Предлагаемое изобретение относится к механизмам со сложным движением выходных звеньев, применяемым для выполнения технологических операций при обслуживании машин и оборудования. Такие механизмы обеспечивают захват изделия, его перемещение из одной позиции в другую, освобождение и передачу изделия.
Известно, например, устройство, обеспечивающее захват изделия, его перемещение по дуге окружности и освобождение, содержащее исполнительный механизм с губками для захвата изделий, механизм поворота и гидропривод (Крайнев А.Ф. Словарь-справочник по механизмам. - М.: Машиностроение, 1987. - С.9 и 10, рис.а).
Основным недостатком данного устройства является усложненность привода и малая частота повторения рабочих циклов, т.е. невысокая производительность. Указанный недостаток является результатом использования отдельных двигателей для механизмов захвата и поворота, а также применения тихоходного гидравлического привода. Недостаток особенно ощутим при агрегатировании устройства с машинами -автоматами и линиями высокой производительности.
Известно также устройство для передачи изделий, выполненное в виде комбинированного механизма, содержащего передаточный механизм с ведущим и выходным звеньями, исполнительный механизм с выходными звеньями и губками для захвата изделий и привод (Патент №2217296, опубл. в БИПМ, 2003. - №33 - прототип).
Основной недостаток прототипа заключается в том, что выходное звено передаточного механизма, выполненное в виде толкателя, сопряженного с неподвижным кулачком и ведущим кривошипом, несущего выходные звенья исполнительного механизма с губками для захвата изделий, совершает сложное движение: возвратно-поступательное от взаимодействия с профилем неподвижного кулачка и вращательное от взаимодействия с кривошипом. При этом выходные звенья исполнительного механизма с губками совершают непрерывное круговое движение без каких-либо выстоев на границах рабочего и холостого ходов, т.е. без выстоев в позициях "схват изделия" и "выдача изделия". Это снижает точность работы механизма, поскольку ухудшается взаимодействие губок с изделием в моменты начала и конца рабочего хода. Указанный недостаток лимитирует повышение производительности устройства.
Задачей настоящего изобретения является повышение точности работы механизма и частоты повторения рабочих циклов.
Решение поставленной задачи достигается тем, что в комбинированном механизме со сложным движением выходных звеньев, содержащем передаточный механизм с кинематически связанными ведущим и выходным звеньями, исполнительный механизм с выходными звеньями, в котором последние снабжены губками для захвата изделий, ведущим звеном является выходное звено передаточного механизма, стойку и привод, кинематическая связь ведущего и выходного звеньев передаточного механизма содержит промежуточные звенья, выполненные в виде толкателя и поворотной направляющей, при этом толкатель сопряжен с ведущим звеном и шарнирно связан с выходным звеном, поворотная направляющая подвижно соединена с выходным звеном и шарнирно связана со стойкой.
Передаточный механизм выполнен в виде многозвенного кулачково-рычажного механизма с ведущим кулачком и центрально расположенным толкателем, при этом механизм удовлетворяет зависимости
W=3·n-2p5-p4=3·4-2·5-1=1,
где W - степень подвижности механизма, W=1;
n - число подвижных звеньев, n=4;
р5 - число низших кинематических пар, p5=5;
р4 - число высших кинематических пар, р4=1.
Выходное звено передаточного механизма выполнено двуплечим, при этом на одном из плеч закреплен палец для шарнирной связи с выходными звеньями исполнительного механизма, другое плечо подвижно связано с поворотной направляющей, а в месте сопряжения упомянутых плеч выполнено сквозное отверстие для шарнирной связи выходного звена с толкателем посредством закрепленного на толкателе пальца.
Поворотная направляющая выполнена в виде пустотелой призмы со сквозным продольным отверстием, размеры и форма которого в поперечном сечении соответствуют размерам и форме поперечного сечения плеча выходного звена, взаимодействующего с направляющей, на боковине призмы закреплен палец для шарнирной связи ее со стойкой.
Выходное звено передаточного механизма совершает движение, которое генерируется посредством кулачка, толкателя и поворотной направляющей и соответствует зависимости
где γ - полный угол размаха выходного звена;
h - расстояние между границами интервалов движения толкателя: полный ход толкателя;
l - отстояние оси поворотной направляющей от линии хода толкателя.
Расстояние между крайними положениями пальца шарнирной связи выходных звеньев передаточного и исполнительного механизмов соответствует зависимости

где Н - расстояние между положениями упомянутого пальца на границах интервалов движения;
S - длина плеча выходного звена передаточного механизма с пальцем для шарнирной связи.
Включение промежуточных звеньев в виде толкателя и поворотной направляющей в кинематическую связь ведущего и выходного звеньев передаточного механизма обеспечивает движение выходного звена передаточного механизма, которое является ведущим звеном исполнительного механизма, и соответственно выходных звеньев исполнительного механизма с выстоями на границах интервалов движения, т.е. в позициях "схват изделия" и "выдача изделия". Это повышает точность работы комбинированного механизма.
Выполнение ведущего звена передаточного механизма в виде кулачка, толкатель которого шарнирно связан с выходным звеном, позволяет обеспечивать на границах ходов толкателя и выходного звена не только мгновенные выстои, связанные с изменением направления их движения, но и выстои любой требуемой продолжительности. Последнее обеспечивается при постоянных радиус-векторах кулачка на соответствующих участках профиля. При центральном расположении толкателя упрощается изготовление кулачка с симметричными профилями в интервалах прямого (рабочего) и обратного (холостого) ходов толкателя. Многозвенный кулачково-рычажный передаточный механизм удовлетворяет формуле Чебышева. Он соответствует структурной формуле кинематической цепи - первому условию работоспособности.
При выполнении выходного звена передаточного механизма двуплечим, шарнирно связанным с толкателем и подвижно соединенным с поворотной направляющей, обеспечивается движение выходных звеньев исполнительного механизма по криволинейной траектории, центр кривизны которой занимает фиксированное положение, совпадая с осью поворотной направляющей, а расстояние от упомянутого центра до точек на кривой изменяется, достигая максимального значения на границах ходов выходного звена. Длина кривой между ее конечными точками зависит от величины хода толкателя, длины плеча выходного звена передаточного механизма, несущего выходные звенья с губками, и отстояния оси поворота направляющей от линии хода толкателя. Выполнение шарнирной связи выходного звена передаточного механизма с толкателем посредством пальца является наиболее простым, технологичным и надежным конструктивным решением.
Выполнение поворотной направляющей в виде пустотелой призмы со сквозным продольным отверстием, формы и размеры которого в сечении соответствуют форме и размерам плеча выходного звена, взаимодействующего с призмой, обеспечивает возможность движения выходного звена относительно призмы без перекосов и заклинивания. Применение пальца в шарнирной связи поворотной направляющей со стойкой является наиболее простым и надежным решением.
Формула (1) определяет величину поворотного движения выходного звена передаточного механизма в функции двух аргументов: хода h толкателя и отстояния l оси поворота направляющей от линии хода толкателя. Варьируя аргументами h и l, можно обеспечить требуемый угол размаха выходного звена.
Формула (2) определяет расстояние между положениями концевых точек выходных звеньев исполнительного механизма на границах интервалов движения, т.е. длину хорды между крайними точками на траектории движения пальца в шарнирной связи выходных звеньев передаточного и исполнительного механизмов. Зная угол γ размаха выходного звена передаточного механизма и отстояние l оси поворотной направляющей, смотри формулу (1), варьируя длину S плеча выходного звена, можно вычислить фактическую длину хорды H. Необходимая длина Н может быть известна по технологическим и конструктивным требованиям, тогда следует определить искомую длину S плеча по формуле, вытекающей из зависимости (2)
Предлагаемый механизм поясняется чертежами.
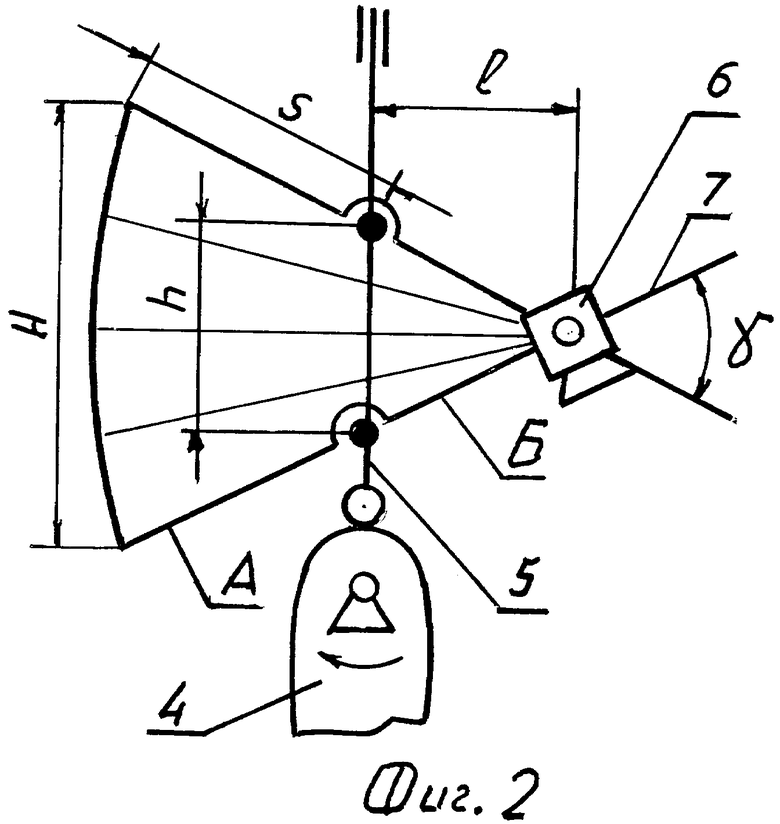
На фиг.1 представлена кинематическая схема механизма; на фиг.2 - схема к расчету параметров движения выходных звеньев.
Комбинированный механизм со сложным движением выходных звеньев содержит передаточный механизм 1, исполнительный механизм 2 с губками 3 для захвата изделий и привод (последний на чертеже не показан).
Механизм 1 выполнен в виде многозвенного кулачково-рычажного механизма, который включает ведущее звено - кулачок 4, промежуточные звенья - толкатель 5, сопряженный с кулачком, и поворотную направляющую 6, шарнирно связанную со стойкой, и выходное звено 7, шарнирно связанное с толкателем и подвижно соединенное с поворотной направляющей.
Толкатель 5 выполнен с нулевым эксцентриситетом, на конце толкателя смонтирован ролик 8 для взаимодействия с профилем кулачка. Поворотная направляющая 6 представляет собой пустотелую призму со сквозным продольным отверстием для подвижного соединения с выходным звеном 7. Форма и размеры отверстия в поперечном сечении соответствуют форме и размерам сечения выходного звена. Призма снабжена пальцем 9, жестко закрепленным на ее боковине, для связи со стойкой. Выходное звено 7 выполнено двуплечим, при этом плечо А связано с механизмом 2, а плечо Б подвижно соединено с поворотной направляющей, в месте сопряжения плеч А и Б выходное звено имеет сквозное отверстие для шарнирной связи с толкателем 5 посредством пальца 10. Длина плеча А равна расстоянию от пальца 10 до точки связи плеча с механизмом 2. Длина плеча Б изменяется, ее текущее значение равно расстоянию между пальцами 9 и 10.
Исполнительный механизм 2 выполнен в виде рычажно-кулачкового механизма, содержащего ведущее звено, которым является выходное звено передаточного механизма, выходные звенья 11 и 12 с губками 3 для захвата изделий и неподвижный кулачок - копир 13.
Выходные звенья 11 и 12 шарнирно связаны с выходным звеном передаточного механизма посредством пальца 14, закрепленного на свободном конце плеча А. На концах выходных звеньев 11 и 12 смонтированы ролики соответственно 15 и 16 для взаимодействия с фигурными пазами 17 и 18 в теле неподвижного копира 13.
Губки для захвата изделий выполнены по форме передаваемых изделий, при этом закрепление губок на выходных звеньях 11 и 12 выполнено жестким, но разъемным. Это обеспечивает быструю смену губок при переналадке механизма на передачу изделий другой формы.
Фигурные пазы 17 и 18 в теле копира 13 генерируют взаимное положение выходных звеньев 11 и 12 в интервалах движения, при этом на границах интервалов, т.е. в позициях "схват изделия" и "выдача изделия", губки, имитирующие движение выходных звеньев, занимают разжатое положение.
Комбинированный механизм со сложным движением выходных звеньев работает следующим образом.
При работе привода вращение кулачка 4 преобразуется в возвратно-поступательное движение толкателя 5, при этом выходное звено 7 передаточного механизма совершает возвратно-поворотное движение с углом размаха γ (фиг.2) и центром качания, расположенным на оси пальца 9.
В интервале поворота звена 7 на угол γ палец 14 плеча А, несущий выходные звенья 11 и 12 исполнительного механизма, перемещается по криволинейной траектории, представляющей собой геометрическое место точек с общим центром кривизны, занимающим фиксированное положение на оси пальца 9, а расстояние от упомянутого центра до точек на кривой изменяется, достигая максимального значения на границах ходов толкателя 5 и соответственно выходного звена 7. Следует, что при постоянной длине плеча А, т.е. при S=const, и фиксированном положении центра качания выходного звена передаточного механизма траектория движения пальца 14 и выходных звеньев исполнительного механизма не является кривой одного радиуса. Расстояние Н между крайними точками траектории движения пальца 14 определяется зависимостью (2).
При движении выходного звена 7 генерируется движение выходных звеньев 11 и 12 исполнительного механизма. Ролики 16 и 17 выходных звеньев, взаимодействуя с фигурными пазами 17 и 18 в теле копира 13, обеспечивают текущее положение выходных звеньев с губками 3 для захвата изделий, при этом на границах ходов губки находятся в разжатом положении, а при выполнении ходов губки сжаты.
В позиции "схват изделия" в разжатые губки подается изделие (объект манипулирования). В момент начала рабочего хода губки сжимаются и, контактируя с изделием по большей части его периметра, надежно удерживают изделие, переносимое из одной позиции в другую. В позиции "выдача изделия" губки разжимаются и изделие выводится из механизма. При обратном ходе губки также занимают сжатое положение, поскольку ролики 16 и 17 взаимодействуют с теми же фигурными пазами, что и при прямом ходе.
Предлагаемый комбинированный механизм обеспечивает транспортировку изделия из позиции в позицию по траектории близкой к прямолинейной, при этом увеличение длины плеча А выходного звена увеличивает прямолинейность траектории. Движение губок по прямой во многих случаях повышает точность передачи изделий.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2356725C1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2356726C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2003 |
|
RU2247021C1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2344031C2 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2006 |
|
RU2303520C1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2346804C2 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2266192C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2191109C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2265511C1 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2006 |
|
RU2312008C1 |
Изобретение относится к средствам обслуживания машин и оборудования, обеспечивающим захват изделия и его перемещение из одной позиции в другую. Механизм содержит передаточный механизм с кинематически связанными ведущим и выходным звеньями и исполнительный механизм с выходными звеньями, имеющими губки для захвата изделий, ведущим звеном которого является выходное звено передаточного механизма, и неподвижным копиром. Кинематическая связь ведущего и выходного звеньев передаточного механизма содержит промежуточные звенья, выполненные в виде толкателя и поворотной направляющей. Толкатель сопряжен с ведущим звеном и шарнирно связан с выходным звеном, поворотная направляющая подвижно соединена с выходным звеном и шарнирно связана со стойкой. Ведущим звеном передаточного механизма является кулачок, толкатель сопряженный с кулачком выполнен с нулевым эксцентриситетом и снабжен роликом для взаимодействия с профилем кулачка. Выходные звенья исполнительного механизма шарнирно связаны с выходным звеном передаточного механизма и снабжены роликами для взаимодействия с фигурными пазами в теле копира. Изобретение позволяет повысить точность работы и частоту повторения рабочих циклов. 5 з.п. ф-лы, 2 ил.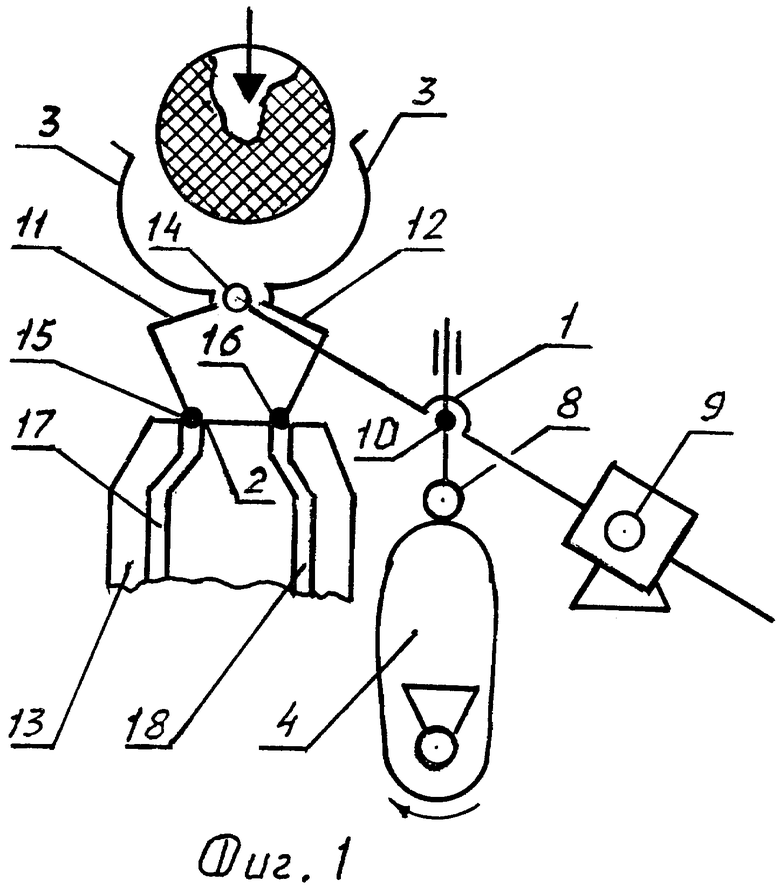
W=3·n-2p5-p4=3·4-2·5-1=1,
где W - степень подвижности механизма, W=1;
n - число подвижных звеньев, n=4;
р5 - число низших кинематических пар, p5=5;
р4 - число высших кинематических пар, р4=1.
где h - расстояние между границами интервалов движения толкателя - полный ход толкателя;
 отстояние оси поворотной направляющей от линии хода толкателя.
отстояние оси поворотной направляющей от линии хода толкателя.

где Н - расстояние между положениями упомянутого пальца на границах интервалов движения;
S - длина плеча выходного звена передаточного механизма с пальцем для шарнирной связи;
γ - полный угол размаха выходного звена,
отстояние оси поворотной направляющей от линии хода толкателя.
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2265510C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2265511C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2266192C1 |
| US 5539291 A, 23.07.1996 | |||
| US 5885052 A, 23.03.1999. | |||

