Изобретение относится к транспортным средствам с колесно-шагающими движителями. Преимущественная область использования изобретения - транспортные средства повышенной проходимости.
Уровень техники определяется следующими аналогами.
Первый аналог. Одним из направлений повышения проходимости является установка элемента движителя, соприкасающегося с грунтом, на одной стороне рычага, а другой конец рычага шарнирно соединен с ходовой частью. Минимальное количество рычагов - два, они жестко соединены друг с другом под тупым углом, образуя коромысло. Элементом движителя, соприкасающимся с грунтом, является колесо, приводимое во вращение от двигателя. Вершина коромысла направлена в сторону от грунта; один рычаг соединен через привод с ходовой частью. Коромысла установлены по сторонам ходовой части спереди, позади установлено по одному колесу с каждой стороны. При подъезде к препятствию привод поднимает плечо коромысла с передним колесом, заднее колесо коромысла будет продолжать катиться по грунту, а переднее колесо "нашагнет" на препятствие и, продолжая вращение от двигателя, вместе с подъемом другого колеса от привода обеспечит переезд обоих колес через препятствие.
Недостатком известного решения являются недостаточная высота преодолеваемых препятствий, т.к. коромысло не может вращаться, и сложность управления - сложность эксплуатации.
Второй аналог - машины Локхид. Движитель содержит три рычага, установленных под углом 120о друг к другу. Движители установлены по сторонам ходовой части. На мягких грунтах рычаги вращаются так, что каждый трехколесный узел действует как одно колесо, оборудованное большими цилиндрическими грунтозацепами.
Третий аналог - движитель содержит четыре рычага, на концах рычагов установлены стопы или колеса.
Четвертый аналог. Другим направлением повышения проходимости является установка движителя на оси вращения с эксцентриситетом. Например, приспособление для подъема по лестнице, например инвалидной коляски, представляющее собой две пары ходовых колес, которые поворачиваются на отдельных эксцентриковых валах с общим приводом и накатываются таким образом на лестничную ступеньку или скатываются с нее.
Пятый аналог. Движитель может быть выполнен в виде равнобедренного треугольника с колесами, размещенными на углах, приводимыми во вращение одновременно с треугольником, соединенным с корпусом ручной тележки осью вращения, расположенной эксцентрично относительно геометрического центра треугольника.
Указанные аналоги не обеспечивают плавности хода (постоянство величины клиренса) ходовой части в шагающем режиме при движении по твердому ровному грунту.
Шестой аналог. Другим направлением повышения проходимости является использование некруглых колес в сочетании с планетарным редуктором. Так, известен движитель транспортного средства, содержащий некруглое колесо переменного радиуса качения, состоящее из одинаковых выпуклых дуг, симметрично расположенных относительно его вала, соединенного посредством механической передачи с приводом вращения, при этом механическая передача выполнена в виде планетарного редуктора, эпицикл которого жестко соединен с корпусом транспортного средства, водило - с приводом вращения, а сателлит - с валом. Эпицикл и сателлит выполнены в виде зубчатых колес, которые зацеплены между собой посредством паразитной шестерни, шарнирно установленной на водиле. Эпицикл и сателлит выполнены в виде звездочек, зацепленных между собой посредством цепи.
Недостатком этого аналога (и предшествующих тоже) является ограничение высоты препятствия, которое он может преодолеть. Препятствие не может быть больше максимального диаметра колеса.
Седьмой аналог. Другим направлением повышения проходимости является использование движителей, поочередно перекатывающихся друг через друга. Так, известен колесно-шагающий движитель транспортного средства, содержащий колесо, основной рычаг, установленный поворотно в корпусе транспортного средства привод вращения рычага и колеса, кинематическую передачу, расположенную в основном рычаге, состоящую из солнечной шестерни с паразитной шестерней, сателлита и блока переменного сцепления солнечной шестерни с корпусом и с основным рычагом, при этом в основном рычаге установлена вторая паразитная шестерня с сателлитом, развернутая вокруг оси колеса относительно первой шестерни на 180о, колесо состоит из двух сегментов, снабженных дополнительными рычагами с расположенными в них дополнительными кинематическими передачами, ведомые звенья которых жестко соединены своими осями с сегментами, ведущие жестко соединены с основным рычагом соосно с осями сателлитов, а дополнительные рычаги жестко установлены на осях последних.
В колесно-шагающем режиме один из сегментов, контактирующий с грунтом, перекатывается по нему, а другой ускоренно перемещается над поверхностью грунта до соприкосновения с ним. В этот момент оба сегмента находятся друг от друга на расстоянии, равном шагу. Корпус транспортного средства за это время переместится на величину, равную половине шага. Далее сегмент, который до этого находился в контакте с грунтом, отрывается от него и перемещается аналогично тому, как было описано выше.
Недостатком известного решения является малая высота преодолеваемых препятствий, не превышающих величины радиуса сегмента.
Восьмой аналог (прототип). Известен вездеход с шагающими колесными движителями, содержащий ходовую часть и в каждом движителе ведущий вал, коромысло, кинематически связанное с ведущим валом, колеса, оси которых установлены по краям коромысла с возможностью вращения в ту же сторону, что и коромысло, при этом величина расстояния между осями колес на коромысле более величины внешнего диаметра колеса, редуктор. При вращении привода вращение передается на оси, при этом коромысла начинают вращаться так, что одни колеса остаются на опорной поверхности, а другие колеса поднимаются, описывают в воздухе дугу и опускаются на опорную поверхность, т.е. игрушка делает один шаг. Затем наоборот. Вместе с этим игрушка то приподнимается над опорной поверхностью, то опускается.
Недостатком известного решения являются недостаточная надежность преодоления препятствия, т.к. колеса не являются ведущими, и изменение величины высоты клиренса при движении по твердому ровному грунту.
Целью изобретения является удовлетворение общественной потребности на вездеходы с колесными шагающими движителями, обладающими повышенной надежностью в преодолении препятствий и удобствами эксплуатации.
При осуществлении изобретения может быть получен следующий технический результат: повышение надежности в преодолении препятствий, размер высоты которых больше величины диаметра колеса, и стабилизация значения величины клиренса при движении по твердому, ровному грунту.
Этот технический результат достигается тем, что в транспортном средстве с колесно-шагающими движителями, каждый из которых выполнен в виде жестко установленного по центру на приводном валу коромысла, на концах которого с возможностью вращения закреплены колеса, эти колеса выполнены приводными через кинематическую связь с валом коромысла и установлены на своих валах эксцентрично. Кроме того, указанная кинематическая связь выполнена в виде планетарного механизма с приводом на водило, которое содержит два диаметрально расположенных сателлита, установленных на валах колес, солнечная шестерня жестко закреплена на корпусе транспортного средства и соединена с сателлитами через промежуточные шестерни для обеспечения однонаправленного вращения коромысла и колес. Коромысла отдельных движителей установлены со сдвигом по фазе относительно друг друга на угол, величина которого не превышает 90о.
Причинно-следственная связь между совокупностью существенных признаков изобретения и достигаемого технического результата состоит в том, что колеса выполнены ведомыми, что увеличивает надежность сцепления колеса с вершиной высокого препятствия, колеса установлены по краям сдвоенного водила (коромысла) планетарного редуктора, что колеса установлены на эксцентрично расположенных осях вращения, являющихся осями вращения двух сателлитов, что колеса установлены так, что могут работать, в частности величина наружного радиуса сателлита меньше расстояния между центром вращения колеса и ближайшей точкой внешней окружности, что сателлиты не могут непосредственно быть сцепленными с эпициклом (иначе коромысло будет цепляться за грунт), что коромысла отдельных движителей сдвинуты относительно друг друга на угол, величина которого не превышает 90о.
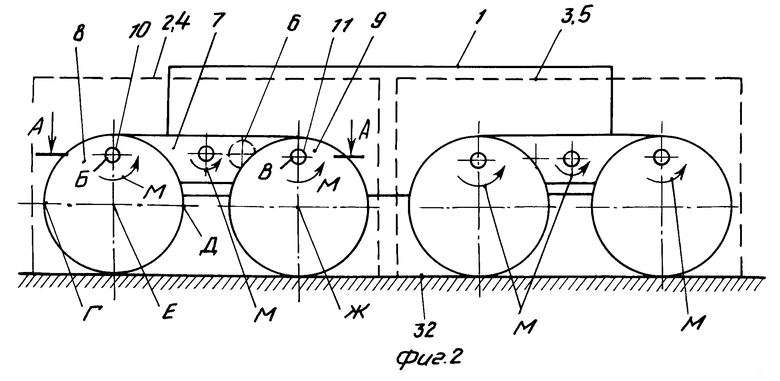
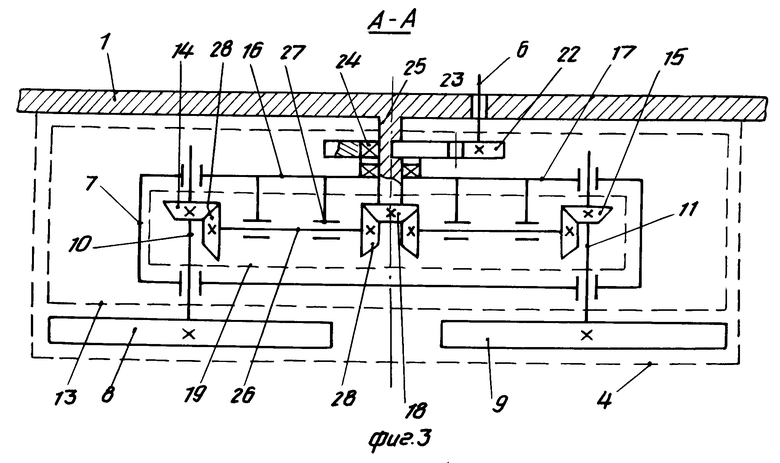
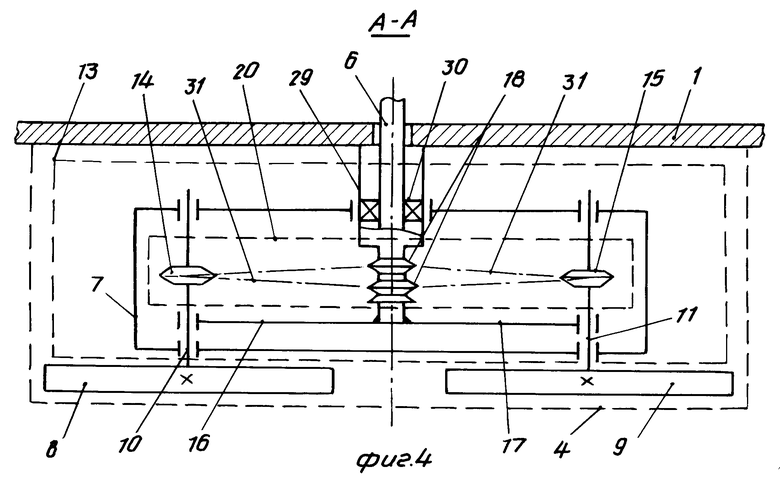
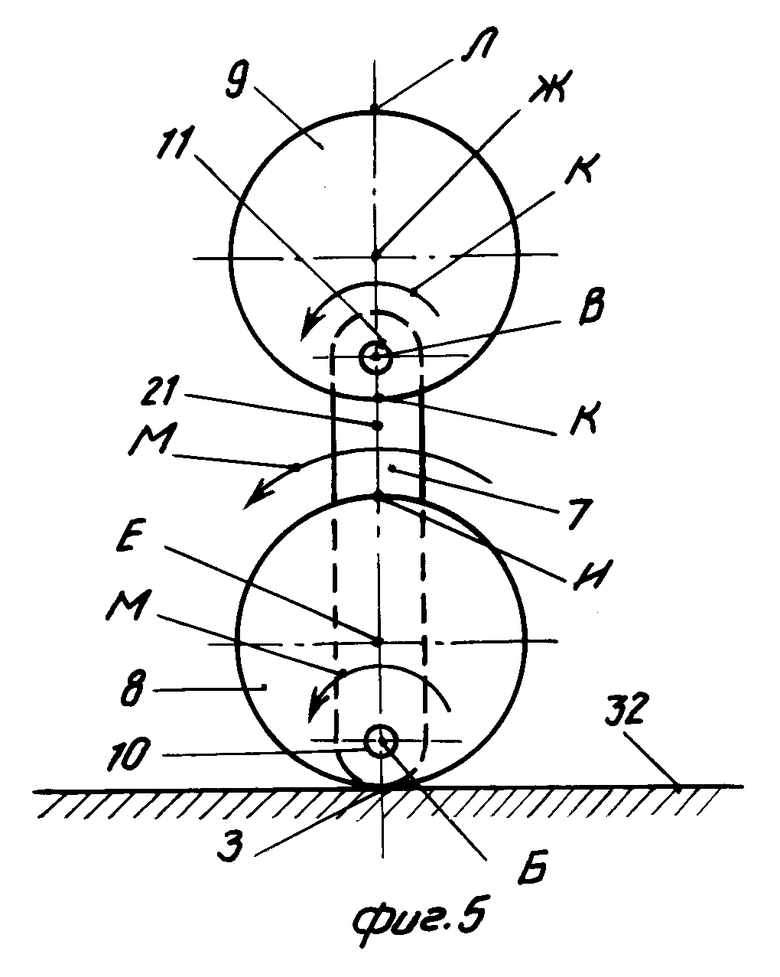
На фиг. 1 показан вид в плане транспортного средства с шагающими колесными движителями (ходовые колеса здесь и далее показаны без шин); на фиг. 2 - то же, вид сбоку; на фиг. 3 и 4 - разрез А-А на фиг. 2 (кинематические схемы планетарных редукторов даны на фиг. 2 с коническими передачами, на фиг. 3 с цепными передачами); на фиг. 5 - промежуточное положение шагающего колесного движителя, когда коромысло перпендикулярно грунту; на фиг. 6 - транспортное средство, вид сбоку, при рассогласовании в положениях коромысел различных движителей; на фиг. 7 - положение движителя после полушага; на фиг; 8 - начальная стадия преодоления препятствия транспортным средством; на фиг; 9 - промежуточная стадия преодоления препятствия транспортным средством; на фиг. 10 - положение движителя после полного шага.
Транспортное средство с шагающими колесными движителями (на примере вездехода с четырьмя движителями, число движителей может быть и иным) содержит корпус 1 и в каждом из движителей 2-5 ведущий вал 6, коромысло 7, кинематически связанное с ведущим валом 6 (связь не показана), колеса 8 и 9, оси 10 и 11 которых установлены по краям 12 коромысла 7 с возможностью вращения в ту же сторону, что и коромысло 7, при этом (фиг. 2) величина расстояния между осями 10 и 11 колес 8 и 9 на коромысле 7 (величина расстояния между точками Б и В) более величины внешнего диаметра колеса 8 (величины расстояния между точками Г и Д), редуктор 13.
Новыми признаками являются следующие.
Редуктор 13 выполнен (фиг. 3) планетарным с двумя сателлитами 14 и 15, установленными на соответствующих осях 10 и 11 колес 8 и 9, водило выполнено сдвоенным (из двух водил 16 и 17) в виде коромысла 7, солнечная шестерня 18 соединена неподвижно с корпусом 1 и соединена с сателлитами 14 и 15 цилиндрическими (не показаны) или коническими 19 передачами или (фиг. 4) гибкими, в частности, цепными передачами 20, обеспечивающими одинаковые направления и значения скоростей вращения коромысла и сателлитов, колеса 8 и 9 установлены (фиг. 2) на эксцентрично расположенных осях 10 и 11 вращения с одинаковой величиной эксцентриситета (величина расстояния между точками Б и Е колеса 8 и точками В и Ж колеса 9 одинаковы, где Б и В - центры осей 10 и 11, а Е и Ж - геометрические центры колес 8 и 9 соответственно), а в положении колес 8 и 9, когда их диаметры 3И и КЛ, проходящие (фиг. 5) через геометрические центры Е и Ж колес и центры Б и В осей вращения, совпадают с продольной осью 21 коромысла 7, равновеликие плечи эксцентриситета (например, БИ и ВЛ) направлены от осей вращения 10 и 11 колес 8 и 9 в одну сторону (на фиг. 5 вверх), величина наружного радиуса сателлитов 14 и 15 (фиг. 3 и 4) меньше расстояния (фиг. 5) между центром Б оси 10 вращения колеса и ближайшей точкой З внешней окружности колеса 8.
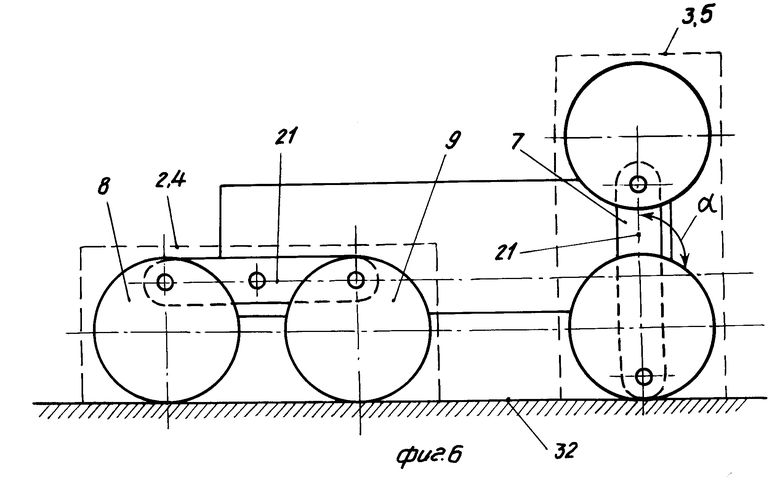
Кроме того, коромысла 7 отдельных движителей, например 2, 4 и 3, 5, сдвинуты по фазе (фиг. 6) относительно друг друга на угол α, величина которого не превышает 90о (величина угла между продольными осями 21 коромысел 7 движителей 2, 4 и 3, 5).
Ведущий вал 6 может быть соединен либо с общим двигателем для всех четырех движителей 2-5, либо с индивидуальным двигателем для каждого движителя и может вращаться в любую сторону, обеспечивая прямой и обратный ходы.
Приведем описание изображенного на чертежах.
Из фиг. 1 и 2 видно, что вездеход с шагающими колесными движителями содержит корпус 1, четыре шагающих колесных движителя 2-5 и в каждом движителе ведущий вал 6, коромысло 7, кинематически связанное с ведущим валом 6, колеса 8 и 9, оси 10 и 11 которых установлены по краям 12 коромысла 7 с возможностью вращения в ту же сторону, что и коромысло 7.
На фиг. 2 дополнительно показано, что колеса 8 и 9 в движителе 4 (и во всех движителях 2-5) установлены на эксцентрично расположенных осях 10 и 11 вращения с одинаковой величиной эксцентриситета (величина расстояний между точками Б и Е колеса 8 и точками Г и Ж колеса 9 одинакова, где Б и Г - центры осей 10 и 11, В и Ж - геометрические центры колес 8 и 9 соответственно), при этом величина расстояния между осями 10 и 11 колес 8 и 9 на коромысле 7 (величина расстояния между точками Б и В) более величины внешнего диаметра (расстояния между точками Г и Д) колеса 8 (колеса 8 и 9, как и остальные, одинаковые). Коромысла и колеса могут вращаться по стрелкам М при прямом ходе с одинаковой угловой скоростью.
На фиг. 3 показано, что из корпуса 1 выступает ведущий вал 6, на торце которого установлена шестерня 22, соединенная с шестерней 23, через которые вращение передается через сдвоенные водила 16 и 17 коромыслу 7, выполненному полым. Коромысло 7 установлено на подшипниках 24 с возможностью вращения относительно стержня 25, на торце которого установлена коническая солнечная шестерня 18, неподвижная относительно корпуса 1. Внутри коромысла 7 установлены на осях 10 и 11 конические сателлиты 14 и 15, соединенные с солнечной шестерней 18 коническими передачами 19. Каждая коническая передача включает вал 26, установленный на опорах и подшипниках 27 на коромысле 7 и снабженный на торцах коническими шестернями 28. На осях 10 и 11 установлены колеса 8 и 9. Коромысло 7 и оси 10 и 11 вращаются от ведущего вала 6 в одну заданную сторону.
На фиг. 4 показано, что из корпуса 1 выступает ведущий вал 6, проходящий через солнечные шестерни 18, выполненные в виде звездочек, неподвижно соединенных с корпусом 1 полым стержнем 29, внутри которого установлены подшипники 30. Ведущий вал 6 заканчивается сдвоенными водилами 16 и 17, расположенными на одной линии. Внутри полого коромысла 7 установлены на осях 10 и 11 звездочные сателлиты 14 и 15, соединенные образующей две восьмерки бесконечной цепью 31 с солнечной шестерней 18. Сверху каждого сателлита 14 и 15 нисходящие ветви цепи 31 идут снизу нижней на чертеже солнечной шестерни 18, а снизу каждого сателлита 14 и 15 восходящие ветви цепи 31 идут сверху верхней на чертеже солнечной шестерни 18. На осях 10 и 11 установлены колеса 8 и 9. Коромысло 7 и оси 10 и 11 вращаются от ведущего вала 6 в одну заданную сторону.
На фиг. 5 показано промежуточное положение любого движителя, в частности движителя 4, при вращении коромысла 7 и колес 8 и 9 против часовой стрелки по стрелкам М в момент времени, когда их диаметры ЗИ и КЛ, проходящие через геометрические центры Е и Ж колес и центры Б и В осей вращения 10 и 11 совпадают с продольной осью 21 коромысла 7 (которое в этот момент времени занимает вертикальное положение), равновеликие плечи эксцентриситета (например, БИ и ВЛ) направлены от осей вращения 10 и 11 колес 8 и 9 в одну сторону, величина радиуса сателлитов 14 и 15 (фиг. 3 и 4) меньше расстояния на фиг. 5 между центром Б оси 10 вращения колеса и ближайшей точкой З внешней окружности колеса 8, соприкасающейся с грунтом 32. Величина расстояния между точками З и К равна максимальной величине высоты преодолеваемого препятствия.
На фиг. 6 показано, что у движителей 3 и 5 ось 21 коромысла 7 сдвинута относительно оси 21 коромысла 7 движителей 2 и 4 на угол α, например на 90о, так что в момент времени, зафиксированный на чертеж, из восьми колес касается грунта 32 только шесть колес.
Движение вездехода с колесными шагающими движителями иллюстрируется фигурами 2, 5, 7, 8, 9, и 10.
На фиг. 2 вездеход контактирует с грунтом 32 всеми колесами. Но так как коромысла 7 и все колеса, установленные на них, вращаются в одну сторону, например против часовой стрелки, то вскоре колесо 9 (далее рассматривается перемещение только движителя 4) оторвется от грунта и, двигаясь по дуге, через какое-то время будет расположено над колесом 8, которое будет продолжать все это время катиться по грунту 32. Это положение колес показано на фиг. 5.
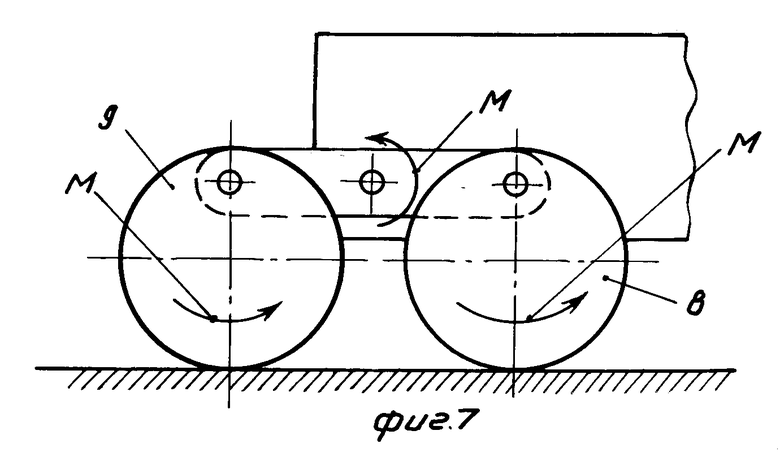
На фиг. 7 показано положение движителя 4 после полушага. Оно характеризуется тем, что колесо 9 стало впереди колеса 8 и в следующий момент колесо 8 из-за вращения коромысла 7 и колес 8 и 9 по стрелкам М оторвется от грунта 32 и начнет второй полушаг, двигаясь по дуге над колесом 9. Когда закончится второй полушаг (движитель сделает полный шаг), его колеса снова займут положение, показанное на фиг. 2 (колесо 8 будет спереди колеса 9). За это время ходовая часть пройдет путь, равный удвоенной величине длины окружности колеса плюс расстояние между центрами осей 10 и 11 (величина расстояния между точками Б и В на фиг. 2). При ровной поверхности грунта 32 при совершении полного шага величина клиренса будет оставаться постоянной.
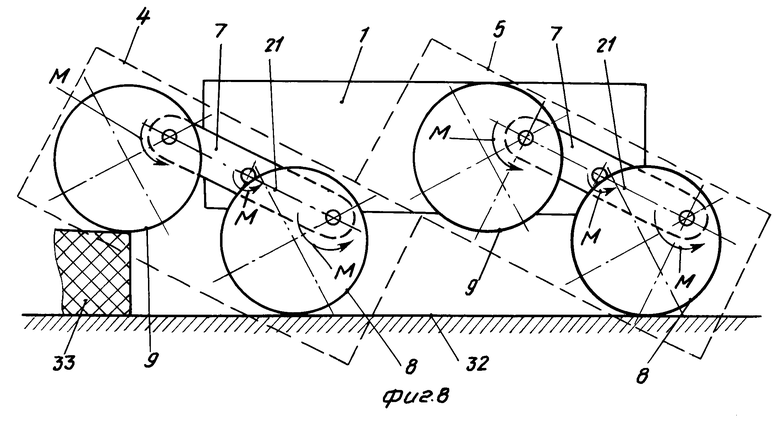
На фиг. 8 показано нашагивание движителя 4 при вращении коромысел 7 и колес 8 и 9 по стрелкам М на препятствие, размер высоты которого превышает размер радиуса колеса, но меньше размера клиренса. Движители 4 и 5 в рассматриваемом примере не имеют сдвига коромысел 7 этих движителей - они параллельны. Корпус 1 остается параллельным поверхности грунта 32 и величина клиренса будет неизменной.
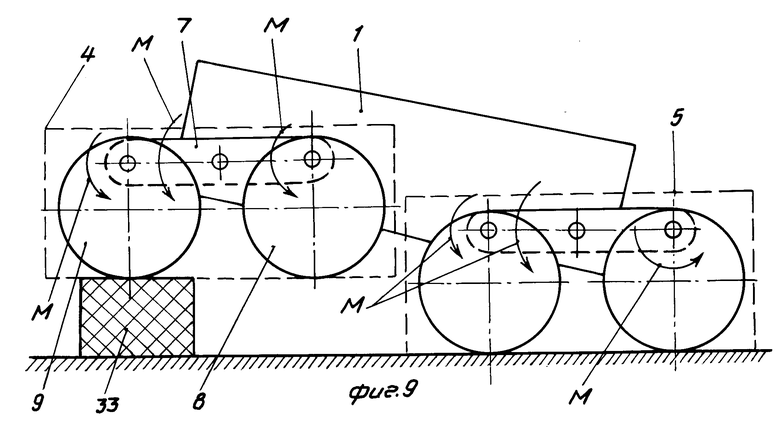
На фиг. 9 показано, что движитель 4 при дальнейшем вращении коромысла 7 и колес 8 и 9 по стрелкам М оторвался от грунта (колесо 8 отошло от грунта 32) и колесом 9 опирается на препятствие, а его коромысло 7 стало параллельно поверхности грунта 32, корпус 1 при этом перекосится, т.к. движитель 5 продолжает катиться по поверхности грунта 32.
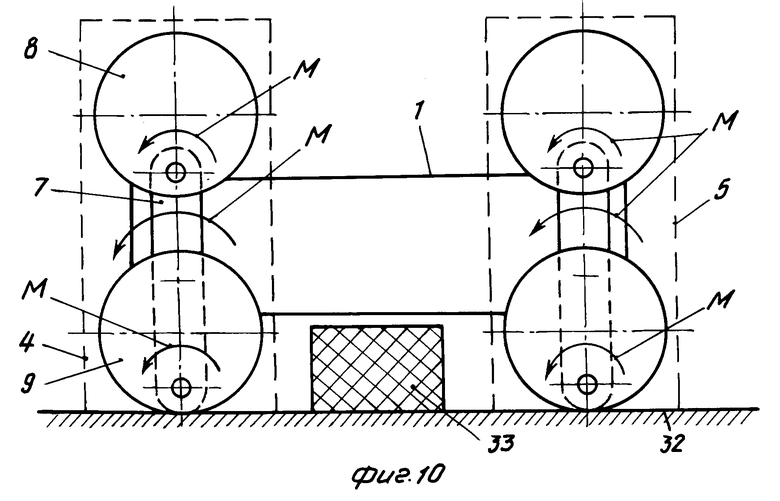
На фиг. 10 показано, что движитель 4 при дальнейшем вращении коромысла 7 и колес 8 и 9 по стрелкам М преодолел препятствие 33, а движитель 5 еще не доехал до препятствия. Корпус 1 снова параллелен поверхности грунта 32.
При дальнейшем вращении коромысел 7 и колес 8 и 9 по стрелкам М в движителях 4 и 5 движитель 5 преодолеет препятствие 33 аналогично тому, как это делал движитель 4, и вездеход примет положение, показанное на фиг. 2.
Предельный размер высоты препятствия, которое может преодолеть заявленное транспортное средство, больше размера диаметра колеса (в том случае, если препятствия расположены по сторонам дороги как раз под движителями).
| название | год | авторы | номер документа |
|---|---|---|---|
| Колесно-шагающий движитель транспортного средства | 1977 |
|
SU715376A1 |
| МНОГОФУНКЦИОНАЛЬНАЯ ПРЕОБРАЗУЕМАЯ ТРАНСПОРТНАЯ МАШИНА ДЛЯ ОБРАБОТКИ ПОЧВЫ | 1999 |
|
RU2218684C2 |
| ШАССИ ДЛЯ ПЕРЕДВИЖЕНИЯ ПО РАЗЛИЧНЫМ ОПОРНЫМ ПОВЕРХНОСТЯМ С КОЛЕСНО-ШАГОВЫМИ ДВИЖИТЕЛЯМИ | 2015 |
|
RU2628285C2 |
| КОЛЕСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ С ФУНКЦИЕЙ АКТИВНОЙ ПОДВЕСКИ | 2017 |
|
RU2671661C1 |
| Колесно-шагающий движитель | 1975 |
|
SU552232A1 |
| СОЧЛЕНЕННОЕ ТРАНСПОРТНОЕ СРЕДСТВО С КОЛЕСНО-ШАГАЮЩИМ ДВИЖИТЕЛЕМ | 2018 |
|
RU2684956C1 |
| Колесно-шагающий движитель | 1975 |
|
SU534386A1 |
| Колесно-шагающий движитель | 1980 |
|
SU908646A1 |
| КОЛЕСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ ПОВЫШЕННОЙ ОПОРНОЙ И ГЕОМЕТРИЧЕСКОЙ ПРОХОДИМОСТИ | 2019 |
|
RU2705869C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ВЫСОКОЙ ПРОХОДИМОСТИ | 2001 |
|
RU2176607C1 |
Использование: в транспортных средствах с колесно - шагающими движителями. Сущность изобретения: транспортное средство содержит корпус 1 и в каждом из движителей 2 - 5 ведущий вал 6, коромысло 7, кинематически связанное с ведущим валом 6, колеса 8 и 9, оси 10 и 11 которых установлены по краям 12 коромысла 7 с возможностью вращения в ту же сторону, что и коромысло, редуктор, выполненный планетарным с двумя сателлитами, установленными на соответствующих осях 10 и 11 колес 8 и 9. Водило выполнено сдвоенным в виде коромысла 7, солнечная шестерня соединена неподвижно с корпусом 1 и соединена с сателлитами цилиндрическими или коническими передатчиками или гибкими передачами, обеспечивающими одинаковые направления и значения скоростей вращения коромысла и сателлита. Колеса 8 и 9 установлены на эксцентрично расположенных осях 10 и 11 вращения с одинаковой величиной эксцентриситета, а в положении колес 8 и 9, когда их диаметры, проходящие через геометрические центры и центры осей вращения 10 и 11, совпадают с продольной осью коромысла 7, равновеликие плечи эксцентриситета направлены от осей вращения 10 и 11 колес 8 и 9 в одну сторону, величина наружного радиуса сателлита на оси 10 меньше расстояния между центром оси 10 вращения колеса и ближайшей точкой внешней окружности колеса 8. 3 з.п. ф-лы, 10 ил.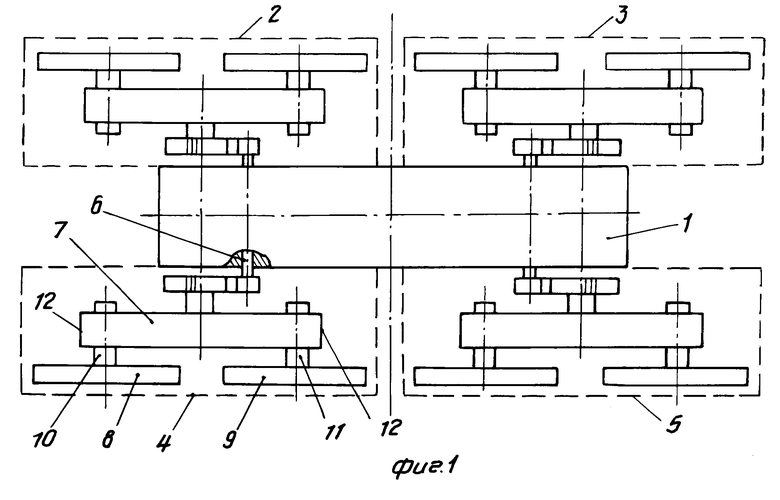
ТРАНСПОРТНОЕ СРЕДСТВО С КОЛЕСНО-ШАГАЮЩИМИ ДВИЖИТЕЛЯМИ М И ЛОВЧИКОВА.
| Самодвижущаяся игрушка "автоход | 1985 |
|
SU1377133A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
