Изобретение относится к мобильной робототехнике, предназначенной для борьбы с загрязнениями окружающей среды, в частности к техническим средствам сбора нефти при аварийных разливах.
Известен нефтесборщик барабанного типа (Пат. RU 44691), выполненный в виде вращающихся щеток.
Недостатком известного устройства является невозможность самостоятельного передвижения нефтесборщика, в частности по пересеченной местности.
Известен робот (Пат. RU 37637), содержащий платформу с двумя приводными и с двумя самоориентирующимися колесами.
Недостатком известной конструкции робота является отсутствие устройства сбора нефти и ограниченные возможности при движении в среде с препятствиями.
Цель изобретения - расширение функциональных возможностей робота.
Цель достигается тем, что робот-нефтесборщик содержит два независимо управляемых колеса, опорные самоориентирующиеся колеса, дополнительные колеса с плицами и нефтесборное устройство, причем самоориентирующиеся колеса, колеса с плицами и нефтесборное устройство выполнены выдвижными на продольных рычагах, при этом выдвижные продольные рычаги самоориентирующихся колес и нефтесборного устройства выполнены кинематически связанными между собой.
Отличительными признаками заявляемого изобретения в сравнении с прототипом является то, что робот-нефтесборщик содержит дополнительные колеса с плицами и нефтесборное устройство, причем самоориентирующиеся колеса, колеса с плицами и нефтесборное устройство выполнены выдвижными на продольных рычагах, при этом выдвижные продольные рычаги самоориентирующихся колес и нефтесборного устройства выполнены кинематически связанными между собой.
Изобретение поясняется чертежами, где:
на фиг.1 изображена кинематическая схема робота-нефтесборщика;
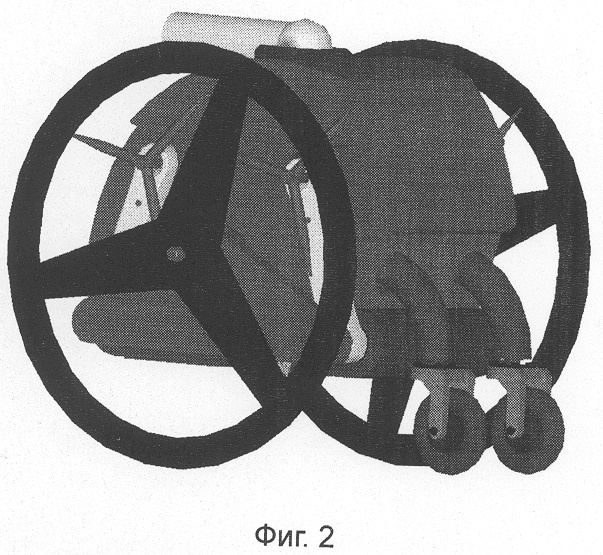
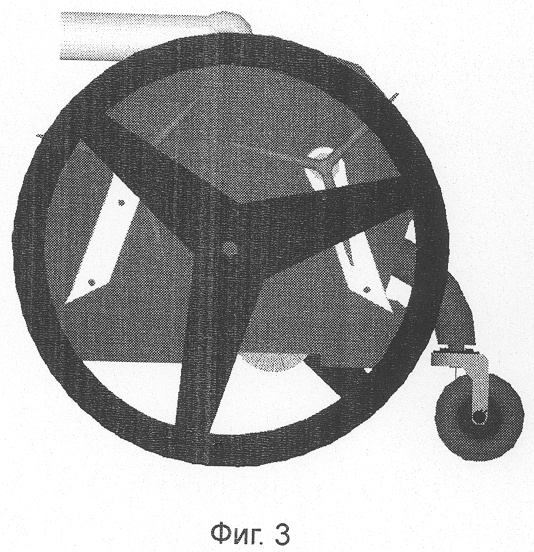
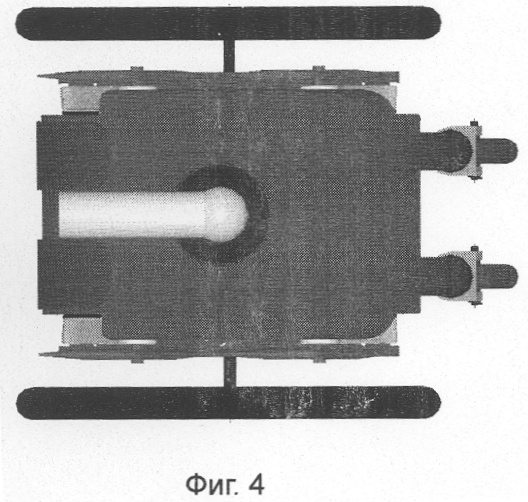
на фиг.2, 3, 4 - робот-нефтесборщик с задвинутыми плицевыми колесами, нефтесборным устройством и выдвинутыми самоориентирующимися колесами (аксонометрия, вид сбоку, вид сверху);
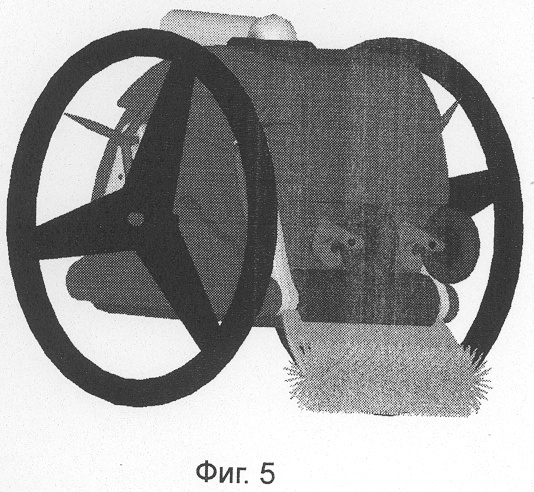
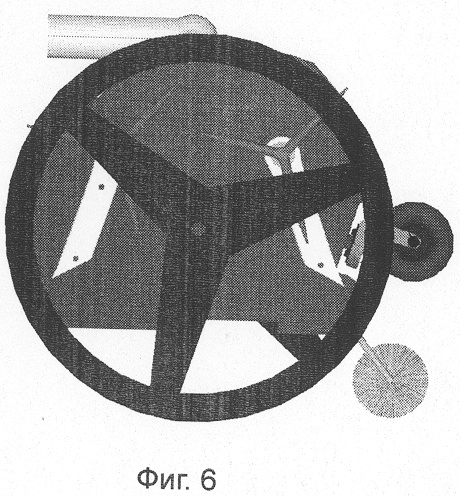
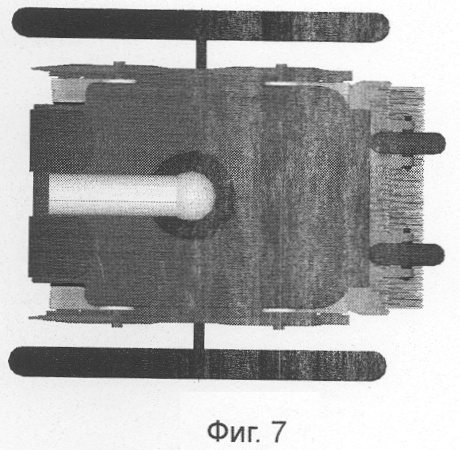
на фиг.5, 6, 7 - робот-нефтесборщик с задвинутыми плицевыми колесами, самоориентирующимися колесами и выдвинутым нефтесборным устройством (аксонометрия, вид сбоку, вид сверху);
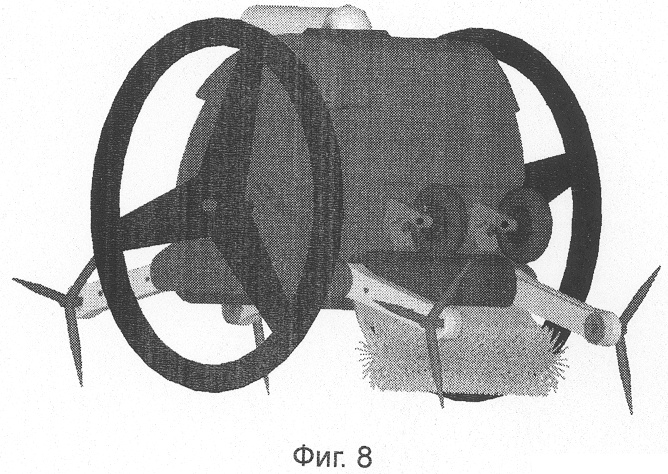
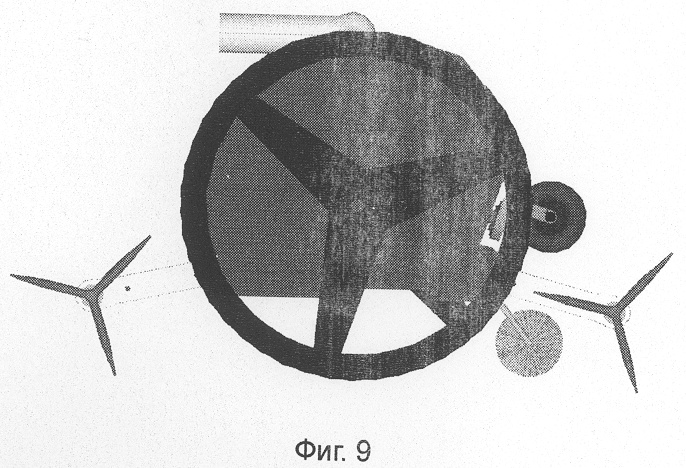
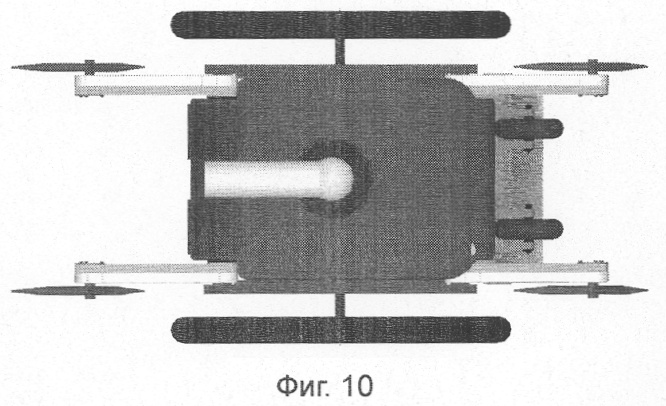
на фиг.8, 9, 10 - робот-нефтесборщик с выдвинутыми плицевыми колесами, нефтесборным устройством и задвинутыми самоориентирующимися колесами (аксонометрия, вид сбоку, вид сверху);
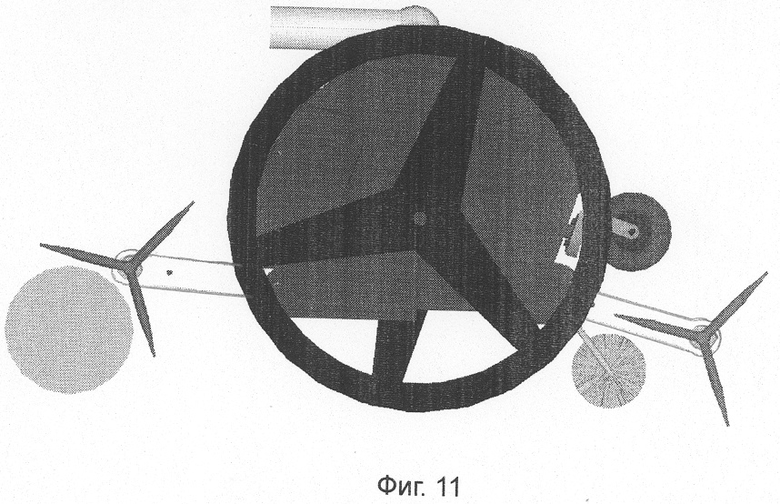
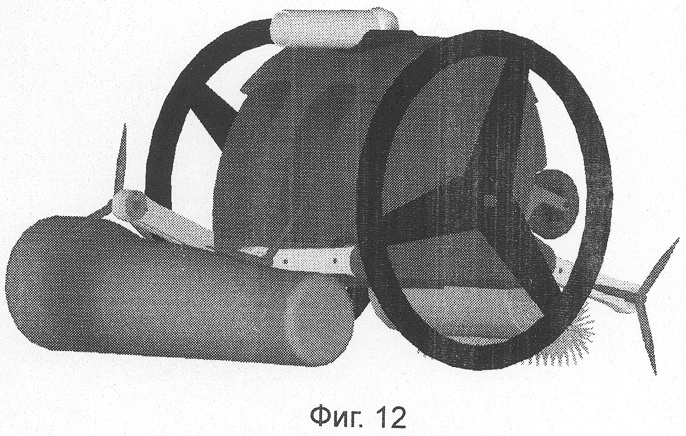
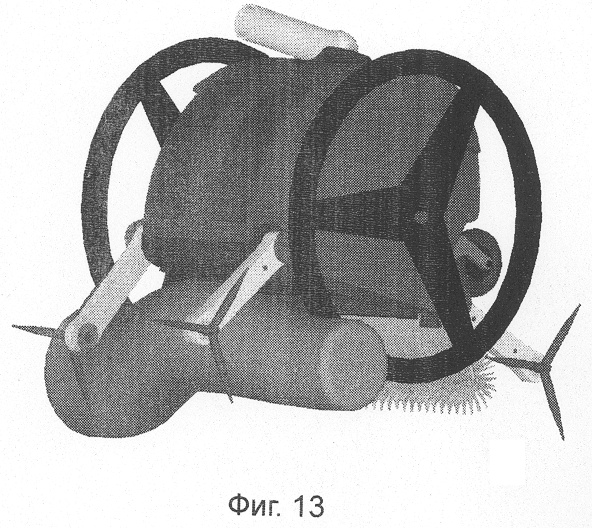
На фиг.11, 12, 13, 14, 15 - схема передвижения робота-нефтесборщика через препятствие.
Робот-нефтесборщик содержит корпус 1, два независимо управляемых колеса 2 от приводов 3, размещенные на продольных рычагах 4 опорные самоориентирующиеся колеса 5 и нефтесборное устройство в виде вращающейся от привода 7 щетки 6 с нефтеприемником 8, а также размещенные на поворотных продольных рычагах 9 плицевые колеса 10. Продольные поворотные рычаги 9 связаны с приводом 11. Плицевые колеса 10 кинематически связаны с приводом 3 посредством ременных зубчатых передач 12 и 13. Продольные рычаги 4 связаны с приводом 14 посредствам ременной зубчатой передачи 15. Приводы 3 содержат управляемые муфты 16.
Робот-нефтесборщик работает следующим образом. При движении по ровным горизонтальным поверхностям плицевые колеса 10 задвинуты в корпус 1, при этом самоориентирующиеся колеса 5 выдвинуты. Поворот или разворот робота обеспечивается независимым управлением приводами 3. При необходимости преодоления препятствий из корпуса 1 выдвигаются плицевые колеса 10, при этом переключаются управляемые муфты 16 и вращение от приводов 3 передается плицевым колесам 10. Для сбора нефти выдвигается нефтесборное устройство 6, при этом самоориентирующиеся колеса 5 задвигаются в корпус робота.
Построенный по данной схеме робот-нефтесборщик обладает широкими функциональными возможностями. Данный робот-нефтесборщик с дистанционным управлением, способный работать в автоматизированном режиме, повышает эффективность и безопасность ликвидации аварийных разливов нефти.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОБИЛЬНАЯ ПЛАТФОРМА | 2005 |
|
RU2307760C2 |
| АВТОМАТИЗИРОВАННЫЙ СПОСОБ СБОРА НЕФТИ С ВОДНОЙ ПОВЕРХНОСТИ | 2005 |
|
RU2318957C2 |
| Способ сбора аварийных разливов жидких углеводородов с поверхности судоходных водоёмов и рек и устройство для его осуществления | 2022 |
|
RU2785155C1 |
| СПОСОБ СБОРА, УДАЛЕНИЯ НЕФТИ С ПОВЕРХНОСТИ ВОДОЕМА, УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2475590C2 |
| АГРЕГАТ ДЛЯ СБОРА НЕФТИ И НЕФТЕПРОДУКТОВ С ЗАГРЯЗНЕННОЙ ПОВЕРХНОСТИ БОЛОТ | 2010 |
|
RU2460662C2 |
| Устройство для сбора нефти с поверхности грунта | 1990 |
|
SU1772319A1 |
| УСТРОЙСТВО ДЛЯ СБОРА НЕФТЕПРОДУКТОВ С ПОВЕРХНОСТИ ВОДЫ | 2013 |
|
RU2535744C1 |
| МОБИЛЬНАЯ АВТОНОМНАЯ РОБОТОТЕХНИЧЕСКАЯ ПЛАТФОРМА С БЛОЧНОЙ ИЗМЕНЯЕМОЙ СТРУКТУРОЙ | 2019 |
|
RU2704048C1 |
| УСТРОЙСТВО ДЛЯ СБОРА НЕФТИ | 2014 |
|
RU2658364C2 |
| МОБИЛЬНЫЙ РОБОТ | 1991 |
|
RU2026227C1 |
Изобретение относится к области мобильной робототехники, в частности к техническим средствам сбора нефти. Робот-нефтесборщик содержит два независимо управляемых колеса, опорные самоориентирующиеся колеса, а также колеса с плицами и нефтесборное устройство. При этом самоориентирующиеся колеса, колеса с плицами и нефтесборное устройство выполнены выдвижными на продольных рычагах. Причем продольные рычаги самоориентирующихся колес и нефтесборного устройства кинематически связанными между собой, а колеса с плицами связаны с приводом в их выдвинутом положении. Техническим результатом является расширение функциональных возможностей робота. 15 ил.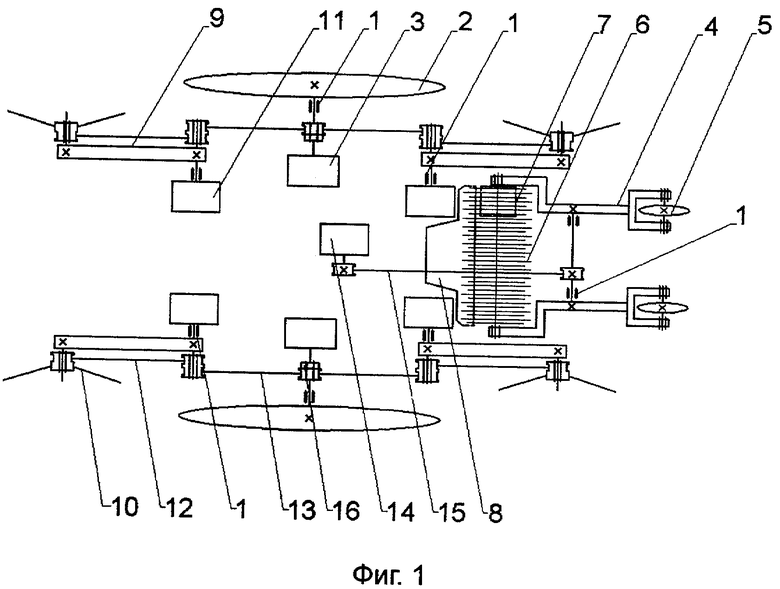
Робот-нефтесборщик, включающий два независимо управляемых колеса, опорные самоориентирующиеся колеса, а также колеса с плицами и нефтесборное устройство, при этом самоориентирующиеся колеса, колеса с плицами и нефтесборное устройство выполнены выдвижными на продольных рычагах, продольные рычаги самоориентирующихся колес и нефтесборного устройства кинематически связанными между собой, а колеса с плицами связаны с приводом в их выдвинутом положении.
| Сигнальное приспособление к автомобилю для указания направления его движения | 1928 |
|
SU37637A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО С КОЛЕСНО-ШАГАЮЩИМИ ДВИЖИТЕЛЯМИ М.И.ЛОВЧИКОВА | 1992 |
|
RU2031040C1 |
| САМОХОДНОЕ КРЕСЛО ДЛЯ ИНВАЛИДОВ | 1991 |
|
RU2033125C1 |
| ЧАСТОТНЫЕ РАЗНЕСЕНИЯ ДЛЯ ПРЕДОТВРАЩЕНИЯ ПОМЕХ, ВЫЗВАННЫХ СИГНАЛАМИ ИНТЕРМОДУЛЯЦИОННОГО ИСКАЖЕНИЯ | 2017 |
|
RU2742973C1 |
| US 3241848, 22.03.1966. | |||

