Предлагаемое изобретение относится к комбинированным механизмам со сложным движением выходных звеньев, которые применяются для выполнения вспомогательных операций при обслуживании машин, станков, прессов и устройств различного назначения. Такие манипуляционные механизмы, имитирующие определенные движения рук человека, обеспечивают захват изделия (объекта манипулирования), его перемещение из одной позиции в другую, освобождение и передачу изделия.
Известно, например, манипуляционное устройство, обеспечивающее захват изделия, его перемещение по дуге окружности и освобождение, содержащее исполнительный механизм с губками для захвата изделий, механизм поворота и гидропривод (Крайнев А.Ф. Словарь-справочник по механизмам. - М.: Машиностроение, 1987. - С.9 и 10, рис.а).
Основным недостатком данного устройства является усложненность привода и малая частота повторения рабочих циклов, т.е. невысокая производительность. Указанный недостаток является результатом использования отдельных двигателей для механизмов захвата и поворота, а также применения тихоходного гидравлического привода. Недостаток особенно ощутим при агрегатировании устройства с машинами-автоматами в линиях высокой производительности.
Известно также устройство типа “рука” для передачи изделий, содержащее комбинированный механизм, выполненный в виде передаточного механизма с выходным звеном, исполнительного механизма с выходными звеньями, последние из которых снабжены губками для захвата изделий, и привода (патент №2191109 (РФ), публ. в БИПМ, 2002. - №29) - прототип. Данное устройство является средством того же назначения, что и предлагаемое изобретение.
Основным недостатком прототипа является сравнительно большое число движущихся масс (конструктивных элементов) и пар трения, которые увеличивают энергозатраты на процесс передачи изделий, снижают точность работы и производительность устройства. Увеличение движущихся масс приводит к необходимости уменьшения скорости движения звеньев, а это удлиняет период рабочего цикла (снижает производительность). Зазоры в большом числе кинематических пар приводят к ошибкам положения и перемещения звеньев. Это снижает точность работы устройства.
Задачей настоящего изобретения является упрощение конструкции, повышение производительности и точности работы устройства.
Решение поставленной задачи достигается тем, что в устройстве типа “рука” для передачи изделий, содержащем комбинированный механизм, выполненный в виде передаточного механизма с выходным звеном, исполнительного механизма с выходными звеньями, последние из которых снабжены губками для захвата изделий и соединены с выходным звеном передаточного механизма, и привода, выходное звено передаточного механизма выполнено в виде ведущего звена исполнительного механизма, при этом в упомянутом соединении звеньев одно выходное звено исполнительного механизма жестко закреплено на выходном звене передаточного, а другое соединено с последним шарнирно.
Передаточный механизм выполнен в виде кулачкового механизма с центрально расположенным толкателем, совершающим возвратно-поступательные движения, при этом толкатель снабжен роликом для взаимодействия с профилем кулачка.
Исполнительный механизм выполнен в виде рычажно-зубчатого механизма, содержащего ведущее звено - толкатель, выходные звенья, выполненные в виде фигурных стержней, и промежуточные звенья в виде реечно-зубчатого зацепления, при этом он соответствует условию работоспособности при следующих значениях элементов его кинематической цепи
W=3·n-2p5-p4=3·2-2·2=1,
где W - степень подвижности при одном ведущем звене, W=1;
n - число подвижных звеньев: толкатель, выходное звено исполнительного механизма, n=2;
р5 - число низших кинематических пар: толкатель-направляющая, толкатель-выходное звено, р5=2;
р4 - число высших кинематических пар: зубчатое колесо-рейка, р4=1.
Губки для захвата изделий жестко закреплены на выходных звеньях исполнительного механизма, при этом упомянутое закрепление губок выполнено разъемным.
Шарнирное соединение выходных звеньев содержит палец, жестко закрепленный на свободном конце выходного звена передаточного механизма, при этом выходное звено исполнительного механизма выполнено с возможностью поворотного движения с углом размаха не более 90°.
В жестком закреплении выходного звена передаточного механизма с одним из выходных звеньев исполнительного последнее занимает положение, при котором вертикальная ось симметрии закрепленной на нем губки для захвата изделий расположена перпендикулярно линии хода выходного звена передаточного механизма.
Зубчатые рейки реечно-зубчатого зацепления в составе исполнительного механизма расположены на границах интервалов прямого и обратного ходов устройства, при этом рейки жестко закреплены на неподвижных стойках.
На пальце шарнирного соединения выходных звеньев смонтированы зубчатое колесо для взаимодействия с зубчатыми рейками и силовой упругий элемент, связывающий зубчатое колесо с выходным звеном передаточного механизма, при этом зубчатое колесо жестко связано с выходным звеном исполнительного механизма.
Силовой упругий элемент выполнен в виде пружины кручения, при этом один конец пружины закреплен на зубчатом колесе, другой - на выходном звене передаточного механизма.
Зубчатое колесо реечно-зубчатого зацепления снабжено упором для взаимодействия с выходным звеном передаточного механизма, при этом упор выполнен в виде пальца, жестко закрепленного на упомянутом зубчатом колесе.
Зубчатые рейки закреплены на стойках с противоположных сторон относительно линии хода толкателя передаточного механизма.
Зацеплению зубчатого колеса с любой из зубчатых реек соответствует разжатое положение губок для захвата изделий.
В интервалах прямого и обратного ходов устройства силовой упругий элемент обеспечивает сжатое положение губок, при этом упомянутый упор на зубчатом колесе находится во взаимодействии с выходным звеном передаточного механизма.
Заявляемое устройство отличается от прототипа сочетанием конструктивных элементов и характером связи между ними. Эти отличия обеспечивают упрощение конструкции, повышение производительности и точности работы.
Использование толкателя передаточного механизма в функции ведущего звена исполнительного механизма способствует упрощению конструкции устройства и обеспечивает возможность прямолинейного движения выходных звеньев с губками для захвата изделий. Это является предпочтительным при передаче изделий с увеличенной массой. Жесткое закрепление одного из выходных звеньев исполнительного механизма способствует упрощению конструкции: уменьшается число подвижных звеньев и кинематических пар.
Выполнение передаточного механизма в виде кулачкового механизма с центрально расположенным толкателем, совершающим возвратно-поступательные движения, позволяет реализовать любой предпочтительный закон движения толкателя при прямом и обратном ходах последнего. Эта возможность упрощает выбор благоприятного закона движения выходных звеньев исполнительного механизма.
Предложенный исполнительный механизм удовлетворяет условию работоспособности его кинематической цепи с заданными конструктивными элементами: необходимые движения его выходных звеньев с губками для захвата изделий обеспечиваются при возвратно-поступательном движении ведущего звена - толкателя. Механизм соответствует формуле Чебышева.
Жесткое закрепление губок на выходных звеньях исполнительного механизма определяется тем, что губки должны имитировать движение выходных звеньев. Выполнение закрепления губок разъемным вызвано тем, что такое закрепление обеспечивает возможность быстрой смены губок при переналадке устройства на передачу изделий другой формы.
Выполнение шарнирного соединения выходных звеньев передаточного и исполнительного механизмов посредством пальца является предпочтительным с точки зрения простоты сборки (разборки) и точности их поворотного движения. Возможность поворотного движения выходного звена исполнительного механизма с ограниченным углом размаха (не более 90°) определяется тем, что раскрытие губок для “схвата” или выдачи изделия обеспечивается при отстоянии губок одна от другой на угол меньше 90°.
Упомянутое жесткое закрепление одного из выходных звеньев исполнительного механизма с толкателем передаточного механизма выбрано с учетом удобства подачи изделия в губки и выдачи его из устройства. Непосредственно подача и выдача изделия выполняются без сопряжения последнего с губками.
Установка зубчатых реек на границах интервалов прямого и обратного ходов устройства связана с тем, что границы интервалов движения соответствуют позициям “схват изделия” и “выдача изделия”, в которых губки должны занимать разжатое положение. В интервалах же ходов, т.е. при отсутствии взаимодействия зубчатого колеса с рейкой, губки занимают сжатое положение, которое обеспечивается посредством силового упругого элемента - пружины кручения, смонтированной на пальце.
Жесткая связь выходного звена исполнительного механизма с зубчатым колесом при наличии общего центра их поворота определяется тем, что текущее положение зубчатого колеса однозначно определяет то или иное положение выходного звена. При взаимодействии зубчатого колеса с зубчатой рейкой оно определяет такое положение выходных звеньев исполнительного механизма, при котором губки для захвата изделий занимают разжатое положение. В интервалах же прямого и обратного ходов положение зубчатого колеса и соответственно выходных звеньев определяется его взаимодействием с силовым упругим элементом, при этом губки занимают сжатое положение.
Силовой упругий элемент, выполненный в виде пружины кручения, обеспечивает такое текущее положение одного из выходных звеньев исполнительного механизма при прямом и обратном ходах устройства, которому соответствует сжатое положение губок. Пружина обеспечивает сжатое положение губок при отсутствии взаимодействия между зубчатым колесом и зубчатой рейкой.
Упор, закрепленный на зубчатом колесе, фиксирует положение последнего относительно толкателя передаточного механизма. При этом губки занимают фиксирование сжатое положение, поскольку упор ограничивает поворот зубчатого колеса и связанного с ним выходного звена под действием пружины.
Упомянутое закрепление зубчатых реек с противоположных сторон относительно линии хода толкателя определяется необходимостью разжатия губок при различных направлениях движения толкателя.
Зацеплением зубчатого колеса с любой из зубчатых реек генерируется процесс разжатия губок в первой половине интервала зацепления и последующее их сжатие во второй половине интервала зацепления, т.е. при изменении направления движения толкателя.
В интервалах прямого и обратного ходов толкателя, т.е. при отсутствии взаимодействия зубчатого колеса с любой из реек, силовой упругий элемент воздействует на выходное звено исполнительного механизма, обеспечивая сжатое положение губок. При этом зубчатое колесо фиксируется на границе интервалов его поворотного движения. Такое положение обеспечивается посредством упора, закрепленного на зубчатом колесе, при его взаимодействии с толкателем. Упор, кроме того, определяет такое взаимодействие зубчатого колеса, которое соответствует его положению в момент начала зацепления с зубчатой рейкой.
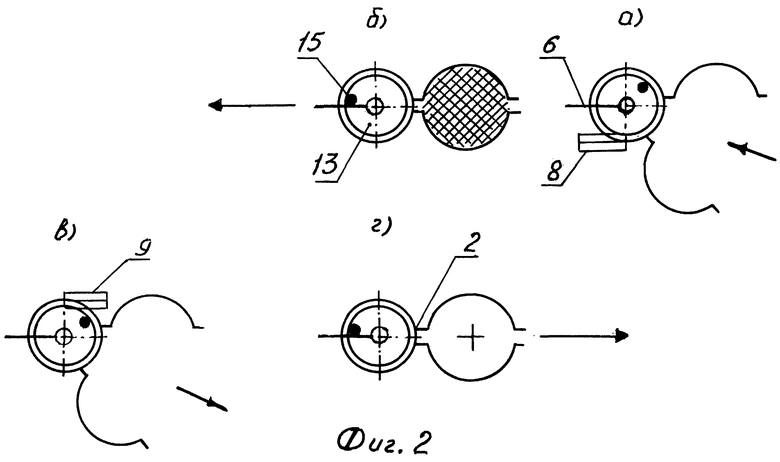
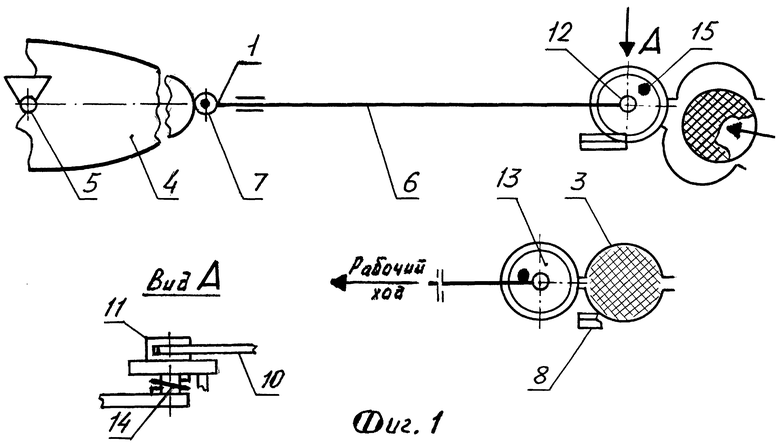
Предлагаемое устройство типа “рука” для передачи изделий поясняется чертежами. На фиг.1 изображена кинематическая схема устройства, на фиг.2 - схема взаимодействия зубчатого колеса с зубчатыми рейками (фиг. а, б, в, г).
Устройство содержит комбинированный механизм, выполненный в виде передаточного механизма 1, исполнительного механизма 2 с губками 3 для захвата изделий и привода, последний на чертежах не показан.
Механизм 1 включает ведущий кулачок 4, жестко закрепленный на валу 5 привода, и центрально расположенный толкатель 6 с роликом 7 для сопряжения с профилем кулачка. Толкатель 6 смонтирован в неподвижной направляющей.
Исполнительный механизм 2 содержит ведущее звено, функцию которого выполняет толкатель 6 передаточного механизма, две зубчатые рейки 8 и 9, жестко закрепленные на неподвижных стойках в позициях “схват изделия” и “выдача изделия”, и выходные звенья 10 и 11, при этом звено 10 жестко закреплено на толкателе 6, а звено 11 шарнирно связано с последним посредством пальца 12. На пальце 12 смонтировано зубчатое колесо 13 для взаимодействия с рейками 8 и 9 и силовой упругий элемент 14, выполненный в виде пружины кручения, при этом зубчатое колесо 13 жестко связано с выходным звеном 11, один конец упомянутой пружины 14 закреплен на зубчатом колесе 13, другой - на выходном звене передаточного механизма.
Зубчатое колесо 13 снабжено упором 15 для взаимодействия с выходным звеном передаточного механизма. Упор выполнен в виде пальца, жестко закрепленного на упомянутом зубчатом колесе.
Устройство типа “рука” для передачи изделий работает следующим образом.
При работе привода ведущий кулачок 4 совершает вращательное движение, которое преобразуется в возвратно-поступательное движение выходного звена - толкателя 6. Вместе с толкателем поступательное движение совершают выходные звенья 10 и 11 с губками 3 для захвата изделий. В интервале прямого и обратного ходов выходные звенья занимают относительно толкателя фиксированное положение, находясь от линии движения последнего на одинаковом удалении. Это обеспечивается посредством упругого элемента 14 и упора 15. Последний взаимодействует с толкателем передаточного механизма, при этом обеспечивается сжатое положение губок 3, фиг.2б) и г).
В позициях “схват изделия” и “выдача изделия”, соответствующих границам интервалов движения толкателя, зубчатое колесо 13 взаимодействует соответственно с зубчатой рейкой 8 и 9, выходное звено 11 и закрепленная на нем губка 3 совершают поворотное движение на пальце 12. При этом губки занимают разжатое положение, необходимое для приема и выдачи изделия, фиг.2а) и в).
После выхода зубчатого колеса 13 из зацепления с зубчатой рейкой 8 или 9 (движение толкателя 6 от границы интервалов) выходное звено 11 под действием силового упругого элемента 14 возвращается в начальное положение, при этом губка, закрепленная на звене 11, посредством упора 15 фиксируется в рабочем положении. В результате обеспечивается сжатое положение губок.
В интервале рабочего хода устройства губки 3 удерживают изделие, переносимое по прямой траектории из одной позиции в другую. По завершении рабочего хода губки разжимаются и перестают удерживать изделие, при этом последнее выводится из устройства. Холостой ход выполняется аналогично рассмотренному, но при отсутствии изделия.
Предложенное устройство позволяет в сравнении с прототипом упростить конструкцию, повысить производительность и точность работы.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2217297C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2232672C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2224638C2 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2006 |
|
RU2303520C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2265509C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2010 |
|
RU2438856C2 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2333829C1 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2006 |
|
RU2312008C1 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2012 |
|
RU2521934C1 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2006 |
|
RU2312763C1 |
Изобретение относится к комбинированным механизмам со сложным движением выходных звеньев. Устройство содержит комбинированный механизм, выполненный в виде передаточного механизма с выходным звеном, исполнительного механизма с выходными звеньями, последние из которых снабжены губками для захвата изделий и соединены с выходным звеном передаточного механизма, и привода. Выходное звено передаточного механизма выполнено в виде ведущего звена исполнительного механизма. При этом в упомянутом соединении звеньев одно выходное звено исполнительного механизма жестко закреплено на выходном звене передаточного, а другое соединено с последним шарнирно. Передаточный механизм выполнен в виде кулачкового механизма с центрально расположенным толкателем, совершающим возвратно-поступательные движения, при этом толкатель снабжен роликом для взаимодействия с профилем кулачка. Шарнирное соединение выходных звеньев содержит палец, жестко закрепленный на свободном конце выходного звена передаточного механизма, при этом выходное звено исполнительного механизма выполнено с возможностью поворотного движения с углом размаха не более 90°. В жестком закреплении выходного звена передаточного механизма с одним из выходных звеньев исполнительного последнее занимает положение, при котором вертикальная ось симметрии закрепленной на нем губки для захвата изделий расположена перпендикулярно линии хода выходного звена передаточного механизма. Изобретение позволит упростить конструкцию, повысить точность работы и производительность устройства. 12 з.п. ф-лы, 2 ил.
W=3·n-2р5-р4=3·2-2·2-1=1,
где W - степень подвижности при одном ведущем звене, W=1;
n - число подвижных звеньев: толкатель, выходное звено исполнительного механизма, n=2;
р5 - число низших кинематических пар: толкатель - направляющая, толкатель - выходное звено, p5=2;
р4 - число высших кинематических пар: зубчатое колесо - рейка, р4=1.
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2191107C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2191109C1 |
| ШЛИФОВАЛЬНЫЙ ИНСТРУМЕНТ | 1991 |
|
RU2037391C1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Экономайзер | 0 |
|
SU94A1 |

