Изобретение относится к области транспортного машиностроения и предназначено для установки на автомобили с механической коробкой передач для осуществления процесса отжатия-отпускания педали сцепления автомобиля в автоматическом режиме (без физического контакта непосредственно водителя с педалью сцепления).
Известны приводы сцепления трансмиссии автомобиля (см., например, SU №563311, В60K 41/00, 1977 г.).
Наиболее близким техническим решением к заявленному является привод автоматического сцепления трансмиссии автомобиля, содержащий исполнительный электромеханический узел для регулирования передаваемого момента силы перемещением сцепления, блок управления исполнительным электромеханическим узлом, сигнальную связь указанного блока управления с механизмами привода автомобиля посредством датчика частоты вращения двигателя, датчика скорости автомобиля, датчика переключения коробки передач, датчика тормоза и датчика перемещения сцепления и средство логического формирования команд управления в функции параметров характеристических полей сигналов в сигнальной связи (RU №2202480, В60K 41/28, 1997 г.).
Недостатками данного технического решения является то, что исполнительный электромеханический узел для регулирования передаваемого момента силы перемещением сцепления жестко связан непосредственно с сцеплением автомобиля, что изменяет тем самым эксплуатационные характеристики сцепления автомобиля и лишает возможности водителя при необходимости лично использовать педаль сцепления для осуществления управления автомобилем. Кроме того, при выходе из строя какого либо элемента или оборудования устройства управления автоматическим сцеплением, например, датчика определения выключенной передачи и/или датчика определения намечаемого переключения, автомобиль эксплуатировать невозможно или можно эксплуатировать в таком случае только ограниченно.
Задачей, на решение которой направлено заявляемое изобретение, является создание эффективного и экономичного средства для управления автомобилем, в том числе и инвалидами.
Далее задачей изобретения является создание устройства автоматическим управлением сцепления автомобиля, без изменения технических характеристик собственно самого сцепления автомобиля и эксплуатационных характеристик автомобиля в целом.
Технический результат, который может быть получен при осуществлении изобретения, заключается в повышении надежности управления автомобилем в переходном режиме движения и работы двигателя и увеличение безопасности при его эксплуатации, в том числе возможности в любой момент вернуться к классическому способу управления автомобилем.
Указанный технический результат достигается приводом автоматического перемещения педали сцепления автомобиля, содержащим электромеханический привод для перемещения педали сцепления в положение отжато-отпущено, логический электронный блок управления, сигнальную связь указанного блока управления с механизмами привода автомобиля посредством датчика частоты вращения двигателя, датчика скорости автомобиля, датчика переключения коробки передач и датчика тормоза и указатель позиционного положения педали сцепления, за счет того, что электромеханический привод педали сцепления, являющийся исполнительным механизмом для осуществления перемещения педали сцепления в положение отжато-отпущено, выполнен в виде электродвигателя с червячной передачей, шкива и троса, при этом один конец троса закреплен на шкиве, а другой пропущен через ролик, установленный на полу салона под педалью сцепления и закреплен на педали сцепления автомобиля.
А также тем, что логический электронный блок управления, являющийся средством формирования команд управления, выполнен в виде узла управления электромеханическим приводом, узла "отключение сцепления", узла "включение сцепления", узла контроля работы двигателя автомобиля, узла анализа работы двигателя, узла анализа скорости движения автомобиля и узла синхронизации.
А также тем, что узел управления электромеханическим приводом педали сцепления выполнен в виде электронного устройства, имеющего настройку на включение электродвигателя электромеханического привода в направлении вращения для осуществления процесса перемещения педали для отключения сцепления и реверсивного включения электродвигателя для осуществления процесса возврата педали в исходное состояние для включения сцепления, при этом электродвигатель привода установлен с возможностью подключения к электрической цепи питания автомобиля для вращения в прямом или реверсивном направлении по мостовой электрической схеме, диагонали которой составляют комплектарные пары силовых транзисторов.
А также тем, что узел "отключение сцепления" выполнен в виде логического цифрового устройства, имеющего настройку на выработку сигнала для включения соответствующей пары силовых транзисторов (коммутирующих элементов) в цепи питания электродвигателя привода для включения его в сторону перемещения педали на отключения сцепления по наличию управляющих сигналов, поступающих от датчиков тормоза и коробки передач, обратной связи текущего положения педали сцепления и разрешающего сигнала из узла анализа скорости движения автомобиля на автоматическое отключение сцепления при скоростях движения автомобиля в диапазоне 0≤V<29 км/час.
А также тем, что узел "включение сцепления" выполнен в виде логического цифрового устройства, имеющего настройку на выработку управляющего сигнала для включения соответствующей пары силовых транзисторов в цепи питания электродвигателя привода для включения его в сторону перемещения педали сцепления в исходное состояние по наличию управляющих сигналов, поступающих из узла алгоритма "отключения сцепления", узла анализа работы двигателя и сигналов обратной связи текущего состояния педали сцепления.
А также тем, что узел анализа скорости движения автомобиля выполнен в виде логического цифрового устройства, алгоритм работы которого основан на выработке разрешающего сигнала в узел "отключение сцепления" для автоматического отключения сцепления при скоростях движения автомобиля в диапазоне 0≤V<29 км/час и выработке соответствующих управляющих сигналов в узел анализа работы двигателя при движения автомобиля на различных скоростях при наличии сигналов от датчика скорости автомобиля.
А также тем, что узел анализа работы двигателя выполнен в виде цифрового логического устройства со счетчиком импульсов, имеющим настройку на задержку выходного сигнала количеством тактовых импульсов синхронизации, заданных по величине, кратной времени половины оборота двигателя, алгоритм работы которого заключается в выработке управляющего сигнала для отпускания педали сцепления при достижении двигателем оборотов, достаточных для осуществления "старта" автомобиля по наличию соответствующих управляющих сигналов из узлов логического электронного блока.
А также тем, что узел контроля работы двигателя выполнен в виде логического цифрового устройства, алгоритм работы которого основан на выработке, при отсутствии сигналов от датчика двигателя (при неработающем двигателе), управляющего сигнала в узел "включение сцепления" для осуществления возврата педали сцепления в исходное состояние.
А также тем, что узел синхронизации работы функциональных узлов выполнен на базе двух мультивибраторов, включенных по кольцевой схеме и с времязадающей R-C цепочкой.
А также тем, что датчик перемещения сцепления выполнен в виде узла индикации с указателем позиционного состояния сцепления.
Сущность изобретения поясняется чертежами, где на фиг.1 показана функциональная схема привода автоматического перемещения педали сцепления автомобиля, на фиг.2 - кинематическая и электрическая схемы электромеханического привода педали сцепления, на фиг.3 - схема электрическая принципиальная узла управления электромеханическим приводом педали сцепления, на фиг.4 - схема электрическая принципиальная узла "отключение сцепления", на фиг.5 - схема электрическая принципиальная узла "включение сцепления", фиг.6 - схема электрическая принципиальная узла синхронизации, на фиг.7 - схема электрическая принципиальная узла контроля работы двигателя автомобиля, на фиг.8 - схема электрическая принципиальная узла анализа скорости движения автомобиля, на фиг.9 - схема электрическая принципиальная узла анализа работы двигателя, на фиг.10 - схема электрическая принципиальная узла индикации и указателя позиционного положения педали сцепления.
Привод автоматического перемещения педали сцепления автомобиля (фиг.1) содержит: электромеханический привод педали сцепления 1; логический электронный блок управления 2 для формирования команд управления исполнительным электромеханическим узлом 1 в функции параметров характеристических полей сигналов в сигнальной связи; датчик 3 переключения коробки передач; датчик 4 тормоза; датчик 5 скорости автомобиля; датчик 6 частоты вращения двигателя; указатель 7 позиционного положения педали сцепления.
В свою очередь логический электронный блок управления 2 содержит: узел управления электромеханическим приводом педали сцепления 8; узел "отключение сцепления" 9; узел "включение сцепления" 10; узел индикации позиционного положения педали сцепления 11; узел анализа скорости движения автомобиля 12; узел анализа работы двигателя 13; узел контроля работы двигателя 14; узел синхронизации 15.
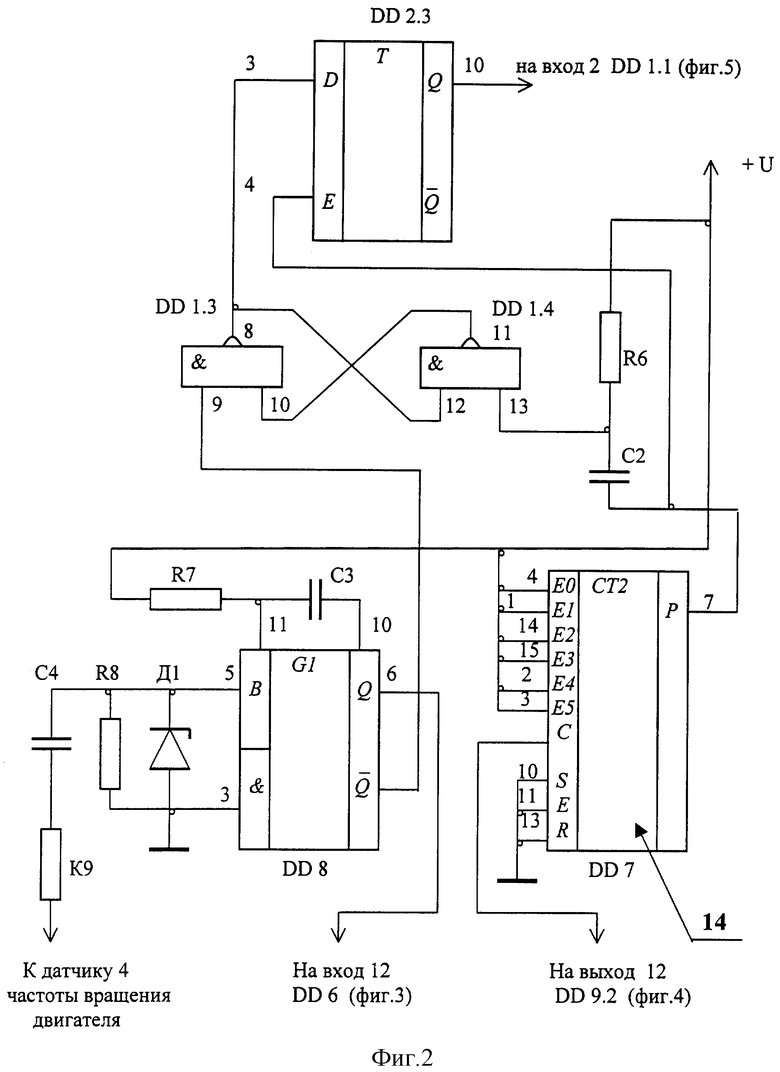
Электромеханический привод педали сцепления 1 (фиг.2), являющийся исполнительным механизмом для осуществления перемещения педали сцепления, выполнен в виде механического узла, имеющего электродвигатель 1.1, червячную передачу 1.2, шкив 1.3, трос 1.4, один конец которого закреплен на шкиве, а другой - на педали 1.6 сцепления автомобиля, ролик 1.5, закрепленный на полу салона под педалью сцепления, неподвижный конечный электрический выключатель К3, который отключает двигатель привода в точке исходного состояния педали сцепления, конечный электрический выключатель (К1), который отключает двигатель привода в конечной точке отжатой педали сцепления (его можно переместить в некоторых пределах с целью изменения величины диапазона перемещения рабочей части привода для совмещения его с диапазоном перемещения педали сцепления данного автомобиля), электрический выключатель К2 для промежуточной остановки педали сцепления (в режиме отпускания педали) в районе точки соприкосновения диска сцепления с маховиком двигателя (К2 можно перемещать в некоторых пределах в ту или противоположную сторону по ходу движения рабочей части привода с целью изменения расстояния от диска сцепления до маховика - в диапазоне некоторого контакта диска с маховиком для работы режиме скольжения или некоторого отрыва).
Узел 8 управлением электромеханическим приводом педали сцепления (фиг.3) представляет из себя электронное устройство, подсоединяющее электродвигатель электромеханического привода к электрической цепи питания автомобиля для вращения в прямом или реверсивном направлении, построенного по мостовой электрической схеме из силовых транзисторов Т1, Т2, Т4, Т5, в диагональ которой включен электродвигатель привода, управление диагональными парами силовых транзисторов мостовой схемы производится соответственно: Т1 и Т5 - транзистором Т3 при поступлении на его базу (при наличии разрешающего сигнала, сформированного делителем R2/R11, от конечного выключателя К1) управляющего сигнала из узла 9 на отключение сцепления; и Т2 и Т4 - транзистором Т6 при поступлении на его базу (при наличии разрешающих сигналов, сформированных делителем R3/R12 от промежуточного выключателя К2 и R4/R15 от конечного выключателя К3) управляющего сигнала из узла 10 на включение сцепления.
Узел 9 алгоритма "отключение сцепления" (фиг.4) является логическим цифровым устройством, алгоритм работы которого настроен на выработку, в соответствии с поступающими управляющими сигналами от датчиков 3 и 4, сигнала из узла 12 и сигнала обратной связи из узла 8, управляющих сигналов: на базу транзистора Т3 узла 8 для включения электродвигателя привода для перемещения педали сцепления на отключение сцепления и в узел 10 для блокировки выходного управляющего сигнала на включение сцепления.
Узел 10 алгоритма "включение сцепления" (фиг.5) является логическим цифровым устройством, алгоритм работы которого настроен на выработку, в соответствии с поступающими управляющими сигналами: из узлов 9, 13, 14 и сигналов обратной связи из узла 8, управляющих сигналов: на базу транзистора Т6 узла 8 для включения двигателя в реверсивном направлении для перемещения педали сцепления в исходное состояние и в узел 11.
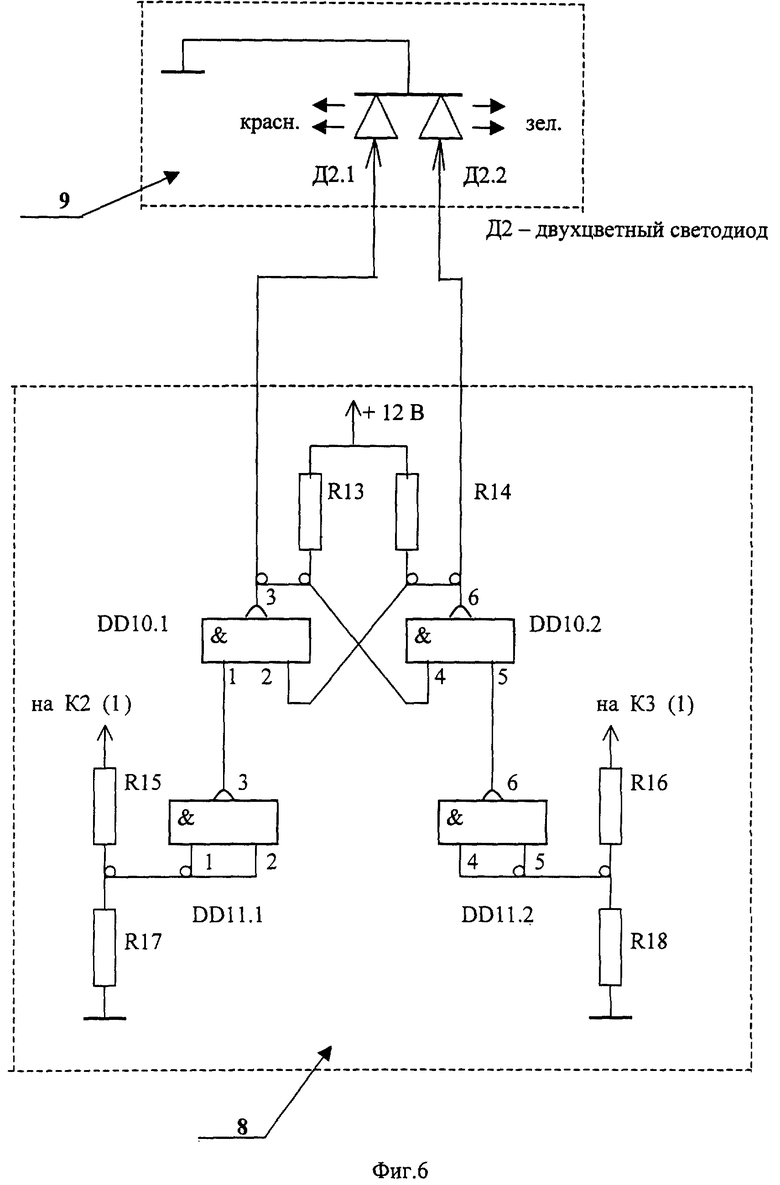
Узел 11 индикации (фиг.6, поз.11) предназначен для формирования, в соответствии с поступающими сигналами из узла 10, управляющих сигналов в указатель 9 для индикации позиционного состояния сцепления автомобиля - находится оно в отжатом состоянии, или в исходном.
Указатель 9 (фиг.6, поз.7) информирует водителя о текущем позиционном состоянии сцепления: в исходном состоянии свет светодиода зеленый, в отжатом состоянии - красный.
Узел анализа скорости движения автомобиля 12 (фиг.7) является логическим цифровым устройством, алгоритм работы которого предусматривает выработку, в соответствии с поступающими сигналами от датчика 5 и из узла 14, соответствующих управляющих сигналов: в узел 9 для блокировки управляющего сигнала от датчика тормоза 4 при скоростях движения автомобиля более 29 км/час и в узел 13 сигналов, соответствующих трем диапазонам скорости движения автомобиля - 0≤V<29 км/час, 29≤V<44 км/час, V≥44 км/час.
Узел анализа работы двигателя 13 (фиг.8) представляет собой логическое цифровое устройство со счетчиком импульсов 16, имеющим настройку на задержку выходного сигнала количеством тактовых импульсов синхронизации, заданным по величине, кратной времени половины оборота двигателя. Алгоритм работы этого устройства заключается в выработке для "старта" автомобиля на выходе 11 (DD19) счетчика 16 управляющего сигнала при его заполнении (время заполнения счетчика τ1=32T, где Т - период следования импульсов синхронизации) для включения сцепления, в момент, когда τ1≥t, где t - промежуток времени, равный 1/2 оборота двигателя.
Длительность τ1 устанавливается исходя из условия набора (в момент τ1≥t) двигателем оборотов, достаточных для осуществления "старта" автомобиля. Например, при Т=1 м/сек: при 800 об/мин t=37,5 м/сек, при 900 об/мин t=33,3 м/сек, а при 1000 об/мин t=30 м/сек, сцепление включится при ≈950 об/мин. Для получения других оборотов двигателя для осуществления "старта" автомобиля необходимо несколько изменить Т - период импульсов синхронизации узла 15.
Алгоритм работы этого устройства также заключается в выработке управляющего сигнала на выходе 6 элемента DD17.1 логического цифрового устройства 17 для включения сцепления на других оборотах двигателя при переключении передач на двигающемся автомобиле.
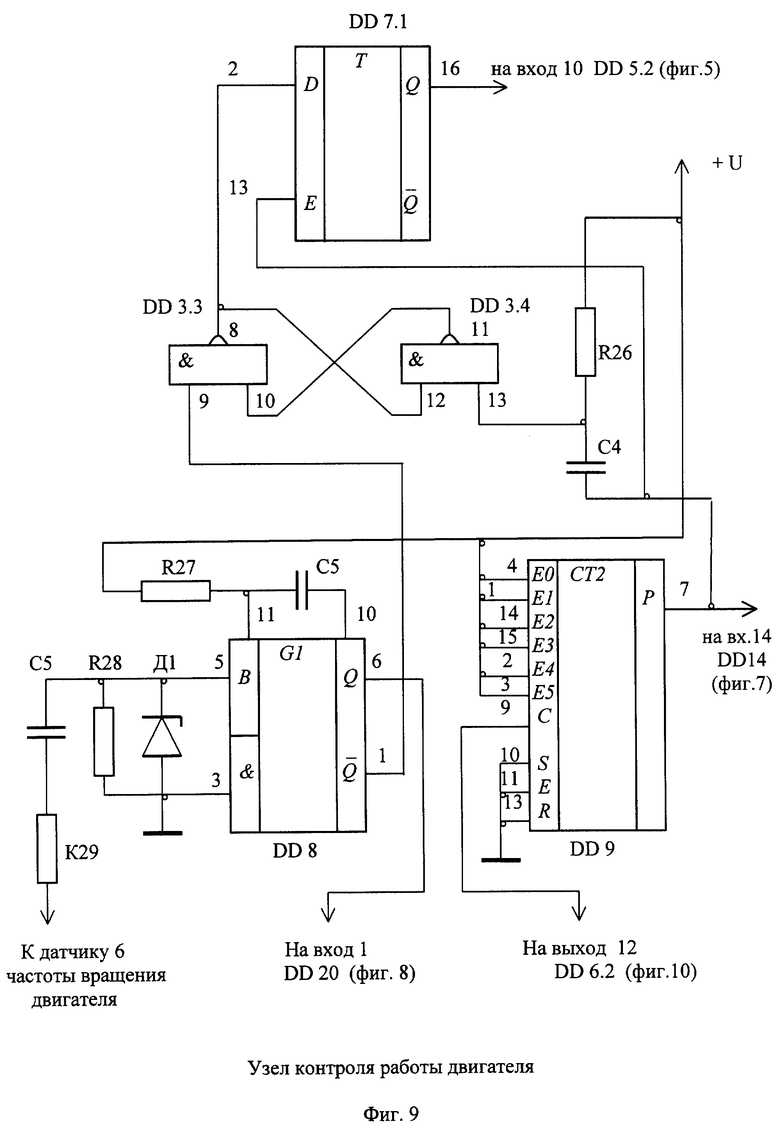
Узел контроля работы двигателя 14 (фиг.9) представляет собой логическое цифровое устройство, алгоритм работы которого основан на выработке, при отсутствии сигналов от датчика 6, частоты вращения двигателя управляющего сигнала в узел 10 для осуществления возврата педали сцепления в исходное состояние при неработающем двигателе автомобиля и формирования импульсов синхронизации с периодом Т=64 м/сек в узел 12.
Узел синхронизации 15 (фиг.10) представляет собой регулируемый генератор прямоугольных импульсов с частотой ≈1000 Гц с времязадающей R-C цепочкой, выполненный на базе двух мультивибраторов DD6.1 и DD6.2, включенных по кольцевой схеме, с возможностью изменения частоты вырабатываемых импульсов при помощи R23 в пределах ±10%, предназначенный для синхронизации работы функциональных узлов блока 2.
Устройство работает следующим образом.
В исходном состоянии при стоящем автомобиле и работающем на х.х. двигателе, на вход 5 ждущего мультивибратора DD8 узла контроля работы двигателя 14 с датчика 6 поступают импульсы положительной полярности (два импульса за 1 оборот двигателя). Сформированные мультивибратором DD8 сигналы "0" длительностью ≈4 м/сек с выхода 1 переводят Т-триггер, построенный на элементах DD3.3-DD4.4, в состояние с сигналом "1" на его выходе 8, который поступает на вход 2 D-триггера элемента DD7.1, выполняющего роль защелки данных по входу 2 и при очередном сигнале "1" поступившем на вход 13, поступает на выход 16.
Разрешающий сигнал "1" для входа 13 формируется счетчиком импульсов DD9, на вход 9 которого поступают импульсы синхронизации из узла синхронизации 15. По окончании сигнала "1", на выходе 7 DD9 появляется сигнал "0", который блокирует вход 2 D-триггера и на выходе 16 которого фиксируется ранее присутствующий на входе 2 сигнал (при работающем двигателе - это сигнал "1").
Одновременно сигнал "0" с выхода 7 DD9 поступает на вход 13 Т-триггера и устанавливает его при помощи элементов С4 и R26 в исходное состояние, на выходе 8 которого устанавливается сигнал "0". В свою очередь, при работающем двигателе автомобиля, каждый сигнал "0" с выхода 1 DD8 переводит Т-триггер в состояние, с сигналом "1" на его выходе 8, который при очередном разрешающем сигнале "1", поступившем на вход D-триггера, фиксируется на его выходе 16, обеспечивая тем самым постоянное присутствие сигнала "1" на выходе 16, который поступает на вход 10 элемента DD5.2 узла алгоритма "включение сцепления" 10, обеспечивая работу соответствующей программы этого узла.
Одновременно сигналы с выхода 7 счетчика импульсов DD9, используемого в данном случае как делитель частоты на 64, поступают на вход 14 счетчика импульсов DD14 узла анализа скорости движения автомобиля 12.
Одновременно с выхода 6 ждущего мультивибратора DD8 импульсы оборотов двигателя поступают на вход 12 JK-триггера DD21 узла анализа оборотов двигателя 13, работающего в режиме переключения, с выхода 8 которого импульсы с периодом Т=2 t (один оборот двигателя) поступают на входы сброса (2 и 3) счетчика 16, к выходам 9, 8 и 11 элемента DD19 счетчика 16 подключена логическая схема 17, при помощи которой (в зависимости от скорости движения автомобиля) изменяется коэффициент счета счетчика 16:К1=32, К2=24, К3=16 (возможны другие варианты), и на выходе 6 элемента DD17.1 которой формируется управляющий импульс.
При появлении на выходе 8 DD21 сигнала "0", Т-триггер логической схемы 17, построенной на элементах DD17.1 и DD18.1, устанавливается в исходное состояние с сигналом "0" на выходе 6, который поступает на вход 2 D-триггера, выполняющего роль защелки данных по этому входу. Одновременно счетчик импульсов 16 на время t, которое равно промежутку времени между поступающими от датчика двигателя импульсами (половина оборота двигателя), переводится в режим счета импульсов синхронизации, поступающих на вход 1 из узла синхронизации 15. Наибольшего значения t (время заполнения счетчика 16) достигает при работе двигателя на холостом ходу, например: при x.x двигателя 750 об/мин - t=40 м/сек. За этот промежуток времени на счетчик 16 поступит около 40 импульсов (Тсинхр.≈1 м/сек), а на его выходе 11 на 32 входном импульсе появляется сигнал "1", который поступает на вход 4 элемента DD18.2 логической схемы 17.
При стоящем автомобиле или при его движении на скорости менее 14 км/час на входы 13 и 10 логической схемы 17 из узла анализа скорости движения автомобиля 12 поступают сигналы "0", которые блокируют соответственно элементы DD17.2 и DD18,3 по другим входам, на вход 5 DD18.2 поступает сигнала "1", поэтому на выходе 6 появляется сигнал "0", который поступает на вход 1 Т-триггера, на выходе 6 которого появляется сигнал "1", который поступает на вход 2 D-триггера.
По истечении времени t (поступлении очередного импульса от датчика оборот двигателя) на выходе 8 JK-триггера DD21 появляется сигнала "1", который при помощи элементов С11 и R34 в виде короткого импульса поступает на вход 13 D-триггера, в результате чего присутствующий на его входе 2 сигнала "1" фиксируется на выходе 16, а на выходе 1 - сигнал "0".
Одновременно сигнал "1" с выхода 8 JK-триггера DD21 поступает на входы 2 и 3 счетчика 16, устанавливает его в исходное состояние и удерживает счетчик 16 в этом состоянии до прихода очередного импульса от датчика оборотов двигателя, в результате чего JK-триггер DD21 меняет свое состояние на противоположное с сигналом "0" на выходе 8 и весь цикл работы узла повторяется в соответствии с описанием данного пункта.
Сигналы с выхода 1 D-триггера DD16 поступают на вход 13 DD4.4 узла алгоритма "включение сцепления".
При нажатии на тормоз на вход 12 элемента DD2.4 от датчика тормоза 4 поступает сигнал "1", одновременно, при стоящем автомобиле или при его движении на скорости менее 14 км/час, на вход 13 DD2.4 с выхода 1 D-триггера DD 11.1a из узла анализа скорости движения автомобиля 12 поступает сигнала "1", поэтому на выходе 11 появляется сигнал "0", который поступает на вход 10 DD2.3, на втором входе 9 которого присутствует сигнала "1".
На выходе 8 DD2.3 появляется сигнала "1", который поступает на вход 4 элемента DD2.2 и на оба входа инвертора DD2.1, в результате чего сигнал "0" с выхода 3 при помощи элементов С1 и R19 устанавливает Т-триггер, построенный на элементах DD1.3 и DD1.4 в противоположное от исходного состояние, в результате чего на вход 5 элемента DD2.2 поступает сигнал "1", на его выходе 6 появляется сигнал "0", который поступает на оба входа инвертора DD1.1, на выходе которого появляется сигнала "1", который поступает на базу транзистора Т3 узла управления электромеханическим приводом педали сцепления 8. Транзистор Т3 открывается и, в свою очередь, открывает диагональную пару силовых транзисторов Т1 и Т5, которые замыкают цепь питания электродвигателя привода в полярности для вращения в направлении наматывания на шкив привода троса, который проходит через ролик, закрепленный на полу салона под педалью сцепления, второй конец троса соединен с педалью сцепления, в результате чего педаль притягивается к полу.
Одновременно с выхода 6 элемента DD2.2 сигнал "0" поступает на вход 1 элемента DD3.1 и через инвертор DD3.2 поступает на вход 4 DD5.1 узла алгоритма "включение сцепления" 10, блокируя транзистор Т6 и, соответственно, диагональную пару транзисторов Т2 и Т4 от случайного включения на момент процесса отключения сцепления.
В момент непосредственного механического отсоединения диска механизма сцепления от маховика двигателя срабатывает промежуточный электрический выключатель К2 привода и замыкает цепь делителя напряжения R3/R12, от которого сигнал "1" поступает на инвертор DD4.1 узла 10, с выхода 3 DD4.1 сигнал "0" поступает на вход 9 элемента DD5.2, на выходе 8 которого устанавливается сигнал "1", который поступает на вход 5 DD5.1.
Одновременно сигнал "0" с выхода 3 DD4.1 поступает на вход 1 DD22.1 Т-триггера узла индикации 11, который включает красный и выключает зеленый светодиод указателя 7, информируя водителя о том, что сцепление отключено.
При дальнейшем движении педали сцепления, в крайнем положении, срабатывает конечный выключатель К1, который отключает соответствующую диагональную цепь питания электродвигателя и включает цепь делителя напряжения R2/R11, сигнала "1" от которого поступает на вход инвертора DD1.2 узла 9, сигнал "0" с выхода инвертора поступает на вход 13 Т-триггера и устанавливает его в исходное состояние с сигналом "0" на выходе 8, который поступает на вход 5 элемента DD2.2 и блокирует прохождение управляющего сигнала по входу 4, в результате чего транзисторы Т3, Т1 и Т5 закрываются.
В этот момент водитель может включить первую передачу.
Сигнала "1" с выхода 6 DD2.2 через элементы DD3.1 и DD3.2 поступает на вход 4 элемента DD5.1 узла 10.
На входе 3 DD5.1 в этот момент присутствует сигнал "1" поступающий с выхода 6 инвертора DD4.2, подключенного по входу к делителю напряжения R4/R15, цепь которого в данном состоянии сцепления отключена конечным выключателем К3, на входе 5 присутствует сигнал "1" формирование которого описано в абзаце 1 пункта 4. На выходе 6 DD5.1 появляется сигнал "0", на инверторе DD4.3 - сигнал "1", который поступает на базу транзистора Т6 и открывает его, Т6 приводит в открытое состояние диагональную пару силовых транзисторов Т2 и Т4, которые включают электродвигатель в реверсивном направлении, вращая шкив в направлении сматывания троса, педаль сцепления начинает опускаться.
В районе точки соприкосновения диска сцепления с маховиком двигателя срабатывает промежуточный выключатель К2 и разрывает цепь делителя R3/R12, в результате чего на вход 9 DD5.2 поступает сигнала "1". В этот момент на входе 10 присутствует сигнал "1", сформированный в соответствии с описанием абзаца 2 пункта 1, а на входе 11 - сигнал "1", поступающий с выхода 11 элемента DD4.4, на вход 13 которого поступает сигнал "0" в соответствии с описанием абзаца 3 пункта 2, в результате чего на выходе 8 DD 5.2 появляется сигнал "0", на выходе 6 элемента DD5.1 - сигнала "1", на выходе 8 инвертора DD4.3 - сигнал "0", который переводит транзисторы Т6, Т2 и Т4 в закрытое состояние, в результате чего электродвигатель привода останавливается и педаль сцепления остается в промежуточном состоянии в районе точки соприкосновения диска сцепления с маховиком двигателя.
Несколько сдвигая при помощи винтового механизма промежуточный выключатель по ходу движения педали сцепления (по ходу движения троса), можно регулировать промежуток между диском сцепления и маховиком двигателя: от некоторого отрыва до некоторого пробуксовывания диска по маховику.
Водитель нажимает на педаль газа и двигатель начинает увеличивать обороты, промежуток времени t между поступающими от датчика 6 импульсами начинает уменьшаться. При 900 об/мин - t=33,3 м/сек. Если для данного автомобиля такая величина оборотов двигателя достаточна для осуществления "старта" автомобиля, то время заполнения τ1 счетчика 16 узла 10 должно быть = 33,3 м/сек (что соответствует периоду импульсов синхронизации Т=1,04 м/сек, который выставляется сопротивлением R23 узла 15). В момент, когда обороты двигателя чуть превысят 900 об/мин, будет выполняться условие τ1<t и счетчик 16 не будет успевать полностью заполниться, на выходе 11 DD19 будет постоянно присутствовать сигнал "0", а на выходе 6 DD18.2 - сигнал "1".
Этот сигнал не изменяет исходное состояние Т-триггера и на вход 2 D-триггера поступит сигнал "0", который, в соответствии с описанием абзаца 3 пункта 2, зафиксируется на его выходе 16, а на выходе 1 появится сигнал "1", который поступает на вход 13 элемента DD 4.4 узла 10, на выходе 11 которого появится сигнал "0", а на выходе 8 элемента DD5.2 сигнал "1", который поступает на вход 5 элемента DD5.1, на входах 3 и 4 которого, в соответствии с описанием выше, присутствуют сигналы "1", на выходе 6 появится сигнал "0", который при помощи инвертора DD4.3 откроет транзистор Т6 и, соответственно, Т2 и Т4, которые включат электродвигатель для дальнейшего опускания педали сцепления в исходное состояние.
После жесткого сцепления диска с маховиком автомобиль начинает движение.
При достижении педали сцепления исходного состояния срабатывает конечный выключатель К3 который отключает соответствующую диагональную цепь питания электродвигателя и включает цепь делителя напряжения R4/R15, сигнал "1" от которого поступает на вход инвертора DD4.2 узла 10, сигнал "0" с выхода инвертора поступает на вход 3 элемента DD5.1 и блокирует прохождение управляющего сигнала по входу 5, в результате чего транзисторы Т6, Т2 и Т4 закрываются.
Одновременно сигнал "0" с выхода 6 DD4.2 поступает на вход 5 DD22.2 Т-триггера узла индикации 11, который включает зеленый и выключает красный светодиод указателя 7, информируя водителя о том, что сцепление включено.
С момента начала движения автомобиля на вход 5 ждущего мультивибратора DD15 узла анализа скорости движения автомобиля начинают поступать импульсы от датчика скорости 5. При прохождении 1 метра пути от датчика 5 в схему поступает 4 импульса. Сформированные мультивибратором импульсы поступают на вход 14 счетчика импульсов DD13, алгоритм работы которого определяется управляющими сигналами по входам 6 и 7, поступающими с выхода 9 счетчика импульсов синхронизации DD14, на вход 14 которого поступают из узла 14 (см абзац 4 пункта 1) импульсы с периодом 64 м/сек. На выходе 9 образуется меандр симметричных импульсов с периодом Т=2t1, где t1=128 м/сек.
При появлении на выходе 9 DD14 сигнала "0" Т-триггеры DD12.1/DD12.2 и DD12.3/DD12.4 при помощи элементов С7 и R31 устанавливаются в исходное состояние с сигналами "0" на выходах 6 и 8 соответственно, которые поступают на входы 2 и 3 D-триггеров DD11.1 а и DD11.1b. Одновременно сигнал "0" на входах 6 и 7 счетчика DD13 переводит его в режим счета импульсов от датчика скорости и, если за этот промежуток времени (t1) на вход счетчика поступит менее 4 импульсов (скорость автомобиля менее 8 м/сек или 29 км/час), то на его выходах 9 и 8 сохраняются сигналы "0", которые не изменяют исходное состояния Т-триггеров DD12.1/DD12.2 и DD12.3/DD12.4. При появлении на выходе 9 DD14 сигнала "1" на вход 13 D-триггеров поступает короткий сигнал "1", сформированный элементами С6 и R30, который фиксирует присутствующие на входах 2 и 3 сигналы "0" на выходах 13 и 15 этих элементах соответственно и противоположные им по знаку сигналы "1" на выходах 1 и 14 соответственно.
Сигнал "1" с выхода 1 DD11.1а используется в соответствии с описанием абзаца 3 пункта 2 и абзаца 1 пункта 3.
Если за время t1 на вход счетчика DD13 поступит от 4 до 5 импульсов, то на его выходе 9 появится сигнал "1", на выходе 8 останется сигнал "0" (скорость автомобиля находится в пределах 29≤V<44 км/час), которые зафиксируются соответственно на выходах 13 и 15 D-триггеров. На выходе 1 появится сигнал "0", на выходе 3 DD10.1 появится сигнал "1".
Если за время t1 на вход счетчика DD13 поступит от 6 и более импульсов, то на его выходе 9 появится сигнал "0", однако ранее присутствующий сигнал "1" при помощи инвертора DD10.3 изменит состояние Т-триггера DD12.1/ DD12.2 на противоположное с сигналом "1" на выходе 6, на выходе 8 DD13 появится сигнал "1" (скорость автомобиля V>44 км/час), который при помощи инвертора DD10.4 изменит состояние T-тригтера DD12.3/ DD12.4 на противоположное с сигналом "1" на выходе 8. Выходные сигналы Т-триггеров зафиксируются соответственно на выходах 13 и 15 D-триггеров. На выходе 15 появится сигнал "1", на выходе 1 и 3 DD10.1 появятся сигналы "0".
При езде в "пробках" при каждом нажатии на тормоз для непосредственного торможения автомобиля и нажатии на педаль газа для осуществления "старта" алгоритм работы логического электронного блока управления 2 повторяется в соответствии с описанием пунктов 3, 4, 5 и 6.
После "старта" и достижении автомобилем некоторой скорости водитель берется за рычаг переключения передач, в результате чего срабатывает сенсорный датчик 3 коробки передач, сигнал "0" с которого поступает на вход 9 элемента DD2.3, на втором входе 10 которого присутствует сигнал "1". Одновременно сигнал "0" поступает на вход 2 элемента DD3.1 и на момент переключения передачи блокирует работу узла 10.
Далее алгоритм работы логического электронного блока управления 2 соответствует описанию абзацев 2 и 3 пункта 3, пункта 4 и абзаца 1 пункта 5.
Водитель включает соответствующую передачу и отпускает рычаг коробки передач. На вход 2 элемента DD3.1 от датчика 3 поступит сигнал "1", на вход 1 сигнал "1" поступает с выхода 6 элемента DD2.2, появившийся на выходе 6 элемента DD3.2 сигнал "1" деблокирует узел 10.
Далее алгоритм работы логического электронного блока управления 2 соответствует описанию абзацев 4 и 5 пункта 5.
Если скорость движения автомобиля в момент переключения передачи находится в интервале 29 км/час ≤ V<43 км/час, то на входы 5 и 10 логической схемы 17 из узла 12 (см. абзац 4 пункта 7) поступают сигналы "0", которые блокируют соответственно элементы DD18.2 и DD18.3 по другим входам, на вход 13 элемента DD17.2 поступает сигнал "1", в результате чего коэффициент счетчика 16 станет равным 24: на выходе 8 элемента DD17.2 на 24 тактовом импульсе будет появляться сигнал "0", т.е. время заполнения счетчика τ2=1,04 м/сек × 24=25 м/сек, что соответствует режиму работы двигателя с 1200 об/мин. В момент, когда обороты двигателя чуть превысят 1200 об/мин, будет выполняться условие t<τ2 и счетчик 16 не будет успевать полностью заполняться, на выходе 8 элемента DD17.2 будет постоянно присутствовать сигнал "1", далее алгоритм работы привода соответствует описанию абзацев 2, 4 и 5 пункта 6.
Если скорость движения автомобиля в момент переключения передачи V>44 км/час, то на входы 5 и 13 логической схемы 17 из узла 12 (см. абзац 5 пункта 7) поступают сигналы "0", которые блокируют соответственно элементы DD18.2 и DD17.2 по другим входам, на вход 10 элемента DD18.3 поступает сигнал "1", в результате чего коэффициент счетчика 16 станет равным 16: на выходе 8 элемента DD17.2 на 16 тактовом импульсе будет появляться сигнал "0", т.е. время заполнения счетчика τ3=1,04 м/сек × 16=16,6 м/сек, что соответствует режиму работы двигателя с 1800 об/мин. В момент, когда обороты двигателя чуть превысят 1800 об/мин, будет выполняться условие t<τ3 и счетчик 16 не будет успевать полностью заполняться, на выходе 8 элемента DD17.2 будет постоянно присутствовать сигнал "1", далее алгоритм работы привода соответствует описанию абзацев 2, 4 и 5 пункта 6.






Изобретение относится к области транспортного машиностроения и предназначено для установки на автомобили с механической коробкой передач для осуществления процесса отжатия-отпускания педали сцепления автомобиля в автоматическом режиме. Привод автоматического перемещения педали сцепления автомобиля содержит электромеханический привод для перемещения педали сцепления в положение отжато-отпущено, логический электронный блок управления, сигнальную связь указанного блока управления с механизмами привода автомобиля посредством датчика частоты вращения двигателя, датчика скорости автомобиля, датчика переключения коробки передач и датчика тормоза и указатель позиционного положения педали сцепления. Электромеханический привод педали сцепления выполнен в виде электродвигателя с червячной передачей, шкивом и тросом для притягивания педали к полу и отпускания в исходное положение, и трех позиционных датчиков в виде двух конечных и одного промежуточного. Один конец троса закреплен на шкиве, а другой пропущен через ролик, установленный на полу салона под педалью сцепления, и закреплен на педали сцепления автомобиля. Технический результат направлен на повышение эффективности управления сцеплением автомобиля. 9 з.п. ф-лы, 10 ил.
| АВТОМОБИЛЬ | 1998 |
|
RU2202480C2 |
| СИСТЕМА УПРАВЛЕНИЯ СЦЕПЛЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2017631C1 |
| Система управления сцеплением | 1987 |
|
SU1498644A1 |
| JP 61139523 A, 26.06.1986. | |||

