Изобретение относится к машиностроению, в частности станкостроению и робототехнике для получения сложных траекторий движения исполнительного органа.
Цель изобретения - расширение кине- матических возможностей механизма путем увеличения числа возможных траекторий результирующего движения.
Положительный эффект достигается за счет выполнения регулируемыми ряда звеньев кинематической цепи.
На фиг. 1 показана схема .механизма; на фиг. 2 - регулируемые кривошипы, вид сбоку; на фиг. 3 - схема, поясняющая образование траектории; на фиг. -- примеры траекторий.
Механизм для преобразования движения содержит основной кривошипный вал , параллельный ему и установленный в его кривошипе дополнительный кривоишииый вал 2 с регулируемы.м по величине радиусом кривошипа и синхронизирующую вра- щение валов передачу, неподвижно установленное на валу 2 зубчатое колесо 3, вращающееся относительно вала 1 зубчатое колесо 4 и промежуточное зубчатое колесо 5. Кроме того, в синхронизирующую передачу входит кинематическая цепь 6, связывающая вращение вала 1 и зубчатого колеса 4. Кинематическая цепь 6 может иметь регулируемое передаточное отношение, т. е. включать вариатор либо раздельный привод на вал 1 и колесо 4 (не показано) .
в механизме выполнены регулируемыми радиусы кривошипных окружностей айв валов и 2, Регулировка величины в вала 2 в)П1олнена, например, так, как схематично показан на фиг. 1-3, т. е. кривошипная шейка 7 вала 2 имееет возможность перемещаться по направляющей, выполненной по щеке 8 кривошипа вала 2 с юследую- щей ее фиксацией винтом 9, либо в щеке этого кривошипа выполнены отверстия, рас- положенные на различном расстоянии от оси вала 2. В одно из отверстий, в зависимости от заданного расстояния в, монтируется кривошипная шейка 7 вала 2. В первом случае обеспечивается плавное регулирование расстояния в, во втором - ступенчатое. Ана- логичная регулировка величины а при сохранении зацепления в синхронизирующей передаче обеспечивается установкой промежуточного колеса 5 с возможностью вращения на вспомогательном кривошипе 10, который установлен на валу 1 с воз.можно- стью поворота и фиксации под некоторым углом / к кривошипу вала 1. Это достигается за счет неподвижной установки на валу 1 сектора 11, имеющего дугообразную прорезь 12, в которую входит элемент, скрепляющий кривошип 10 и сектор 11 неподвижно (не показан).
В механизме предусмотрено изменение первоначального взаимного положения ва
-
0
д 5
лов 1 и 2, что позволяет изменять ориентацию получаемой кривой. Указанное может быть достигнуто, например, за счет вывода из зацепления зубчатого колеса 5, установки необходимого взаимного положения валов I и 2 и последуюпдего восстановления зацепления колес 3-5 (фиг. 1 и 2).
Устройство работает следующим образом.
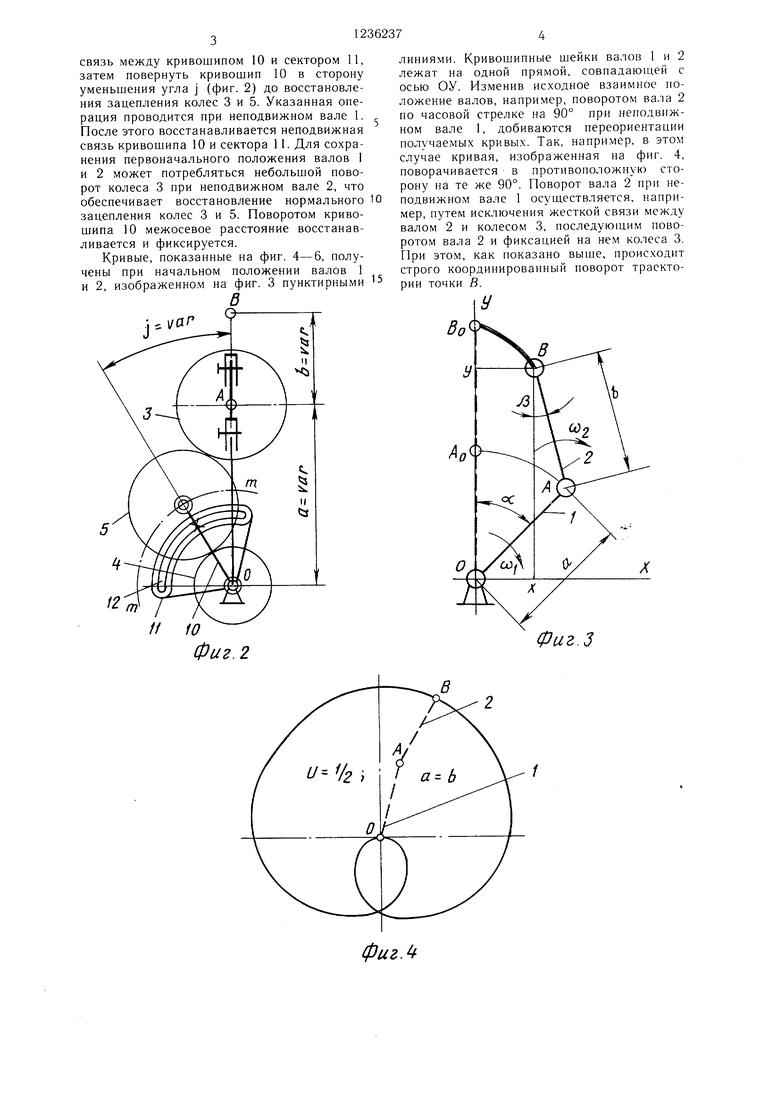
При вращении вала 1 с угловой скоростью 0)1 через синхронизирующую передачу обеспечивается вращение вала 2 с угловой скоростью (02 (фиг. 3). Передаточное отно- между валами I и 2 равноU tB|
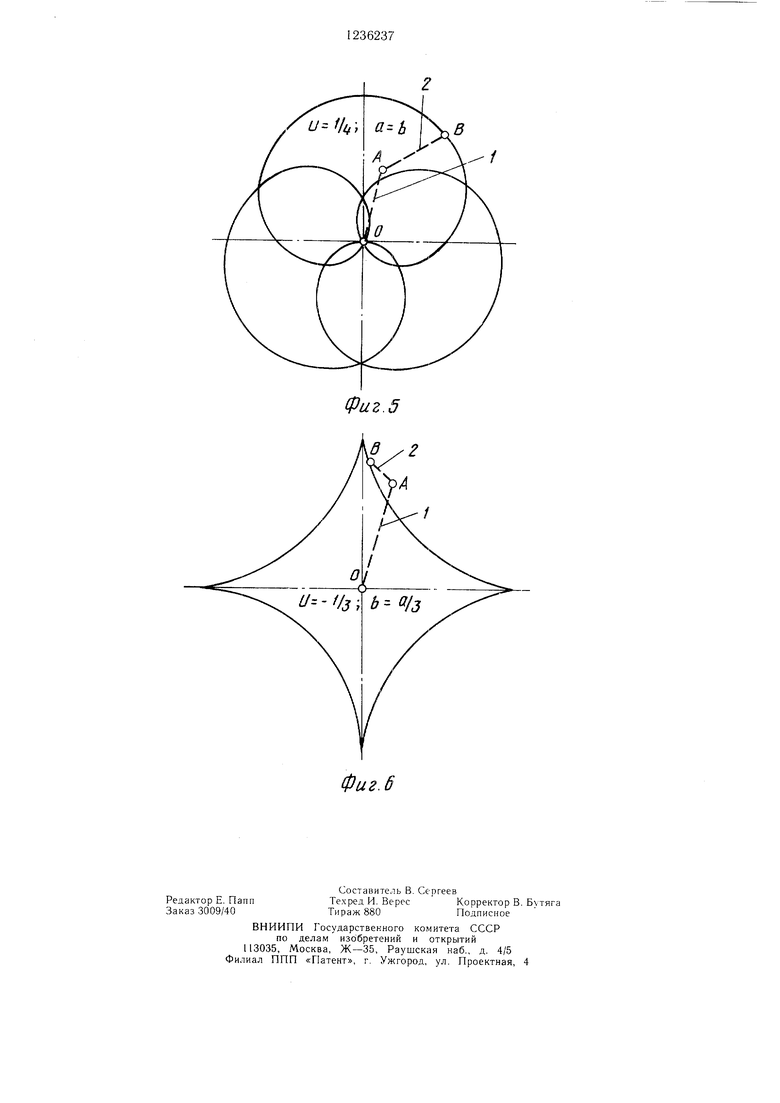
Неравенство угловых скоростей вызывает различные углы отклонения валов 1 и 2 от их начального положения. При этом кривошипная шейка 7 вала 2 (точка В, фиг. 3), движется по строго определенной траектории. Указанное движение передается и исполнительному звену. Характер траектории точки В зависит от передаточ- ijoi o отношения 1J 031/0)2 а/р, и соотношение размеров звеньев ОА а и АВ в валов 1 и 2. Так, например, при U - и точка В движется прямолинейно возвратно- поступательно, при и 1 траекторией точки В является окружность с радиусом R (а -j-ej и т. д. При настройке механизма с передаточным отношением и 1/2 и а в получают кривую, известную под названием Улитка Паскаля (фиг. 4). Оставляя то же значение и 1/2, но из.менив соотношения величин радиусов эксцентриковых осей до значения 2а, получают кардиоиду (не показана), а при и 1/4 и а в - трехлепестко- вую гипоциклоиду (фиг. 5). Настройка механизма на и 8 а/3 позволяет получить траекторию оси В в виде астроиды (фиг. 6). Таким образом, изменением переда- точно1 0 отношения между валами 1 и 2, а также изменение.м cooтнoцJeния а/а достигается возможность по. 1учения большего числа траекторий. Сохранив соотношение а/в при увеличении самих размеров айв, достигается возможность при том же передаточном отноп.1ении масп.ггабировать получаемые кривые.
Измерение размера в осуш,ествляется перемещением кривошипной шейки 7 вала 2 вдоль направляющей, перпендикулярной оси вала (бесступенчатое регулирование в), или установкой 7 в отверстия, вы- полие(П1ы;е в щ,еке 8 кpивoиJипa вала 2 на различно.м расстоянии от оси вала. Изменение радиуса а кривошипа основного вала (фиг. 1) может проводиться аналогичны.м образом.
При использовании синхронизирующей зубчатой передачи постоянного зацепления изменение размера а производится следующим образом. Увеличивается размер а. При этом нарушается зацепление колес 3 и 5. Для восстановления 110рмального зацепления этих колес необходимо исключить жесткую
связь между кривошипом 10 и сектором 11, затем повернуть кривошип 10 в сторону уменьшения угла j (фиг. 2) до восстановления зацепления колес 3 и 5. Указанная операция проводится при неподвижном вале 1. После этого восстанавливается неподвижная связь кривошипа 10 и сектора 11. Для сохранения первоначального положения валов 1 и 2 может потребляться небольшой поворот колеса 3 при неподвижном вале 2, что обеспечивает восстановление нормального зацепления колес 3 и 5. Поворотом кривошипа 10 межосевое расстояние восстанавливается и фиксируется.
Кривые, показанные на фиг. 4-6, получены при начальном положении валов I
и 2, изображенно.м на фиг. 3 пунктирными
р точки В.
линиями. Кривошипные шейки валон 1 и 2 лежат на одной прямой, совпадающей с осью ОУ. Изменив исходное взаимное положение валов, например, поворотом вала 2 по часовой стрелке на 90° при неподвижном вале 1, добиваются переориентации получаемых кривых. Так, например, в этом случае кривая, изображенная на фиг. 4, поворачивается в противоположную сторону на те же 90°. Поворот вала 2 при неподвижном вале 1 осуществляется, например, путем исключения жесткой связи между валом 2 и колесом 3, последующим поворотом вала 2 и фиксацией на нем колеса 3. При этом, как показано вьпие, происходит строго координированный поворот трасктоj
фиг.З
В
фиг Л
Фиг.5
Фиг. 6
Составитель В. Сергеев
Техред И. ВересКорректор В. Бутяга
Тираж 880Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий
113035, Москва, , Раушская наб., д. 4/5
Филиал ППП «Патент, г. Ужгород, ул. Проектная, 4
| название | год | авторы | номер документа |
|---|---|---|---|
| ИМПУЛЬСНЫЙ ВАРИАТОР | 2016 |
|
RU2620278C2 |
| СПОСОБ И УСТРОЙСТВО РЕГУЛИРОВАНИЯ УГЛА ВЫСТОЯ ЗУБЧАТО-РЫЧАЖНОГО МЕХАНИЗМА | 2005 |
|
RU2285168C1 |
| МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ДВИЖЕНИЯ | 1995 |
|
RU2102642C1 |
| Грейферное устройство для подачи заготовок в рабочую зону пресса | 1971 |
|
SU401092A1 |
| МЕХАНИЧЕСКАЯ БЕССТУПЕНЧАТАЯ ПЕРЕДАЧА | 2007 |
|
RU2334143C1 |
| ПРИВОД СКВАЖИННОГО ШТАНГОВОГО НАСОСА | 1996 |
|
RU2108486C1 |
| МЕХАНИЗМ РЕГУЛИРОВАНИЯ КРИВОШИПА ПЕРЕМЕННОЙ ДЛИНЫ | 1997 |
|
RU2124158C1 |
| Стан холодной прокатки труб | 1986 |
|
SU1419768A1 |
| ЛЕСОПИЛЬНАЯ РАМА | 2014 |
|
RU2557181C1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ ПОРШНЕВОГО ТИПА С ПЕРЕМЕННОЙ СТЕПЕНЬЮ СЖАТИЯ | 1996 |
|
RU2159858C2 |

| ПЛАНЕТАРНЫЙ ЭЛЛИПСОИДНЫЙ МЕХАНИЗМ | 0 |
|
SU288475A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
