Изобретение предназначено для применения в робототехнике, а также в тех отраслях деятельности человека, в которых с целью исключения присутствия человека в опасных для его здоровья или жизни средах, необходимо применение дистанционно управляемых многофункциональных робототехнических устройств.
Известен манипулятор МF-3, предназначенный для работы в дистанционно управляемом режиме. В комплект входят два электромеханических манипулятора, установленных на многозвенном гусеничном носителе, содержащем четыре независимых гусеничных блока, способных качаться относительно носителя в вертикальной плоскости. Конструкция носителя позволяет ему изменять свою геометрию, за счет чего обеспечиваются следующие преимущества перед мобильными роботами с обычными носителями:
устройство способно перемещаться по крутым лестницам, устойчиво и способно не опрокидываться даже на уклонах до 60о, имеет возможность поворота с очень малыми радиусами, кроме того, возможны реализация метода шагания и компенсация наклонов при боковых уклонах грунта.
Однако при всех преимуществах данная конструкция не может менять направление движения без поворота, а перемещается за счет создания силы трения скольжения между гусеницами и грунтом, что можно считать нерациональным для обеспечения хороших тяговых характеристик при движении носителя по скользким и рыхлым грунтам.
Известно устройство, представляющее собой носитель манипулятора и других систем и устройств, при этом ходовая часть носителя выполнена в виде шести (по три с каждой стороны) гусеничных движителя, причем средние движители неподвижны относительно носителя, а передние и задние имеют возможность качания в вертикальной плоскости. Такая конструкция носителя обеспечивает ему высокую проходимость, однако отсутствие поворота движителей в горизонтальной плоскости и наличие гусениц снижают маневренность устройства.
Известен мобильный робот АМР-2 с улучшенными характеристиками (прототип), совпадающий с предлагаемым устройством по технической сущности и максимальному количеству признаков. Мобильный робот АМР-2 содержит носитель, выполненный в виде корпуса, на котором установлены четыре движителя, способных вращаться относительно вертикальной оси в месте крепления движителя к корпусу носителя. Каждый движитель имеет качающийся в вертикальной плоскости рычаг, на котором последовательно установлено по два приводных колеса. Качающиеся рычаги с колесами позволяют носителю изменять свою геометрию и таким образом повысить проходимость робота в части преодоления лестниц, барьеров, траншей и т.п. Вращение же самих движителей относительно носителя обеспечивает роботу повышение маневренности за счет придания ему возможности начинать движение из любой точки по любому направлению без изменения ориентации носителя относительно внешней среды.
Конструкция носителя имеет следующие недостатки:
способность эффективного перемещения только методом качения; при реализации метода ходьбы в устройстве задействуются в синхронном режиме работы, обеспечивая при этом четыре опоры, все движители, при этом амплитуда вертикального циклоидного перемещения носителя равна расстоянию между осью качания рычага и наиболее удаленной точкой обода выступающего колеса; наличие на конце рычага круглого тела, которое не может выполнять функций зацепов, способных дать дополнительную возможность повышения проходимости и преодоления препятствий, типа уступ; невозможность обеспечения в одной конструкции равновысокой эффективности перемещения носителя как по рыхлому грунту, так и в случаях преодоления лестниц, так как в первом случае требуются колеса большого диаметра, а во втором случае необходимы колеса меньшего по отношению к размерам ступеней лестницы диаметра.
Целью изобретения является повышение проходимости носителя.
Это достигается тем, что в мобильный робот, содержащий корпус, на котором установлены несколько оснащенных приводами поворотных относительно собственных вертикальных осей движителей, причем в состав каждого движителя входит поворотный вокруг горизонтальной оси, на котором последовательно установлены два приводных колеса, между каждым движителем и корпусом введено устройство стабилизации пространственного положения корпуса относительно горизонтальной плоскости, а в состав каждого движителя введены две штанги, продольные оси которых расположены вдоль оси рычага, причем штанги расположены по разные стороны колес и каждая штанга шарнирно связана с каждым колесом в одной, расположенной на ободе колеса точки так, что каждая штанга образует параллелограммный механизм: штанга-спица одного колеса 1-рычаг-спица другого колеса и способна совершать плоскопараллельное движение, при этом по крайней мере один конец каждой штанги выступает за габариты колес.
Изложенная совокупность признаков обладает новизной, а введенные существенные признаки являются новыми и обеспечивают устройству повышение проходимости по сравнению с прототипом. Кроме того, достижению поставленной цели содействует то, что шарниры крепления одной штанги к колесам диаметрально противоположным шарнирам другой штанги на другой стороне колес, колеса одного движителя кинематически связаны, например, бесконечной цепью с передаточным отношением 1, оба колеса каждого движителя приводятся в синхронное вращение от одного двигателя, а ось качания рычага проходит через ось колеса, за габариты которого выступают штанги. Второе колесо имеет обод, диаметр которого меньше диаметра первого колеса, через которое проходит ось качания рычага, выступающие концы штанг снабжены крюкообразными зацепами, расположенными в плоскости, параллельной плоскости колес. Кроме того, устройство стабилизации пространственного положения корпуса относительно горизонтальной плоскости выполнено бесприводным и пассивным, например, в виде торсиона.
Предлагаемое устройство позволяет совместить в одной конструкции носителя мобильного робота такие методы движения, как качение и ходьба, что повышает проходимость мобильного робота. Кроме того, носитель за счет наличия зацепов приобретает новый метод перемещения в пространстве - метод цепляния-подтягивания, который позволяет практически без дополнительного усложнения конструкции повысить проходимость носителя на грунтах и поверхностях с твердыми высокими уступами.
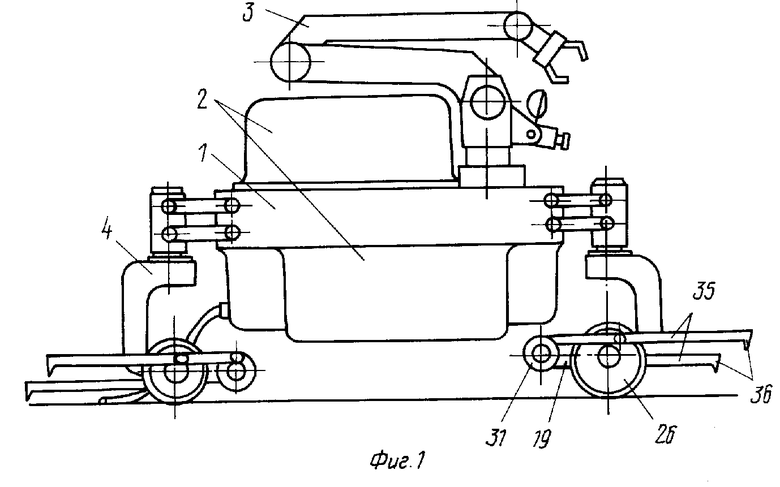
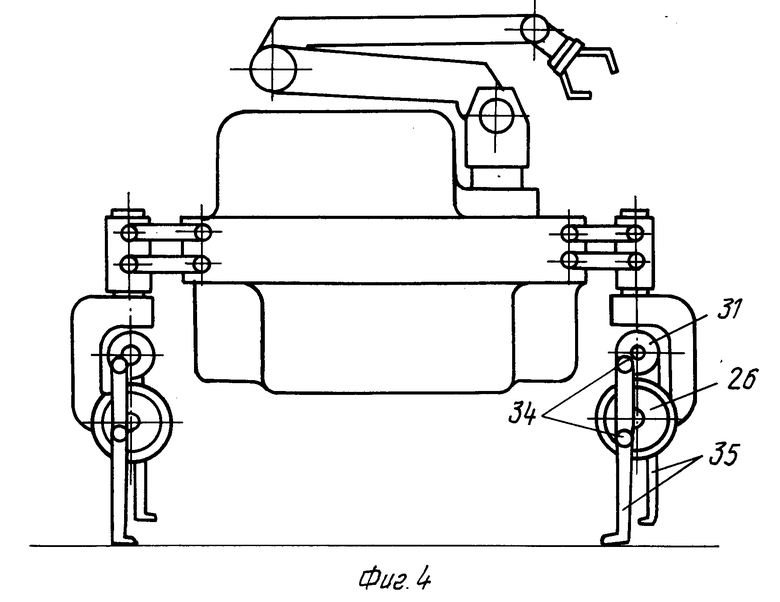
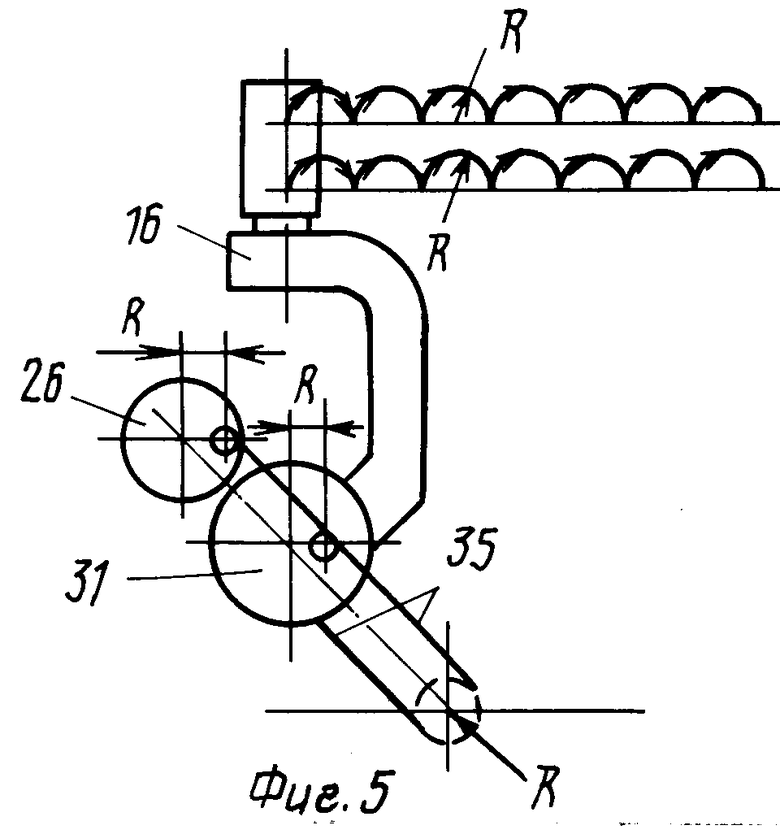
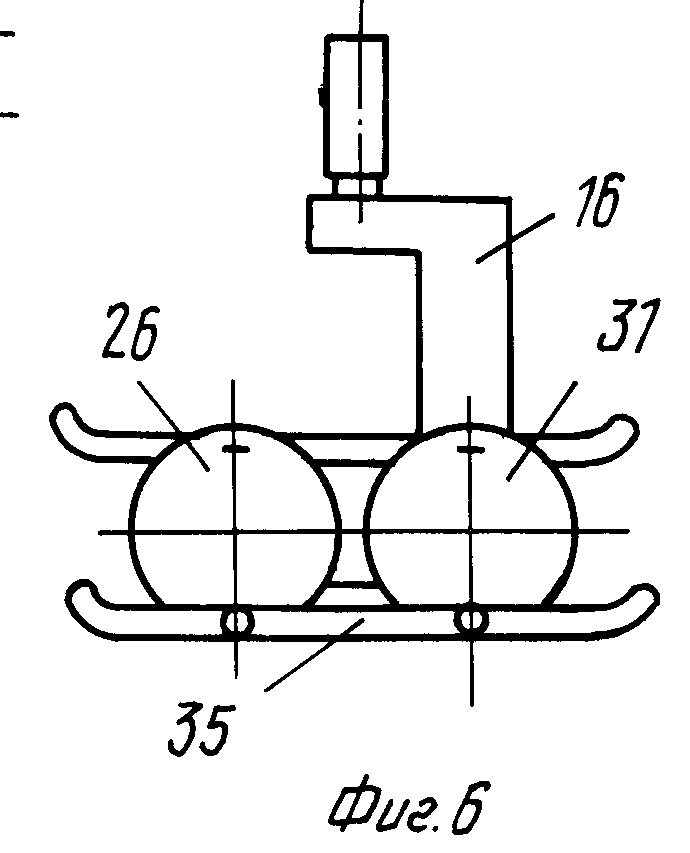
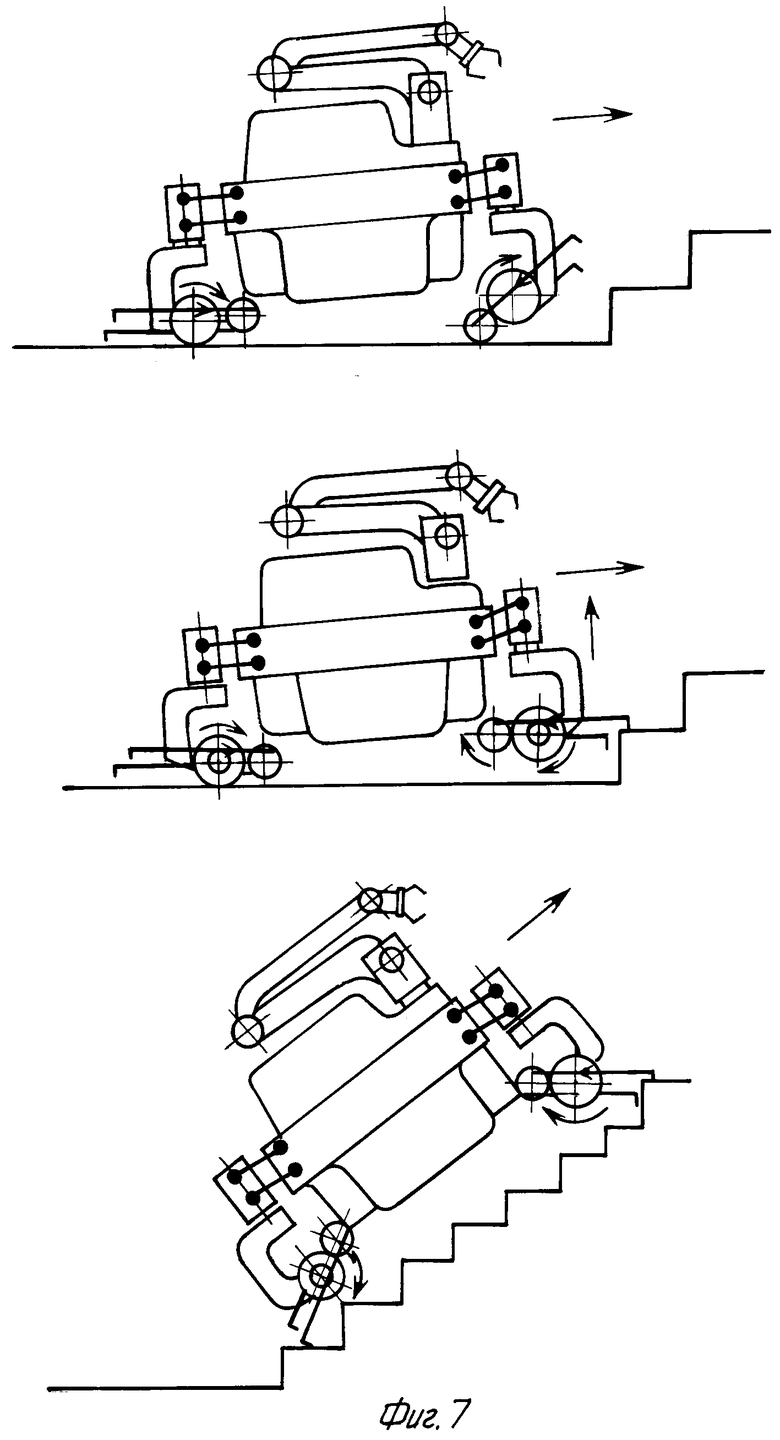
На фиг. 1 представлен мобильный робот в положении качения, вид сбоку; на фиг. 2 - мобильный робот в положении качения, вид спереди; на фиг. 3 - кинематическая схема движителя мобильного робота; на фиг. 4 - мобильный робот в положении ходьбы; на фиг. 5 - движитель робота и траектория перемещения точки крепления движителя к носителю; на фиг. 6 - вариант исполнения штанг движителя, мест их крепления и диаметров колес; на фиг. 7 - три фазы перемещения мобильного робота по лестнице.
Предлагаемое устройство состоит из корпуса 1, несущего контейнер 2 с аппаратурой, манипулятор 3 и четыре движителя 4, которые установлены в углах корпуса 1 при помощи параллелограммных механизмов. Каждый параллелограммный механизм состоит из опоры 5, установленной при помощи одноосных шарниров 6, качающихся рычагов 7 и одноосных шарниров 8 и 9 на корпусе 1, при этом опора 5 может совершать плоскопараллельное качание в плоскости рычагов 7 относительно корпуса 1. В шарнире 9 установлен торсион 10, один конец которого связан с рычагом 7, а другой - с корпусом 1 в опоре 11, при этом торсион 10 передает через шарнир 9 и рычаг 7 крутящий момент, величина которого выбрана с целью введения упругой подвески корпуса 1 при работе движителей 4 на этапах перемещения робота. В опоре 5 жестко установлено зубчатое колесо 12, зацепляющееся с шестерней 13, являющейся выходным звеном редуктора 14 и двигателя 15 привода поворота движителя 4 относительно вертикальной оси. Шестерня 13, редуктор 14 и двигатель 15 жестко установлены в стойке 16 движителя 4, крепление которого к опоре 5 выполнено посредством подшипникового узла, в котором установлена вертикальная ось 17, жестко связанная со стойкой 16. В нижней части стойки 16 установлена горизонтальная ось, на которой установлен качающийся рычаг 19. С рычагом 19 жестко связано зубчатое колесо 20, в зацеплении с которым находятся шестерня 21, редуктор 22 и двигатель 23 привода качания рычага 19. На оси 18, внутри рычага 19, зафиксированы звездочка 24 и коническое зубчатое колесо 25, а на концах оси 18 установлены колеса 26. С зубчатым колесом 25 в зацеплении находится коническая шестерня 27, являющаяся выходом редуктора 28 и двигателя 29 привода колес 26, который жестко связан с рычагом 19. Соединение рычага 19 со стойкой 16 осуществлено в местах прохождения через рычаг 19 оси 18, которое произведено при помощи подшипников. Через рычаг 18 параллельно оси 18 проходит ось 30, на концах которой установлены малые колеса 31, а внутри рычага 19 с осью жестко связана звездочка 32, через которую проходит бесконечная цепь 33, охватывающая также звездочку 24 оси 18. Геометрические характеристики звездочек 24 и 32 равны, тем самым передаточное отношение цепной передачи равно 1. Каждое из колес 26 и 31 имеет в своем диске аналогичные оси 34, установленные на одном и том же расстоянии Р от оси колес 26 и 31. На осях 34 колес 26 и 31, на каждой стороне рычага 19, установлена штанга 35. Так как расстояние между отверстиями штанги 35, в которые входят оси 34, равно расстоянию между осями колес 26 и 31, а расстояние от осей 34 до осей колес 26 и 31 одинаково, то в результате образуется параллелограммный механизм, в который входят штанга 35, колеса 26 и 31 и рычаг 19. При этом штанга 35 при вращении оси 18 и колес 26 и 31 совершает плоскопараллельное движение в вертикальной плоскости, причем каждая точка штанги 35 совершает вращательное движение по окружности с радиусом R. Один из концов штанги 35 выдвинут за габариты движителя 4 и заканчивается зацепом 36.
На фиг. 6 приведен вариант исполнения движителя 4, при котором колеса 26 и 31 выполнены в один диаметр, а штанга 35 выполнена и установлена так, что при нижнем положении осей 34 нижняя поверхность штанги 35 совпадает с наружной поверхностью ободов колес 26 и 31, т.е. в этом положении штанга 35 может выполнять функции лыжи или упора об опорную поверхность (грунт, пол) в промежутке между колесами 26 и 31.
Робот работает следующим образом.
Практически все приводы должны быть следящими, в худшем случае имеющими обратную связь только по скорости, а в лучшем - по скорости, положению и моменту.
При передвижении штанги 35 вместе с рычагом 19 (см. фиг. 1) повернуты приводом (21, 22, 23) качания рычага 19 в горизонтальное положение и движители 4 опираются на грунт (пол) ободами колес 26. Малые колеса 31 контакта с грунтом не имеют, как и зацепы 36 штанги 35. Таким образом, при изображенном на фиг. 1 положении механизмов перемещение происходит при помощи колес - качение, а торсион 10 через рычаги 7 удерживает своим моментом закрутки опору 5 в промежуточном положении качающихся рычагов 7, обеспечивая при этом пассивную стабилизацию (амортизацию) пространственного положения корпуса 1 относительно неровностей грунта.
Крутящий момент на колеса 26 передается от двигателя 29 через редуктор 28, шестерню 27, зубчатое колесо 25 и ось 18. Рычаг 19 удерживается в горизонтальном положении через передачу: двигатель 23 - редуктор 22 - шестерня 21 - зубчатое колесо 20. При этом через ось 30 вращает малые колеса 31, т. е. цепная передача обеспечивает синхронизацию вращения колес 26 и 31 с одинаковой угловой скоростью, а следовательно, и возможность плоскопараллельного движения (без заклинивания) штангам 35 и вращательного движения каждой точке штанги 35 и зацепам 36 по окружности с радиусом R.
Повороты мобильного робота могут производиться различными способами.
С п о с о б 1. Поворот производят по танковой схеме, когда колеса одного борта имеют скорость меньше (или больше) скорости колес другого борта. Иногда колеса одного борта могут быть заторможены или колеса бортов вращаются в разные стороны. При таком способе поворота корпус 1 меняет ориентацию в пространстве, а приводы 12 - 15 поворота стоек 16 могут не задействоваться.
С п о с о б 2. Поворот мобильного робота с разворотом движителей 4 в опорах 5 производят таким образом, что расположенные по диагонали корпуса 1 движители 4 принимают положение, при котором их штанги 35 становятся параллельными и касательными к окружности, проведенной через центр мобильного робота. В этом случае все движители 4 при вращении колес 26 начинают вращаться по окружности, а корпус 1 вращается относительно своего центра.
С п о с о б 3. Маневрирование производят без изменения ориентации корпуса 1. Все движители 4 расположены так, что их рычаги 19 параллельны. Например, если при положении робота (см. фиг. 1) все движители 4 повернуть в опорах 5 на угол 90о по часовой стрелке (смотреть сверху), то робот, не изменяя положения корпуса 1, начинает (при вращении колес 26) перемещаться на наблюдателя, смотрящего сбоку. Такой способ предусматривает задействование привода 15 и позволяет осуществлять маневрирование из одной точки по различным направлениям.
Изобретение позволяет повысить проходимость мобильному роботу за счет добавления определенным образом установленных штанг, выступающих за габариты движителей, придавая тем самым роботу возможность использовать в необходимых случаях метод ходьбы. Установка на концах штанг зацепов позволяет (автоматически) роботу использовать новый метод - цепляния за небольшие по размерам уступы и подтягивания к ним. При выполнении колес одинакового диаметра и установке штанг по касательной к ободам колес робот может использоваться для ходьбы по рыхлым и вязким грунтам, где необходимо низкое удельное давление на грунт, например, в болотистой местности. Предлагаемое сочетание механизмов и обеспечиваемые ими способы перемещения позволяют взять предлагаемую конструкцию носителя за основу для создания перемещающихся кресел для инвалидов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШАГАЮЩЕЕ УСТРОЙСТВО | 2016 |
|
RU2642020C2 |
| РОБОТИЗИРОВАННАЯ ТРАНСПОРТНАЯ ПЛАТФОРМА | 2012 |
|
RU2506157C1 |
| ДВИЖИТЕЛЬ | 2020 |
|
RU2750931C1 |
| СОЧЛЕНЕННОЕ ТРАНСПОРТНОЕ СРЕДСТВО С КОЛЕСНО-ШАГАЮЩИМ ДВИЖИТЕЛЕМ | 2018 |
|
RU2684956C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПРЕОДОЛЕНИЯ ПРЕПЯТСТВИЙ | 2015 |
|
RU2606915C2 |
| Модуль колёсно-гусеничного движителя и шасси с двумя модулями | 2022 |
|
RU2784225C1 |
| МНОГОФУНКЦИОНАЛЬНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2016 |
|
RU2641951C1 |
| УСТРОЙСТВО ДЛЯ ПОВЫШЕНИЯ ПРОХОДИМОСТИ КОЛЕСНОГО ТРАКТОРА | 2011 |
|
RU2484977C1 |
| ТЯГОВОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 1991 |
|
RU2011559C1 |
| АВТОПРИЦЕП - АМФИБИЙНЫЙ ПАРОМ | 2007 |
|
RU2339537C1 |


Использование: в робототехнике. Сущность изобретения: конструкция движителя мобильного робота может работать как в режиме колесного движителя, так и в режиме шагающего движителя. 4 з.п. ф-лы, 7 ил.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
