Изобретение относится к учебным тренажерам для обучения управлению транспортными средствами и может быть использовано для обучения и автоматизированного контроля первого этапа практического квалификационного экзамена на получение права на управление безрельсовыми транспортными средствами на учебно-тренировочном автодроме.
Известно устройство для обучения водителей (№ RU 2073383, опубл. 10.02.1997), содержащее расположенные на трассе движения транспортного средства элементы разметки и установленные на транспортном средстве датчик положения транспортного средства, схему сигнализации отклонения от трассы движения и счетчик ошибки, при этом датчик положения транспортного средства выполнен в виде заключенной в электростатический экран антенны приемоизлучателя, а элементы разметки выполнены в виде резонансных контуров, индуктивно связанных с антенной приемоизлучателя.
Недостатками известного устройства являются низкая точность контроля положения транспортного средства относительно элементов разметки и низкая помехоустойчивость датчика положения.
Известен способ обучения и контроля вождения безрельсовых транспортных средств на учебно-тренировочном автодроме (№ RU 2240600, опубл. 20.11.2004), выбранный в качестве прототипа, заключающийся в видеонаблюдении за трассой движения учебного транспортного средства, управляемого обучаемым, визуальном наблюдении за режимом работы учебного транспортного средства с наблюдательного пункта, поддержании связи с обучаемым через переговорное устройство, при этом качество вождения оценивают визуально по характеру светового сигнала устройства, смонтированного снаружи рабочего транспортного средства, выполненного с возможностью световой индикации режима работы учебного транспортного средства при выполнении упражнений.
Известна система для обучения и контроля вождения безрельсовых транспортных средств на учебно-тренировочном автодроме (№ RU 2240600, опубл. 20.11.2004), выбранная в качестве прототипа, содержащая трассу движения, учебное транспортное средство, пульт наблюдения, передатчик голосовых команд, систему датчиков состояния учебного транспортного средства, выполненных с возможностью индикации режима работы учебного транспортного средства с помощью сигнализатора, средство громкой связи, выполненные с возможностью подачи голосовых команд из пункта наблюдения к отдельному участку автодрома, средства видеонаблюдения и/или видеозаписи движущегося по трассе учебного транспортного средства.
Учебное транспортное средство, выполненное на базе реального транспортного средства, содержит внешнее световое сигнальное устройство, выполненное с возможностью подавать световые сигналы, отражающие режим работы транспортного средства и/или его ходовых агрегатов, и/или узлов, и/или органов управления транспортным средством, радиоприемник, позволяющий водителю получать голосовые команды инструктора с удаленного радиопередатчика, одну или несколько видеокамер, выполненных с возможностью отображения обстановки вокруг транспортного средства, датчик положение рычага переключения коробки передач, датчик состояния стояночного тормоза, датчик выключения двигателя, датчик величины отката транспортного средства, выполненный с возможностью подсчета оборотов одного из колес транспортного средства при откате.
Известные способ и устройство обладают низкой точностью результатов при групповом методе контроля в связи с необходимостью осуществления одновременного визуального контроля каждого транспортного средства на площадках учебно-тренировочного автодрома.
Задачей заявляемого изобретения является повышение точности одновременного контроля вождения нескольких транспортных средств.
Указанный технический результат достигается тем, что способ контроля вождения транспортных средств заключается в одновременном контроле за положением, траекторией движения и режимами работы нескольких транспортных средств при выполнении упражнений на площадках автодрома путем фиксирования пересечения габаритами транспортных средств ограничительных линий на площадках автодрома и режимов работы транспортных средств в блоках контроля транспортных средств, результаты выполнения упражнений передают из блока контроля каждого транспортного средства в центральную систему контроля, с помощью которой выставляют оценки вождения транспортных средств.
При контроле выполнения упражнения «Остановка и трогание на подъеме» фиксируют в блоке контроля пересечение всеми габаритами транспортного средства контрольной линии в начале подъема и не пересечение передними габаритами стоп-линии в конце подъема, включение рабочего или стояночного тормоза, остановку двигателя, затем измеряют базовое расстояние до заднего габарита транспортного средства после остановки и расстояние до начала движения вперед, определяют величину отката путем вычисления разности между базовым расстоянием и минимальным измеренным расстоянием при откате, сравнивают полученную величину с предельно допустимой величиной отката и передают результаты в центральную систему контроля.
При контроле выполнения упражнения «параллельная парковка задним ходом» фиксируют в блоке контроля пересечение всеми габаритами транспортного средства одной из ограничительных линий прямоугольной зоны стоянки и не пересечение габаритами остальных трех ограничительных линий.
Контролируют остановку транспортного средства по отсутствию ускорения транспортного средства и включению рабочего и(или) ручного тормоза, а включение нейтральной передачи путем фиксирования в блоке контроля включения сцепления и включения рабочего или стояночного тормоза.
Результаты выполнения упражнений обрабатывают в центральной системе контроля в автоматическом режиме, формируют промежуточные и итоговые оценки вождения каждого транспортного средства, передают управляющие команды в блоки контроля транспортных средств для воспроизведения голосовых сообщений кандидату в водители, отображают оценки экзаменатору, запоминают и печатают результаты экзамена в экзаменационном листе.
Указанный технический результат достигается также тем, что устройство контроля вождения транспортных средств состоит из учебно-тренировочного автодрома с несколькими площадками, центральной системы контроля, блока измерения отката транспортных средств, оборудованных блоками контроля с системой датчиков, системой радиосвязи с центральной системой контроля, при этом площадки автодрома снабжены магнитными ограничительными линиями, взаимодействующими с габаритными магнитными датчиками, установленными на транспортных средствах, центральная система контроля содержит блок управления и отображения информации с приемопередатчиком, блок контроля снабжен приемопередатчиком, выполненным с возможностью обмена данными с приемопередатчиком центральной системой контроля.
Блок измерения отката установлен на площадке автодрома и(или) на транспортном средстве и содержит ультразвуковой или оптический датчик для измерения величины отката, контроллер, приемопередатчик.
Устройство контроля вождения транспортных средств поясняется структурной схемой.
Устройство контроля вождения транспортных средств состоит из учебно-тренировочного автодрома 1 с несколькими площадками, транспортных средств (ТС) 2, центральной системы контроля (ЦСК) 3, блока измерения отката (БИО) 4, блока контроля (БК) 5, установленного на транспортном средстве 2.
Площадки автодрома снабжены магнитными ограничительными полосами (МОП) 6, установленными по периметру площадок автодрома, на линиях разметки, на контрольных линиях, на стоп-линиях, пересечение которых необходимо контролировать.
Площадка для упражнения «Остановка и трогание на подъеме» содержит контрольную линию, расположенную в начале подъема, и стоп-линию в конце подъема.
БИО 4 расположен на площадке для упражнения «Остановка и трогание на подъеме», также БИО 4 может быть расположен на заднем габарите ТС 2.
БИО 4 содержит ультразвуковой или оптический датчик измерения величины отката (ДО) 7, контроллер 8 и приемопередатчик (ПП) 9.
ЦСК 3 содержит приемопередатчик (ПП) 10, блок управления и отображения информации (БУОИ) 11, печатающее устройство (ПУ) 12.
Каждое транспортное средство 2 снабжено системой датчиков, акустической системой (АС) 13, приемопередатчиком (ПП) 14, соединенных с БК 5 транспортного средства 2.
Приемопередатчики 9, 10, 14 выполнены в виде радиомодемов.
Система датчиков содержит четыре магниторезистивных датчика или датчика Холла габаритов (МДГ) 15, установленных по углам ТС 2, датчик ускорения (ДУ) 16, датчик сцепления (ДС) 17, датчик рабочего тормоза (ДРТ) 18, датчик стояночного тормоза (ДСТ) 19, датчик остановки двигателя (ДОД) 20.
Способ контроля вождения транспортных средств реализуется следующим образом.
ЦСК 3 передает через ПП 10 и ПП 14 по радиоканалу в БК 5 команды для воспроизведения голосовых сообщений посредством АС 13 о начале экзамена, промежуточных оценках выполнения отдельных упражнений, итоговой оценки экзамена.
Транспортные средства 2, управляемые кандидатами в водители, поочередно проезжают площадки автодрома 1, выполняя упражнения.
При выполнении упражнения «Остановка и трогание на подъеме» ТС 2 пересекает контрольную линию, расположенную в начале подъема, двигается по наклонному участку и останавливается перед стоп-линией в конце подъема. При этом БК 5 фиксирует пересечение всеми МДГ 15 контрольной линии и не пересечение передними МДГ 15 стоп-линии, а также опрашивает датчики рабочего 18 и стояночного 19 тормоза, датчик остановки двигателя 20. Результаты контроля передают из БК 5 через ПП 14 в ЦСК 3.
После остановки ТС 2 на подъеме с помощью датчика измерения отката 7, установленного в начале подъема, определяют базовое расстояние до заднего габарита ТС 2, а после начала движения определяют величину отката путем вычисления в контроллере 8 разности между базовым расстоянием и минимальным измеренным расстоянием при откате ТС 2 и сравнивания полученной величины с предельно допустимой величиной отката. Результат сравнения передают через ПП 9 в ЦСК 3.
При выполнении упражнения «Параллельная парковка задним ходом» ТС 2 задним ходом въезжает в зону стоянки, ограниченную линиями разметки, пересекая по траектории движения контрольную линию, имеющую МОП с противоположной направленностью магнитного поля в отличии от МОП линий разметки. БК 5 фиксирует пересечение контрольной линии всеми МДГ 15 и не пересечение любым МДГ 15 линий разметки. После остановки в зоне стоянки БК 5 опрашивает датчик стояночного тормоза 19.
При выполнении упражнений постоянно контролируют остановку двигателя с помощью ДОД 20, установленного в замке зажигания.
Остановку ТС 2 определяют по отсутствию сигнала от датчика ускорения 16 и наличию сигнала от датчиков включения рабочего 18 или стояночного 19 тормоза.
Включение нейтральной передачи после остановки транспортного средства определяют по наличию сигналов от датчиков включения сцепления 17 и рабочего 18 или стояночного 19 тормоза.
ЦСК в автоматическом режиме обрабатывает полученные с БИО 4 и БК 5 результаты выполнения упражнений, формирует промежуточные и итоговые оценки вождения каждого транспортного средства, передает управляющие команды в блоки контроля 5 транспортных средств 2 для воспроизведения голосовых сообщений кандидату в водители, отображает оценки экзаменатору, запоминает и печатает результаты прохождения экзамена в экзаменационном листе.
Таким образом, осуществление одновременного контроля за вождением нескольких транспортных средств, фиксирование в блоках контроля транспортных средств режимов работы транспортных средств, пересечения габаритами транспортных средств ограничительных линий на площадках автодрома, передача результатов выполнения упражнений из блока контроля каждого транспортного средства в центральную систему контроля для автоматической оценки вождения транспортных средств позволило повысить точность контроля вождения нескольких транспортных средств при групповом методе контроля.
Изобретение относится к учебным тренажерам для обучения управлению транспортными средствами и направлено на повышение точности одновременного контроля вождения нескольких транспортных средств. Указанный технический результат достигается тем, что, согласно изобретению, предусмотрен одновременный контроль за положением, траекторией движения и режимами работы нескольких транспортных средств при выполнении упражнений на площадках автодрома путем фиксирования пересечения габаритами транспортных средств ограничительных линий на площадках автодрома и режимов работы транспортных средств в блоках контроля транспортных средств. Результаты выполнения упражнений передают из блока контроля каждого транспортного средства в центральную систему контроля, с помощью которой выставляют оценки вождения транспортных средств. Результаты выполнения упражнений обрабатывают в центральной системе контроля в автоматическом режиме, формируют промежуточные и итоговые оценки вождения каждого транспортного средства, сообщают оценки кандидату в водители путем воспроизведения записанных в блоке контроля голосовых сообщений, отображают оценки экзаменатору, запоминают и печатают результаты экзамена в экзаменационном листе. 2 н. и 10 з.п. ф-лы, 1 ил.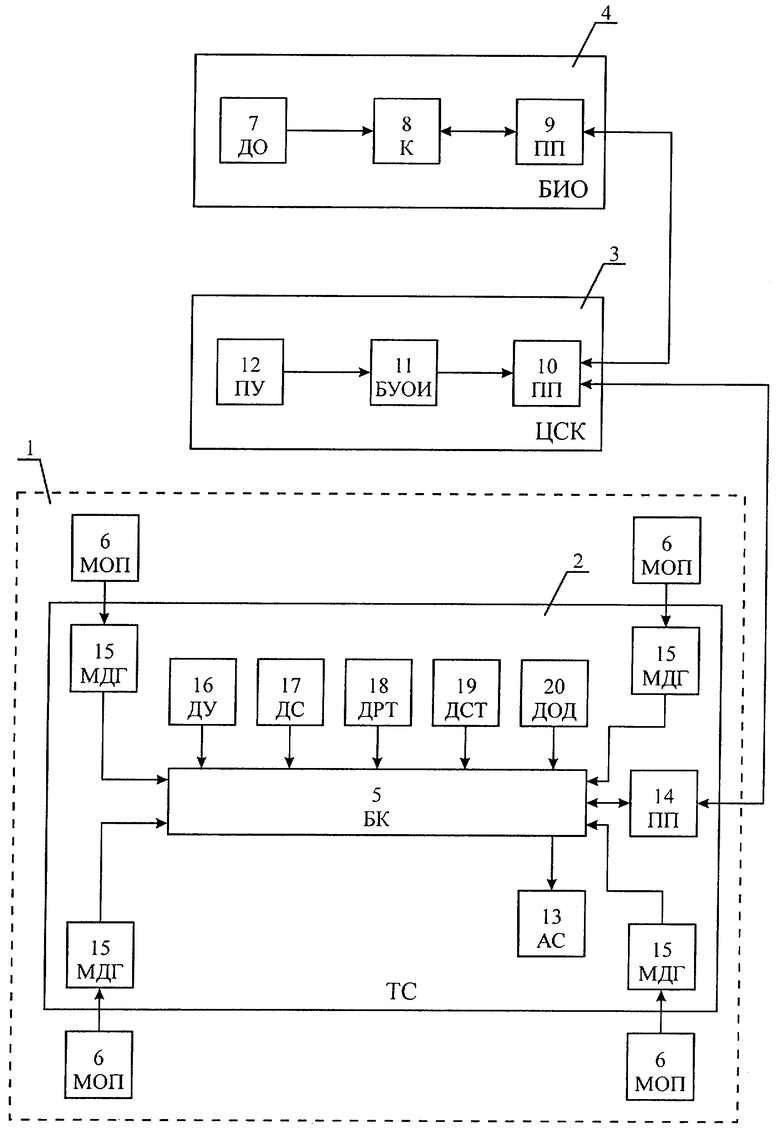
| СПОСОБ ОБУЧЕНИЯ И КОНТРОЛЯ ВОЖДЕНИЯ БЕЗРЕЛЬСОВЫХ ТРАНСПОРТНЫХ СРЕДСТВ НА УЧЕБНО-ТРЕНИРОВОЧНОМ АВТОДРОМЕ, УЧЕБНОЕ БЕЗРЕЛЬСОВОЕ ТРАНСПОРТНОЕ СРЕДСТВО И СИСТЕМА ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2003 |
|
RU2240600C1 |
| Устройство для контроля качества вождения безрельсовых транспортных средств на учебно-тренировочных автодромах | 1988 |
|
SU1661822A1 |
| Устройство для контроля качества вождения безрельсовых транспортных средств на учебно-тренировочных автодромах | 1984 |
|
SU1176365A1 |
| US 2002155415 А, 24.10.2002 | |||
| US 4358272 А, 09.11.1982 | |||
| Устройство для программного управления | 1982 |
|
SU1061106A1 |

