ПРЕДПОСЫЛКИ К СОЗДАНИЮ ИЗОБРЕТЕНИЯ
Большинство железнодорожных колей можно представить в виде чередующихся прямых и криволинейных участков. Каждый криволинейный участок колеи может быть, в свою очередь, разделен на участки с постоянной кривизной на всем своем протяжении и участки, кривизна которых изменяется по длине участка. На прямолинейном участке угол поперечного уклона колеи обычно равен нулю (с возможным исключением вблизи каждого из концов участка). На криволинейном участке колеи с постоянной кривизной и не ограниченном низкой скоростью поезда угол поперечного уклона колеи обычно больше нуля и имеет постоянное значение (вновь, с возможным исключением вблизи каждого из концов участка). Между прямолинейным участком колеи с нулевым углом поперечного уклона и криволинейным участком с постоянными и отличными от нуля кривизной и углом поперечного уклона необходим переходной участок, на котором угол поперечного уклона изменяется на протяжении участка для обеспечения точного сопряжения с углами поперечного уклона на каждом конце смежных участков. Обычно кривизна такого переходного участка также изменяется по его длине и на каждом из своих концов сопрягается с кривизной смежных участков. Такая кривая сопряжения именуется спиралью. С самого начала и до настоящего момента чаще всего используется спираль, в которой угол поперечного уклона и кривизна изменяются линейно по длине переходного участка. Спираль, в которой кривизна изменяется линейно в зависимости от расстояния, имеет форму, называемую в железнодорожной промышленности клотоидой (или спиралью Корню прим. перев.).
Угол поперечного уклона колеи будет называться далее углом крена. Угол крена колеи установим равным углу поворота колесной пары транспортного средства вокруг продольной оси (т.е. оси, лежащей в плоскости колеи и параллельной направлению колеи в данной точке). Крен (roll - англ.) в значении "поперечный наклон", используемом здесь, не следует путать с вращением (по-английски тоже roll) колеса транспортного средства вокруг оси, которая, хотя и находится в плоскости колеи, но приблизительно перпендикулярна направлению колеи в данной точке.
Описание этого изобретения имеет отношение к кривизне колеи. Кривизна колеи - характеристика траектории колеи на виде сверху. Она равна производной направления (азимута) колеи в точке (в радианах) по расстоянию вдоль колеи. Кривизна колеи в точке равна также обратной величине радиуса окружности, для которой производная направления (азимута) по расстоянию вдоль ее контура имеет то же значение, что и для спирали.
Описание этого изобретения относится к "невязке" (взаимному сдвигу) между двумя соседними участками колеи, каждый из которых имеет постоянную кривизну. Смещение между двумя такими смежными участками колеи - это наименьшее расстояние между воображаемыми продлениями этих участков с фиксированными значениями их кривизны. Предположение, что это смещение больше нуля, является необходимым условием для связывания смежных участков с постоянной кривизной спиралью с монотонно изменяющейся кривизной.
Давно признано, что, когда рельсовое транспортное средство проходит по клотоидной спирали, оно подвергается воздействию резких боковых и креновых ускорений, которые причиняют небольшой дискомфорт пассажирам, а реактивные силы этих ускорений воздействуют на железнодорожную колею и ухудшают ее качество. В результате было предложено множество вариантов изменения кривизны спирали в зависимости от расстояния, а некоторые из них использовалась на практике. Различные способы проектирования спиралей сопряжения железных дорог, предложенные и используемые в прошлом, описаны подробно в цитируемом исследовательском отчете Б. Куфвера "Математическое описание проектирования железных дорог и некоторые предварительные сравнительные исследования", Шведский Национальный НИИ Транспорта и Дорог (Bjorn Kufver, VTI rapport 420A, "Mathematical description of railway alignments and some preliminary comparative studies", Swedish National Road and Transport Research Institute, 1997).
Кроме того, здесь должна быть учтена высота так называемой оси крена, являющейся продольной осью, вокруг которой колея поворачивается, с целью изменения угла крена. Было предложено и испытано на практике то, что характеристика спирали может быть существенно улучшена, если поднять ось крена выше плоскости (проекции) колеи. Эта методика документально доказана в цитируемой статье Пресла и Хасслингера (Gerard Presle & Herbert L Hasslinger, "Entwicklung und Grundlagen neuer Gleisgeometrie", ZEV + DET Glas. Ann. 122, 1998, 9/10, September/Oktober, page 579).
Все ранее опубликованные способы проектирования железнодорожных спиралей начинаются с определения вида функции кривизны колеи как зависимости от расстояния вдоль спирали. Кроме того, насколько известно заявителю, все ранее публиковавшиеся формулы кривизны спиралей приводят к разрывам третьей производной кривизны колеи на каждом конце спирали.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Данное изобретение является способом проектирования спиралей сопряжения криволинейных участков железнодорожной колеи.
Элементом новизны и отличием от известного уровня техники является то, что данный способ начинается не с выявления того, как кривизна колеи изменяется в зависимости от расстояния вдоль спирали, а, скорее, с определения вида функции (в оригинале - the manner, прим. перев.), по которому угол крена колеи будет изменяться, как функция от расстояния вдоль спирали. В описании этого способа математическое выражение, используемое обычно для определения изменения угла крена от расстояния вдоль спирали, называется функцией крена. В способе по этому изобретению первым шагом является выбор функции крена. Одной из причин, по которой удобно начать с изменения крена, является то, что это помогает пользователю способа принять точку зрения, что главной целью при проектировании спирали должно быть эффективное управление динамикой изменения крена, имеющего место при движении транспортного средства по участку спирали.
Этот способ включает дополнительные этапы. После того как функция крена выбрана и, таким образом, первый этап завершен, к функции крена применяются дополнительные шаги и приводят к определению формы спирали, которая обеспечит сопряжение между участками колеи с постоянной кривизной на обоих концах спирали.
Элементом новизны и отличием от известного уровня техники является то, что данное изобретение включает множество функций крена, специально разработанных для выбора на первом этапе способа и которые еще никогда не предлагались ранее для проектирования спиралей сопряжения рельсовой колеи.
Функции крена, включенные в данное изобретение, были разработаны для использования в рамках способа по этому изобретению. Однако, являясь изобретением, они могут также использоваться в контексте традиционного способа проектирования спирали, который начинается не с определения [угла] крена колеи, а, скорее, с определения ее кривизны. Это альтернативное использование реализуется взятием функции крена настоящего изобретения и интерпретацией ее не как зависимости крена от расстояния, а, скорее, как ее пропорциональности зависимости кривизны пути от расстояния. Это альтернативное использование возможно, потому что в уравнении (1) из раздела ОПИСАНИЕ ОСНОВНОГО ПРИМЕНЕНИЯ значение угла крена, выраженного в радианах, обычно настолько мало, что приблизительно равно тангенсу этого угла. Процедура конструирования спирали с кривизной колеи как функции от расстояния вдоль спирали, определяемой с использованием постоянного множителя, хорошо известны в данной области техники. (Константа пропорциональности определяется вышеупомянутым уравнением (1) и требованием, что угол крена каждого конца спирали должен соответствовать углу крена каждого смежного участка колеи). Хотя использование функций крена настоящего изобретения таким дополнительным способом считается менее ценным по сравнению с основным применением, такое его использование также включено в изобретение.
Рассмотрим продольную ось, вокруг которой колея как бы поворачивается, как точку наблюдения, перемещающуюся вдоль спирали. Эта ось называется осью крена. Наиболее часто традиционная практика проектирования спирали располагает ось крена в плоскости колеи. Однако известно в течение некоторого времени, что колея спиральной формы может проектироваться с осью крена, расположенной выше плоскости (проекции) колеи. Более того, Пресл и Хасслингер утверждают, что увеличение высоты оси крена может быть полезным и вызвать существенное улучшение динамических характеристик спиралей. Настоящее изобретение включает использование собственных новых элементов, в комбинации с известным ранее принципом расположения оси крена выше плоскости колеи.
Чтобы получить реальные конструкции спиралей по способу настоящего изобретения, необходимо выполнить обширные математические вычисления. Типовые формы спиралей, иллюстрируемые на Фиг.9 и 10, прилагаемых здесь, были рассчитаны на обычном персональном компьютере с использованием компьютерных программ, написанных изобретателем. Эти программы включают формулы функций крена, которые являются частью настоящего изобретения, что позволяет использовать любую из включенных в изобретение функций крена. Кроме того, эти программы выполняют этапы способа механически без введения каких-либо других физических и геометрических элементов, помимо общепринятых, используемых обычно для представления результатов. Любой человек, квалифицированный в геометрии проектирования железнодорожной колеи и написании компьютерных программ для расчета объектов гражданского строительства, может написать компьютерные программы, которые осуществляют последовательность этапов метода, как раскрывается в настоящей заявке, и таким образом получить те же самые формы спиралей, как те, что иллюстрируются на Фиг.9 и 10.
ЧЕРТЕЖИ
Фиг.1-8 иллюстрируют функции крена, любая из которых или любая их комбинация могут быть использованы как функция крена для способа проектирования, являющегося частью настоящего изобретения.
Фиг.9 и 10 - это графики, иллюстрирующие, как могут выглядеть спирали, разработанные согласно способу этого изобретения, в сравнении с традиционными спиралями двух реально существующих участков железнодорожной колеи.
ОПИСАНИЕ ОСНОВНОГО ПРИМЕНЕНИЯ
Настоящий способ проектирования спирали кривой сопряжения для железнодорожной колеи начинается с выбора математической функции, определяющей характер изменения угла крена колеи (иногда называемого углом поперечного уклона или углом возвышения наружного рельса) как функции от расстояния вдоль спирали. Функция, определяющая, как меняется угол крена по длине спирали, называется здесь функцией крена. Функция крена обозначена символом r(s), где s обозначает расстояние по длине спирали.
Настоящий способ обуславливает ограничение для функции, используемой в качестве функции крена, такое, что ее вторая производная по длине должна равняться нулю в каждом конце спирали и быть непрерывна по всей длине спирали. Кроме того, для настоящего способа предпочтительно, чтобы функция, используемая в качестве функции крена, имела третью производную по длине, равную нулю на каждом конце спирали и непрерывную по всей длине спирали. Настоящее изобретение вводит несколько частных функций крена, и по заявлению заявителя они пригодны для определения спиралей. Все эти функции имеют три параметра, обозначенные здесь как "а" (без кавычек), roll_begin, и roll_change. Параметр а представляет собой половину длины спирали, параметр roll_begin - начальный угол крена в одном конце спирали, а параметр roll_change - суммарный прирост угла крена по всей длине спирали. Некоторые из функций крена, представленные здесь, имеют один или два дополнительных параметра.
Когда проектируется спираль для размещения между двумя участками колеи постоянной кривизны и их соединения, тогда углы поперечного уклона каждого из этих участков обычно выступают в качестве начальных условий. Это означает, что параметры roll_begin (начального угла крена) и roll_change (суммарного прироста угла крена) определены, а форма спирали будет определяться длиною спирали и в случаях, когда функции крена имеют дополнительные параметры, - значениями этих дополнительных параметров. Настоящий способ включает функции крена, которые дают лучшие характеристики, чем функции крена, присущие любому из предлагавшихся ранее методов проектирования спиралей. Функции крена, включенные в настоящее изобретение, представлены ниже.
Настоящий способ включает использование хорошо известного и общепринятого ограничения, которое связывает угол крена в данной точке спирали и кривизну колеи в этой точке. Это ограничение реализует физический принцип, что центростремительное ускорение, свойственное движению по изогнутому пути, должно в идеале образовываться, скорее, ускорением силы тяжести, чем поперечным усилием, прикладываемым рельсами к транспортному средству. Это ограничение применяется конкретно к составляющим центростремительного ускорения и силе тяжести, лежащими в плоскости пути и перпендикулярными направлению движения. Это ограничение выражается формулой

Здесь:
b обозначает угол (азимут) направления колеи в точке в радианах,
s обозначает расстояние вдоль участка колеи,
db/ds представляет собой производную угла направления по расстоянию s,
g обозначает ускорение силы тяжести, и
vb - так называемая равновесная скорость на кривой (т.е. скорость транспортного средства, при которой составляющие центростремительного ускорения и гравитационного ускорения, параллельные плоскости колеи, должны быть уравновешены).
Для любой из данных спиралей, разработанных в соответствии со способом настоящего изобретения, r(s) характеризует изменение крена как функцию от расстояния, что отвечает критериям настоящего изобретения (как описано выше в общих выражениях и как подробно уточняется ниже). В способе по настоящему изобретению вышеупомянутое уравнение интегрируется по расстоянию, чтобы получить b(s), где b(s) обозначает угол направления как функция от расстояния. Затем два уравнения

и

интегрируем по расстоянию s для получения декартовых координат точек для построения спирали.
Настоящее изобретение включает использование публиковавшегося ранее, но не слишком известного, принципа расчета спирали, получаемой вышеупомянутым интегрированием для определения траектории оси, вокруг которой поворачивается колея, с подъемом этой оси выше плоскости [проекции] колеи, и построения линии колеи с помощью простых геометрических формул

и

где xt и уt - координаты точки на колее, а xr и уr соответствует точкам на траектории оси крена, h обозначает высоту оси крена, a b(s) - зависимость угла (азимута) направления траектории оси крена (относительно оси х) от расстояния s.
Когда должна быть проведена корректировка колеи существующей железной дороги, часто необходимо найти форму спирали, которая соединит должным образом два уже существующих участка колеи с заданными значениями кривизны и невязки. Настоящий способ включает следующий рецепт для определения значений параметра половины длины спирали а так, чтобы спираль, основанная на частной функции крена, правильно присоединилась к двум смежным участкам колеи.
Шаг 1. Если функция крена имеет дополнительные параметры кроме roll_begin, roll_change и половины длины а, тогда выбираем значения этих дополнительных параметров.
Шаг 2. Выбираем начальное значение параметра половины длины а.
Шаг 3. Интегрируем уравнение (1), чтобы получить азимут направления колеи как функции от расстояния вдоль спирали. Для всех функций крена, которым в настоящем изобретении отдано предпочтение, интегрирование не может быть выполнено в конечном виде и должно выполняться численными методами. Затем интегрируем уравнения (2) и (3) для получения координат x и у конца спиральной траектории оси крена относительно начала спирали. Затем применяем уравнения (4) и (5) для получения координат конца спирали колеи относительно начала спирали колеи.
Шаг 4. Применяем простую тригонометрию для определения значения невязки между примыкающими кривыми (или криволинейным и прямым участками), как если бы они были связаны только что рассчитанной спиралью.
Шаг 5. Основываясь на разнице между изначально установленной невязкой и невязкой, соответствующей только что рассчитанной форме спирали, определяем поправку к длине спирали.
Шаг 6. Повторяем шаги с 3 по 5 до тех пор, когда разница между начальным и расчетным смещениями станет пренебрежимо малой.
Шаг 7. Если в функции крена используются дополнительные параметры, тогда повторяем шаги со 2 по 6 для ряда (последовательности) значений этих дополнительных параметров и исследуем, как они влияют на характеристики спирали, такие как максимальный перекос полотна, максимальное угловое ускорение крена и максимальный скачок крена (скачок является производной ускорения).
В настоящем способе проектирования спираль полностью определяется выбранной функцией крена, начальным и конечным углами крена, выбранной длиной спирали и присвоенными значениями параметров, таких как f и с (описанными ниже) в случае, если выбранная функция крена имеет такие параметры. Начальный и конечный углы крена фиксированы, потому что они должны равняться углам поперечного уклона примыкающих участков колеи, которые должны связываться спиралью. Спираль, соответствующая предписанной невязке, находится путем итерационных приближений по длине спирали. Если отобранная функция крена имеет дополнительные параметры, их можно менять либо для уменьшения максимального перекоса колеи, либо для уменьшения максимального углового ускорения или углового скачка спирали.
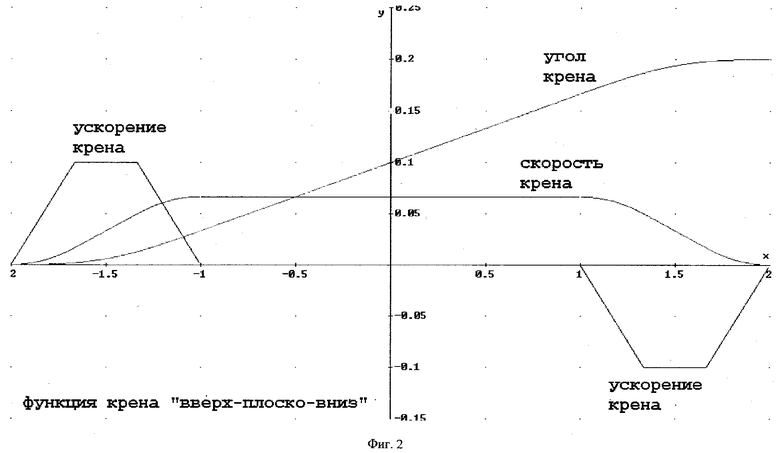
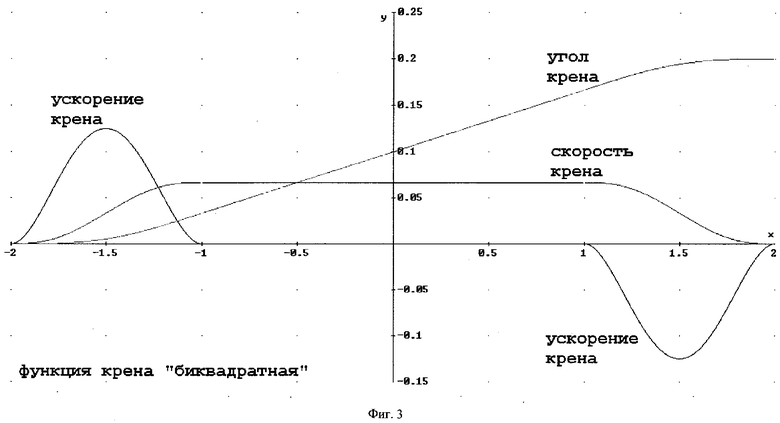
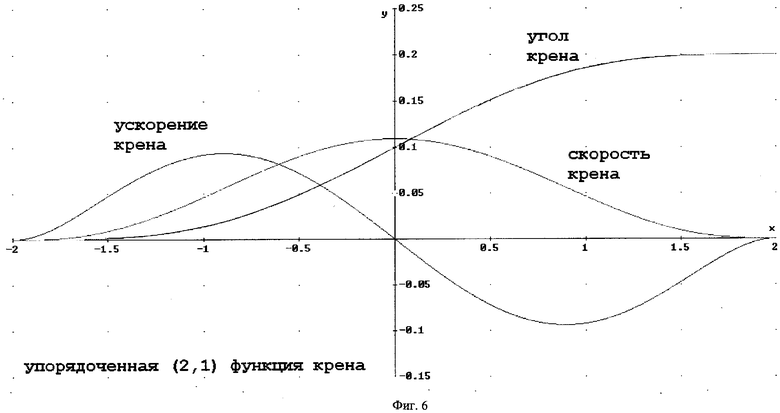
Примеры функций крена, включенных в настоящий способ, перечислены ниже. В каждом примере функции крена задается математическая формула второй производной угла крена от расстояния вдоль спирали. Эта вторая производная представляется здесь как ускорение крена. Каждая из включенных функций ускорения крена равна нулю на каждом конце спирали и непрерывна по всей длине спирали. Предпочтительны функции крена, в которых угловой скачок (производная ускорения крена от расстояния вдоль спирали) также равен нулю на каждом конце спирали и непрерывен по всей длине спирали. Таким образом, хотя функции крена, представленные на Фиг.1 и 2, включены в способ, они не столь эффективны, как функции крена, соответствующие Фиг.3 и последующим.
Принцип подъема оси крена выше плоскости колеи не является сам по себе частью настоящего изобретения. Однако способ настоящего изобретения требует, чтобы ось крена была поднята выше плоскости колеи, если нет каких-либо ограничений, не связанных непосредственно с геометрией спирали, которые делают нецелесообразным подъем оси крена. Превосходство функций крена, соответствующих Фиг.3 и последующим, особенно очевидно, когда ось крена поднята выше плоскости колеи.
Линейная комбинация двух или более из включенных функций крена с индивидуальными взвешенными множителями, которые в сумме дают единицу (так, чтобы roll_change не менялся), может служить в качестве дополнительной функции крена, и такие комбинации включены в способ и заявлены как часть изобретения.
Формулы, представленные ниже, включают следующие условия.
a) Расстояние вдоль спирали называется s, и s=0.0 в средней точке спирали.
b) Спираль простирается от s=-а до s=+а, таким образом, спираль имеет длину 2а.
c) Каждая из функций крена, соответствующих фиг.1 - 5 (а также функции "биквадратно-плоская" и ″триквадратная (6-й степени)", которые не иллюстрируются) имеют центральную зону, в которой ускорение крена тождественно равно нулю. Функции этой группы иногда называются ″кусочными" функциями, потому что для всех этих функций центральная зона простирается от s=-fa до s=+fa, так что параметр Т является отношением длины центральной зоны к длине всей спирали. Для функций с плоской зоной ширина этой зоны дается формулой c(1-f)a, где с - это параметр, значение которого меняется между 0 и 1.
d) Разность между конечным и начальным углом крена называется 'roll_change'.
Это изобретение включает семейство функций ускорений крена, которые определяются здесь термином порядка (m, n), где m - целое число больше 1, и n - целое число больше 0. Общая форма функции крена в этом семействе является произведением трех частей, указанных ниже:
Множители (а+s)m(а-s)ms|s|(n-1), которые дают зависимость от расстояния s;
множитель roll_change; и
нормировочный множитель, зависящий только от m, n и а.
В вышеупомянутом выражении |s| обозначает абсолютную величину s. Нормировочный множитель для данных значений m и n определяется в соответствии с требованием, что изменение угла крена на всей длине спирали должно равняться roll_change (приросту угла крена). Нормировочный множитель для конкретных значений m и n находится с помощью компьютерной программы символьной алгебры для работы с формулами, такой, например, как программа Derive, предоставляемая компанией Texas Instruments, Inc. На дату подачи этой заявки. Некоторые из функций ускорения крена порядка (m, n), которые заявитель посчитал полезными для проектирования железнодорожных спиралей, перечислены ниже и проиллюстрированы на диаграммах. Тем не менее, все функции порядка (m, n), включая функции, где n является четным положительным целым числом, включены в изобретение.
Функция ускорения крена, которая могла быть выражена как функция порядка (1,1), не включена в это изобретение, так как она привела бы к построению спирали, совершенно подобной типу спирали, описанной в исследовательском отчете Б. Куфвера и названной Куфвером спиралью типа Ваторек (Watorek).
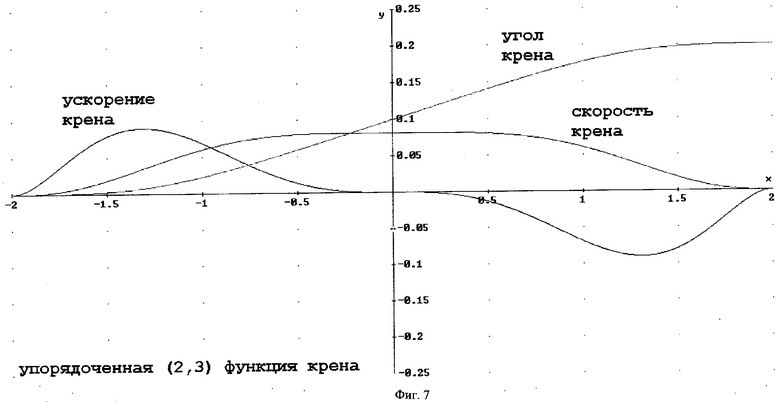
Согласно настоящему изобретению дополнительные функции ускорения крена могут быть получены применением нелинейных преобразований частного вида к любой из функций ускорения крена, детально заданных здесь. Для иллюстрации рассмотрим функцию ускорения крена, названную здесь функцией порядка (2,3). Присвоив ускорению крена временное название accel(s), получаем из нижеследующей таблицы:
accel(s)=-315 roll_change(a+s)2(a-s)2s3/(16а9)
Применяя к accel(s) нелинейное преобразование, представляющее из себя взятие абсолютной величины, возведение в степень 3/2 и умножение результата на -SIGN(s), мы получаем новую функцию:
accel_transformed(s)=-SIGN(s)|accel(s)|3/2
Это нелинейное преобразование имеет три свойства: 1) новая функция равна нулю всегда, когда accel(s) равна нулю, 2) в каждом значении s вдоль по спирали первые производные как от новой функции, так и accel(s) по s, либо обе равны нулю, либо имеют одинаковый знак, и 3) новая функция имеет ту же самую антисимметрию относительно s=0, что и accel(s). Три вышеуказанных свойства определяют тип нелинейных преобразований, с помощью которых из детально заданных здесь функций ускорения крена могут быть получены дополнительные функции ускорения крена. Новая функция ускорения крена может быть дважды проинтегрирована для получения соответствующей новой функции угла крена, а затем новые функции могут быть перенормированы (т.е. постоянные множители, относящиеся соответственно к каждой функции, могут быть скорректированы) таким образом, чтобы новая функция крена принимала необходимое значение roll_change. Для некоторых комбинаций заданной функции ускорения крена, нелинейного преобразования и двух ее интегрирований, необходимых для получения дополнительной функции крена, применимы аналитические методы, для других комбинаций преобразования используются численные методы. Умножая одну из первых шести функции ускорения крена, детально заданных ниже, на четную функцию от s типа |s|, или s2 или (|s|-а), или (|s|-fa) и перенормировывая преобразованную функцию, находим другой пример нелинейного преобразования, с помощью которого можно получить дополнительную функцию ускорения крена из выбранной функции ускорения крена.
Ниже, в качестве примера, представлены формулы функций ускорения крена. Формулы для скорости крена (т.е. первой производной от угла крена по расстоянию вдоль спирали) и для самого угла крена получаются в конечном виде (т.е. в виде стандартных математических функций), из этих образцовых функций ускорения крена путем последовательного интегрирования от s=-а до текущего значения аргумента s в пределах спирали. Константа интегрирования для скорости крена всегда нуль. Константа интегрирования для угла крена угол крена в начале спирали, где s=-а. Результаты этих интегрирований иллюстрируются на диаграммах.
Каждая из функций крена порядка (m, n), перечисленных здесь, ниже дана в полном виде. В случае с кусочными функциями, соответствующими фиг.1 - 5 (и функциями "биквадратно-плоской" и "триквадратной"), общие выражения более сложные, и каждая из них представляется в последующей таблице формулами, применяемыми для первой зоны слева. Общие формулы для кусочных функций крена слишком длинные, чтобы вместиться в эту таблицу, и поэтому представлены в конце данного раздела.
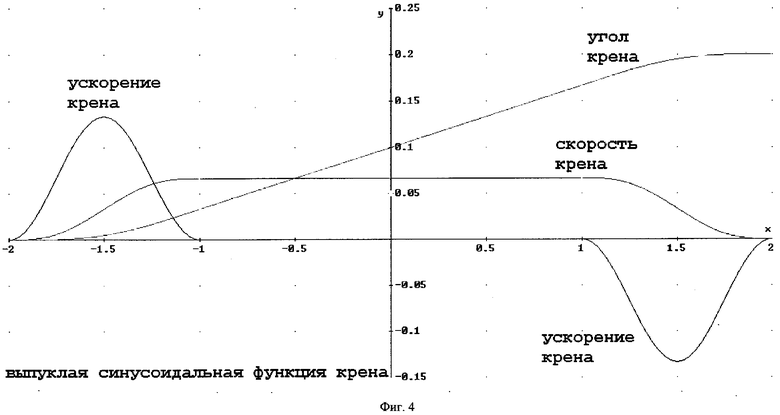
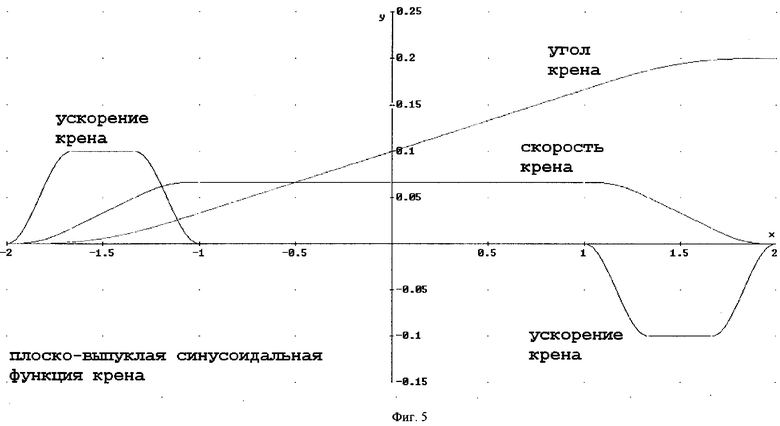
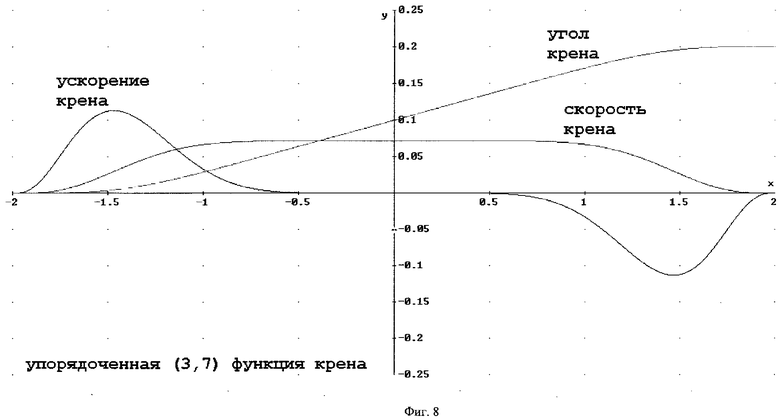
Фиг.1-8 иллюстрируют выбранные функции крена в соответствии с нумерацией следующего списка. На каждом чертеже изображены надписанные кривые, представляющие угол крена как функцию от расстояния, его производную скорость крена, и вторую производную ускорение крена. Название каждого чертежа описывает форму ускорения крена. Форма ускорения крена наилучшим образом характеризует соответствующую функцию крена. Чтобы облегчить сравнение функций крена, для всех графиков оси расстояния размечены одинаково: от -2.0 до + 2.0, а угол крена охватывает диапазон от 0.0 до 0.2.
Фиг.1: Линейная "вверх вниз": В этой функции крена ускорение кусочно-линейно и
имеет центральную часть переменной ширины, в которой ускорение крена тождественно
равно нулю.
Фиг.2: Линейная "вверх плоско вниз": Эта функция крена такая же, как линейная функция "вверх вниз", за исключением того, что каждая зона ускорения, отличная от нуля, разбита на три подзоны с постоянным ускорением крена в центральной подзоне.
Фиг.3: "Биквадратная": Эта функция крена называется здесь биквадратной, потому что ускорение крена дается в виде полинома 4-й степени за исключением центральной зоны, где оно тождественно нулю. Оно имеет нуль второго порядка в каждой из четырех точек, где s=a или s=fa.
Фиг.4: Выпуклая синусоидальная: Эта функция крена выглядит и ведет себя очень похоже на биквадратную функцию. Однако на краях, где ускорение отлично от нуля, оно имеет подъемы в виде полного цикла синусоиды.
Фиг.5: Плоско-выпуклая синусоидальная: Это вариант предыдущей функции. Она аналогична биквадратно-плоской функции. Выглядит и ведет себя подобно той же биквадратно-плоской функции.
Фиг.6: Порядок (2,1): Каждая из предыдущих функций крена получена из функций ускорения крена, построенных с несколькими зонами и математической формой, меняющейся от зоны к зоне. Данная же функция крена и последующие, напротив, основаны на соответствующих общих полиномиальных выражениях, применяемых ко всей длине спирали. Эта функция соответствует порядку (2,1); это означает, что кривая ускорения крена имеет нуль 2-го порядка на каждом конце спирали и нуль 1-го порядка в центре спирали. Последующие функции обозначаются аналогично согласно порядку нуля в каждом конце спирали и порядку нуля в центре спирали.
Фиг.7: Порядок (2,3) (см. выше).
Фиг.8: Порядок (3,7) (см. выше).
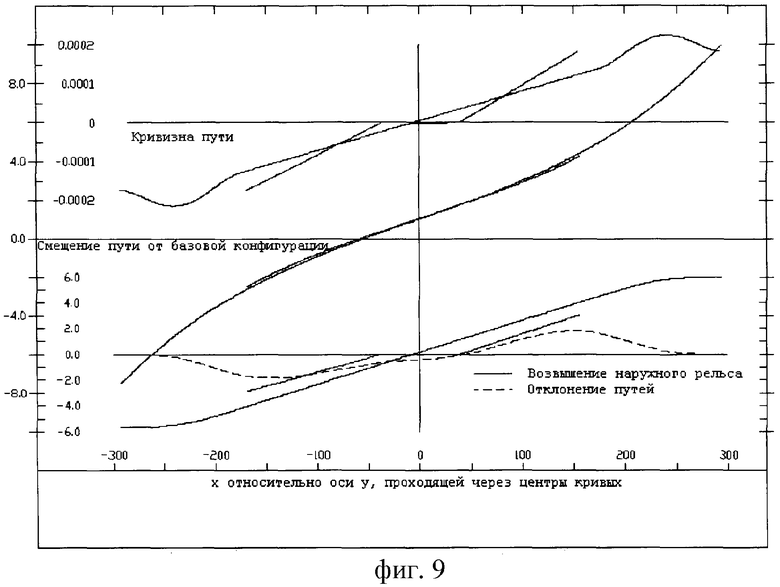
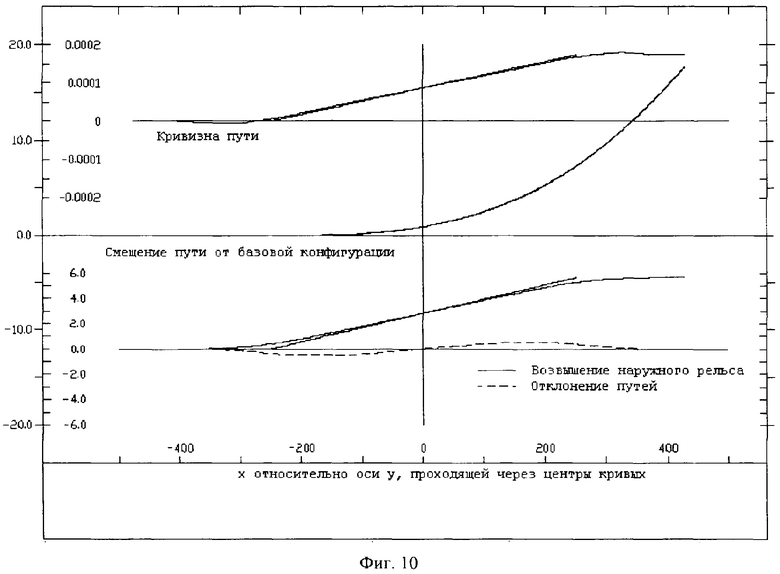
Примеры практических спиралей, разработанных по способу настоящего изобретения, иллюстрируются на графиках фиг.9 и 10. На этих чертежах сравниваются спирали, разработанные согласно способу настоящего изобретения с традиционными спиралями двух реально существующих участков колеи железной дороги. На этих двух чертежах кривые, изображающие кривизну и возвышение наружного рельса спиралей, разработанных согласно способу по этому изобретению, отличаются от существующих аналогов традиционных спиралей тем, что последние составлены полностью из прямолинейных сегментов и не простираются так далеко от центра фигуры в обоих направлениях. Верхняя часть каждого графика показывает кривизну колеи, средняя прохождение траектории спиралей на виде сверху, а нижняя часть каждого графика показывает возвышение наружного рельса и, пунктирной кривой, поперечный сдвиг между траекториями спиралей традиционной и разработанной по настоящему способу. В средней части каждого графика проходит ось х, проведенная касательно к продлению кривой с постоянной кривизной или касательно прямому участку, примыкающим к спирали слева. Фиг.9 для сопряжения частей так называемой S-образной кривой (т.е. двух противоположно искривленных кривых, находящихся настолько близко друг к другу, что все расстояние между ними или большая его часть занята спиралью или парой спиралей). Фиг.10 - пример простого сопряжения прямого участка с криволинейным.
Фиг.9: пример с высотой оси крена 7 футов (2134 мм) и биквадратной функцией крена с длиной центральной зоны нулевого ускорения = 60% всей длины спирали. Традиционная спираль разработана для уравновешенной скорости 64 мили в час (103 км/ч), а улучшенная спираль спроектирована для уравновешенной скорости 90 миль в час (144 км/ч). Фиг.10: пример с высотой оси крена 7 футов (2134 мм) и функцией крена с порядком (3,5). Обе спирали как традиционная, так и улучшенная спроектированы для уравновешенной скорости 90 миль в час (144 км/ч).
Формулы ускорения крена (второй производной от угла крена по расстоянию вдоль спирали) для кусочных функций, соответствующие фиг.1-5 (и функций "биквадратно-плоская" и "триквадратная", которые не иллюстрируются), приводятся далее на языке программирования Си. Эти формулы используют тригонометрические функции sin(x) и cos(x) плюс следующие три функции: fabs(s) - абсолютное значение s; sign(x), равную -1 для х<0, 0 для х=0 и +1 для х>0 и pow(a,n) - это а в степени n.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАЗМАЛЫВАЮЩИЙ КОНУС, СЕГМЕНТ ПЛАСТИНЫ ДЛЯ КОНУСА ВРАЩАТЕЛЬНОГО РАФИНЕРА, КОНИЧЕСКИЙ РАФИНЕР, А ТАКЖЕ СПОСОБ ИЗГОТОВЛЕНИЯ НАБОРА ПРОТИВОЛЕЖАЩИХ ПЛАСТИН ДЛЯ КОНИЧЕСКОГО РАФИНЕРА | 2006 |
|
RU2390379C2 |
| Винт потоковый | 2021 |
|
RU2778584C1 |
| ЛОПАСТНЫЙ ВИНТ | 2017 |
|
RU2742113C2 |
| СПОСОБ ИЗМЕРЕНИЯ И ИЗОБРАЖЕНИЯ ГЕОМЕТРИИ ПУТИ СИСТЕМЫ РЕЛЬСОВОГО ПУТИ | 2015 |
|
RU2682953C2 |
| СПОСОБ ИНЕРЦИАЛЬНЫХ ИЗМЕРЕНИЙ НЕРОВНОСТЕЙ РЕЛЬСОВОГО ПУТИ | 2002 |
|
RU2242391C2 |
| СПОСОБ УПРАВЛЕНИЯ СПУСКОМ КОСМИЧЕСКОГО АППАРАТА В АТМОСФЕРЕ ПЛАНЕТЫ | 2013 |
|
RU2537192C1 |
| СПОСОБ КОНСТРУИРОВАНИЯ СОПРИКАСАЮЩИХСЯ ТЕЛ С ОДНОНАПРАВЛЕННЫМ ВРАЩЕНИЕМ И КОМПЬЮТЕРНАЯ СИСТЕМА ДЛЯ РЕАЛИЗАЦИИ ЭТОГО СПОСОБА | 2010 |
|
RU2554647C9 |
| Способ проектирования и контроля параметров профиля наклонно-направленной скважины | 2021 |
|
RU2772264C1 |
| СПОСОБ УПРАВЛЕНИЯ СПУСКОМ КОСМИЧЕСКОГО АППАРАТА В АТМОСФЕРЕ ПЛАНЕТ | 2012 |
|
RU2493059C1 |
| УСТРОЙСТВО ДЛЯ ГАШЕНИЯ ВРАЩАЮЩЕГО МОМЕНТА, ПРЕДНАЗНАЧЕННОЕ ДЛЯ ВЕРТОЛЕТА | 1995 |
|
RU2138422C1 |
Изобретение относится к железнодорожному транспорту. Форма участка железнодорожной колеи - спираль кривой сопряжения - определяется следующим образом. Сначала выбирается математическое выражение, которое является функцией от расстояния вдоль спирали, которая определяет значение поперечного угла уклона или крена колеи как функцию от расстояния вдоль спирали и включает длину спирали как переменный параметр. Затем налагается обычное условие, что для транспортного средства, проходящего по участку колеи с установленной скоростью, в каждой точке спирали поперечные составляющие центростремительного и гравитационного ускорения в плоскости колеи находятся в равновесии. На следующем этапе используется известное дифференциальное уравнение, выражающее вышеупомянутое равновесие, и берется его интеграл по расстоянию вдоль спирали для получения угла (азимута) направления колеи относительно угла направления колеи в начале спирали как функции от расстояния вдоль спирали. Затем используется угол (азимут) направления колеи, полученный на предыдущем этапе, и интегрируется его синус и косинус по расстоянию вдоль спирали для получения декартовых координат точек спирали относительно координат начала спирали, и, таким образом, завершается определение спирали в соответствии с математической функцией, выбранной на первом этапе. Повторяются шаги с первого по предыдущий с различными вариантами математической функции до тех пор, пока не будет найдена форма спирали, которая обеспечит сопряжение между участками колеи с постоянной кривизной на обоих концах спирали. В результате улучшается качество железнодорожной колеи, транспортное средство не подвергается резким боковым и креновым ускорениям. 4 з.п. ф-лы, 10 ил., 1 табл.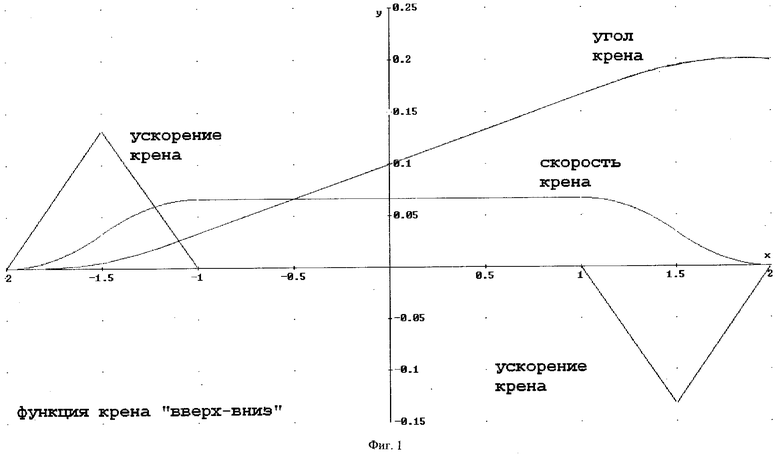
a) выбирается математическое выражение, которое является функцией от расстояния вдоль спирали, которая определяет значение поперечного угла уклона или крена колеи, как функцию от расстояния вдоль спирали, и включает длину спирали как переменный параметр;
b) налагается обычное условие, что для транспортного средства, проходящего по участку колеи с установленной скоростью, в каждой точке спирали поперечные составляющие центростремительного и гравитационного ускорения в плоскости колеи находятся в равновесии;
c) используется известное дифференциальное уравнение, выражающее вышеупомянутое равновесие, и берется его интеграл по расстоянию вдоль спирали для получения угла (азимута) направления колеи относительно угла направления колеи в начале спирали как функции от расстояния вдоль спирали;
d) используется угол (азимут) направления колеи, полученный на предыдущем этапе (с), и интегрируется его синус и косинус по расстоянию вдоль спирали для получения декартовых координат точек спирали относительно координат начала спирали и, таким образом, завершается определение спирали в соответствии с математической функцией, выбранной на этапе (а) данного пункта;
e) повторяются шаги с (а) по (d) данного пункта с различными вариантами математической функции до тех пор, пока не будет найдена форма спирали, которая обеспечит сопряжение между участками колеи с постоянной кривизной на обоих концах спирали.
Приоритет по пунктам:
| RU 93027362 А, 10.01.1996 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ В ПЛАНЕ В КРУГОВЫХ КРИВЫХ | 1990 |
|
RU2030505C1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |

