Предлагаемое изобретение относится к комбинированным механизмам со сложным движением выходных звеньев, применяемым для выполнения вспомогательных операций при обслуживании машин, станков, прессов и другого оборудования. Такие манипуляционные механизмы, имитируя определенные движения рук человека, обеспечивают захват изделия (объекта манипулирования), его перемещение из одной позиции в другую, освобождение и передачу изделия.
Известно, например, манипуляционное устройство, обеспечивающее захват изделия, его перемещение по дуге окружности и освобождение, содержащее исполнительный механизм с губками для захвата изделий, механизм поворота и гидропривод (Крайнев А.Ф. Словарь-справочник по механизмам. - М.: Машиностроение, 1987. - С.9 и 10, рис. а).
Основным недостатком данного устройства является усложненность привода и малая частота повторения рабочих циклов, т.е. невысокая производительность. Указанный недостаток является результатом использования отдельных двигателей для механизмов захвата и поворота, а также применения тихоходного гидравлического привода. Недостаток особенно ощутим при агрегатировании устройства с машинами-автоматами и линиями высокой производительности.
Известно также устройство типа «рука» для передачи изделий, выполненное в виде комбинированного механизма, содержащего подвижное основание, исполнительный механизм с губками для захвата изделий, механизм поворота подвижного основания, и привода (патент РФ №2179505, опубл. в БИПМ, 2002. - №5 - прототип).
Основным недостатком прототипа являются невысокие производительность и точность функционирования. Это связано с наличием системы гибкой связи для синхронизации движения ведущих звеньев, сравнительно большим числом подвижных элементов и кинематических пар в цепи исполнительного механизма. Увеличенное число подвижных звеньев лимитирует частоту повторения рабочих циклов, снижая производительность, а зазоры в кинематических парах, при большом числе последних, и наличие гибких элементов не способствуют обеспечению высокой точности.
Задачей настоящего изобретения является повышение производительности и точности работы устройства.
Решение поставленной задачи достигается тем, что в устройстве типа «рука» для передачи изделий, содержащем комбинированный механизм, выполненный в виде передаточного механизма с выходным звеном и исполнительного механизма с выходными звеньями и губками для захвата изделий, и привод, выходное звено передаточного механизма является ведущим звеном исполнительного механизма, выходные звенья последнего шарнирно соединены с выходным звеном передаточного механизма и дополнительно кинематически с ним связаны.
Передаточный механизм выполнен в виде механизма с качающейся кулисой, который содержит ведущее звено-кривошип, жестко закрепленный на валу привода, выходное звено-кулису и промежуточное звено-ползун, шарнирно связанный с кривошипом и подвижно сопряженный с кулисой.
Шарнирное соединение выходных звеньев исполнительного механизма с выходным звеном передаточного механизма содержит палец, жестко закрепленный на свободном конце кулисы.
Дополнительная кинематическая связь выходных звеньев исполнительного механизма с выходным звеном передаточного механизма содержит дополнительный ползун, подвижно сопряженный с выходным звеном, шатуны, каждый из которых шарнирно связан с дополнительным ползуном и соответствующим выходным звеном, и неподвижные копиры с фигурными профилями для взаимодействия с дополнительным ползуном.
Губки для захвата изделий жестко закреплены на выходных звеньях исполнительного механизма, при этом упомянутое закрепление губок выполнено разъемным.
Дополнительный ползун выполнен в виде призмы с прямоугольным сквозным отверстием для сопряжения с выходным звеном передаточного механизма, при этом призма выполнена разъемной по длине, состоящей из двух жестко связанных частей, на одной из них жестко закреплен палец для шарнирной связи с шатунами дополнительной кинематической связи, на другой смонтирован ролик для взаимодействия с неподвижными копирами.
Сопряжение дополнительного ползуна с выходным звеном содержит упругий элемент, выполненный в виде пружины сжатия, при этом один конец пружины закреплен на выходном звене, другой - сопряжен с ползуном для фиксирования последнего в крайнем положении, которому соответствует сжатое положение губок.
Выходное звено передаточного механизма имеет в поперечном сечении прямоугольную форму, при этом размеры прямоугольника соответствуют размерам сечения сквозного отверстия в дополнительном ползуне.
Неподвижные копиры с фигурными профилями размещены на границах интервалов движения выходного звена передаточного механизма, при этом копиры жестко закреплены на неподвижных стойках.
Дополнительный ползун и выходные звенья в интервалах рабочего и холостого ходов занимают фиксированное положение относительно выходного звена передаточного механизма, при этом пружина фиксирует дополнительный ползун в крайнем положении, а на границах интервалов движения дополнительный ползун и выходные звенья совершают движение относительно выходного звена, при этом ролик дополнительного ползуна взаимодействует с фигурным профилем соответствующего неподвижного копира.
Комбинированный механизм удовлетворяет условиям:
При рабочем и холостом ходах соответственно
W=3·n-2p5-p4=3·3-2·4-0=1, (1)
где W - число степеней свободы каждого из выходных звеньев, W=1;
n - число подвижных звеньев: кривошип, ползун, кулиса, n=3;
р5 - число низших кинематических пар, р5=4;
р4 - число высших кинематических пар, р4=0.
При нахождении на границах интервалов движения соответственно
W=3·n-2p5-p4=3·6-2·8-1=1, (2)
где W - число степеней свободы каждого из выходных звеньев относительно кулисы, W=1;
n - число подвижных звеньев: кривошип, ползун, кулиса, дополнительный ползун, шатун, выходное звено, n=6;
р5=8; р4 - число высших кинематических пар: сопряжение ролика дополнительного ползуна с фигурным профилем неподвижного копира, р4=1.
Заявляемое устройство отличается от прототипа сочетанием конструктивных элементов и наличием связи между ними, обеспечивающими в совокупности упрощение конструкции, повышение производительности и точности функционирования. В предлагаемом устройстве выходное звено передаточного механизма выполняет функцию ведущего звена исполнительного механизма. Это дало возможность исключить из схемы устройства подвижное основание и механизм поворота последнего. При этом упрощена конструкция, поскольку уменьшено число подвижных звеньев и кинематических пар. Кроме того, в предлагаемом устройстве нет системы гибкой связи между приводом и исполнительным механизмом. Это способствует повышению точности работы устройства.
Выполнение выходного звена передаточного механизма в качестве ведущего звена исполнительного механизма уменьшает число подвижных звеньев и кинематических пар. Это упрощает конструкцию, повышает точность работы устройства, дает возможность увеличить частоту повторения рабочих циклов и повысить производительность. Шарнирное соединение выходных звеньев исполнительного механизма с выходным звеном передаточного механизма и наличие дополнительной кинематической связи между упомянутыми звеньями в совокупности обеспечивают поворотное движение выходных звеньев с выстоями относительно выходного звена передаточного механизма. В результате губки для захвата изделий, жестко закрепленные на выходных звеньях, занимают необходимое разжатое или сжатое положение. При такой кинематической связи процесс разжатия или сжатия губок выполняется с высокой геометрической точностью.
Выполнение передаточного механизма в виде механизма с качающейся кулисой имеет свои преимущества: благоприятную функцию угла передачи в периоде кинематического цикла, определяющую силовую работоспособность механизма, и большой угол размаха выходного звена. В таких механизмах коэффициент соотношения интервалов рабочего и холостого ходов достигает значения К=1,6. Это расширяет технологические возможности устройства, т.е. возможность использования устройства при значительном отстоянии одна от другой позиций «схват изделия» и «выдача изделия».
Применение пальца для шарнирной связи выходных звеньев исполнительного механизма с выходным звеном передаточного механизма является наиболее простым и технологичным решением, обеспечивающим простоту сборки и разборки, а также необходимую точность сопряжения.
Дополнительная кинематическая связь выходных звеньев исполнительного механизма с выходным звеном передаточного механизма, включающая дополнительный ползун, шатуны и копиры с фигурными профилями, призвана обеспечивать необходимую точность поворотного движения с выстоями выходных звеньев относительно выходного звена. Такая связь звеньев обеспечивает достаточную точность функционирования губок в периоде кинематического цикла.
Жесткое закрепление губок на выходных звеньях исполнительного механизма вызвано тем, что губки должны имитировать движение выходных звеньев. Выполнение упомянутого закрепления разъемным вызвано тем, что такое закрепление обеспечивает возможность быстрой смены губок при переналадке устройства на передачу изделий другой формы.
Выполнение дополнительного ползуна в виде призмы и его сопряжение с выходным звеном посредством сквозного отверстия исключает возможность радиального разворота ползуна относительно продольной оси выходного звена. При этом не возникает паразитных нагрузок от перекоса ползуна, повышается точность его движения. Разъемное выполнение ползуна обеспечивает необходимую технологичность его сборки и разборки.
Выполнение сопряжения дополнительного ползуна с выходным звеном передаточного механизма посредством упругого элемента в виде пружины сжатия, которая одним концом закреплена на выходном звене, а другим взаимодействует с дополнительным ползуном, обеспечивает надежное положение ползуна в крайнем положении в интервалах движения выходного звена в интервалах движения выходного звена между позициями «схват изделия» и «выдача изделия». При этом обеспечивается необходимое сжатое положение губок. При нахождении выходного звена на границе интервалов движения ролик дополнительного ползуна, взаимодействуя с фигурным профилем неподвижного копира, возвращает ползун в другое крайнее положение, преодолевая действие пружины сжатия. В результате губки занимают разжатое положение. Как следует, механизм перемещения дополнительного ползуна по выходному звену достаточно прост.
Соответствие поперечного сечения выходного звена передаточного механизма сечению сквозного отверстия в дополнительном ползуне обеспечивает связь этих звеньев при минимальных зазорах в сопряжении. Это повышает точность работы.
Размещение неподвижных копиров на границах интервалов движения выходного звена определяется циклограммой работы устройства, в соответствии с которой на границах интервалов дополнительный ползун обеспечивает сжатое положение пружины и соответственно разжатое положение губок.
Фиксированное положение дополнительного ползуна, шатунов и выходных звеньев исполнительного механизма относительно выходного звена в интервале движения последнего является благоприятным для обеспечения точности взаимодействия губок с изделием. Кроме того, снижаются энергозатраты, связанные с движением звеньев относительно друг друга.
При рабочем и холостом ходах комбинированного механизма задействовано три подвижных звена: кривошип, промежуточное звено и кулиса передаточного механизма, остальные звенья занимают фиксированное положение относительно кулисы. Вблизи любой из границ интервалов движения задействовано шесть подвижных звеньев: кривошип, ползун, кулиса, дополнительный ползун, шатун, выходное звено. При этом обеспечивается сжатие или разжатие губок. Формулы (1), (2) характеризуют работоспособность механизмов, составляющих комбинированный многозвенный механизм.
Предлагаемое устройство типа «рука» для передачи изделий поясняется чертежом.
На чертеже представлена кинематическая схема устройства.
Устройство содержит комбинированный механизм 1, выполненный в виде передаточного механизма 2, исполнительного механизма 3 с губками 4 для захвата изделий, и привод 5.
Механизм 2 включает ведущее звено 6, выполненное в виде кривошипа, жестко закрепленного на валу привода 5, выходное звено 7 в виде кулисы и промежуточное звено - ползун 8, шарнирно связанный с кривошипом и подвижно сопряженный с кулисой.
Механизм 3 включает ведущее звено, функцию которого выполняет кулиса 7 передаточного механизма, выходные звенья 9 и 10, шарнирно связанные с кулисой, промежуточные звенья в виде дополнительного ползуна 11, подвижно сопряженного с кулисой, шатунов 12 и 13, каждый из которых шарнирно связан с дополнительным ползуном и соответствующим выходным звеном, и пружины 14 сжатия, один конец которой закреплен на кулисе, другой - сопряжен с дополнительным ползуном, и неподвижные копиры 15 и 16 с фигурными профилями 17 и 18, жестко закрепленные на неподвижных стойках.
Шарнирная связь выходных звеньев 9 и 10 с кулисой 7 содержит палец 19, жестко закрепленный на свободном конце кулисы. Дополнительный ползун 11 выполнен в виде призмы с прямоугольным сквозным отверстием 20. Призма выполнена разъемной по длине, состоящей из двух жестко связанных частей 21 и 22, на которых соответственно жестко закреплен палец 23 для шарнирной связи с шатунами 12 и 13, и смонтирован ролик 24 для взаимодействия с фигурными профилями неподвижных копиров.
Губки 4 для захвата изделий жестко закреплены на выходных звеньях 9 и 10, крепление губок выполнено разъемным. Форма губок соответствует форме передаваемых изделий. Кулиса 7 в поперечном сечении имеет прямоугольную форму, соответствующую форме сквозного отверстия 20 в теле дополнительного ползуна 11.
Устройство типа «рука» для передачи изделий работает следующим образом.
При работе привода 5 вращение кривошипа 6 преобразуется посредством ползуна 8 в возвратно-поворотное движение кулисы 7. В интервалах движения кулисы 7 пружина 14, воздействуя на дополнительный ползун 11, фиксирует его в крайнем положении, при этом шатуны 12 и 13 и выходные звенья 9 и 10 обеспечивают сжатое положение губок 4.
При нахождении кулисы 7 на любой из границ интервалов движения ролик 24 взаимодействует с фигурным профилем 17 или 18 соответствующего неподвижного копира, в результате чего дополнительный ползун 11, преодолевая действие пружины 14, приходит в другое крайнее положение. При этом губки 4 занимают посредством шатунов 12 и 13 и выходных звеньев 9 и 10 разжатое положение.
В интервале рабочего хода устройства губки 4 удерживают изделие, переносимое из одной позиции в другую. По завершении рабочего хода губки разжимаются и перестают удерживать изделие, при этом последнее выводится из устройства. Холостой ход выполняется аналогично рассмотренному, но при отсутствии изделия.
Предложенное устройство в сравнении с прототипом позволяет упростить конструкцию, повысить производительность и точность работы.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2265509C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2191108C1 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2006 |
|
RU2303520C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2265511C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2276009C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2236343C2 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2224639C2 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2006 |
|
RU2331507C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2266192C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2009 |
|
RU2412046C2 |
Изобретение относится к комбинированным механизмам со сложным движением выходных звеньев. Устройство содержит комбинированный механизм, выполненный в виде передаточного механизма с выходным звеном и исполнительного механизма с ведущим звеном и выходными звеньями с губками для захвата изделий, и привод. Ведущим звеном исполнительного механизма является выходное звено передаточного механизма. Выходные звенья исполнительного механизма шар-нирно соединены с выходным звеном передаточного механизма и дополнительно кинематически с ним связаны. Дополнительная кинематическая связь содержит дополнительный ползун, подвижно сопряженный с выходным звеном, шатуны, каждый из которых шарнирно связан с дополнительным ползуном и соответствующим выходным звеном, и неподвижные копиры с фигурными профилями для взаимодействия с дополнительным ползуном. Сопряжение дополнительного ползуна с выходным звеном содержит упругий элемент, выполненный в виде пружины сжатия. При этом один конец пружины закреплен на выходном звене, другой - сопряжен с ползуном для фиксирования последнего в крайнем положении, которому соответствует сжатое положение губок. Изобретение позволит упростить конструкцию, повысить точность работы и производительность устройства. 10 з.п. ф-лы, 1 ил.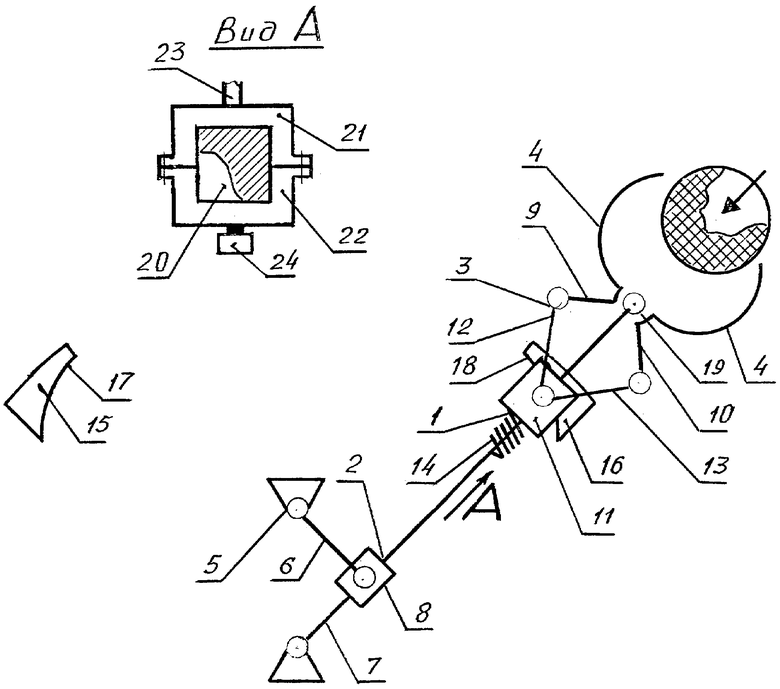
при рабочем и холостом ходах соответственно
W=3·n-2p5-p4=3·3-2·4-0=1,
где W - число степеней свободы каждого из выходных звеньев, W=1;
n - число подвижных звеньев, n=3;
р5 - число низших кинематических пар, р5=4;
р4 - число высших кинематических пар, р4=0.
на границах интервалов движения соответственно
W=3·n-2p5-p4=3·6-2·8-1=1,
где W - число степеней свободы каждого из выходных звеньев относительно кулисы, W=1;
n - число подвижных звеньев, n=6; р5=8; р4=1.
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2191107C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2191109C1 |
| US 5885052 A, 23.03.1999. | |||

