Изобретение относится к авиационной технике, а именно к оборудованию летательных аппаратов, предназначенному для транспортирования груза на внешней подвеске, и может быть использовано при выполнении строительно-монтажных работ.
Известно устройство для азимутальной ориентации груза на внешней подвеске летательного аппарата (RU 2308400, B64D 9/00, 20.10.2007), содержащее траверсу с грузовыми канатами на концах, соединенную с замком вертолета посредством сходящихся у замка связей, систему стабилизации траверсы, содержащую упругие связи, и систему ориентации траверсы в горизонтальной плоскости с приводом в виде лебедки и исполнительным звеном - тросом. К одному концу траверсы присоединена основная упругая связь системы стабилизации, а к противоположному концу траверсы присоединено исполнительное звено - трос лебедки посредством нескольких блоков. Один или несколько блоков установлены на противоположном конце траверсы, а другие блоки прикреплены к корпусу вертолета. Трос лебедки поочередно огибает блоки с образованием полиспаста, у которого блоки, прикрепленные к траверсе, являются подвижными, а блоки, закрепленные на корпусе вертолета, - неподвижными. Конец троса, сходящий с полиспаста, подсоединен к дополнительной упругой связи, жесткость которой меньше, чем у основной упругой связи. Упругие связи стабилизирующей системы могут быть выполнены в виде резиновых амортизаторов или пружин. Положение груза стабилизируется за счет сил сопротивления, возникающих в обеих упругих связях при изменении их длины.
Недостатком этой системы являются ограничения по азимутальному углу поворота траверсы, обусловленные упругой связью системы стабилизации.
Известна система внешней подвески грузов к вертолету (RU 2189925, B64D 9/00, B64C 27/00, 27.09.2001), содержащая электролебедку, грузонесущий кабель, закрепленный на лебедке, грузонесущее приспособление, сопряженное с силовым электрозамком и закрепленное на другом конце грузонесущего кабеля с возможностью вращения относительно последнего, и механизм ориентирования грузонесущего кабеля в виде вентиляторного движителя с аэродинамическим рулем управления. При этом вентиляторный движитель электрически соединен с устройством управления системы.
Недостатком устройства являются ограничения по азимутальному углу поворота внешней подвески, обусловленные применением аэродинамического руля управления механизмом ориентирования грузонесущего кабеля. Другим недостатком является невозможность демпфировать возникающие в полете продольные и боковые колебания груза относительно летательного аппарата, вызванные ветровыми воздействиями и инерционностью груза.
Известно устройство для азимутальной ориентации груза на внешней подвеске летательного аппарата (RU 2307049, B64D 1/22, 27.09.2007 - наиболее близкий аналог заявляемого технического решения), также использующее для создания вращающего момента аэродинамические средства и содержащее траверсу с грузовыми канатами на концах, соединенную с замком летательного аппарата посредством сходящихся связей, и ориентирующую систему, сопряженную с траверсой с возможностью передачи ей крутящего момента. Для этого система ориентации снабжена расположенными радиально в плоскости кольцевого монорельса секционированными профилированными аэродинамическими щитками, взаимодействующими с воздушным потоком несущего винта вертолета, причем каждая секция щитков снабжена механизмами уборки-выпуска их в полете, что в совокупности обеспечивает управляемую аэродинамическую стабилизацию и азимутальную ориентацию груза на внешней подвеске.
Недостатком устройства является многоэлементность, громоздкость и сложность конструкции: кольцевого монорельса и средств его крепления на летательном аппарате, элементов компоновки аэродинамических щитков и механизма изменения их положения, сложность сопряжения этих элементов конструкции с несущей траверсой. Все это затрудняет его эксплуатацию.
Другим недостатком устройства является сложность управления средствами ориентации груза при его использовании, обусловленная зависимостью от воздушного потока, индуцированного несущим винтом вертолета, и от набегающего потока воздуха при создании необходимого момента на траверсе, а также необходимость контроля за состоянием связей устройства с вертолетом и между собой для предотвращения возникновения возможных их перехлестов на этапах взлета и подцепки груза. Это приводит к снижению надежности и безопасности устройства.
Задачей заявляемого изобретения является упрощение и повышение надежности устройства при обеспечении разворота груза в полете на любой требуемый угол, обеспечение демпфирования колебаний груза относительно летательного аппарата, а также повышение безопасности при его использовании.
Поставленная задача решена благодаря тому, что в устройстве для азимутальной ориентации груза на внешней подвеске летательного аппарата, содержащем траверсу с грузовыми канатами на концах, соединенную с замком летательного аппарата посредством сходящихся связей, и ориентирующую систему, сопряженную с траверсой с возможностью передачи ей вращающего момента, согласно изобретению ориентирующая система выполнена в виде двух воздушных движителей, установленных на концах траверсы, причем каждый движитель имеет средства управления тягой, а на борту летательного аппарата установлен связанный с ними блок управления тягой воздушных движителей. Воздушные движители могут выполняться в виде воздушных винтов или движителей с реактивной тягой.
Установка на концах траверсы двух движителей позволяет получить пару сил, создающих вращающий момент для разворота траверсы с грузом в нужном направлении. Замок внешней подвески обеспечивает разворот траверсы с грузом на любой требуемый угол из любого исходного положения.
Воздушные движители ориентирующей системы, выполненные в виде воздушных винтов, снабжены электроприводами, а средства управления тягой каждого воздушного винта содержат механизм изменения угла атаки лопастей для изменения общего шага воздушного винта и привод механизма, связанный с блоком управления тягой воздушных винтов. Благодаря этому устройство позволяет осуществить не только разворот груза, но и демпфирование колебаний относительно вертолета и режим реверса тяги винта.
Механизм изменения угла атаки лопастей может быть снабжен дополнительно средством изменения циклического шага лопастей, что позволит изменять и величину, и направление создаваемой аэродинамической силы.
Возможность изменения величины и направления создаваемой винтами аэродинамической силы позволяет повысить точность и быстродействие ориентирующей системы и обеспечить демпфирование колебаний груза относительно вертолета.
Возможна установка воздушных винтов на траверсе с помощью кардана, что повышает возможности демпфирования груза за счет поворота вектора тяги в направлении, противоположном наибольшему отклонению груза от вертикали.
Для контроля положения траверсы с грузом устройство снабжено измерителем азимута индукционного типа и измерителем вертикали пузырькового типа, расположенными на траверсе, а также задатчиком и указателем азимута, расположенными на борту летательного аппарата, которые связаны с блоком управления тягой воздушных движителей.
Питание установленных на траверсе электроприводов воздушных винтов и приводов механизмов, предназначенных для управления тягой винтов, осуществляется от источников электроэнергии на борту летательного аппарата (вертолета) через связывающий их многожильный электрический кабель. Он же связывает установленные на траверсе измерительные приборы с блоками системы управления тягой винтов, расположенными на борту вертолета.
Управляющие приводы систем управления тягой винта осуществляют изменение общего или циклического шага винтов двигателя, изменяя величину или направление создаваемой аэродинамической силы. В простейшем случае для разворота траверсы по азимуту движители жестко закрепляются на концах траверсы и управление тягой осуществляется только изменением общего шага винтов.
В качестве механизмов для изменения общего шага и циклического шага лопастей могут использоваться различные типы устройств, аналогичных по конструкции автомату перекоса несущего винта вертолета одновинтовой схемы. Привод механизмов изменения угла атаки лопастей воздушных винтов может выполняться в виде, например, раздвижной тяги с электроприводом.
Для безопасности эксплуатации устройства лопасти движителей должны быть закрыты защитной сеткой. Предложенное выполнение исполнительных средств ориентирующей системы существенно упрощает устройство и его эксплуатацию. Устройство легко и быстро монтируется и может управляться автоматически в соответствии с программой по заданному азимутальному положению груза или по курсу летательного аппарата. Возможности устройства по уменьшению раскачки груза за счет гашения колебаний служат повышению его безопасности.
Изобретение поясняется чертежами, на которых на фиг.1 представлено устройство азимутальной ориентации груза на внешней подвеске при проведении авиационных строительно-монтажных работ; на фиг.2 - блок управления тягой воздушных движителей с задатчиком азимута и с указателем текущего азимута.
Внешняя подвеска состоит из траверсы 1 с грузовыми канатами 2 на концах, к которым крепится груз 3, и связей 4, соединяющих траверсу 1 с замком 5 системы внешней подвески летательного аппарата - вертолета 6. Ориентирующая система устройства азимутальной ориентации груза на внешней подвеске включает два воздушных движителя 7 и 8 с электроприводами (не показаны). Движители 7 и 8 установлены на концах траверсы 1 с возможностью создания создании парой аэродинамических сил вращающего момента или демпфирующих воздействий для траверсы 1 с грузом 3. Устройство движителей 7 и 8 с системами управления тягой винтов аналогично устройству рулевого или несущего винта вертолета одновинтовой схемы. Замок внешней подвески 5 обеспечивает возможность поворота траверсы 1 на 360 градусов.
Электроприводы движителей 7 и 8 вместе с управляющими приводами систем управления тягой винтов (не показаны) связаны посредством многожильного электрического кабеля 9 с источником электроэнергии и блоком управления 10 тягой движителей, например тягой воздушных винтов, установленными на борту вертолета 6. Для измерения ориентации груза 3 по азимуту на траверсе 1 (фиг.1) установлен измеритель азимута 11, например, индукционного типа. Для измерения отклонения траверсы 1 от вертикали на ней расположен измеритель вертикали 12, например, пузырькового (гироскопического) типа. Измеритель азимута 11 и измеритель вертикали 12 соединены с блоком управления тягой 10 посредством электрического многожильного кабеля 9. Блок управления 10 содержит указатель текущего азимута 13 и задатчик азимута 14, соединенные в одном приборе типа НПП, необходимые экипажу летательного аппарата 6 для контроля и управления положением траверсы 1 по азимуту.
При осуществлении авиационных строительно-монтажных работ груз 3 крепится к траверсе 1 грузовыми канатами 2. С помощью связей 4 траверса 1 крепится к замку 5 летательного аппарата 6. Замок 5 обеспечивает возможность поворота траверсы 1, а вместе с ней и груза 3 на 360 градусов. После вертикального взлета летательного аппарата 6 груз 3 принимает произвольное положение по азимуту, которое зависит от направления полета, состояния атмосферы, формы груза и т.п. Электропривод движителей 7 и 8 через электрический многожильный кабель 9 подключается к источнику электроэнергии и начинает вращать лопасти движителей 7 и 8 с постоянной скоростью. Углы атаки лопастей нулевые, и движители 7 и 8 не создают аэродинамической силы. Для ориентирования груза 3 по азимуту экипаж задает значение азимутального угла груза 3 посредством задатчика азимута 14 на блоке управления 10 и наблюдает текущее значение азимута траверсы 1 по указателю текущего азимута 13. Сигнал текущего азимута на указатель текущего азимута 13 поступает через электрический многожильный кабель 9 от измерителя азимута 11. При наличии рассогласования сигналов от задатчика азимута 14 и измерителя азимута 11 в блоке управления 10 формируются сигналы управления движителями, пропорциональные сигналу рассогласования, но имеющими для движителей 7 и 8 разный знак. Под действием сигналов управления, поступающих через электрический многожильный кабель 9 в управляющие приводы систем управления тягой винтов движителей 7 и 8 из блока управления 10, системы управления тягой винтов изменяют общий шаг винтов движителей 7 и 8, которые создают аэродинамические силы, направленные в разные стороны. Пара сил от движителей 7 и 8 создает вращающий момент, который разворачивает траверсу 1, а вместе с ней и груз в направлении заданного азимута. При совпадении текущего и заданного азимута сигналы с блока управления 10 на движители 7 и 8 не поступают и движители работают с нулевым углом атаки лопастей винтов. В режиме висения летательного аппарата 6 экипаж, изменяя положение задатчика азимута 14, имеет возможность развернуть груз 3 в необходимом для монтажа направлении, не производя никаких маневров летательного аппарата 6. В блоке управления 10 может также формироваться сигнал управления движителями 7 и 8 не от задатчика азимута 14, а от навигационной системы летательного аппарата 6. В этом режиме траверса 1 стабилизирует груз 3 по курсу летательного аппарата 6 или по другому заданному навигационной системой курсу. Это может понадобиться для снижения аэродинамического сопротивления груза 3 при поступательном движении летательного аппарата 6.
При возникновении колебаний груза 3 относительно летательного аппарата 6 траверса 1 отклоняется от вертикали. Сигнал с измерителя вертикали 12 через электрический многожильный кабель 9 поступает в блок управления 10, в котором формируются сигналы управления управляющими приводами систем управления тягой винтов движителей 7 и 8, передающиеся по электрическому многожильному кабелю 9. Под действием управляющих приводов системы управления тягой винтов изменяют циклический шаг винтов движителей 7 и 8, что приводит к отклонению векторов аэродинамических сил движителей в сторону, противоположную отклонению траверсы 1 от вертикали.
Применение устройства для азимутальной ориентации груза на внешней подвеске летательного аппарата позволяет обеспечить стабилизацию груза относительно вертолета и его заданную ориентацию при проведении авиационных строительно-монтажных работ.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ АЗИМУТАЛЬНОЙ ОРИЕНТАЦИИ И СТАБИЛИЗАЦИИ ГРУЗА НА ВНЕШНЕЙ ПОДВЕСКЕ ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2307049C1 |
| УСТРОЙСТВО ДЛЯ АЗИМУТАЛЬНОЙ ОРИЕНТАЦИИ И ФИКСАЦИИ ГРУЗА НА ВНЕШНЕЙ ПОДВЕСКЕ ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2209745C2 |
| УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВАНИЯ И МОНТАЖА ГРУЗА ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2007 |
|
RU2350511C1 |
| УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВАНИЯ И МОНТАЖА ГРУЗА ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2007 |
|
RU2372252C2 |
| ВИНТОКРЫЛ | 2012 |
|
RU2500578C1 |
| СПОСОБ МОНТАЖА ГРУЗА С ПОМОЩЬЮ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2136547C1 |
| УСТРОЙСТВО ДЛЯ АЗИМУТАЛЬНОЙ ОРИЕНТАЦИИ И ФИКСАЦИИ ГРУЗА НА ВНЕШНЕЙ ПОДВЕСКЕ ВЕРТОЛЕТА | 1992 |
|
RU2028968C1 |
| СИСТЕМА ВОЗДУШНОГО НАБЛЮДЕНИЯ | 2010 |
|
RU2428355C1 |
| УСТРОЙСТВО ДЛЯ МОНТАЖА ГРУЗА ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2000 |
|
RU2174090C1 |
| СИСТЕМА ВНЕШНЕЙ ПОДВЕСКИ ГРУЗА К ВЕРТОЛЕТУ | 1991 |
|
RU2015073C1 |
Изобретение относится к области авиации, более конкретно, к устройству для азимутальной ориентации груза на внешней подвеске летательного аппарата. Устройство содержит траверсу с грузовыми канатами на концах, соединенную с замком летательного аппарата посредством сходящихся связей, и ориентирующую систему, сопряженную с траверсой с возможностью передачи ей вращающего момента. Ориентирующая система выполнена в виде двух воздушных движителей, установленных на концах траверсы, причем каждый движитель имеет средства управления тягой. На борту летательного аппарата установлен связанный с ними блок управления тягой воздушных движителей. Технический результат заключается в упрощении конструкции устройства, обеспечении демпфирования груза относительно летательного аппарата и повышении безопасности при использовании устройства. 4 з.п. ф-лы, 2 ил.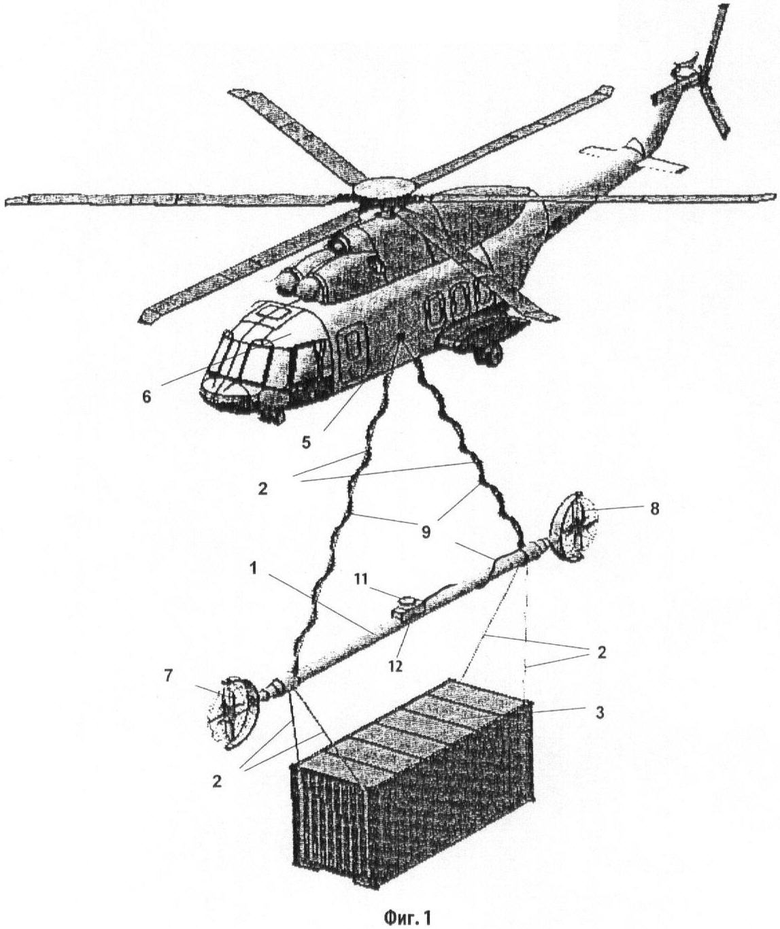
1. Устройство для азимутальной ориентации груза на внешней подвеске летательного аппарата, содержащее траверсу с грузовыми канатами на концах, соединенную с замком летательного аппарата посредством сходящихся связей, и ориентирующую систему, сопряженную с траверсой с возможностью передачи ей вращающего момента, отличающееся тем, что ориентирующая система выполнена в виде двух воздушных движителей, установленных на концах траверсы, причем каждый движитель имеет средства управления тягой, а на борту летательного аппарата установлен связанный с ними блок управления тягой воздушных движителей.
2. Устройство по п.1, отличающееся тем, что воздушные движители ориентирующей системы выполнены в виде воздушных винтов, снабженных электроприводами, при этом средства управления тягой каждого воздушного винта включают механизм изменения угла атаки лопастей для изменения общего шага воздушного винта и привод механизма, связанный с блоком управления тягой воздушных винтов.
3. Устройство по п.2, отличающееся тем, что механизм изменения угла атаки лопастей снабжен дополнительно средством изменения циклического шага лопастей.
4. Устройство по п.2, отличающееся тем, что каждый воздушный винт установлен на траверсе с помощью кардана.
5. Устройство по п.1 или 2, отличающееся тем, что оно снабжено измерителем азимута индукционного типа и измерителем вертикали пузырькового типа, расположенными на траверсе, а также задатчиком и указателем азимута, расположенными на борту летательного аппарата, которые связаны с блоком управления тягой воздушных движителей.
| УСТРОЙСТВО ДЛЯ АЗИМУТАЛЬНОЙ ОРИЕНТАЦИИ И СТАБИЛИЗАЦИИ ГРУЗА НА ВНЕШНЕЙ ПОДВЕСКЕ ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2307049C1 |
| Система внешней подвески груза к вертолету | 1982 |
|
SU1045519A1 |
| СИСТЕМА ВНЕШНЕЙ ПОДВЕСКИ ГРУЗА К ВЕРТОЛЕТУ | 2001 |
|
RU2189925C1 |
| US 3838836 А, 01.10.1974 | |||
| US 3904156 А, 09.09.1975 | |||
| УСТРОЙСТВО ДЛЯ АЗИМУТАЛЬНОЙ ОРИЕНТАЦИИ ГРУЗА НА ВНЕШНЕЙ ПОДВЕСКЕ ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2308400C2 |

