Предлагаемое устройство относится к устройствам железнодорожной автоматики, телемеханики и связи.
Известны устройство для управления движением поездов (авт. свид. СССР №1267257; патенты РФ №№2049693, 2092355, 2108252; Чуров Е.П. Спутниковые системы радионавигации. М.: Сов. радио, 1997 и другие).
Из известных устройств наиболее близким к предлагаемому является "Устройство для управления движением поездов с помощью искусственных спутников Земли" (патент РФ №2092355, В61L 25/02, 1997), которое и выбрано в качестве прототипа.
Указанное устройство обеспечивает упрощение и существенное удешевление аппаратуры железнодорожной космической системы управления движением поездов при повышении пропускной способности железнодорожных перегонов, повышение уровня безопасности движения и разгрузки каналов спутниковой связи. Локомотивы снабжены рельсовыми локаторами, что позволяет значительно повысить точность определения координат поездов и снизить требования по точности к системе космической навигации путем двуканального построения устройства управления движением поездов, где функцию "грубой" шкалы для диспетчерского контроля выполняет система космической навигации, а функцию "точной" шкалы для безопасного движения - рельсовый локатор.
Технической задачей изобретения является повышение надежности дуплексной связи между диспетчерским пунктом и локомотивами путем использования сложных сигналов с фазовой манипуляцией и двух частот ω1 и ω2.
Поставленная задача решается тем, что устройство для управления движением поездов с помощью искусственных спутников Земли, содержащие установленные на каждом локомотиве приемники передаваемых с искусственных спутников Земли сигналов, выход каждого из которых связан с входом соответствующего из дальномеров, выходами подключенных к входам блока формирователя сигналов местоположения поезда путем решения навигационных уравнений, подключенным к выходам рельсового локатора и связанного выходами с входом блока контроля и регулирования скорости движения поезда, входом блока памяти, входом локомотивного дисплея и через цифроаналоговый преобразователь с входом радиостанции, выполненной с возможностью передачи сигналов через спутник связи на диспетчерский пункт, на котором установлен блок обработки информации, связанный с радиостанцией и дисплеем, каждая радиостанция выполнена в виде последовательно включенных генератора высокочастотных колебаний, фазового манипулятора, второй вход которого соединен с выходом формирователя дискретных сообщений, первого смесителя, второй вход которого соединен с выходом первого гетеродина, усилителя первой промежуточной частоты, первого усилителя мощности, дуплексера, вход-выход которого связан с приемопередающей антенной, второго усилителя мощности, второго смесителя, второй вход которого соединен с выходом второго гетеродина, усилителя второй промежуточной частоты, перемножителя, второй вход которого соединен с выходом первого гетеродина, полосового фильтра и фазового детектора, второй вход которого соединен с выходом второго гетеродина, а выход является выходом радиостанции, причем радиостанция, установленная на локомотиве излучает сложный сигнал с фазовой манипуляцией на несущей частоте ω1, а принимает - на несущей частоте ω2, а радиостанция, установленная на диспетчерском пункте, излучает сложный сигнал с фазовой манипуляцией на несущей частоте ω2, а принимает - на несущей частоте ω1.
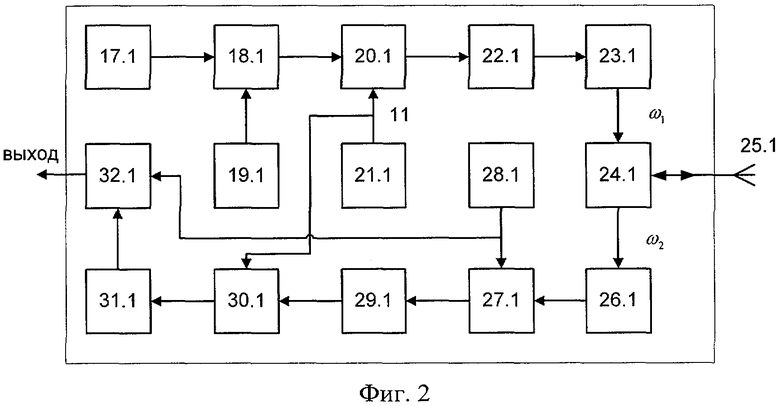
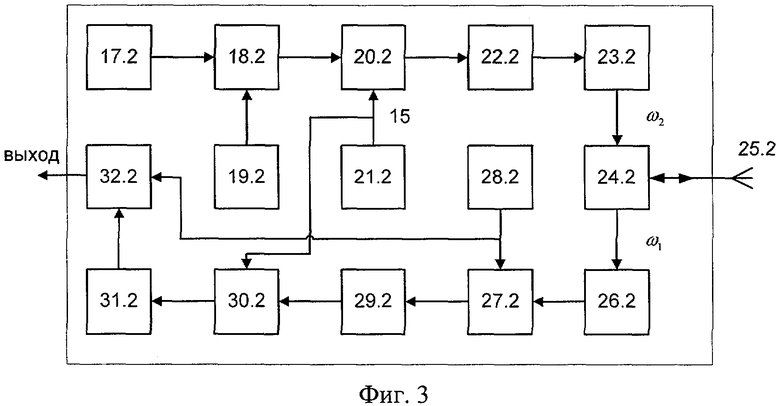
Структурная схема предлагаемого устройства представлена на фиг.1. Структурные схемы радиостанций 11 и 15, установленных на локомотиве 2 и диспетчерском пункте 13, представлены на фиг.2 и фиг.3 соответственно. Частотная диаграмма, иллюстрирующая процесс преобразования сигналов по частоте, изображена на фиг.4. Временные диаграммы, поясняющие работу радиостанций 11 и 15, представлены на фиг.5.
Устройство содержит навигационные искусственные спутниковые Земли (ИСЗ) 1.1-1.3, локомотив 2, приемники 3.1-3.3, дальномеры 4.1-4.3, блок 5 формирования сигналов местоположения поезда, блок 6 памяти, рельсовый локатор 7, блок 8 контроля и регулирования скорости поезда, локомотивный дисплей 9, цифроаналоговый преобразователь 10, локомотивную радиостанцию 11, спутник связи 12, диспетчерский пункт 13, блок 14 обработки информации, радиостанцию 15 диспетчерского пункта и дисплей 16 диспетчерского пункта.
Радиостанция 11 (15) локомотива 2 (диспетчерского пункта 13) содержит последовательно включенные генератор 17.1 (17.2) высокочастотных колебаний, фазовый манипулятор 18.1 (18.2), второй вход которого соединен с выходом формирователя 19.1 (19.2) дискретных сообщений, первый смеситель 20.1 (20.2), второй вход которого соединен с выходом первого гетеродина 21.1 (21.2), усилитель 22.1 (22.2) первой промежуточной частоты, первый усилитель 23.1 (23.2) мощности, дуплексер 24.1 (24.2), вход-выход которого связан с приемопередающей антенной 25.1 (25.2), второй усилитель 26.1 (26.2) мощности, второй смеситель 27.1 (27.2), второй вход которого соединен с выходом второго гетеродина 28.1 (28.2), усилитель 29.1 (29.2) второй промежуточной частоты, перемножитель 30.1 (30.2), второй вход которого соединен с выходом гетеродина 21.1 (21.2), полосовой фильтр 31.1 (31.2) и фазовый детектор 32.1 (32.2), второй вход которого соединен с выходом гетеродина 28.1 (28.2), а выход является выходом радиостанции 11 (15).
Устройство работает следующим образом.
Спутники 1.1-1.3 передают опорные сигналы и сигналы о своих эфемеридах, которые принимаются локомотивными приемниками 3.1-3.3, последние выдают опорные сигналы на дальномеры 4.1-4.3 для измерения расстояний от локомотива до навигационных спутников. Эта информация, а также данные об эфемеридах вводятся в блок 5 формирования сигналов местоположения поезда и блок 6 памяти, где предварительно записывается программа решения навигационных уравнений.
Эта задача решается в блоке 5 формирования сигналов местоположения поезда. Рассчитанные таким образом координаты и составляющие вектора скорости поезда подаются на цифроаналоговый преобразователь 10 для передачи на диспетчерский пункт 13. Эта информация поступает на формирователь 19.1 дискретных сообщений, где формируется модулирующий код М1 (t) (фиг.5, б).
Генератор 17.1 высокочастотных колебаний формирует гармоническое колебание (фиг.5, а)
Uc1(t)=Vc1cos(ωct+ϕc1), 0≤t≤Tc1,
где
Vc1, ωc,ϕc1, Tc1 - амплитуда, несущая частота, начальная фаза и длительность колебания;
которое поступает на первый вход фазового манипулятора 18.1, на второй вход которого подается модулирующий код М1(t) (фиг.5, б) с выхода формирователя 19.1 дискретных сообщений. На выходе фазового манипулятора 18.1 образуется сложный сигнал с фазовой манипуляцией (ФМн) (фиг.5, в)
U1(t)=Vc1cos(ωct+ϕk1(t)+ϕc1), 0≤t≤Tc1,
где
ϕk1(t)={0, π} - манипулируемая составляющая фазы, отображающая закон фазовый манипуляции в соответствии с модулирующим кодом M1(t) (фиг.5, б), причем ϕk1(t)=const при kτэ<t<(k+1)τэ и может изменяться скачком при t=kτэ, т.е. на границах между элементарными посылками (k=1, 2,...,N1);
τэ, N1 - длительность и количество элементарных посылок, из которых составлен сигнал длительностью Tc1 (Tc1=N1τэ),
который поступает на первый вход первого смесителя 20.1, на второй вход которого подается напряжение первого гетеродина 21.1
UГ1(t)=VГ1cos(ωГ1t+ϕГ1).
На выходе смесителя 20.1 образуются напряжения комбинационных частот.
Усилителем 22.1 выделяется напряжение первой (суммарной) частоты
Unp1(t)=Vnp1cos(ωnp1t+ϕk1(t)+ϕnp1),
где
Vnp1= K1Vc1VГ1, 0≤t≤Tc1;
K1Vc1VГ1, 0≤t≤Tc1;
K1 - коэффициент передачи смесителя;
ωnp1=ωc+ωГ1 - первая промежуточная частота;
ϕnp1=ϕc1+ϕГ1.
Это напряжение после усиления в усилителе 23.1 мощности через дуплексер 24.1 излучается приемопередающей антенной 25.1 в эфир на частоте, ω1=ωnp1 улавливается приемопередающей антенной 25.2 диспетчерского пункта 13 и через усилитель 26.2 мощности поступает на первый вход смесителя 27.2. На второй вход смесителя 27.2 подается напряжение UГ1 (t) гетеродина 28.2. На выходе смесителя 27.2 образуются напряжения комбинационных частот. Усилителем 29.2 выделяется напряжение второй промежуточной (разностной) частоты
Unp2(t)=Vnp2cos(ωnp2t+ϕk1(t)+ϕnp2), 0≤t≤Tc1,
где
ωnp2=ωпр1-ωГ1 - вторая промежуточная (разностная) частота;
ϕnp2=ϕпр1-ϕГ1,
которое поступает на первый вход перемножителя 30.2. На второй вход перемножителя 31.2 подается напряжение гетеродина 21.2
UГ2(t)=VГ2cos(ωГ2t+ϕГ2).
На выходе перемножителя 30.2 образуется напряжение (фиг.5, г)
U2(t)=V2cos(ωг1t-ϕk1(t)+ϕГ1), 0≤t≤Tc1,
где
V2=K2Vnp2VГ2;
K2 - коэффициент передачи множителя;
которое выделяется полосовым фильтром 31.2 и поступает на информационный вход фазового детектора 32.2, на опорный вход которого подается напряжение UГ1(t) гетеродина 28.2. В результате синхронного детектирования на выходе фазового детектора 32.2 образуется низкочастотное напряжение (фиг.5, д)
UH1(t)=VH1cosϕk1(t), 0≤t≤Tc1,
где
VH1=K3V2VГ1;
К3 - коэффициент передачи фазового детектора,
пропорциональное модулирующему коду M1{t) (фиг.5, б).
Это напряжение подается на блок 14 обработки информации, куда таким же образом передается информация со всех локомотивов. В результате ее обработки вырабатываются команды управления движением, которые по обратным каналам спутниковой связи передаются на локомотивы.
С этой целью на диспетчерском пункте 13 генератором 17 высокочастотных колебаний формируется гармоническое колебание (фиг.5, е)
Uc2(t)=Vc2cos(ωct+ϕc2), 0≤t≤Tc2,
которое поступает на первый вход фазового манипулятора 18.2, на второй вход которого подается модулирующий код M2(t) (фиг.5, ж) с выхода формирователя 19.2 дискретных сообщений. В качестве модулирующего кода М2(t) используются команды управления движением локомотива. На выходе фазового манипулятора 18.2 образуется сложный сигнал с фазовой манипуляцией (ФМн) (фиг.5, з)
U3(t)=Vc2cos(ωct+ϕk2(t)+ϕc2), 0≤t≤Tc2,
который поступает на первый вход смесителя 20.2, на второй вход которого подается напряжение UГ2(t) гетеродина 21.2. На выходе смесителя 20.2 образуется напряжение комбинационных частот. Усилителем 22.2 выделяется напряжение промежуточной частоты
Unp(t)=Vnpcos(ωnpt+ϕk2(t)+ϕnp2), 0≤t≤Tc2
где
Vnp=K1Vc1VГ2;
ωnp=ωГ2-ωc=ω2=ωГ1 - промежуточная частота;
ϕnp=ϕГ2-ϕc2.
Это напряжение после усиления в усилителе 23.2 мощности через дуплексер 24.2 излучается приемопередающей антенной 25.2 на частоте ω2 в эфир, улавливается приемопередающей антенной 25.1 и через усилитель 26.1 мощности поступает на первый вход смесителя 27.1. На второй вход смесителя 27.1 подается напряжение UГ2(t) гетеродина 28.1. На выходе смесителя 27.1 образуются напряжения комбинационных частот, усилителем 29.1 выделяется напряжение второй промежуточной (разностной) частоты
Unp3(t)=Vnp3cos[ωnp2t+ϕk2(t)+ϕnp3], 0≤t≤Tc2,
где
Vnp3=K1VnpVГ2;
ωnp2=ωГ2-ω2 - вторая промежуточная (разностная) частота;
ωnp3=ωnp-ωГ2,
которое поступает на первый вход перемножителя 30.1, на второй вход которого подается напряжение UГ1 (t) гетеродина 21.1. На выходе перемножителя 30.1 образуется напряжение (фиг.5, и)
U4(t)=V4cos(ωГ2t+ϕk2(t)+ϕГ2), 0≤t≤Tc2,
где
V4=K2Vnp3VГ1;
которое выделяется полосовым фильтром 31.1 и поступает на информационный вход фазового детектора 32.1, на опорный вход которого подается напряжение Uг2(t) гетеродина 27.1. На выходе фазового детектора 32.1 образуется низкочастотное напряжение (фиг.5, к)
UH2(t)=VH2cosϕk2(t), 0≤t≤Tc2,
где
VH2=K3V4VГ2;
пропорциональное модулирующему коду M2(t) (фиг.5, ж).
Это напряжение поступает на исполнительные органы локомотива.
Таким образом, реализуется грубая шкала для диспетчерского контроля.
Точное измерение относительного расстояния и относительной скорости поездов производится рельсовым локатором 7 также с помощью блока 5 формирования сигналов местоположения поезда, где осуществляется операция дифференцирования относительного расстояния. Результаты относительных измерений по точной шкале поступают в блок 8 для контроля и регулирования скорости транспортного средства.
На дисплее 9 локомотива отображаются команды управления и точная шкала данного локомотива, а на дисплее 16 диспетчерского пункта - навигационная информация по грубым шкалам, поступающая от всех локомотивов.
Спутниковые навигационные системы предназначены для определения координат и скоростей любых транспортных средств и строятся таким образом, чтобы в каждой точке Земного шара наблюдалось минимум 3-4 ИСЗ. Эти навигационные спутники излучают опорные сигналы, принимаемые приемниками, расположенными на транспортных средствах. На каждом транспортном средстве размещают также дальномеры, измеряющие расстояния до спутников di, где i=1, 2, 3 номер ИСЗ, а также блок 5 формирования сигналов местоположения поезда и блок 6 памяти, с помощью которых решается навигационная задача вычисления координат и скоростей пользователя в геодезической системе координат  и
и  путем определения корней системы управлений
путем определения корней системы управлений
где
хi, yi, zi,  - координаты и скорости (составляющие ее вектора) навигационных спутников (эфемериды). Они передаются пользователю вместе с опорным сигналом.
- координаты и скорости (составляющие ее вектора) навигационных спутников (эфемериды). Они передаются пользователю вместе с опорным сигналом.
Для реализации навигационных измерений с точностью 45 м и 1.6 км/ч в полученные данные нужно вводить поправки на нестабильность частоты опорных сигналов, которые также передаются пользователю и выделяются с помощью специальных дешифраторов на его борту.
Спутниковая система связи состоит из нескольких ИСЗ с бортовыми ретрансляторами и предназначена для обеспечения дуплексной связи блока 5 формирования сигналов местоположения поезда.
Структура, в которой производится решение системы, содержит алгебраические сумматоры, квадратор, дифференциаторы, умножители, компараторы и узел решения систем управлений.
Из приемников 3.1-3.3 поступают эфемериды навигационных спутников хi, yi, zi,  дальномеры 4.1-4.3 выдают измеренные значения дальности di. Узел решения систем уравнений выдает решения указанных систем уравнений xi, yi, zi,
дальномеры 4.1-4.3 выдают измеренные значения дальности di. Узел решения систем уравнений выдает решения указанных систем уравнений xi, yi, zi,  методом итераций (для него команды поступают из блока 6 памяти).
методом итераций (для него команды поступают из блока 6 памяти).
Алгебраические сумматоры определяют разности 

 квадраторы возводят эти разности в квадрат, дифференциаторы вычисляют произведения
квадраторы возводят эти разности в квадрат, дифференциаторы вычисляют произведения 
Другие алгебраические сумматоры определяют суммы, определяют суммы, стоящие в левых частях уравнений (1) и (2). Компараторы (разновидность алгебраических сумматоров) приравнивают левые и правые части этих уравнений, причем для получения правой части уравнения (2), т.е.  используются соответствующие дифференциатор и умножитель. Результаты решения уравнений вводятся в блок памяти, где хранятся до востребования промежуточных и конечных результатов расчетов.
используются соответствующие дифференциатор и умножитель. Результаты решения уравнений вводятся в блок памяти, где хранятся до востребования промежуточных и конечных результатов расчетов.
Дополнительный дифференциатор вычисляет разности скоростей поездов ΔV путем дифференцирования текущего расстояния между локомотивом и хвостовым вагоном впереди идущего поезда вдоль криволинейного в общем случае железнодорожного пути. Эта информация снимается с выхода измерителя рельсового локатора 7.
Супергетеродинные приемники 3.1-3.3 работают в диапазоне единицы гигагерц. Дальномеры 4.1-4.3 корреляционного типа, поскольку в системе используется ФМн-сигналы.
Таким образом, предлагаемое устройство по сравнению с прототипом и другими техническими решениями аналогичного назначения обеспечивает повышение надежности дуплексной связи между диспетчерским пунктом и локомотивами. Это достигается путем использования сложных сигналов с фазовой манипуляцией и двух частот ω1 и ω2. Указанные сигналы обладают энергетической и структурной скрытностью и позволяют применять структурную селекцию.
Энергетическая скрытность данных сигналов обусловлена их высокой сжимаемостью во времени и по спектру при оптимальной обработке, что позволяет снизить мгновенную излучаемую мощность. Вследствие этого сложный ФМн-сигнал в точке приема может оказаться замаскированным шумами и помехами. Причем энергия сложного сигнала отнюдь не мала, она просто распределена по частотно-временной области так, что в каждой точке этой области мощность сигнала меньше мощности шумов и помех.
Структурная скрытность сложных ФМн-сигналов обусловлена большим разнообразием их форм и значительными диапазонами изменений параметров, что затрудняет оптимальную или хотя бы квазиоптимальную обработку сложных ФМн-сигналов априорно неизвестной структуры с целью повышения чувствительности приемника.
Сложные ФМн-сигналы открывают новые возможности в технике передачи сообщений между локомотивами и диспетчерским пунктом, указанные сигналы позволяют применять новый вид селекции - структурную селекцию. Это значит, что появляется новая возможность разделять сигналы, действующие в одной и той же полосе частот и в одни и те же промежутки времени. Принципиально можно отказаться от традиционного метода разделения рабочих частот используемого диапазона между работающими радиостанциями и селекцией их на приемной стороне с помощью частотных фильтров. Его можно заменить новым методом, основанным на одновременной работе каждой радиостанции во всем диапазоне частот сигналами со сложной структурой с выделением радиоприемным устройством необходимой радиостанции посредством его структурной селекции.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2011 |
|
RU2464592C1 |
| СПОСОБ ТОЧНОГО ПОЗИЦИОНИРОВАНИЯ И МОНИТОРИНГА МОБИЛЬНЫХ ОБЪЕКТОВ | 2008 |
|
RU2365932C1 |
| ТЕРРИТОРИАЛЬНАЯ СИСТЕМА КОНТРОЛЯ ДВИЖЕНИЯ СПЕЦИАЛЬНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2014 |
|
RU2582502C2 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2003 |
|
RU2256894C1 |
| СИСТЕМА МЕСТООПРЕДЕЛЕНИЯ И ДИСПЕТЧЕРИЗАЦИИ МОБИЛЬНЫХ БРИГАД СКОРОЙ ПОМОЩИ | 2004 |
|
RU2278418C2 |
| СИСТЕМА ДИСТАНЦИОННОГО КОНТРОЛЯ И УПРАВЛЕНИЯ РАКЕТНО-КОСМИЧЕСКИМ КОМПЛЕКСОМ НА СТАРТОВОЙ ПОЗИЦИИ | 2010 |
|
RU2427508C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА АВАРИЙНОГО И ЭКОЛОГИЧЕСКОГО МОНИТОРИНГА ОКРУЖАЮЩЕЙ СРЕДЫ РЕГИОНА | 2006 |
|
RU2324957C1 |
| СПОСОБ РАННЕГО ОБНАРУЖЕНИЯ ПОЖАРА И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2409865C1 |
| ЗАПРОСНЫЙ СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2389040C1 |
| СПУТНИКОВАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ СУДОВ И САМОЛЁТОВ, ПОТЕРПЕВШИХ АВАРИЮ | 2001 |
|
RU2201601C2 |


Изобретение относится к устройствам железнодорожной автоматики, телемеханики и связи. Устройство содержит навигационные искусственные спутники Земли (ИСЗ) 1.1-1.3, локомотив 2, приемники 3.1-3.3, дальномеры 4.1-4.3, блок 5 формирования сигналов местоположения поезда, блок 6 памяти, рельсовый локатор 7, блок 8 контроля и регулирования скорости поезда, локомотивный дисплей 9, цифроаналоговый преобразователь 10, локомотивную радиостанцию 11, спутник связи 12, диспетчерский пункт 13, блок 14 обработки информации, радиостанцию 15 диспетчерского пункта и дисплей 16 диспетчерского пункта. Каждая радиостанция содержит генератор высокочастотных колебаний, фазовый манипулятор, формирователь дискретных сообщений, первый смеситель, первый гетеродин, усилитель первой промежуточной частоты, первый усилитель мощности, дуплексер, приемо-передающую антенну, второй усилитель мощности, второй смеситель, второй гетеродин, усилитель второй промежуточной частоты, перемножитель, полосовой фильтр и фазовый детектор. Техническим результатом изобретения является повышение надежности дуплексной связи между диспетчерским пунктом и локомотивами путем использования сложных сигналов с фазовой манипуляцией. 5 ил.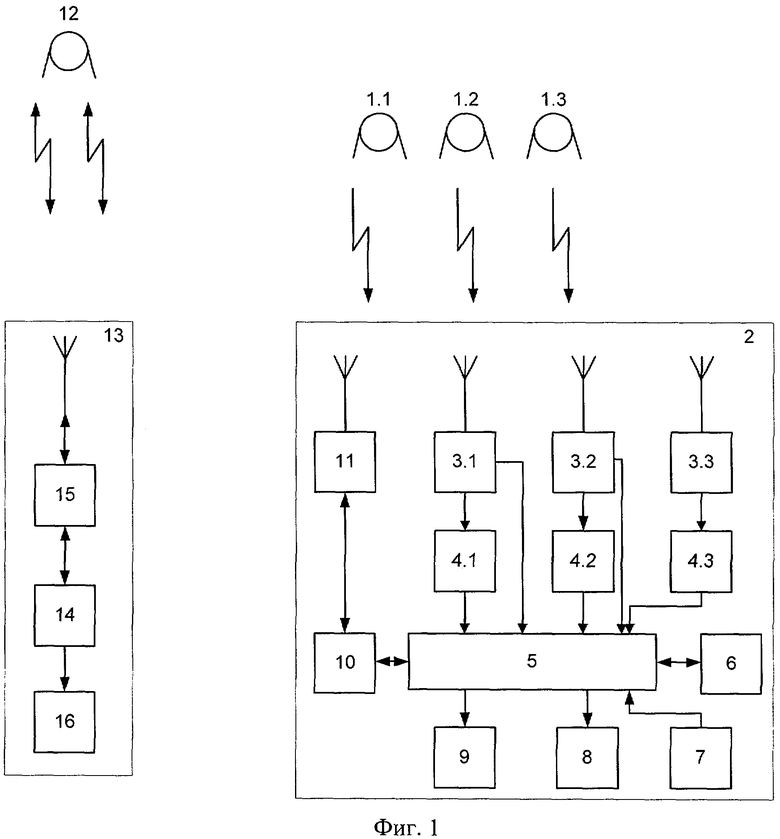
Устройство для управления движением поездов с помощью искусственных спутников Земли, содержащее установленные на каждом локомотиве приемники передаваемых с искусственных спутников Земли сигналов, выход каждого из которых связан с входом соответствующего из дальномеров, выходами подключенных к входам блока формирования сигналов местоположения поезда путем решения навигационных уравнений, подключенного к выходу рельсового локатора и связанного выходами с входом блока контроля и регулирования скорости движения поезда, входом блока памяти, входом локомотивного дисплея и через цифроаналоговый преобразователь - с входом радиостанции, выполненной с возможностью передачи сигналов через спутник связи на диспетчерский пункт, на котором установлен блок обработки информации, связанный с радиостанцией и дисплеем, отличающееся тем, что каждая радиостанция выполнена в виде последовательно включенных генератора высокочастотных колебаний, фазового манипулятора, второй вход которого соединен с выходом формирователя дискретных сообщений, первого смесителя, второй вход которого соединен с выходом первого гетеродина, усилителя первой промежуточной частоты, первого усилителя мощности, дуплексера, вход-выход которого связан с приемо-передающей антенной, второго усилителя мощности, второго смесителя, второй вход которого соединен с выходом второго гетеродина, усилителя второй промежуточной частоты, перемножителя, второй вход которого соединен с выходом первого гетеродина, полосового фильтра и фазового детектора, второй вход которого соединен с выходом второго гетеродина, а выход является выходом радиостанции, причем радиостанция, установленная на локомотиве, излучает сложный сигнал с фазовой манипуляцией на несущей частоте ω1, а принимает - на несущей частоте ω2, а радиостанция, установленная на диспетчерском пункте, излучает сложный сигнал с фазовой манипуляцией на несущей частоте ω2, а принимает - на несущей частоте ω1.
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ С ПОМОЩЬЮ ИСКУССТВЕННЫХ СПУТНИКОВ ЗЕМЛИ | 1992 |
|
RU2092355C1 |
| РЕГИОНАЛЬНАЯ ИНФОРМАЦИОННАЯ СИСТЕМА СВЯЗИ | 2004 |
|
RU2264034C1 |
| СПОСОБ СОВМЕЩЕННОЙ РАДИОСВЯЗИ И РАДИОНАВИГАЦИИ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ, ДЛЯ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 1996 |
|
RU2108252C1 |
| СПОСОБ КОНТРОЛЯ ПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ, НАПРИМЕР ПОДВИЖНЫХ ЖЕЛЕЗНОДОРОЖНЫХ СОСТАВОВ, И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1996 |
|
RU2115140C1 |
| DE 19735161 С1, 02.09.1999. | |||

