Изобретение относится к космическим аппаратам, а именно к наноспутникам - космическим аппаратам массой до 10 кг, предназначенным для съемки поверхности Земли и передачи изображения.
Одним из основных преимуществ наноспутников является то, что их запуск на орбиту функционирования осуществляется попутным способом с использованием специальных адаптеров, устанавливаемых на основной спутник. Адаптация наноспутника к ракете-носителю при попутном запуске осуществляется в условиях ограничений по энергетическим возможностям используемой ракеты-носителя, а также в условиях ограничений по зоне полезного груза головного аэродинамического обтекателя.
На возможность монтажа наноспутника в ограниченной зоне существенную роль играет способ закрепления панелей солнечной батареи на корпусе наноспутника. Как известно, эффективным способом сокращения размеров солнечной батареи при его размещении на ракете-носителе является использование складываемых панелей солнечной батареи. Но в этом случае значительно усложняется конструкция самих панелей, увеличивается их масса и снижается надежность раскрытия панелей. В этой связи для наноспутников наиболее предпочтительным является использование нераскрываемых панелей солнечной батареи, располагаемых на боковых поверхностях корпуса спутника.
Известен спутник, содержащий корпус с размещенными на нем приборами служебной и целевой аппаратуры и панель солнечной батареи, расположенную сбоку относительно корпуса и жестко на нем закрепленную (см. журнал «Новости комонавтики», №6, июнь 1999 г., стр.3, 4).
Конструктивно спутник содержит модуль телескопа, расположенный на одном из торцов спутника и включающий трубу телескопа с зеркальной системой и крышкой. Крышка закрывает зеркальную систему и несет звездные камеры. Этим же торцом спутник крепится к ракете-носителю.
Недостатки компоновки данного спутника обусловлены тем, что использована продольная компоновка элементов спутника, при которой продольная ось спутника совпадает или параллельна продольной оси модуля телескопа. Данное обстоятельство увеличивает общую длину спутника, что является недостатком.
Кроме того, по условиям адаптации спутника к ракете-носителю панель солнечной батареи данного спутника выполнена прямоугольно-трапециевидной формы. В верхней части панель выполнена сужающейся и имеет вид равнобедренной трапеции. Отказ от чисто прямоугольной формы панели продиктован необходимостью размещения панели и спутника в целом в верхней сужающейся конической части головного аэродинамического обтекателя ракеты-носителя.
Недостатком является то, что за счет трапециевидной формы верхней части панели увеличивается на (5-9)% длина панели солнечной батареи по отношению к чисто прямоугольной панели. Кроме того, плотность заполнения фотоэлементами трапециевидной части панели ниже по отношению к прямоугольной форме панели, что еще больше увеличивает высоту панели солнечной батареи.
Кроме того, продольная ось телескопа параллельна панели солнечной батареи, что не является оптимальным с точки зрения солнечной освещенности панели при работе звездных камер, когда спутник ориентирован продольной осью на Землю.
Наиболее близким к заявляемому наноспутнику является спутник, содержащий корпус с приборами целевой и служебной аппаратуры, на одном из торцов которого смонтирована система отделения спутника, а на противоположном торце - камера для съемки поверхности Земли. Камера расположена так, что ее продольная ось параллельна стыковочной плоскости спутника. Три панели солнечной батареи расположены вокруг спутника, при этом каждая панель жестко закреплена на корпусе и расположена под углом к стыковочной плоскости спутника, при этом угол наклона превышает 90° (см. ООО «Издательство «РЕСТАРТ», выпуск №12, 2005 (32), стр.4, 5). Данный спутник взят за прототип.
Рассмотрим недостатки спутника по прототипу, обусловленные:
- расположением панелей солнечной батареи под углом более 90° к стыковочной плоскости спутника;
- расположением камеры для съемки поверхности Земли в верхней части спутника;
- невозможностью изменения угла наклона панелей солнечной батареи к стыковочной плоскости спутника при подготовке спутника к пуску.
Разработка средств адаптации для реализации попутного запуска наноспутника наиболее целесообразно осуществляется на основе решения оптимизационной задачи по выбору проектно-конструктивных параметров системы «адаптер+наноспутник» с учетом имеющихся ограничений.
Если разработка средств адаптации наноспутника и разработка самого наноспутника осуществляется в одни и те же сроки, то данная оптимизационная задача может быть решена. При этом варьируются проектно-конструктивные параметры как адаптера, так и наноспутника. Если же наноспутник создается без адаптации к конкретной ракете-носителю и способу запуска, что в практике создания наноспутников бывает часто, то задача адаптации наноспутника к ракете-носителя решается только за счет оптимизации технических решений по адаптеру, что снижает эффективность реализации группового или попутного запуска наноспутника.
В спутнике-прототипе угол наклона панелей солнечной батареи к стыковочной плоскости превышает 90°. Кроме того, в верхней части расположена и камера для съемки поверхности Земли. Все это увеличивает поперечные габариты в верхней части спутника и значительно затрудняет его размещение при групповом и попутном запуске на адаптере ракеты-носителя, что является недостатком. Например, при попутном запуске наноспутник, как правило, располагается на основном спутнике в верхней его части в конической зоне полезного груза головного аэродинамического обтекателя. В этом случае такая форма спутника, а также расположение в верхней его части камеры для съемки поверхности Земли затрудняют размещение спутника под обтекателем.
В этом случае задача адаптации наноспутника к ракете-носителю в части его размещения на адаптере в зоне полезного груза головного обтекателя может быть решена за счет использования адаптера с поворотными платформами (см., например, патент РФ №2252902).
В этом случае при помощи поворотной платформы наноспутник устанавливается из условия размещения в заданной зоне головного обтекателя. Перед его отделением поворотная платформа поворачивается на угол, обеспечивающий безударное отделение наноспутника.
Данная схема установки и отделения спутников используется на практике, но она значительно усложняет конструкцию адаптера, увеличивает его массу и снижает надежность отделения наноспутника за счет необходимости его разворота перед отделением.
Под адаптацией наноспутника к ракете-носителю понимается не только размещение наноспутника на ракете-носителе, но и согласование и в ряде случаев обеспечение заданного уровня механического нагружения на элементы наноспутника.
Для спутника-прототипа нагрузки от ракеты-носителя на участке выведения через адаптер, систему отделения спутника, его конструкцию передаются на камеру, расположенную в верхней части спутника.
Как показывает опыт наземной экспериментальной отработки динамической прочности спутников в составе адаптеров для группового и попутного запуска и их систем отделения динамические и импульсные нагрузки, действующие на элементы спутников, определяются демпфирующими свойствами конструкции спутников, адаптеров и устройств закрепления спутников на адаптере.
В полете в плоскости стыка с ракетой-носителем действуют по трем ортогональным осям квазистационарные широкополосные случайные вибрации. Максимальные уровни полетных вибраций приходятся на момент старта и во время полета в плотных слоях атмосферы в трансзвуковом режиме.
Виброударные ускорения в плоскости стыка с ракетой-носителем возникают при запуске и выключении двигателей ступеней, разделении ступеней. Виброударные процессы представляют собой переходные затухающие вибрации. Низкочастотные виброудары возникают при включении и выключении двигателей маршевых ступеней. Высокочастотные виброудары вызываются срабатыванием пиротехнических устройств, используемых для разделения ступеней и сброса головного обтекателя.
Обычно при разработке адаптера для попутного (или группового) запуска спутника ставится задача снижения вибродинамических и ударных нагрузок (см., например, патент №. №2248310). Это связано с тем, что конструкция и приборы запускаемых спутников могут не выдерживать действующие нагрузки либо от ракеты-носителя, либо от систем отделения.
В спутнике по прототипу на участке выведения ракеты-носителя камера расположена в верхней части спутника и является самым чувствительным к механическим нагрузкам элементом. В этом случае задача обеспечения требуемых значений механических нагрузок на камеру наиболее оптимально может быть решена только с учетом подбора требуемых демпфирующих свойств конструкции спутника, что требует доработок конструкции и является существенным недостатком спутника-прототипа. Кроме того, и на систему амортизации адаптера накладываются дополнительные требования по учету демпфирующих свойств конструкции спутника, что усложняет систему амортизации и является недостатком.
Для спутников, используемых для съемки поверхности Земли, ставится задача по максимальной освещенности панелей солнечной батареи во время проведения съемки.
Оценим величину эффективной площади панели солнечной батареи для спутника-прототипа при проведении сеансов съемки поверхности Земли, когда ось камеры направлена на Землю. Под эффективной площадью панели солнечной батареи будем понимать отношение мощности, отдаваемой панелью при угловом положении Солнца относительно панели, к мощности панели при максимальной освещенности панели Солнцем.
Для достижения максимальной освещенности панелей солнечной батареи во время проведения съемки угол наклона панели должен соответствовать углу Солнце-плоскость орбиты. Для заранее известного времени восходящего узла орбиты данный угол может быть определен и панель на спутнике может быть на данном угле установлена. В этом случае эффективная площадь будет максимальной для одной конкретной орбиты, для всех остальных орбит (других времен восходящего узла орбиты) эффективная площадь панели будет хуже. В этой связи жесткая установка панели на корпусе спутника-прототипа является недостатком.
Указанные недостатки спутника-прототипа снижают тактико-технические характеристики как самого спутника, так и средств его адаптации к ракете-носителю при реализации попутного запуска за счет:
- увеличения массы адаптера и снижения надежности отделения спутника за счет введения в состав адаптера для попутного запуска спутника поворотной платформы; масса поворотной платформы для спутника массой 10 кг составляет 4-5 кг;
- увеличения массы конструкции спутника для обеспечения заданных параметров жесткости с целью обеспечения допустимого уровня механического нагружения камеры для съемки поверхности Земли на участке выведения;
- увеличения массы системы демпфирования адаптера для снижения механических нагрузок на камеру;
- снижения эффективной площади панели солнечной батареи при запуске спутника на орбиту с параметрами, отличными от первоначальной орбиты, на которую был спроектирован спутник.
Целью заявляемого наноспутника является снижение массы конструкции наноспутника и средств его адаптации к ракете-носителю при попутном запуске за счет повышения плотности компоновки наноспутника, совершенствования конструктивно-компоновочной схемы и отказа от поворотной платформы адаптера, повышение надежности отделения за счет отказа от поворотной платформы, а также повышение эффективной площади панели солнечной батареи для заданного диапазона орбит.
Поставленная цель достигается тем, что на боковой поверхности корпуса установлен ложемент, шарнирно соединенный с корпусом наноспутника, причем ось поворота ложемента расположена параллельно торцевой части корпуса, а по обе стороны от оси поворота на корпусе установлены механизмы поворота и фиксации ложемента относительно корпуса в виде, например, упоров типа «винт-гайка», соединяющих корпус и ложемент между собой, причем узлы поворота и фиксации ложемента выбраны из условия расположения его опорной поверхности относительно торцевой части корпуса на угол меньше 90 градусов, при этом панель солнечной батареи жестко установлена на опорной поверхности ложемента, а камера установлена внутри корпуса наноспутника на торцевой части со стороны, противоположной узлам соединения наноспутника с системой отделения, и лежит в плоскости, проходящей через продольную ось наноспутника и перпендикулярную панели солнечной батареи, а оптическая часть камеры ориентирована в направлении от рабочей поверхности панели солнечной батареи с фотоэлементами.
Заявляемый наноспутник поясняется чертежами, на которых показано:
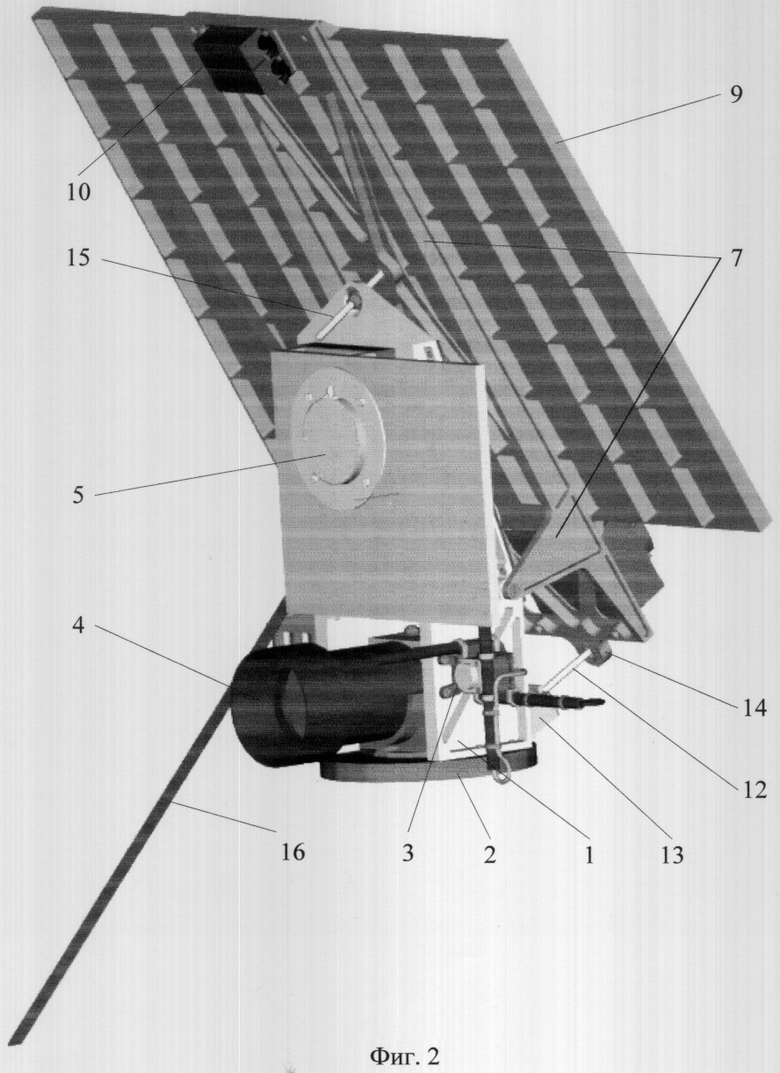
- на фиг.1, 2 - общий вид наноспутника;
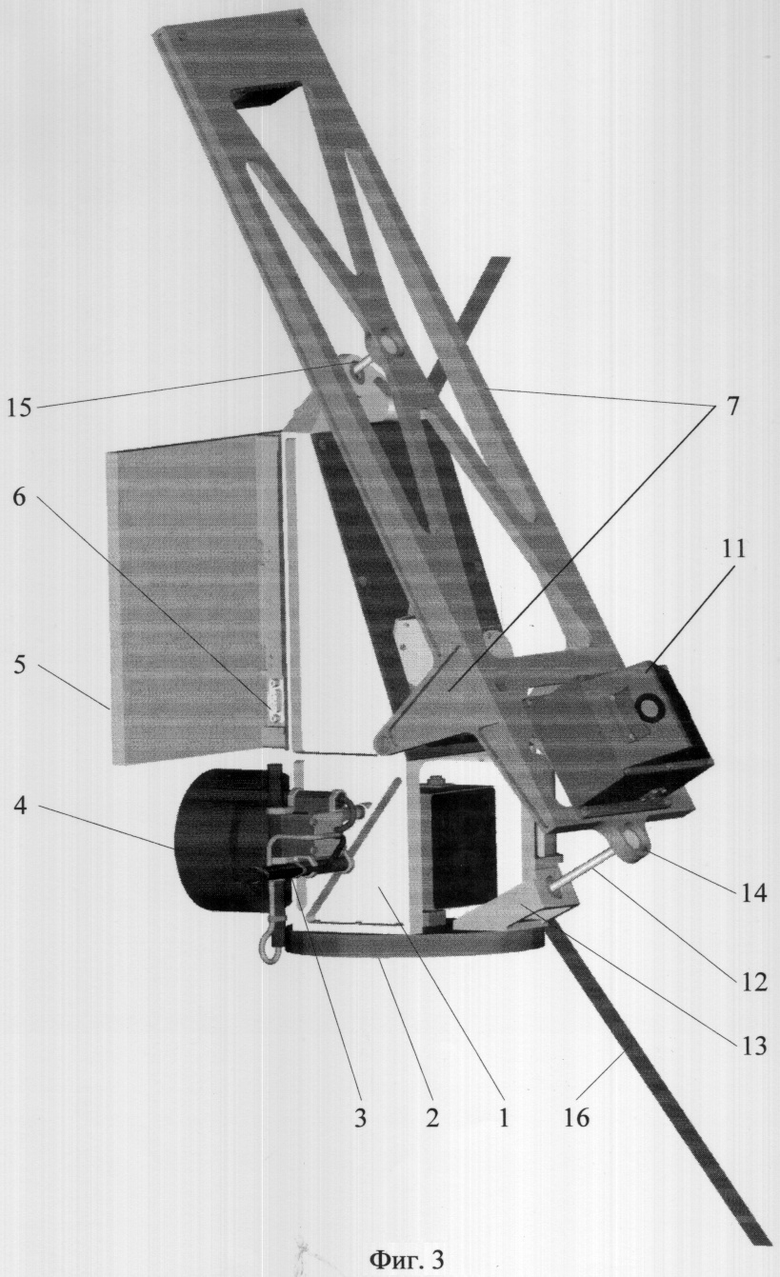
- на фиг.3 - общий вид наноспутника без панели солнечной батареи;
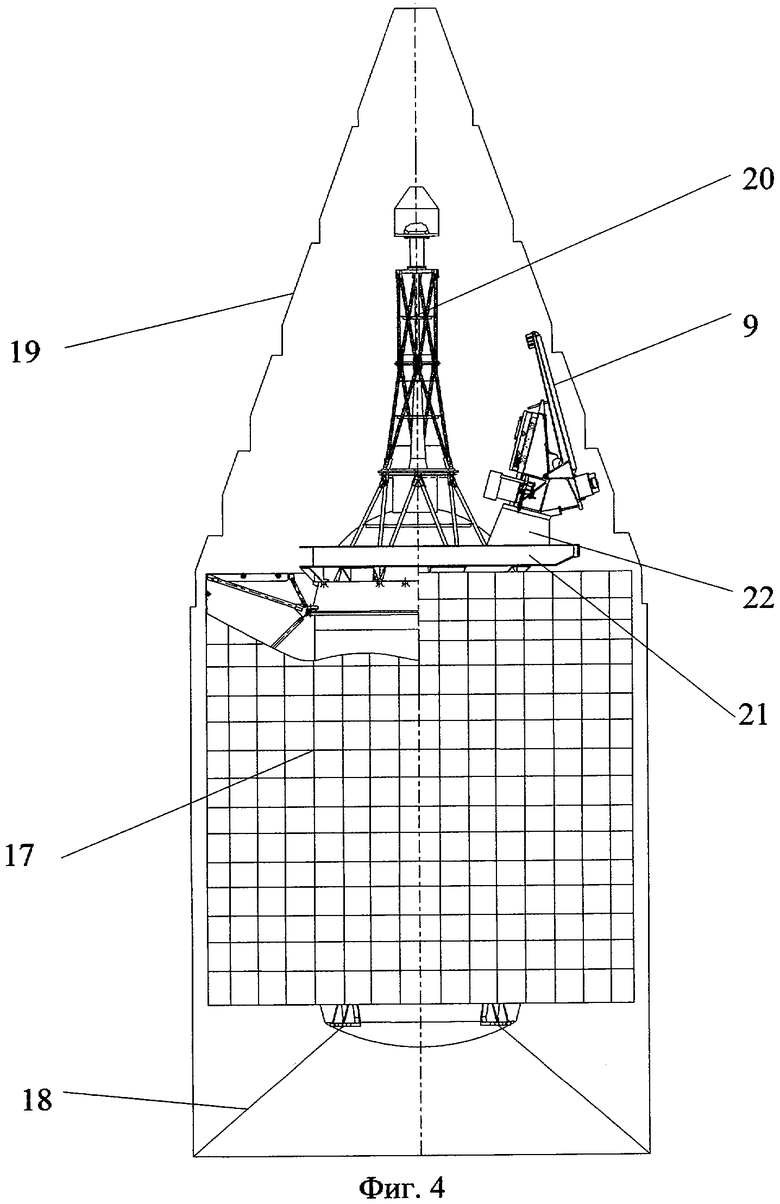
- на фиг.4 - расположение наноспутника в составе основного спутника при попутном запуске;
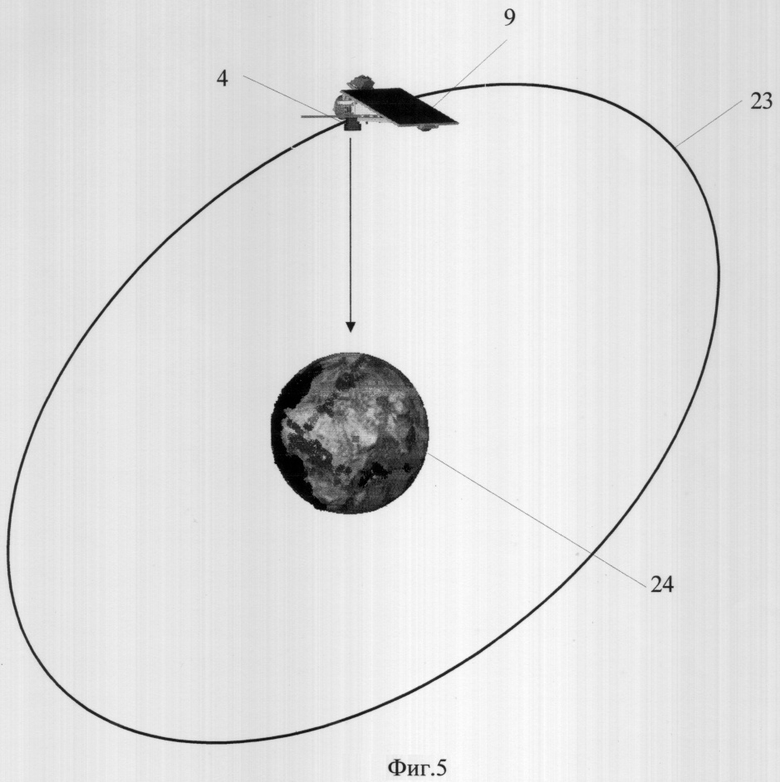
- на фиг.5 - расположение наноспутника на орбите при проведении съемки поверхности Земли.
Наноспутник содержит корпус 1, соединенный с платой 2, являющейся торцевой частью наноспутника, на которой смонтированы узлы его соединения с системой отделения (не показаны).
На корпусе 1 смонтирована целевая и служебная аппаратура, а именно: блок электромагнитных устройств 3, камера 4 для съемки поверхности Земли, передатчик 5 с антенной для передачи изображения поверхности Земли на Землю, бортовой комплекс управления 6 и другая аппаратура (на чертеже не показана).
На корпусе 1 установлен ложемент 7, закрепленный при помощи шарнирных узлов 8. Ось поворота ложемента расположена параллельно торцевой части корпуса. На ложементе 7 смонтированы панель солнечной батареи 9, магнитометры 10 и солнечный датчик 11. Поворот ложемента 7 относительно корпуса 1 и его фиксация обеспечивается винтовым механизмом 12 типа винт-гайка, установленным в кронштейне 13 корпуса 1 и в кронштейне 14 ложемента и аналогичным винтовым механизмом 15. Конструктивно корпус 1 и ложемент 7 выполнены так, что винтовые механизмы 12, 15 обеспечивают поворот и фиксацию ложемента относительно опорной поверхности платы 2 (относительно торцевой части корпуса) на угол меньше 90 градусов. Такое расположение панели солнечной батареи 9 обеспечивает повышенную плотность компоновки всего наноспутника в зоне полезного груза головного обтекателя ракеты-носителя.
Для обеспечения радиосвязи с наноспутником на нем расположены гибкие ленточные антенны 16.
Камера 4 для съемки поверхности Земли смонтирована на плате 2 со стороны, противоположной узлам соединения с системой отделения, при этом ее продольная ось параллельна опорной поверхности платы 2 и лежит в плоскости, проходящей через продольную ось наноспутника и перпендикулярную панели солнечной батареи 9. Оптическая часть камеры ориентирована в направлении от рабочей поверхности панели солнечной батареи 9 с фотоэлементами.
При попутном запуске наноспутник устанавливается на основном спутнике 17, который закреплен на участке выведения на раме полезной нагрузки 18 ракеты-носителя. Основной спутник 17 и попутный наноспутник на участке выведения располагаются под головным аэродинамическим обтекателем (сам обтекатель не показан) в зоне полезного груза 19. В приведенном примере зона монтажа наноспутника ограничена конической частью зоны полезного груза 19 и штангой 20 гравитационного устройства основного спутника 17. В этой связи нижнее расположение камеры на наноспутнике позволяет наиболее полно использовать зону монтажа. Кроме того, освобождается зона поворота панели 9 солнечной батареи относительно корпуса 1 наноспутника.
Установка наноспутника осуществляется при помощи адаптера 21, смонтированного в верхней части основного спутника.
Установка наноспутника осуществляется при помощи системы отделения 22, которая обеспечивает ориентацию наноспутника в направлении его отделения. В этом случае угол между продольной осью наноспутника и продольной осью основного спутника должен обеспечивать безударное отделение наноспутника. Выполнение панели солнечной батареи 9 поворотной позволяет оптимизировать установку наноспутника по параметрам безударности его отделения и эффективной площади солнечной батареи для конкретного запуска.
Наноспутник на системе отделения ориентируется так, чтобы панель 9 солнечной батареи была расположена вблизи зоны полезного груза 19. Такое расположение обеспечивает наибольший угол наклона наноспутника от штанги 20 гравитационного устройства основного спутника.
Адаптация наноспутника к основному спутнику на этапе его разработки включает следующие основные работы:
- определение зоны монтажа наноспутника и граничных условий;
- определение угла безударного отделения наноспутника (αот (vот)) для заданной скорости отделения (данный угол может быть изменен путем варьирования усилиями толкателей системы отделения) и принятых размерах панели 9 солнечной батареи (хд, уп);
- определение угла наклона панелей 9 для обеспечения безударного отделения наноспутника (αот (vот)) и расположения его в зоне монтажа (βб, м);
- определения зависимости угла наклона панели 9 солнечной батареи от эффективной площади солнечной батареи для конкретных и предполагаемых параметров орбиты запуска ((βэп(zорб);
- нахождение проектно-конструкторских параметров наноспутника на основе решения задачи по минимизации суммарной массы наноспутника и средств его адаптации (в данном случае системы отделения) при имеющихся ограничениях по зоне монтажа
MΣ((αот(vот, (хп, уп), (βб, м), (βэп(zорб)=MΣmin
Введение в процесс оптимизации массы дополнительных по отношению к спутнику-прототипу переменных (βб, м), (βэп(zорб), a также нижнее расположение камеры на корпусе позволяет снизить суммарную массу наноспутника и средств его адаптации, что является преимуществом заявляемого наноспутника.
Выведение наноспутника на орбиту функционирования и типовая циклограмма работы такого наноспутника на солнечной синхронной орбите выглядит следующим образом.
На участке выведения при попутном запуске наноспутник установлен согласно фиг.4 на основном спутнике 17. Вибродинамические и ударные нагрузки на наноспутник от ракеты-носителя передаются через основной спутник 17, адаптер 21 и систему отделения 22. При этом корпус наноспутника 1 практически не влияет на передачу данных нагрузок на камеру 4 наноспутника, являющейся самым чувствительным элементом. Это снижает массу корпуса из-за исключения дополнительных требований к нему по жесткости.
При выведении основного спутника 17 на заданную орбиту он вместе с наноспутником отделяется, после чего происходит отделение наноспутника от основного спутника и переход на бортовое питание.
После этого система ориентации и стабилизации подключает магнитометры 10 и электромагнитные устройства 3 и производит первоначальное успокоение наноспутника и ориентацию его по магнитному полю Земли. После успокоения система ориентации и стабилизации ожидает появление Солнца на любом из фотодиодов или тока на панели 9 солнечной батареи, включает солнечный датчик 11, управляющий двигатель-маховик (не показан) и ориентирует панель 9 солнечной батареи на Солнце. В тени солнечный датчик и управляющие двигатели-маховики выключаются и происходит сброс накопившегося кинетического момента.
Затем производится закладка на борт реального времени и начальных условий баллистического обеспечения и по команде с Земли система ориентации и стабилизации переводится в режим штатной эксплуатации.
При выходе из тени Земли наноспутник включает управляющие двигатели-маховики и переходит в режим солнечной ориентации, одновременно контролируя заданный угол возвышения Солнца в орбитальной системе координат.
При превышении этого угла заданного наноспутник переходит в орбитальную ориентацию, включает камеру и начинает съемку поверхности Земли. После опускания Солнца за тот же угол происходит опять перевод наноспутника в режим солнечной ориентации и он накапливает энергию до входа в тень.
Заявляемый наноспутник по сравнению с прототипом обеспечивает:
- снижение массы корпуса конструкции наноспутника за счет расположения камеры для съемки поверхности Земли в нижней части на 16-17% и повышения плотности компоновки;
- для наноспутника массой 10 кг масса адаптера для попутного запуска за счет повышения плотности компоновки наноспутника путем расположения камеры для съемки поверхности Земли в нижней части корпуса и использования поворотной панели солнечной батареи масса адаптера снижается на 4-5 кг за счет отказа от поворотной платформы адаптера для размещения наноспутника в ограниченной зоне обтекателя;
- повышение надежности отделения при попутном запуске за счет отказа от поворотной платформы адаптера;
- повышение эффективной площади панели солнечной батареи для заданного диапазона орбит.
| название | год | авторы | номер документа |
|---|---|---|---|
| МИКРОСПУТНИК ДЛЯ ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ ПОВЕРХНОСТИ ЗЕМЛИ | 2010 |
|
RU2457157C1 |
| МИНИ-СПУТНИК ДЛЯ ГРУППОВОГО И ПОПУТНОГО ЗАПУСКОВ | 2005 |
|
RU2293688C1 |
| МИКРОСПУТНИК | 2004 |
|
RU2268205C2 |
| КОСМИЧЕСКАЯ ГОЛОВНАЯ ЧАСТЬ ДЛЯ ОДИНОЧНОГО И ГРУППОВОГО ЗАПУСКОВ СПУТНИКОВ | 2005 |
|
RU2293689C2 |
| МНОГОЦЕЛЕВАЯ СЛУЖЕБНАЯ ПЛАТФОРМА ДЛЯ СОЗДАНИЯ КОСМИЧЕСКИХ АППАРАТОВ | 2008 |
|
RU2375267C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ЭЛЕКТРОЭНЕРГИЕЙ АППАРАТУРЫ КОСМИЧЕСКОГО АППАРАТА И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2271968C2 |
| СИСТЕМА ОТДЕЛЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2012 |
|
RU2514981C2 |
| Адаптер для установки космических аппаратов | 2017 |
|
RU2661375C1 |
| КОСМИЧЕСКАЯ ПЛАТФОРМА | 2014 |
|
RU2569658C2 |
| СТУПЕНЬ РАКЕТЫ-НОСИТЕЛЯ ДЛЯ ЛЕТНО-КОНСТРУКТОРСКИХ ИСПЫТАНИЙ | 2002 |
|
RU2242410C2 |
Изобретение относится к спутникам малой массы (до 10 кг), запускаемых преимущественно попутно. Согласно изобретению на боковой поверхности корпуса наноспутника установлен ложемент, шарнирно соединенный с корпусом. Ось поворота ложемента расположена параллельно торцевой части корпуса, а по обе стороны от этой оси установлены механизмы поворота и фиксации ложемента относительно корпуса (напр., типа "винт-гайка"). Эти механизмы обеспечивают расположение опорной поверхности ложемента относительно торцевой части корпуса под углом, меньшим 90 градусов. Панель солнечной батареи жестко установлена на указанной опорной поверхности ложемента. Камера для съемки поверхности Земли установлена внутри корпуса наноспутника на торцевой его части со стороны, противоположной узлам соединения наноспутника с системой отделения. Эта камера лежит в плоскости, проходящей через продольную ось наноспутника и перпендикулярной панели солнечной батареи. Оптическая часть камеры ориентирована в направлении от рабочей поверхности панели солнечной батареи. Техническим результатом изобретения является снижение массы конструкции наноспутника с адаптером при реализации попутных запусков и повышение эффективной площади солнечной батареи для заданного диапазона орбит. 5 ил.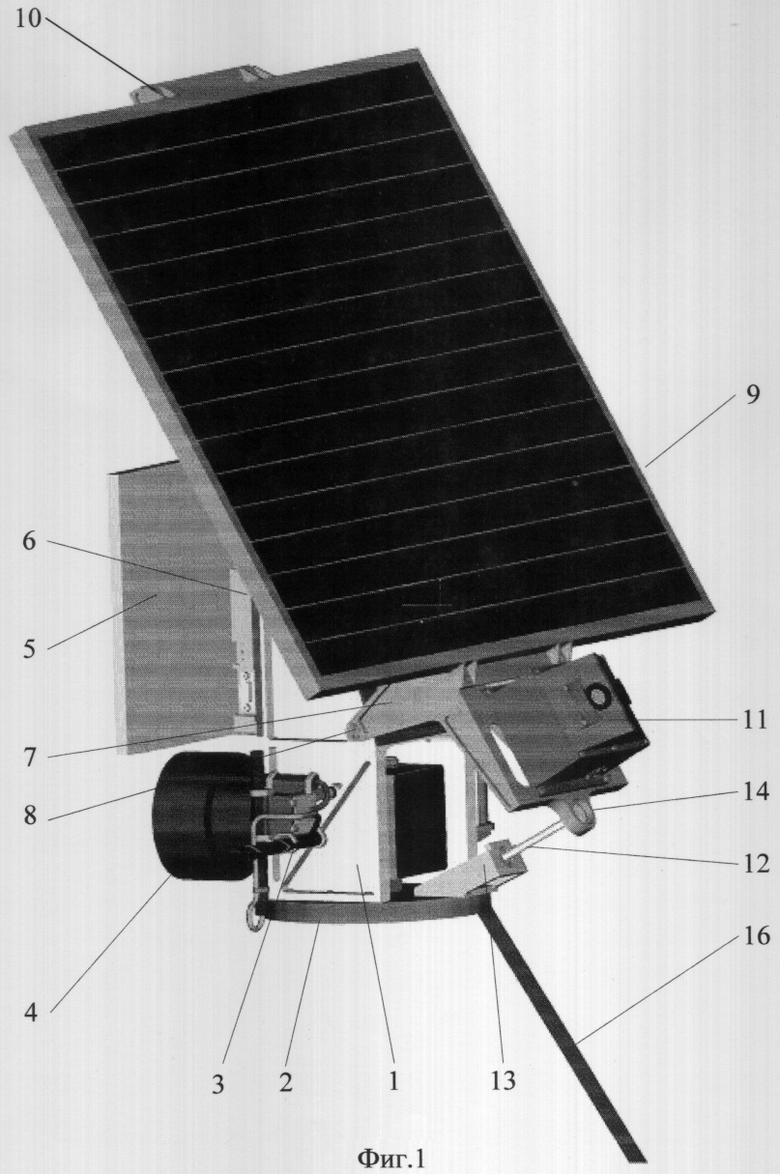
Наноспутник, содержащий корпус с расположенными на нем приборами целевой и служебной аппаратуры, расположенные на торцевой части корпуса узлы соединения наноспутника с системой отделения, установленную в корпусе камеру для съемки поверхности Земли, продольная ось которой расположена параллельно торцевой части корпуса, и панель солнечной батареи, закрепленную на боковой поверхности корпуса под углом к торцевой его части, отличающийся тем, что на боковой поверхности корпуса установлен ложемент, шарнирно соединенный с корпусом наноспутника так, что ось поворота ложемента расположена параллельно торцевой части корпуса, а по обе стороны от оси поворота на корпусе установлены механизмы поворота и фиксации ложемента относительно корпуса, например, типа "винт-гайка", соединяющие корпус и ложемент между собой, причем данные механизмы поворота и фиксации обеспечивают расположение опорной поверхности ложемента относительно торцевой части корпуса под углом, меньшим 90°, панель солнечной батареи жестко установлена на указанной опорной поверхности ложемента, а указанная камера установлена внутри корпуса наноспутника на торцевой его части со стороны, противоположной узлам соединения наноспутника с системой отделения, и лежит в плоскости, проходящей через продольную ось наноспутника и перпендикулярной панели солнечной батареи, при этом оптическая часть камеры ориентирована в направлении от рабочей поверхности панели солнечной батареи с фотоэлементами.
| Искусственный спутник | |||
| ООО «Издательство «РЕСТАРТ» | |||
| Вып | |||
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
| Новости космонавтики | |||
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| US 6543724 A, 08.04.2003 | |||
| УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВКИ И ОТДЕЛЕНИЯ ПОЛЕЗНОЙ НАГРУЗКИ ОТ КОСМИЧЕСКОГО ОБЪЕКТА | 1999 |
|
RU2151086C1 |
| УСОВЕРШЕНСТВОВАНИЕ КОСМИЧЕСКИХ АППАРАТОВ ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ ИЛИ СВЯЗИ | 1997 |
|
RU2199803C2 |

