Изобретение относится к воздухоплаванию и может быть использовано для аварийной посадки пассажирских авиалайнеров и в спортивной авиации при разработке и пилотировании дельтапланов, планеров и парапланов.
Известен способ осуществления полета по патенту РФ №2111149, МПК6 B64C 31/02, заключающийся в колебаниях физического тела и его аэродинамической поверхности относительно друг друга, воздушного пространства и гравитационного поля Земли в режиме энергетического резонанса, при котором для обеспечения непрерывности периодических процессов изменения силы взаимодействия между физическим телом (ФТ) и аэродинамической поверхностью в каждом периоде на ФТ воздействуют импульсом силы Fи одинакового направления с движением ФТ и такой величины, чтобы выполнялось условие V2≥V1. В известном способе используется явление резонанса, а движение в режиме резонанса является одним из самых энергетически экономных процессов.
Способ демонстрирует преимущества резонансных колебаний твердого тела, упруго подвешенного в воздушной среде, но не позволяет использовать его для самолетов, планеров и т.п. летательных аппаратов, в которых нет взаимных колебаний тела и аэродинамической поверхности.
Для осуществления способа используется аэродинамическая поверхность, характеризующаяся отсутствием конструктивного единства и жесткости летательного аппарата, что требует общего изменения конструкции существующих самолетов и планеров. Используемая конструкция не гарантирует их безопасную посадку на площади ограниченных размеров и не защищает от сваливания в штопор на малых скоростях и критических углах атаки аэродинамической поверхности летательного аппарата.
Известны летательные аппараты с аэродинамическими поверхностями, выполненными по компоновочной схеме "утка" с центром аэродинамических сил, расположенным впереди центра тяжести летательного аппарата.
В частности, известен самолет короткого взлета и посадки по схеме «утка» по патенту РФ № 2103199, содержащий фюзеляж, консоли крыла, систему отклонения вектора тяги двигателей, выдвижные вспомогательные высоконесущие аэродинамические поверхности, расположенные впереди центра масс самолета с возможностью выдува сжатого воздуха на поверхности и с возможностью изменения угла их установки относительно продольной оси самолета. Уменьшение длины разбега и пробега оценивается в 2-4 раза при одновременном действии подъемной силы от крыла, вспомогательных поверхностей и вертикальной составляющей тяги двигателя.
Указанный самолет осуществляет полет и обеспечивает летные характеристики только при работающих двигателях, а в аварийном режиме при отказе двигателей конструкция неработоспособна, а его вспомогательные поверхности впереди центра масс не выполняют свои функции.
Задача предлагаемого изобретения заключается в разработке беспилотной аварийной посадки самолетов с неработающими двигателями на площадку небольшого размера значительно меньшей обычной взлетно-посадочной полосы, которая обеспечивала бы сохранность жизни пилотов и пассажиров даже при поломке шасси и деформации нижней части фюзеляжа.
Эта задача решается предложенными способом и летательным аппаратом для его осуществления.
Способ планирующего полета летательного аппарата с аэродинамическими поверхностями, включающими крылья, хвостовой киль, стабилизатор, при котором осуществляют периодические колебания летательного аппарата в воздушном пространстве и гравитационном поле Земли, отличающийся тем, что аэродинамическая поверхность выполнена симметрично-обратимой в виде тандемной "утки" путем размещения в носовой части летательного аппарата дополнительного ∨-образного оперения с обеспечением отрицательной подъемной силы при движении летательного аппараты «хвостом вперед», при этом планирование характеризуется периодическими изменениями направления устойчивого движения летательного аппарата вперед-назад за счет использования сил и моментов инерции в режиме параметрического резонанса летательного аппарата как маятника с периодически опускаемой точкой подвеса по устойчивой, плоской зигзагообразной траектории, составленной из сопряженных отрезков волнообразной глиссады, параметры которой определяют по интегральным кривым на боковой части полной цилиндрической фазовой поверхности возможных состояний летательного аппарата, где они образуют замкнутый цикл, автоматически переходящий под влиянием экранного эффекта земной поверхности в замедленную вертикальную посадку летательного аппарата с критическими углами атаки его аэродинамической поверхности.
Также способ планирующего полета характеризуется тем, что для замедления спуска или зависания над посадочной площадкой периодически включают тягу и реверс двигателей синфазно с колебаниями летательного аппарата как маятника.
Летательный аппарат для осуществления способа включает фюзеляж, крылья, аэродинамические поверхности хвостового оперения, включающего киль и стабилизатор, а также дополнительное носовое оперение. Аэродинамическая поверхность в целом выполнена симметрично-обратимой в виде тандемной "утки" с центром аэродинамических сил, расположенным выше центра тяжести летательного аппарата традиционной компоновки путем выполнения дополнительного носового оперения ∨-образной формы, закрепленного на фюзеляже под таким же углом атаки, что и хвостовой стабилизатор, но с противоположным знаком относительно направления движения и с обеспечением отрицательной подъемной силы при движении хвостовым оперением вперед; при этом дополнительное носовое оперение снабжено торцевыми шайбами, которые выполнены с осью поворота, установленной по нормали к нижней поверхности дополнительного оперения.
Сопоставительный анализ предложенного способа планирующего полета с прототипом и классической задачей о планирующем полете показывает существование новой кусочно-ломанной глиссады снижения летательного аппарата с критическими углами атаки аэродинамической поверхности, создающей максимальную подъемную силу при минимальной скорости касания поверхности земли. Фактически это новая фигура высшего пилотажа, которую выполняет сам самолет без участия пилотов под влиянием полного решения нелинейного дифференциального уравнения планирования [Андронов А.А., Витт А.Н., Хайкин С.Э. Теория колебаний. - М.: Госиздат физико-математической литературы, 1959. - с.497-503].
Таким образом, в отличие от способа полета по патенту РФ 2111149 предложенный способ может быть применен как для летательных аппаратов со штатным движением в горизонтальном направлении и спускающихся по глиссаде с работающими двигателями, так и вертикально спускающихся летательных аппаратов без парашютных систем и несущих винтов. При этом простая и надежная конструкция дополнительного переднего оперения летательного аппарата не нарушает жесткости и единства всего летательного аппарата и может устанавливаться на существующих самолетах и вертолетах для повышения их безопасности и аварийной посадки в экстремальных условиях.
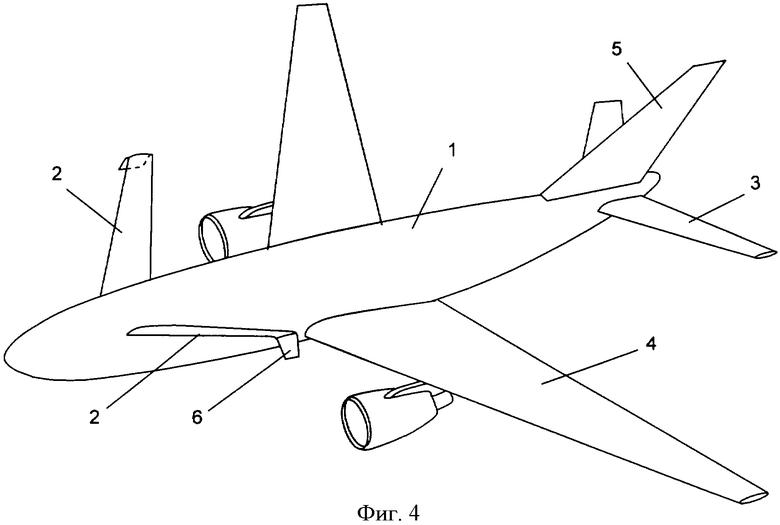
Сущность изобретения поясняется чертежом, где на фигуре 1 представлена схема и пространственная траектория движения летательного аппарата как маятника по предлагаемому способу; на фигуре 2 дана развертка цилиндрической фазовой поверхности с интегральными кривыми полного решения дифференциального уравнения планирующего полета; на фигуре 3 и 4 изображена модель самолета с предложенным дополнительным носовым оперением для реализации предложенного способа - вид спереди и изометрия.
Способ может быть осуществлен планерами, самолетами с выключенными двигателями в режиме планирующего полета на основе следующих физических принципов.
Ранее рассмотрены задачи устойчивого полета физического тела в воздухе под воздействием притяжения Земли и подъемной силы аэродинамической поверхности крыловидного профиля. Известно решение классической задачи Жуковского Н.Е. о планирующем полете (то есть с выключенными двигателями) летательного аппарата традиционной компоновки с хвостовым стабилизатором и крылом, расположенным за центром тяжести. В зависимости от начальных условий летательный аппарат может самостоятельно двигаться в вертикальной плоскости по траектории в виде "мертвой петли", переходящей в волнообразную, а затем в линейную глиссаду с определенным углом Θ0 и скоростью снижения V0 [Андронов А.А., Витт А.Н., Хайкин С.Э. Теория колебаний. - М.: Госиздат физико-математической литературы, 1959. - с.497-503]. Завершающая стадия такого планирующего полета осуществляется по линейной глиссаде вдоль длинной взлетно-посадочной полосы, которая даже с учетом влияния "экранного" эффекта поверхности Земли превышает сотни и тысячи метров. Однако линейная глиссада имеет склонность скручиваться в трехмерную спираль, то есть в неуправляемый "плоский" штопор, от которого пока не найдено надежное средство спасения. К сожалению, при решении своей задачи Жуковский Н.Е. сделал три недопустимых упрощения, на сто лет задержавших развитие авиации в направлении безопасности полетов. В частности, он пренебрег собственным моментом инерции планера относительно центра тяжести для обеспечения постоянства угла атаки аэродинамической поверхности и ее коэффициентов Сх и Су, а также принципиально исключил возможность полета "хвостом вперед", то есть движение назад по интегральным траекториям на нижнем полуцилиндре фазовой поверхности, которым соответствуют решения дифференциального уравнения планирования:

здесь: 


Θ - угол наклона траектории, V - скорость центра тяжести, m - масса планера, F - площадь его крыльев, Сх и Су - аэродинамические коэффициенты силы сопротивления и подъемной силы, g - ускорение силы тяжести, ρ - плотность воздуха.
Устойчивому решению уравнения (1) при сделанных Жуковским Н.Е. упрощениях соответствует лишь один фокус с параметрами Θ0 и y0 линейной глиссады на цилиндрической фазовой поверхности в области положительных значений у, то есть при полете вперед. Такое упрощенное решение задачи о планирующем полете не позволило обнаружить и исследовать другие режимы полета и фигуры высшего пилотажа.
Принимая во внимание собственный момент инерции планера относительно центра тяжести и возможность движения «хвостом вперед», заявители построили на всей цилиндрической фазовой поверхности полное семейство интегральных кривых с устойчивым циклом периодических колебательных движений летательного аппарата как маятника (фигура 2).
Кроме линейной глиссады возможен ее трехмерный вариант в виде цилиндрической спирали, соответствующий траектории ЛА в плоском штопоре. Поскольку штопор характеризуется большой величиной скорости вращения и бортового крена летательного аппарата, то он не пригоден для аварийной посадки, а поступательная скорость глиссады принципиально не имеет нулевых значений и критических углов атаки с максимально возможной подъемной силой, что не позволяет полностью использовать аэродинамические возможности современных самолетов, особенно пассажирских, которые летают в режиме максимальной экономии буквально на грани "энергетического фола". Поэтому поиск новых устойчивых траекторий планирования летательных аппаратов, обеспечивающих безопасную посадку на площадке гораздо меньших размеров, чем взлетно-посадочная полоса, является весьма актуальной задачей современной авиации.
Описание предложенного способа планирования и беспилотной посадки летательного аппарата дается на примере работы и движения летательного аппарата традиционной компоновки с предложенным дополнительным носовым оперением в виде тандемной "утки".
Летательный аппарат (фигуры 1 и 4) традиционной компоновки 1 содержит установленную в его передней носовой части дополнительную аэродинамическую поверхность в виде дополнительного носового оперения 2, которая закреплена на фюзеляже летательного аппарата под таким же углом атаки, что и хвостовой стабилизатор 3, но с противоположным знаком относительно направления движения. Это обеспечивает аэросимметричную схему «утка» как при движении вперед, так и назад. Основное крыло летательного аппарата 4 расположено на фюзеляже так, что общий центр аэродинамических сил находится выше центра тяжести на величину конструктивного эксцентриситета е (фигура 1) в вертикальной плоскости расположения киля 5. Для совмещения функций киля и стабилизатора дополнительное оперение тандемной "утки", то есть оперение «утка» спереди и сзади, целесообразно делать жесткой ∨-образной формы с торцевыми шайбами 6, закрепленными с возможностью поворота на осях, перпендикулярных нижним плоскостям ∨-образного оперения. Тогда можно воспользоваться общеизвестными выражениями для веса летательного аппарата mg, его подъемной силы Ру и силы лобового сопротивления Рх, которые находятся из поляры его аэродинамической поверхности.
Способ планирования летательного аппарата с предложенным устройством оперения по схеме тандемной "утки" для летательного аппарата осуществляется следующим образом.
При выключении двигателей летательного аппарата на достаточной высоте его полет происходит сначала по волнообразной глиссаде с возрастающим углом Θ и уменьшающейся скоростью V вплоть до прекращения горизонтального движения летательного аппарата. Устойчивость такого движения обеспечивается естественной противоштопорной защитой компоновочной схемы "утка", так как закритический срыв воздушного потока на относительно небольшом носовом оперении 2 с бóльшим первоначальным углом атаки происходит раньше, чем на основном крыле 4, создающим бóльшую часть подъемной силы, поэтому нос самолета в этом случае слегка опускается, и летательный аппарат возвращается в нормальный полет по волновой глиссаде без кувырка носом вперед, как это происходит по решению вышеупомянутой задачи Жуковского. Резкому опрокидыванию летательного аппарата носом вперед и вниз препятствует собственный момент инерции его конструкции, который делает более естественным и вероятным скатывание летательного аппарата назад с неизменным углом Θ по более низкому отрезку волнообразной траектории летательного аппарата как маятника со смещенной вниз условной точкой подвеса О1.
Периодическое опускание условной точки подвеса О соответствует временному увеличению угловой амплитуды γ колебаний маятника и компенсации энергетических потерь от силы воздушного сопротивления Рх при сохранении необходимой амплитуды колебаний летательного аппарата как маятника или аэромаятника.
Этот процесс наглядно иллюстрируется разверткой полной фазовой поверхности (фигура 2) с нижним полуцилиндром отрицательной скорости интегральных кривых минус у, которые заканчиваются на устойчивом цикле аэромаятника.
При достаточной начальной высоте этот цикл незатухающих колебаний может длиться сколько угодно долго, и выйти из него на обычную глиссаду или горизонтальный полет можно лишь за счет тяги маршевых двигателей или воздействием экранного эффекта земной поверхности, который резко увеличивает величину аэродинамических сил Ру и Рх, действующих как парашютная система и обеспечивающих посадку летательного аппарата на землю практически без пробега.
Замедлить скорость вертикального спуска и даже зависнуть над посадочной площадкой можно за счет раскачки аэромаятника синфазным включением тяги или реверса маршевых двигателей, управлять которыми может автопилот по соответствующей программе экстренной посадки.
Аналогичное управление величиной подъемной силы и кренового момента носового оперения можно производить синфазным и противофазным поворотом его торцевых шайб 6 также и в штатном режиме горизонтального полета вперед, при котором носовое оперение создает лишь незначительную подъемную силу и лобовое сопротивление, не мешающие обычному полету и посадке летательного аппарата.
Натурные испытания модели летательного аппарата с аэродинамической поверхностью тандемной "утки" и виртуальная компьютерная продувка трехмерной математической модели самолета подтвердили возможность предложенного полета летательного аппарата в режиме аэромаятника из любого начального положения летательного аппарата.
При этом штопор и глиссада практически не возникали либо быстро переходили в зигзагообразную траекторию спуска, которая заканчивалась характерной "посадкой вороны" фактически без горизонтального пробега. Поэтому практическое использование данного изобретения в новых и даже существующих типах самолетов позволит спасти жизни большинства пассажиров и пилотов, попавших в экстремальные условия полета.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОНВЕРТОЛЕТ | 2008 |
|
RU2369525C2 |
| ЛЕГКИЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1995 |
|
RU2082651C1 |
| АЭРОДИНАМИЧЕСКАЯ ПОВЕРХНОСТЬ И ПЛАНЕР ЛЕТАТЕЛЬНОГО АППАРАТА | 2017 |
|
RU2667410C1 |
| Многоцелевая сверхтяжелая транспортная технологическая авиационная платформа укороченного взлета и посадки | 2019 |
|
RU2714176C1 |
| ПЛАНЕР ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2646691C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ДВИЖИТЕЛЕМ В ВИДЕ МАШУЩИХ КРЫЛЬЕВ | 2002 |
|
RU2217355C1 |
| УНИВЕРСАЛЬНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ "ПУШ-ПУЛЕТ" | 2009 |
|
RU2412869C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2003 |
|
RU2235045C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2008 |
|
RU2466907C1 |
| РАКЕТА-НОСИТЕЛЬ | 2011 |
|
RU2482030C2 |


Изобретение относится к области авиации. Способ планирующего полета заключается в том, что аэродинамическая поверхность летательного аппарата выполнена симметрично-обратимой в виде тандемной утки путем размещения в носовой части летательного аппарата дополнительного ∨-образного оперения. Планирование характеризуется периодическими изменениями направления устойчивого движения летательного аппарата вперед-назад в режиме параметрического резонанса маятника с периодически опускаемой точкой подвеса по устойчивой, плоской зигзагообразной траектории, составленной из сопряженных отрезков волнообразной глиссады. Под влиянием экранного эффекта земной поверхности осуществляют замедленную вертикальную посадку летательного аппарата с критическими углами атаки его аэродинамической поверхности. Летательный аппарат выполнен симметрично-обратимым в виде тандемной утки путем размещения в носовой части летательного аппарата дополнительного ∨-образного оперения. Изобретение направлено на сокращение длины посадочной полосы. 2 н. и 2 з.п. ф-лы, 4 ил.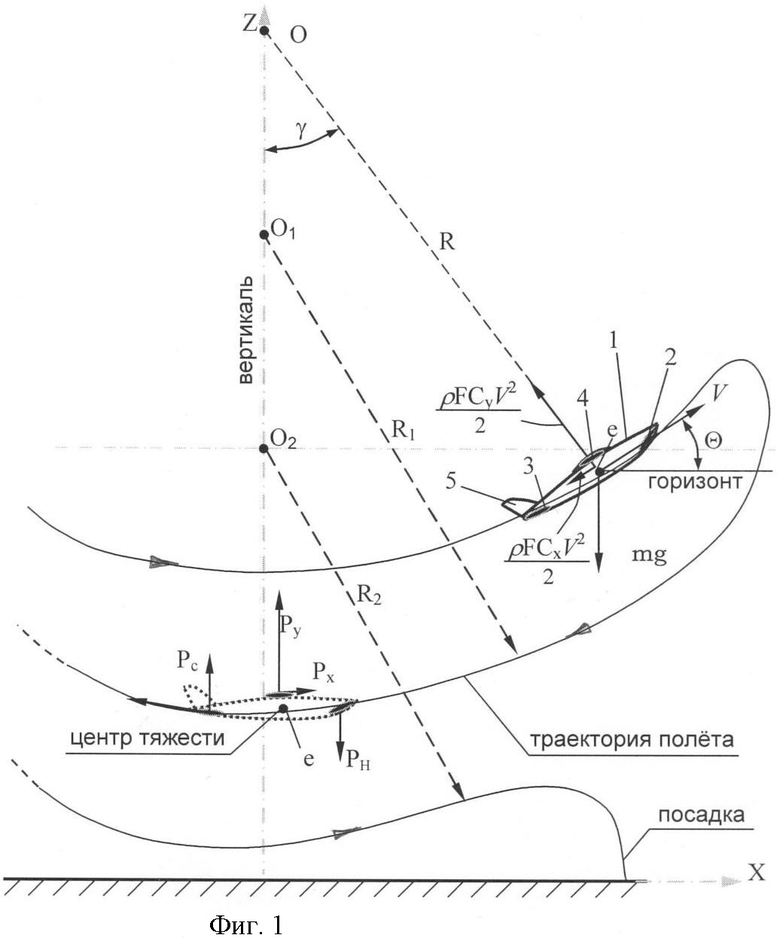
1. Способ планирующего полета летательного аппарата с аэродинамическими поверхностями, включающий крылья, хвостовой киль, стабилизатор, при котором осуществляют периодические колебания летательного аппарата в воздушном пространстве и гравитационном поле Земли, отличающийся тем, что аэродинамическая поверхность выполнена симметрично-обратимой в виде тандемной утки путем размещения в носовой части летательного аппарата дополнительного v-образного оперения с обеспечением отрицательной подъемной силы при движении летательного аппарата хвостом вперед, при этом планирование характеризуется периодическими изменениями направления устойчивого движения летательного аппарата вперед-назад за счет использования сил и моментов инерции в режиме параметрического резонанса летательного аппарата как маятника с периодически опускаемой точкой подвеса по устойчивой, плоской зигзагообразной траектории, составленной из сопряженных отрезков волнообразной глиссады, параметры которой определяют по интегральным кривым на боковой части цилиндрической фазовой поверхности возможных состояний летательного аппарата, где они образуют замкнутый цикл, автоматически переходящий под влиянием экранного эффекта земной поверхности в замедленную вертикальную посадку летательного аппарата с критическими углами атаки его аэродинамической поверхности.
2. Способ планирующего полета по п.1, отличающийся тем, что для замедления спуска или зависания над посадочной площадкой периодически включают тягу и реверс двигателей синфазно с колебаниями летательного аппарата как маятника.
3. Летательный аппарат для осуществления способа по п.1 или 2, включающий фюзеляж, крылья, аэродинамические поверхности хвостового оперения, включающего киль и стабилизатор, а также дополнительное носовое оперение, отличающийся тем, что аэродинамическая поверхность выполнена симметрично-обратимой в виде тандемной утки с центром аэродинамических сил, расположенным выше центра тяжести летательного аппарата традиционной компоновки путем выполнения дополнительного носового оперения v-образной формы, закрепленного на фюзеляже под таким же углом атаки, что и хвостовой стабилизатор, но с противоположным знаком относительно направления движения и с обеспечением отрицательной подъемной силы при движении хвостовым оперением вперед; при этом дополнительное носовое оперение снабжено торцевыми шайбами.
4. Летательный аппарат по п.3, отличающийся тем, что торцевые шайбы дополнительного носового оперения выполнены с осью поворота, установленной по нормали к нижней поверхности дополнительного оперения.
| US 3362659 A, 09.01.1968 | |||
| СПОСОБ ПОЛУЧЕНИЯ КАТАЛИЗАТОРА ПОЛИМЕРИЗАЦИИ И СОПОЛИМЕРИЗАЦИИ СОПРЯЖЕННЫХ ДИЕНОВ | 2007 |
|
RU2361888C1 |
| US 4598888 A, 08.07.1986 | |||
| САМОЛЕТ КОРОТКОГО ВЗЛЕТА И ПОСАДКИ | 1996 |
|
RU2103199C1 |

