Изобретение относится к технический средствам, позволяющим людям подобно птицам летать по воздуху с помощью мускульной силы.
Известно изобретение (пат. СССР 1205, кл. 62 В, заявлено 1920 г. "Планера Онитоптера"), в котором для увеличения длительности полета планера предусмотрено устройство для махания крыльями с помощью силы ног, помещенных в стремена.
Основной недостаток известного устройства состоит в том, что оно не использует силу рук и не позволяет самостоятельно оторваться от земли.
Изобретение состоит из носилок и симметричных крыльев. Полет пилота на мускулолете осуществляется за счет перемещения крыльев в двух плоскостях, приводимых в движение силой ног и рук.
Мускулолет снабжен подвижными стержнями, корпус выполнен из двух параллельных труб, образующих неподвижные части носилок, упомянутые стержни вывешены на подшипниках и расположены внутри упомянутых труб, которые выполнены с прорезями для крепления с крыльями, атакующие части которых соединены с неподвижной частью носилок.
Крылья, стремена для ног и поручни для рук крепятся к подвижным стержням носилок. Пилот закрепляется на носилках, вставляет ноги в стремена, а руками берется за поручни и заставляет стержень, а соответственно крылья совершать поступательные движения. Крылья, опираясь на воздух, поднимают и толкают носилки с пилотом вперед, и, кроме того, трос, соединенный с атакующей частью крыла и неподвижной частью носилок, деформирует крыло и создает гребковое движение и по окончании гребка возвращает крыло в исходное положение.
Основное уравнение сил полета мускулолета
где F - сила пилота; ρ - плотность воздуха; V - скорость движения крыла; ρSкрV2 - подъемная сила крыла, ρSлобV2 - толкающаяся сила крыла.
При равных подъемной и толкающей силах крыла скорость горизонтального полета мускулолета (Vп.м) будет обратно пропорциональна площади крыла Sкр и площади лобового сопротивления Sлоб, то есть
Vп.м≈(Sкр/Sлоб)V
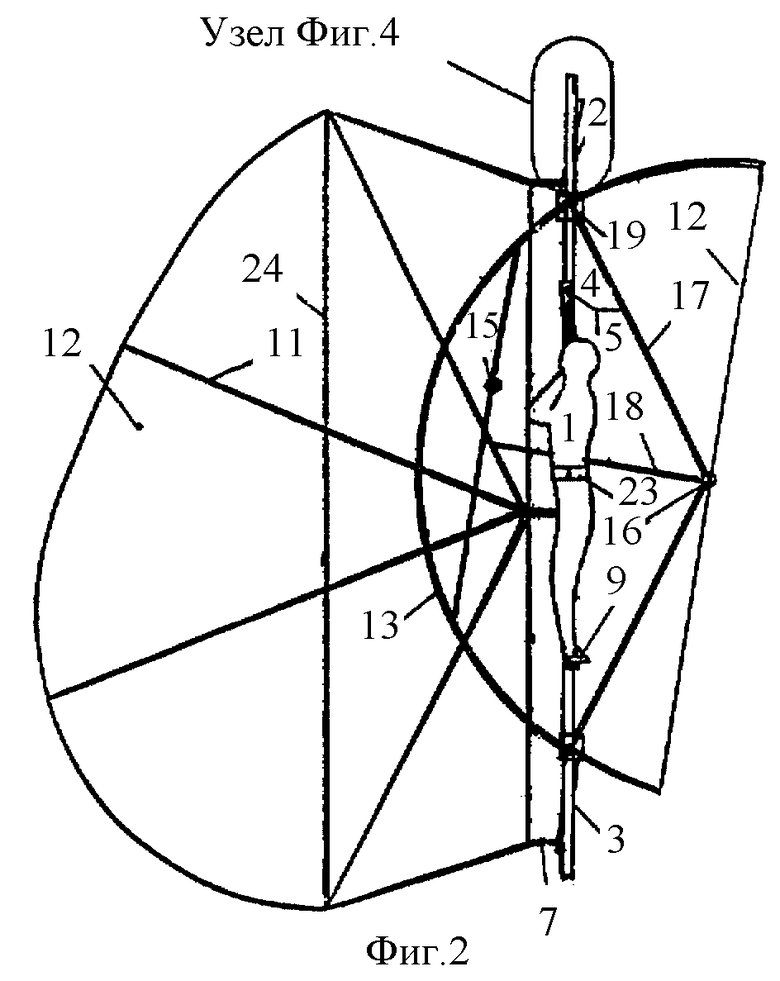
На фиг. 1 - 3 показан мускулолет в трех видах, когда он находится в полете, и его крылья находятся в нижнем положении, и крыло деформировано под действием натяга троса. На фиг. 4 показан узел повторяющихся элементов. На фиг. 1 показан мускулолет (вид сверху), где показан пилот 1, лежащий на носилках 2, которые состоят из двух параллельных труб 3 с прорезями 4 и окаймляющих их обойм 5 (опоры силовых деталей), внутри расположены стержни 6 (см. фиг.4), в которые вделаны трубки флоры 7 с подшипниками 8 (см. фиг.4), к которым прикреплены стремена 9, поручни 10 и стрингеры 11. Стрингеры 11 обтянуты сеткой с лентами (жалюзи) и образуют крыло 12. На фиг. 3 показаны полуколеса 13, которыми служат шасси и крепления установки на их концах третьего крыла 14, служащего элероном, а ручки 15 - его управлением. В центре тяжести мускулолета устанавливается ось 16 полуколес и удерживающие их тяги 17, упоры 18, направляющие шайбы 19. 20 - трос, 21, 22 - места его крепления. Пояс 23, связывающий пилота с носилками 2, установлен в центре тяжести мускулолета; 24 - шпангоуты. Пунктирной линией показаны детали мускулолета, когда крылья находятся в переднем положении.
На фиг.2 показан мускулолет, вид сбоку;
на фиг.3 - то же, вид сзади;
на Фиг.4 показан повторяющийся узел, повернутый на 90o.
Принцип действия мускулолета
Мускулолет устанавливается против ветра. Пилот 1 ложится на носилки 2, жестко скрепляет себя с носилками с помощью пояса 23, вставляет ноги в стремена 9, берется руками за поручни 10 и выводит крылья 12 в верхнее положение. При этом стержень 6 передвигается и поворачивается в трубе 3 на подшипниках 8 в обоймах 5.
Элерон 14 устанавливается в оптимальное положение подъема с помощью ручек 15 и затем редким движением ног и рук старается передвинуть крылья 12 в нижнее положение, при этом трос 20 натягивается, крылья деформируются и производят дополнительный мах, а мускулолет как бабочка срывается с места и летит. Когда крылья 12 мускулолета находятся в нижнем положении, пилот 1 освобождает натяг троса 20 и прилагает усилие на возврат крыльев в верхнее положение. При перемещении крыла назад и вниз жалюзи автоматически приоткрываются, что позволяет крылу 12 делать большее сцепление с воздухом и эффективнее отталкиваться, а при перемещении крыла вперед и вверх жалюзи приоткрываются и воздух, проходя через наклонные жалюзи, производит дополнительно толкающую силу крылу вперед и вверх.
После набора высоты мускулолет продолжает горизонтальный полет, увеличивая скорость полета, для чего пилот переводит элерон 14 в горизонтальное положение. Этот цикл повторяется до набора нужной высоты. Наклоном крыльев пилот выбирает направление полета.
Снижение начинается с парящего полета, снижения скорости и перевода элерона 14 в положение отрицательного угла, а затем перевода элерона 14 в положение подъема-тормоза, что ведет к спуску мускулолета на землю.


Изобретение относится к испытательным аппаратам орнитоптерам. Мускулолет содержит носилки, на которых лежит пилот, и крылья. Носилки состоят из двух труб с прорезами, внутри которых расположены стержни, к которым прикреплены крылья с элеронами, стремена для ног и ручки для рук. Каждый стержень совершает поступательно-возвратное движение с поворотом, а крылья - махательно-поступательные движения. Изобретение направлено на повышение эффективности использования мускульной силы человека. 4 ил.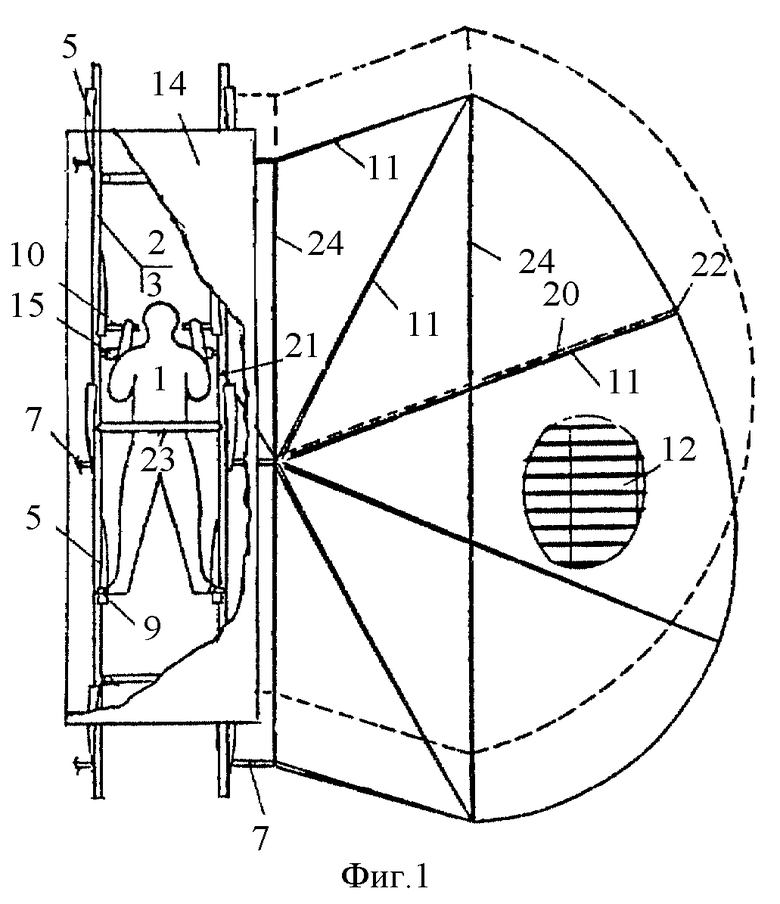
Самолет с машущими крыльями, содержащий корпус для размещения пилота, машущие крылья, стремена для ног и ручки для рук, предназначенные для привода упомянутых крыльев, отличающийся тем, что он снабжен подвижными стержнями, корпус выполнен из двух параллельных труб, образующих неподвижные части носилок, упомянутые стержни являются подвижной частью носилок и расположены внутри упомянутых труб, которые выполнены с прорезями для скрепления с крыльями, атакующие части которых соединены с неподвижной частью носилок.
| ПЛАНЕР - ОРНИТОПТЕР | 1920 |
|
SU1205A1 |
| УСТРОЙСТВО ПРЕДПУСКОВОГО ПРОГРЕВА ПРИВОДА ЗЕМЛЕРОЙНО-СТРОИТЕЛЬНОЙ МАШИНЫ | 1994 |
|
RU2077639C1 |
| Устройство для тренировки пловцов | 1980 |
|
SU942781A1 |

