Изобретение относится к транспортному оборудованию для горной промышленности и может быть использовано в приводах забойных конвейеров при подземной разработке полезных ископаемых.
Известен способ управления приводом конвейера с помощью автоматической системы, содержащей гидравлическую муфту изменяемого объема. Вход муфты соединен с первичным двигателем, а выход - с тормозом и грузом. Муфта содержит приспособление, регулирующее объем ее наполнения и реагирующее на внешние управляющие сигналы для пуска и остановки груза. Регулирующее приспособление реагирует на датчик реакции тормоза и скорость груза так, что при поступлении пускового сигнала тормоз освобождается для поддержания требуемой величины ускорения (см. заявку ЕР №0166511, Мкл. В65G 23/26, опублик. 01.02.86).
К недостаткам такого способа управления конвейером следует отнести высокую стоимость системы автоматического регулирования, а также то, что при использовании способа отсутствует принудительное торможение приводного вала конвейера, что приводит к значительному холостому выбегу цепи конвейера во время его остановки. Это может привести к нежелательным последствиям, особенно при работе конвейера на наклонных пластах.
Для предварительного натяжения цепи конвейера, что необходимо для устойчивой его работы, в таких приводах применяют специальные механические и гидромеханические устройства, например, гидродвигатели с механической передачей на редуктор привода конвейера. Используются храповые устройства или диск, установленный на первичном валу редуктора с фрикционными колодками, которые стопорят первичный вал редуктора.
Такие устройства значительно усложняют конструкцию приводов конвейера и главное не обеспечивают определенную величину предварительного натяжения цепи конвейера.
Наиболее близким к настоящему изобретению по технической сущности и достигаемому техническому результату является способ управления приводом скребкового конвейера с эпициклическим редуктором, содержащим ступень с дифференциальным механизмом. Как известно, простые эпициклические механизмы могут быть образованы сочетанием цилиндрических зубчатых колес с внутренним и внешним зацеплением (С.Н.Кожевников и др. "Механизмы". Справочное пособие. М.: Машиностроение, 1976, с.188, 189). Способ заключается в разгоне электрического двигателя привода скребкового конвейера до номинального значения рабочей характеристики при отсутствии тормозного момента на внешнем центральном колесе дифференциального механизма с последующим подключением кинематической цепи привода конвейера к выходному валу двигателя путем создания тормозного момента на внешнем центральном колесе дифференциального механизма и снятии упомянутого тормозного момента при выключении конвейера (см. описание к авторскому свидетельству СССР №572022, Мкл. B65G 23/26, опублик. 25.05.78).
Известный способ позволяет осуществлять запуск электродвигателя конвейера в холостую, но не обеспечивает уменьшение холостого выбега цепи конвейера и требует специального тормозного устройства для проведения предварительного натяжения цепи конвейера.
Техническая задача, решаемая изобретением, заключается в повышении пусковых характеристик привода и ликвидации холостого выбега скребковой цепи, а также осуществления ее необходимой расчетной предварительной натяжки.
Поставленная задача решается за счет того, что в способе управления приводом скребкового конвейера с эпициклическим редуктором, содержащим ступень с дифференциальным механизмом, заключающемся в разгоне электрического двигателя привода скребкового конвейера до номинального значения рабочей характеристики при отсутствии тормозного момента на внешнем центральном колесе дифференциального механизма с последующим подключением кинематической цепи привода конвейера к выходному валу двигателя путем создания тормозного момента на внешнем центральном колесе дифференциального механизма и снятии упомянутого тормозного момента при выключении конвейера, на выходном валу дифференциального механизма дополнительно создают тормозной момент при разгоне электрического двигателя привода скребкового конвейера до номинального значения рабочей характеристики, а также при выключении конвейера, и снимают этот тормозной момент при подключении кинематической цепи привода конвейера.
А также за счет того, что создание тормозного момента на внешнем центральном колесе дифференциального механизма и снятие тормозного момента на выходном валу дифференциального механизма при подключении кинематической цепи привода конвейера к выходному валу двигателя, а также снятие тормозного момента на внешнем центральном колесе дифференциального механизма и создание тормозного момента на выходном валу дифференциального механизма при отключении кинематической цепи привода конвейера от выходного вала двигателя при выключении конвейера производят одновременно.
Также за счет того, что предварительное натяжение скребковой цепи конвейера производят путем подключения кинематической цепи привода конвейера при создании ограниченного тормозного момента на внешнем центральном колесе дифференциального механизма с последующим созданием тормозного момента на выходном валу дифференциального механизма при выключении двигателя.
Способ управления приводом скребкового конвейера с эпициклическим редуктором осуществляется следующим образом. При пуске двигателя привода первоначально происходит его разгон до достижения номинального значения рабочей характеристики. В это время к выходному валу дифференциального механизма, являющегося первой ступенью эпициклического редуктора, прикладывается тормозной момент, а на внешнем центральном колесе дифференциального механизма тормозной момент отсутствует. В результате разгон двигателя и его выход на рабочую характеристику происходит при вращении только центрального колеса дифференциального механизма. При этом водило дифференциального механизма и соответственно конвейер неподвижны. Когда пуск (разгон) двигателя заканчивается, потребляемый им ток снижается до минимума, что служит сигналом на снятие тормозного момента на выходном валу дифференциального механизма и создание тормозного момента на внешнем центральном колесе дифференциального механизма. Для исключения динамических нагрузок в кинематической цепи привода необходимо соблюдать одновременность создания и снятия обоих вышеуказанных тормозных моментов.
Если развиваемое приводом усилие достаточно, чтобы преодолеть момент сопротивления движению, то конвейер приходит в движение в рабочем направлении. Если цепь конвейера заштыбуется или заклинится и усилие на ней превысит допустимое, произойдет увеличение тока в цепи двигателя, что служит сигналом для создания тормозного момента на выходном валу дифференциального механизма и снятия тормозного момента на внешнем центральном колесе дифференциального механизма.
При этом вращение от электродвигателя перестанет передаваться на выходной вал редуктора и он затормозится усилием, возникшим в цепи конвейера, и дополнительно тормозным моментом на водиле дифференциального механизма.
При выключении конвейера будет также снят тормозной момент на внешнем центральном колесе дифференциального механизма и выходной вал привода конвейера и цепь конвейера остановятся без холостого (инерционного) выбега.
Предварительное (монтажное) натяжение цепи конвейера производится следующим образом. Для регулирования усилия предварительного натяжения цепи устанавливается необходимый уменьшенный тормозной момент, который следует приложить к внешнему центральному колесу дифференциального механизма. После включения и разгона электродвигателя создают уменьшенный тормозной момент на внешнем центральном колесе дифференциального механизма. Одновременно производят снятие тормозного момента на выходном валу дифференциального механизма. Выходной вал дифференциального механизма начинает вращаться и, соответственно, начинает вращаться выходной вал привода конвейера. Цепь конвейера натягивается с усилием, соответствующим заданному усилию предварительного натяжения. Когда приводной вал остановится за счет уменьшенного тормозного момента приложенного к внешнему центральному колесу дифференциального механизма, производят снятие этого тормозного момента. Одновременно прикладывают тормозной момент на выходной вал дифференциального механизма. Выходной вал привода затормаживается для проведения перемонтажа цепи конвейера.
Способ реализуется при выполнении привода скребкового конвейера с эпициклическим редуктором, включающим электродвигатель, эпициклический редуктор с дифференциальным и планетарным механизмами, выходной вал которого связан с приводной звездочкой конвейера. Дифференциальный механизм редуктора выполнен в виде центрального колеса с внутренним зацеплением, связанного через первую управляемую муфту с корпусом редуктора, и сателлитов, установленных на водило. Вал водила дифференциального механизма связан с входным валом планетарного механизма, а через вторую управляемую муфту связан с корпусом редуктора. Для включения и выключения первой и второй управляемых муфт привод снабжен приспособлением для синхронизации.
Предпочтительно выполнение первой и второй управляемых муфт в виде дисковых фрикционных муфт, при этом первая управляемая муфта выполнена нормально разомкнутой, а вторая управляемая муфта - нормально замкнутой.
Целесообразно выполнить приспособление для синхронизации включения и выключения первой и второй управляемых муфт в виде двух оппозитно расположенных одноплунжерных гидравлических цилиндров. Рабочие камеры этих гидравлических цилиндров гидравлически связаны между собой, а их плунжеры кинематически связаны соответственно с полумуфтами первой и второй управляемых муфт.
Конструкция привода скребкового конвейера с эпициклическим редуктором поясняется кинематической схемой, представленной на чертеже.
Привод включает электродвигатель 1 и эпициклический редуктор с дифференциальным 2 и планетарным 3 механизмами. Выходной вал 4 редуктора связан с приводной звездочкой 5 конвейера. Дифференциальный механизм редуктора выполнен в виде центрального колеса 6 с внутренним зацеплением, которое связано через первую управляемую муфту 7 с корпусом 8 редуктора, и сателлитов 9, установленных на водило 10. Вал водила 10 связан с входным валом планетарного механизма 3 и через вторую управляемую муфту 11 связан с корпусом 8 редуктора. Привод снабжен приспособлением для синхронизации включения и выключения первой 7 и второй 11 управляемых муфт.
Как первая 7, так и вторая 11 управляемые муфты могут быть выполнены в виде дисковых фрикционных муфт, что является наиболее предпочтительным вариантом выполнения. Но при этом может быть применена и другая конструкция управляемых муфт, например, гидравлическая, кулачковая или зубчатая муфта.
Первая управляемая муфта 7, установленная между центральным колесом 6 с внутренним зацеплением дифференциального механизма и корпусом 8 редуктора, выполнена нормально разомкнутой. При ее включении центральное колесо 6 дифференциального механизма жестко соединяется с корпусом 8 редуктора и дифференциальный 2 механизм превращается в планетарный. При включении электродвигателя 1 привода происходит разгон двигателя до выхода его на номинальный режим работы. При этом первая управляемая муфта 7 разомкнута, центральное колесо 6 дифференциального механизма, связанное с валом двигателя, вращается вместе с сателлитами 9 дифференциального механизма, но поскольку водило 10, на котором расположены сателлиты 9, заторможено посредством второй управляемой муфты 11, крутящий момент передается на центральное колесо 6 с внутренним зацеплением дифференциального механизма, которое свободно вращается.
После разгона двигателя 1, т.е. до достижения номинального значения рабочей характеристики, подается сигнал на включение первой управляемой муфты 7. При этом происходит торможение центрального колеса 6 дифференциального механизма, поскольку полумуфта, закрепленная на центральном колесе 6, замыкается с полумуфтой, закрепленной на корпусе 8 редуктора. Одновременно происходит расцепление полумуфт второй управляемой муфты 11, в результате чего происходит растормаживание водила редуктора. При этом вращение от электродвигателя 3 передается на водило 10 дифференциального механизма и, соответственно, на выходной вал 4 редуктора привода конвейера.
Для одновременного срабатывания первой 7 и второй 11 управляемых муфт необходимо применение приспособления синхронизации. В зависимости от конструкции управляемых муфт могут быть применены и различные приспособления синхронизации. В описываемой конструкции привода скребкового конвейера применено приспособление, выполненное в виде двух оппозитно расположенных одноплунжерных гидравлических цилиндров 12, 13 с общей рабочей камерой 14. При подаче рабочей жидкости под давлением Р в рабочую камеру 14 плунжер гидравлического цилиндра 12, кинематически связанный с приводом включения первой управляемой муфты 7, прижимает фрикционные диски друг к другу и при этом происходит торможение центрального колеса 6 дифференциального механизма. В это же время плунжер гидравлического цилиндра 13, кинематически связанный с приводом включения второй управляемой муфты 11, отжимает фрикционные диски полумуфт друг от друга. При этом происходит снятие тормозного момента с вала водила дифференциального механизма. После этого крутящий момент передается через планетарный механизм 3 на приводную звездочку 5 конвейера. Без воздействия плунжера гидравлического цилиндра 13 полумуфты второй управляемой муфты 11 прижаты друг к другу под действием пружины 15. Регулировка натяжения цепи конвейера производится путем изменения давления рабочей жидкости, подаваемой в рабочую камеру гидравлических цилиндров. При этом изменяется тормозной момент на центральном колесе 6 дифференциального механизма и его торможение происходит с ограниченным моментом, создавая на выходном валу редуктора заданный крутящий момент и соответственно заданную величину натяжения скребковой цепи. В этом режиме происходит проскальзывание дисков обеих полумуфт друг относительно друга.
В целом предложенные способ управления приводом скребкового конвейера с эпициклическим редуктором и привод скребкового конвейера с эпициклическим редуктором позволяют за счет простых конструктивных средств обеспечить повышение пусковых характеристик привода, ликвидировать холостой выбег скребковой цепи, а также осуществить ее необходимое расчетное предварительное натяжение.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПУСКА ЦЕПНОГО ТЯГОВОГО ОРГАНА ГОРНЫХ МАШИН И ПРИВОД ЦЕПНОГО ТЯГОВОГО ОРГАНА ГОРНОЙ МАШИНЫ | 2007 |
|
RU2379507C2 |
| ПРИВОД СКРЕБКОВОГО КОНВЕЙЕРА | 1999 |
|
RU2149813C1 |
| ПРИВОД СКРЕБКОВОГО КОНВЕЙЕРА И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КРУТЯЩЕГО МОМЕНТА | 1995 |
|
RU2087396C1 |
| ПРИВОД ПОВОРОТА | 2007 |
|
RU2328442C1 |
| ДВУХПОТОЧНЫЙ ПРИВОД ВАЛА ОТБОРА МОЩНОСТИ ТРАКТОРА | 2012 |
|
RU2506175C1 |
| ТРАНСМИССИЯ БЫСТРОХОДНОЙ ГУСЕНИЧНОЙ МАШИНЫ | 2006 |
|
RU2307758C1 |
| ПРИВОД СКРЕБКОВОГО КОНВЕЙЕРА | 2000 |
|
RU2170204C1 |
| ТРАНСМИССИЯ ГУСЕНИЧНОЙ МАШИНЫ С БОРТОВЫМИ КОРОБКАМИ ПЕРЕДАЧ | 2009 |
|
RU2412847C1 |
| Привод скребкового конвейера | 1987 |
|
SU1459980A1 |
| Привод скребкового конвейера | 1982 |
|
SU1102733A1 |
Изобретение относится к транспортному оборудованию, а именно к способу управления приводом скребкового конвейера, а также к конструкции такого привода. Способ заключается в разгоне электрического двигателя привода скребкового конвейера до номинального значения рабочей характеристики при отсутствии тормозного момента на внешнем центральном колесе дифференциального механизма с последующим подключением кинематической цепи привода конвейера к выходному валу двигателя путем создания тормозного момента на внешнем центральном колесе дифференциального механизма и снятия упомянутого тормозного момента при выключении конвейера. На выходном валу дифференциального механизма дополнительно создают тормозной момент при разгоне электрического двигателя привода скребкового конвейера до номинального значения рабочей характеристики, а также при выключении конвейерами снимают этот тормозной момент при подключении кинематической цепи привода конвейера. Для осуществления способа применяют привод с эпициклическим редуктором. Привод включает электродвигатель, редуктор с дифференциальным механизмом, выполненным в виде центрального колеса с внутренним зацеплением. Это колесо связано через первую управляемую муфту с корпусом редуктора. Привод содержит дополнительную управляемую муфту, одна полумуфта которой связана с корпусом редуктора, а вторая установлена на выходном валу дифференциального механизма редуктора. Технический результат - повышение пусковых характеристик привода и ликвидация холостого выбега скребковой цепи и осуществление ее необходимой расчетной предварительной натяжки. 2 н. и 4 з.п. ф-лы, 1 ил.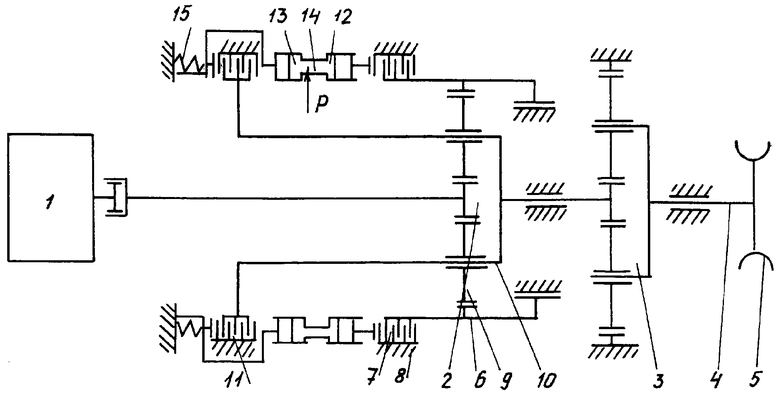
| Привод скребкового конвейера | 1975 |
|
SU572022A1 |
| Электропривод конвейерных систем | 1974 |
|
SU591364A1 |
| Выпрямитель момента | 1980 |
|
SU937855A1 |
| WO 9927278 A1, 03.06.1999. | |||

