ПУТЕВЫХ УЧАСТКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2025358C1 |
| СПОСОБ КОНТРОЛЯ СВОБОДНОГО СОСТОЯНИЯ РЕЛЬСОВОЙ ЛИНИИ | 2000 |
|
RU2185300C2 |

