Предлагаемое изобретение относится к комбинированным механизмам со сложным движением выходных звеньев, применяемым для выполнения вспомогательных операций при обслуживании машин, станков, прессов и другого оборудования. Такие манипуляционные механизмы, имитируя определенные движения рук человека, обеспечивают захват изделия (объекта манипулирования), его перемещение из одной позиции в другую, освобождение и передачу изделия.
Известно, например, манипуляционное устройство, обеспечивающее захват изделия, его перемещение по дуге окружности и освобождение, содержащее исполнительный механизм с губками для захвата изделий, механизм поворота и гидропривод (Крайнев А.Ф. Словарь-справочник по механизмам. - М.: Машиностроение, 1987. - С.9 и 10, рис.а).
Основным недостатком данного устройства является усложненность привода и малая частота повторения рабочих циклов, т.е. невысокая производительность. Указанный недостаток является результатом использования отдельных двигателей для механизмов захвата и поворота, а также применения тихоходного гидравлического привода. Недостаток особенно ощутим при агрегатировании устройства с машинами-автоматами и линиями высокой производительности.
Известно также устройство типа «рука» для передачи изделий, выполненное в виде комбинированного механизма, содержащего передаточный механизм с ведущим и выходным звеньями, исполнительный механизм с выходными звеньями и губками для захвата изделий и привод (патент РФ №2191107 , опубл. в БИПМ, 2002. - №29 - прототип).
Основным недостатком прототипа являются невысокая точность работы исполнительного механизма, несущего губки для захвата изделий, и ограниченная частота повторения рабочих циклов, т.е. невысокая производительность. Это связано с интенсивным износом рабочих профилей в фигурных пазах передаточного механизма. Износ профилей снижает точность функционирования губок, уменьшает надежность «схвата изделий» при передаче, вызывая внецикловые простои.
Задачей настоящего изобретения является упрощение конструкции, повышение производительности и точности работы устройства.
Решение поставленной задачи достигается тем, что в устройстве типа «рука» для передачи изделий, содержащем комбинированный механизм, выполненный в виде передаточного механизма с выходным звеном, исполнительного механизма с ведущим звеном, которым является выходное звено передаточного механизма, и выходными звеньями, кинематически связанными с выходным звеном передаточного механизма и снабженными губками для захвата изделий, и привод, кинематическая связь содержит ползун, подвижно сопряженный с выходным звеном передаточного механизма, шатуны, каждый из которых шарнирно связан с ползуном и соответствующим выходным звеном, и силовой упругий элемент в виде пружины сжатия, выходное звено передаточного механизма с выходными звеньями исполнительного механизма связаны также шарнирно.
Передаточный механизм выполнен в виде механизма со сложным движением кулисы, который содержит ведущее звено - кривошип, закрепленный на валу привода, выходное звено - кулису, шарнирно связанную с кривошипом, и поворотную направляющую, подвижно сопряженную с кулисой и шарнирно связанную со стойкой, при этом механизм удовлетворяет условию

где W - степень подвижности механизма, W=1;
n - число подвижных звеньев: кривошип, кулиса, поворотная направляющая, n=3;
р5 - число низших кинематических пар, р5=4;
р4 - число высших кинематических пар, р4=0.
Шарнирная связь выходных звеньев исполнительного механизма с выходным звеном передаточного механизма содержит палец, жестко закрепленный на свободном конце выходного звена передаточного механизма.
Губки для захвата изделий жестко закреплены на выходных звеньях исполнительного механизма, при этом упомянутое закрепление губок выполнено разъемным.
Пружина сжатия одним концом закреплена на выходном звене передаточного механизма, другим сопряжена с ползуном, при этом ползун выполнен с возможностью взаимодействия с поворотной направляющей передаточного механизма.
Ползун выполнен в виде призмы со сквозным центральным отверстием для сопряжения с выходным звеном передаточного механизма, при этом отверстие имеет в сечении прямоугольную форму, а призма выполнена разъемной по длине, состоящей из двух жестко связанных элементов.
Выходное звено передаточного механизма имеет в поперечном сечении прямоугольную форму, при этом размеры прямоугольника соответствуют размерам сечения центрального отверстия в ползуне.
Границы интервалов движения комбинированного механизма соответствуют положениям звеньев передаточного механизма, при которых кривошип перпендикулярен выходному звену передаточного механизма, при этом в интервале рабочего хода губки занимают сжатое положение, а в интервале холостого - разжатое.
Заявляемое устройство отличается от прототипа сочетанием конструктивных элементов и характером связи между ними, которые в совокупности обеспечивают упрощение конструкции, повышение производительности и точности функционирования. В предлагаемом устройстве выходное звено передаточного механизма является ведущим звеном исполнительного механизма, но в отличие от прототипа кинематическая связь выходных звеньев исполнительного механизма с выходным звеном передаточного механизма содержит преимущественно шарнирные связи. Это повышает надежность работы устройства при передаче изделий увеличенной массы. Кроме того, предлагаемое устройство реализует холостые ходы при разжатом положении губок. Это уменьшает энергозатраты, связанные с поворотным движением выходных звеньев с губками относительно выходного звена передаточного механизма.
При выполнении кинематической связи выходных звеньев исполнительного механизма с выходным звеном передаточного механизма путем использования ползуна, подвижно связанного с выходным звеном, шатунов, шарнирно связанных с ползуном и выходными звеньями, и силового упругого элемента в виде пружины сжатия исключается необходимость применения кинематических пар с трением качения. Это повышает силовую работоспособность устройства и надежность работы при силовом нагружении.
Выполнение передаточного механизма в виде механизма со сложным движением кулисы имеет свои преимущества: обеспечивается большой угол размаха выходного звена, несущего выходные звенья с губками для захвата изделий, большое значение коэффициента соотношения интервалов движения при рабочем и холостом ходах, который достигает значения К=1,6. Большой угол размаха предпочтителен для использования устройства при увеличенном отстоянии одна от другой позиций «схват изделия» и «выдача изделия». Большое значение коэффициента соотношения интервалов движения предопределяет меньшую скорость движения при рабочем ходе в сравнении с холостым ходом. Это снижает расход мощности на передачу изделий.
Применение пальца для шарнирной связи выходных звеньев исполнительного механизма с выходным звеном передаточного механизма является наиболее предпочтительным решением, обеспечивающим технологичность сборки и разборки и необходимую точность связи кинематических пар.
Жесткое закрепление губок на выходных звеньях исполнительного механизма вызвано тем, что губки должны имитировать движение выходных звеньев. Выполнение упомянутого закрепления разъемным вызвано тем, что такое закрепление обеспечивает возможность быстрой смены губок при переналадке устройства на передачу изделий другой формы.
Фиксированное соединение одного конца пружины сжатия с выходным звеном передаточного механизма и сопряжение другого конца пружины с ползуном обеспечивает взаимодействие ползуна с поворотной направляющей в интервале рабочего хода устройства, при этом текущее положение ползуна на выходном звене определяет соответствующее текущее положение шатунов и выходных звеньев с губками. Таким образом, пружина обеспечивает необходимое положение ползуна на выходном звене при поступательном движении последнего.
Выполнение ползуна, в виде призмы и его взаимодействие с выходным звеном посредством сквозного отверстия прямоугольного сечения исключает возможность радиального разворота ползуна относительно продольной оси выходного звена, при этом не возникает паразитных нагрузок от перекоса ползуна, повышается точность его движения. Разъемное выполнение ползуна обеспечивает необходимую технологичность его сборки и разборки.
Соответствие поперечного сечения выходного звена сечению сквозного отверстия в ползуне обеспечивает связь этих звеньев при минимальных зазорах в сопряжении.
При положении кривошипа перпендикулярно выходному звену последнее занимает положение на одной из границ интервалов движения. Угол между положениями кривошипа на границах интервалов определяет интервалы его движения при рабочем и холостом ходах выходного звена. Выходное звено передаточного механизма совершает сложное движение, состоящее из поворотного и поступательного движений, при этом ползун и пружина кинематической связи передаточного и исполнительного механизмов при поступательном движении кулисы обеспечивают сжатое или разжатое положение губок. Благоприятно, что в интервале рабочего хода выходного звена обеспечивается сжатое положение губок, а в интервале холостого - разжатое. Границы интервалов движения выходного звена являются границами сжатия и разжатия губок.
Предлагаемое устройство типа «рука» для передачи изделий поясняется чертежом.
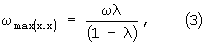
На чертеже представлена кинематическая схема устройства.
Устройство содержит комбинированный механизм 1, выполненный в виде передаточного механизма 2 и исполнительного механизма 3 с губками 4 для захвата изделий, и привод 5.
Механизм 2 включает ведущее звено 6, выполненное в виде кривошипа, жестко закрепленного на валу привода 5, выходное звено 7 в виде кулисы, шарнирно связанной с кривошипом, и поворотную направляющую 8, подвижно сопряженную с кулисой и шарнирно связанную со стойкой. Коэффициент соотношения интервалов ходов механизма 2 удовлетворяет условию

Здесь К - коэффициент соотношения интервалов рабочего и холостого ходов, ϕр и ϕх - угол поворота кривошипа соответственно при рабочем и холостом ходе, τр и τх - время соответственно рабочего и холостого хода.
Механизм 3 содержит ведущее звено, которым является выходное звено 7 передаточного механизма, выходные звенья 9 и 10, шарнирно связанные с выходным звеном, промежуточные звенья в виде ползуна 11, подвижно сопряженного с выходным звеном, шатунов 12 и 13, шарнирно связанных с ползуном и соответственно с выходными звеньями 9 и 10. Кроме того, механизм 3 включает силовой упругий элемент 14 в виде пружины сжатия, смонтированной на выходном звене, один конец пружины закреплен на упомянутом выходном звене, другой ее конец сопряжен с ползуном 11, периодически взаимодействующим с поворотной направляющей 8.
Шарнирная связь выходных звеньев 9 и 10 с выходным звеном 7 содержит палец 15, жестко закрепленный на свободном конце выходного звена. Ползун 11 выполнен в виде призмы с продольным сквозным отверстием 16 прямоугольного сечения. Призма выполнена разъемной по длине, состоящей из двух жестко связанных элементов 17 и 18, на элементе 17 закреплен палец 19 для шарнирной связи с шатунами 12 и 13. Поворотная направляющая 8 шарнирно связана с пальцем 20, жестко закрепленным на стойке.
Губки 4 для захвата изделий жестко закреплены на выходных звеньях 9 и 10, крепление губок выполнено разъемным. Форма губок соответствует форме передаваемых изделий. Звено 7 передаточного механизма 2 в поперечном сечении имеет прямоугольную форму, соответствующую форме сквозного отверстии 16 в теле ползуна 11.
Устройство типа «рука» для передачи изделий работает следующим образом.
При работе привода 5 вращение кривошипа 6 преобразуется посредством поворотной направляющей 8 в сложное движение выходного звена 7, совершающего поворотное и поступательное движения. При поступательном движении звена 7 ползун 11 периодически взаимодействует с поворотной направляющей 8. При взаимодействии ползуна с направляющей шатуны 12 и 13 генерируют поворотное движение выходных звеньев 9 и 10 относительно звена 7, при этом губки 4 занимают сжатое положение. Такое положение губки занимают в интервале всего рабочего хода. При отсутствии взаимодействия между ползуном 11 и направляющей 8 пружина 14 фиксирует ползун 11 в положении, при котором обеспечивается разжатое положение губок. Разжатое положение губки занимают при холостом ходе и на границах интервалов движения.
В интервале рабочего хода устройства губки 4, занимая сжатое положение, удерживают изделие, переносимое из позиции «схват изделия» в позицию «выдача изделия». По завершении рабочего хода губки разжимаются и перестают удерживать изделие, при этом последнее выводится из устройства. Холостой ход выполняется при разжатом положении губок.
При поворотном движении звена 7 в интервале рабочего хода его скорость достигает максимального значения в середине интервала и соответствует выражению
При холостом ходе максимум скорости звена 7 приходится на середину его интервала и соответствует выражению
где ωmax(p.х) - максимальная скорость выходного звена в интервале рабочего хода;
ωmax(х.х) - максимальная скорость выходного звена в интервале холостого хода;
ω - угловая скорость кривошипа;
λ - параметр передаточного механизма,  ;
;
r - длина кривошипа;
d - расстояние между центрами вращения кривошипа и качания поворотной направляющей.
Из формул (2) и (3) следует

Формулы (1)-(3) и неравенство (4) указывают соответственно на геометрическую проворачиваемость и силовую работоспособность механизмов предлагаемого устройства.
Предложенное устройство в сравнении с прототипом имеет более простую конструкцию, повышенную силовую работоспособность и производительность, обеспечивает большую точность работы.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2265510C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2266192C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2191108C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2265509C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2274544C1 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2006 |
|
RU2303520C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2224639C2 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2003 |
|
RU2245780C1 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2006 |
|
RU2331506C2 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2006 |
|
RU2331507C1 |
Изобретение относится к комбинированным механизмам со сложным движением выходных звеньев. Устройство содержит комбинированный механизм, выполненный в виде передаточного механизма с выходным звеном, исполнительного механизма с ведущим звеном и выходными звеньями, и привод. Выходное звено передаточного механизма является ведущим звеном исполнительного механизма. Выходные звенья исполнительного механизма кинематически связаны с выходным звеном передаточного механизма и снабжены губками для захвата изделий. Кинематическая связь содержит ползун, подвижно сопряженный с выходным звеном передаточного механизма, шатуны, каждый из которых шарнирно связан с ползуном и соответствующим выходным звеном, и силовой упругий элемент в виде пружины сжатия. Выходное звено передаточного механизма с выходными звеньями исполнительного механизма связаны также шарнирно. Изобретение позволит упростить конструкцию, повысить точность работы и производительность устройства. 7 з.п. ф-лы, 1 ил.
W=3·n-2р5-р4=3·3-2·4-0=1,
где W - степень подвижности механизма, W=1;
n - число подвижных звеньев: кривошип, кулиса, поворотная направляющая, n=3;
р5 - число низших кинематических пар, р5=4;
р4 - число высших кинематических пар, р4=0.
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2191107C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2191109C1 |
| US 5885052 A, 23.03.1999. | |||

