Изобретение относится к космическим аппаратам, а именно к микроспутникам - космическим аппаратам массой от 20 до 100 кг.
Развитие космической техники характеризуется созданием большого количества микроспутников. На раннем этапе развития космической техники конструктивно микроспутники (а также практически все остальные космические аппараты) создавались с использованием герметичного гермоконтейнера для размещения в нем приборов служебной и целевой аппаратуры. Наличие гермоконтейнера увеличивает массу конструкции микроспутника и является недостатком.
Примером этому является микроспутник, содержащий корпус приборного отсека, в котором размещены электронные приборы служебной и целевой аппаратуры, а также расположенный вокруг приборного отсека коническо-цилиндрический каркас со смонтированными на нем фотоэлементами солнечной батареи и датчиковой аппаратурой (см. книгу «Спутники для научных исследований околоземного космического пространства» (Обзор зарубежной печати) под редакцией Г.А. Скуридина, М., изд. Машиностроение», 1971 г., стр. 18, рис.6 - Компоновка оборудования в спутнике «Эксплорер VII»).
Одним из основных преимуществ микроспутников является то, что их запуск на орбиту функционирования возможен групповым или попутным способом. С другой стороны, особенностью запуска микроспутника групповым или попутным способом является то, что в условиях ограниченных энергетических возможностей используемой ракеты-носителя, а также ограничений по полезной зоне головного аэродинамического обтекателя для размещения микроспутника к нему предъявляются повышенные требования по снижению его габаритов и пассивной массы конструкции.
Особенностью современных микроспутников является то, что электронные приборы для своего размещения не требуют герметичного контейнера (корпуса), поскольку могут функционировать в условиях «открытого» космического пространства.
В реальных условиях микроспутники создаются двумя путями:
- новая разработка микроспутника;
- разработка микроспутника на базе существующего микроспутника (снятого, например, с эксплуатации).
При новой разработке микроспутника при его компоновке используются все достижения современной электроники и микроспутник разрабатывается на бесконтейнерной основе. Проблемы возникают при компоновке бортовой аппаратуры микроспутника, основу которого составляет существующий микроспутник с гермоконтейнером.
Примером разработки микроспутника на базе существующего микроспутника является микроспутник «Можаец». (см. журнал «Новости космонавтики», 2003 г., №1, стр. 54-55). Данный микроспутник взят за прототип.
Микроспутник содержит цилиндрический термоконтейнер, коническо-цилиндрической формы солнечную батарею, размещенную в гермоконтейнере целевую и служебную электронную аппаратуру и рамочный антенный блок в виде расположенных на торце микроспутника диаметрально противоположно изогнутых антенн, свободные концы которых направлены друг к другу и закреплены на гравитационном устройстве.
К служебной аппаратуре относится аппаратура: бортового комплекса управления, системы ориентации и стабилизации, системы электропитания, системы обеспечения тепловых режимов. Как правило, при создании нового микроспутника данные системы создаются на базе последних достижений микроэлектронной техники и способны работать в условиях «открытого» космического пространства.
Отличительной особенностью микроспутника «Можаец» является то, что в гермоконтейнере расположена как современная аппаратура, способная работать в условиях «открытого» космического пространства, так и некоторая целевая аппаратура, заимствованная с существующего микроспутника и работающая только в герметичном объеме - гермоконтейнере. Снаружи гермоконтейнера расположена датчиковая электронная аппаратура.
К заимствованным приборам, системам микроспутника и элементам конструкции микроспутника «Можаец» относятся пассивная система обеспечения теплового режима в виде теплоизоляции, радиационных поверхностей, расположенных на каркасе солнечной батареи, гермоконтейнер, солнечная батарея, приборная рама (которая затем дорабатывается).
Такое размещение аппаратуры на микроспутнике-прототипе вполне оправдано, поскольку при создании нового микроспутника максимально используются конструктивные возможности гермоконтейнера существующего микроспутника.
Необходимо отметить, что при разработке научно-исследовательского микроспутника в состав бортовой целевой и служебной аппаратуры входят различного вида приборы, датчики и устройства. При этом датчики могут представлять собой довольно габаритные приборы. К таким датчикам и устройствам могут относиться блоки микросхем с разной степенью защиты для исследования работоспособности микросхем в условиях космического пространства, датчики приема различного вида излучения с наземных источников, блоки оптических датчиков в виде призменных уголковых отражателей, солнечные датчики, магнитометры, электромагнитные устройства, гравитационная штанга и др.
При большом составе бортовой аппаратуры при ее компоновке на микроспутнике с использованием заимствованных с существующего микроспутника гермоконтейнера, приборной рамы, каркаса солнечной батареи возникает ряд задач: обеспечение теплового режима аппаратуры, снижение пассивной массы конструкции, адаптация микроспутника к ракетоносителя и к системе отделения (которая также заимствуется) при его групповом запуске в условиях ограниченного объема, отведенного под микроспутник в головном блоке, повышение надежности функционирования бортовой аппаратуры.
Произвольная компоновка аппаратуры внутри и снаружи гермоконтейнера приводит к изменению конструкции микроспутника, к увеличению массы его конструкции, увеличению габаритов, снижению надежности и в целом является недостатком. Кроме того, электрическая связь аппаратуры, расположенной внутри гермоконтейнера и снаружи, осуществляется через проходные герморазъемы, расположенные в нижнем днище гермоконтейнера. Их количество увеличивать не представляется возможным для заимствованного гермоконтейнера и это обстоятельство является граничным условием при компоновке бортовой аппаратуры в условиях ограничений на общую массу микроспутника.
Целью заявляемого технического решения является снижение габаритов и массы конструкции микроспутника, повышение надежности его функционирования.
Поставленная цель достигается тем, что часть бортовой аппаратуры, совместно с датчиковой аппаратурой составляющая одну из систем микроспутника и работающая в условиях «открытого» космического пространства, размещена на внутренней поверхности каркаса солнечной батареи и закреплена на радиационной поверхности каркаса, при этом количество оставшейся данной бортовой аппаратуры, размещенной в гермоконтейнере, определено из условия сохранения теплового режима всей аппаратуры, размещенной в гермоконтейнере, а датчиковая научная и служебная аппаратура смонтирована на торцах гермоконтейнера при помощи плат, причем солнечные датчики установлены на торце гермоконтейнера, стыкуемого с системой отделения микроспутника, а датчиковая аппаратура для работы с наземными станциями и датчиковая научная аппаратура размещены на другом торце гермоконтейнера и установлены на плате в виде прямоугольной плиты и прикрепленного к ней параллелепипеда, состыкованного с рамой, смонтированной на торце гермоконтейнера, при этом научная датчиковая аппаратура установлена на боковых гранях параллелепипеда, а на противоположной поверхности прямоугольной плиты установлена датчиковая аппаратура для работы с наземными станциями и выдвижная штанга гравитационного устройства, на оконечном грузе которой смонтированы оптические датчики, при этом рамочный антенный блок выполнен в виде четырех Г-образных антенн, свободные концы которых расположены параллельно граням прямоугольной плиты, закреплены на ней и ориентированы в одном окружном направлении.
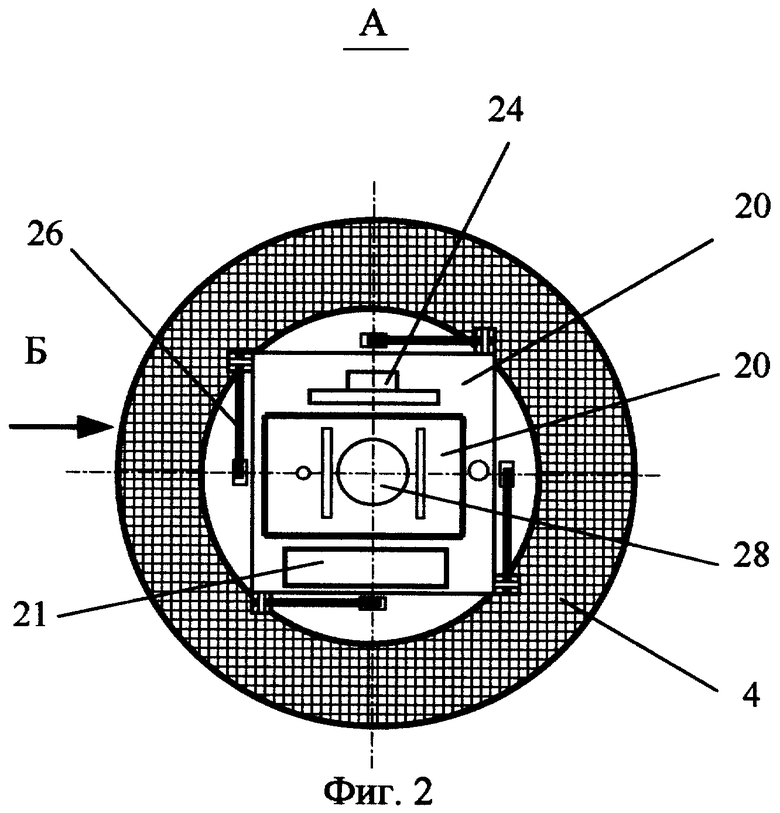
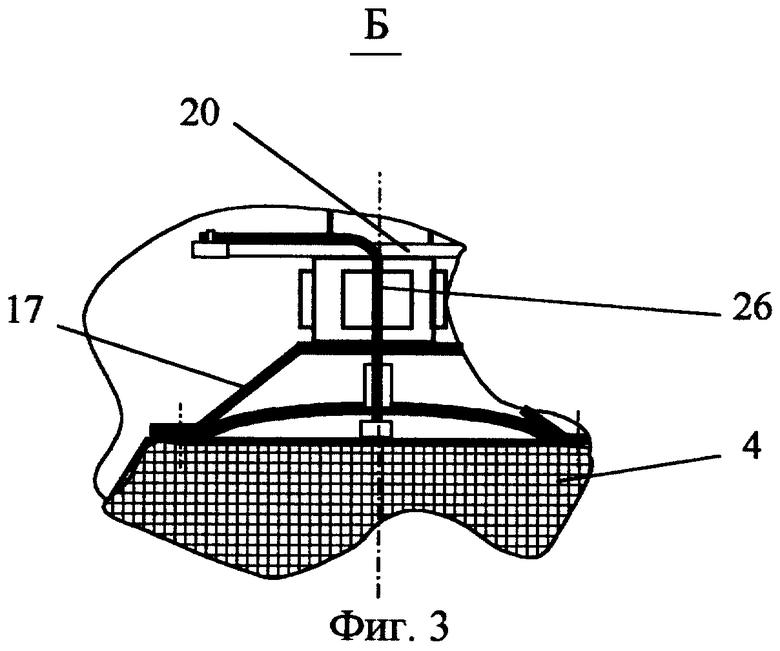
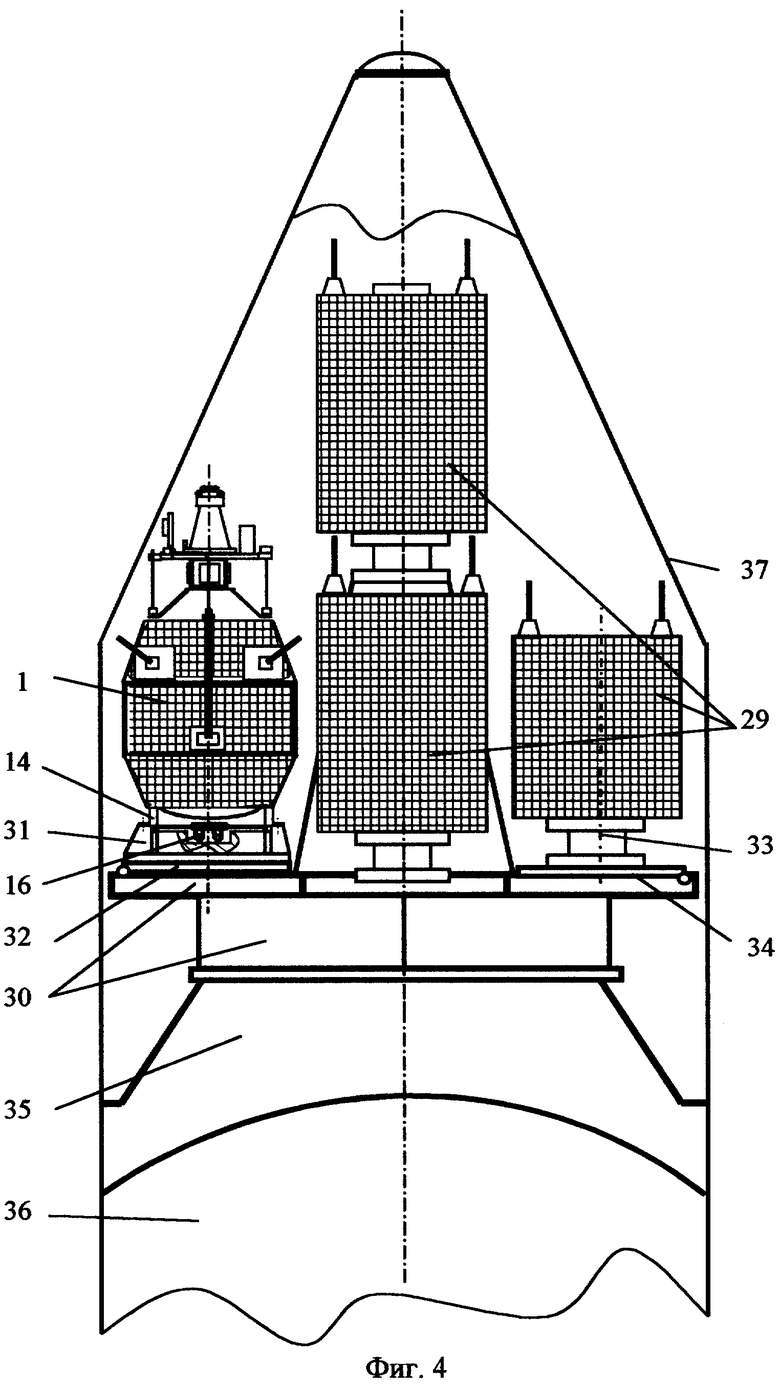
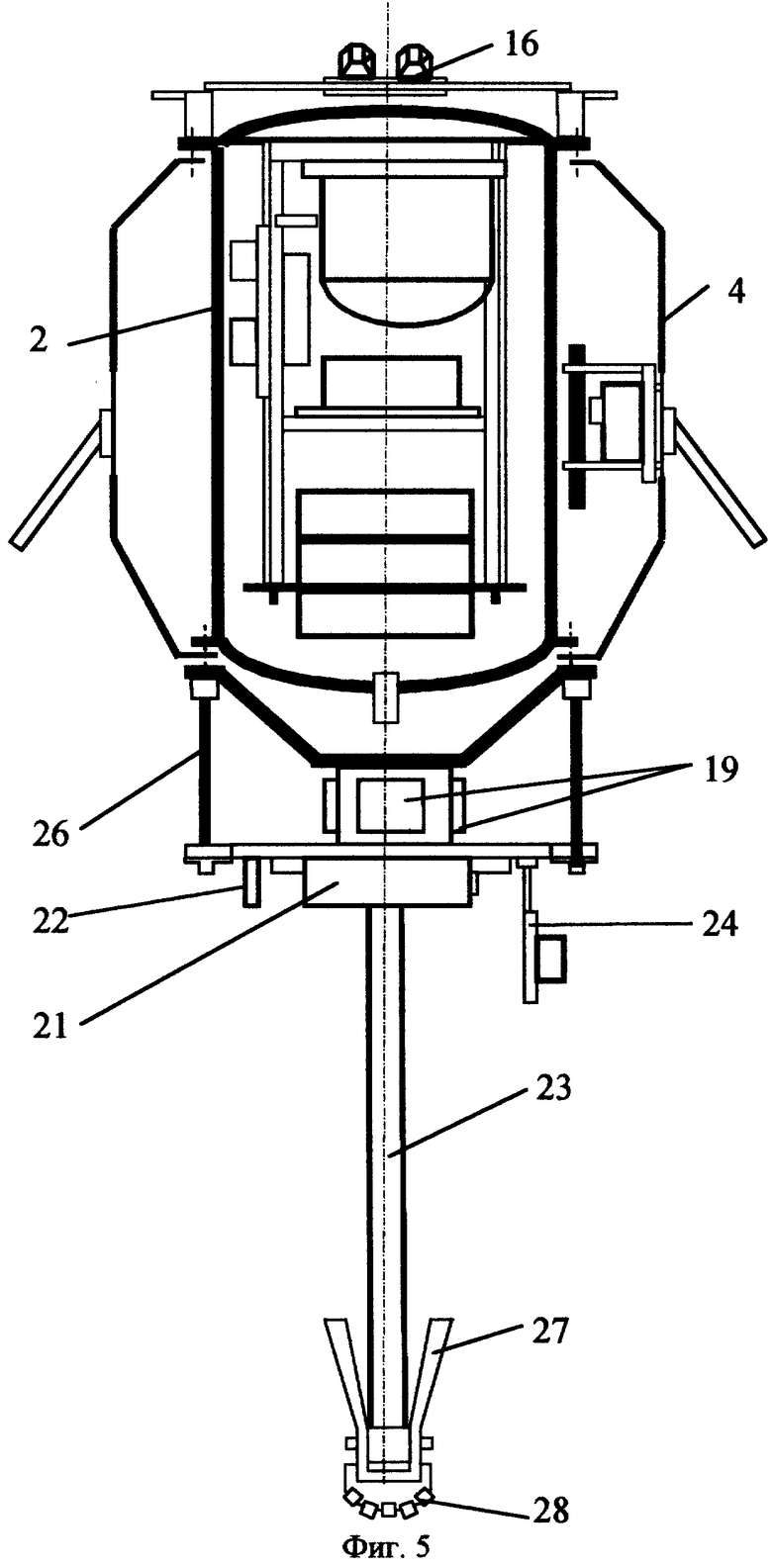
Заявляемый микроспутник поясняется чертежами, где на фиг.1 приведен общий вид микроспутника, на фиг.2 - вид на торец микроспутника со стороны установки гравитационного устройства, на фиг.3 - вид на антенну, установленную на торце микроспутника, на фиг.4 - микроспутник с системой отделения в составе адаптера для группового запуска микроспутников, на фиг.5 - микроспутник в рабочем состоянии с выдвинутой штангой гравитационного устройства.
Микроспутник 1 разработан с использованием элементов существующего микроспутника, основу которого составляет гермоконтейнер 2 цилиндрической формы со сферическими днищами, внутри которого закреплена приборная рама 3. Вокруг гермоконтейнера на его торцевых шпангоутах закреплен каркас 4 коническо-цилиндрической формы, на поверхности которого расположены фотоэлементы солнечной батареи (не показаны) и радиационные поверхности 5.
На приборной раме 3 в верхней ее части расположена аппаратура 6 бортового комплекса управления в виде трех блоков: приемник-передатчик, блок микроконтроллеров, блок аппаратуры спутниковой навигации. На приборной раме также смонтирована аккумуляторная батарея 7 из двух блоков и целевая аппаратура 8, 9. Аппаратура 6, 7, 8, 9 разработана на современных комплектующих и способна работать в условиях «открытого» космического пространства. Кроме того, в гермоконтейнере 1 на приборной раме 3 смонтирована целевая аппаратура 10, заимствованная с существующего микроспутника и работающая только в условиях герметичного объема гермоконтейнера 2.
Блок 11 управления системой ориентации и стабилизации закреплен на внутренней поверхности каркаса 4 солнечной батареи на радиационной поверхности 5. На блоке 11 смонтирован электронный блок 12 магнитометра. Там же установлены два из шести электромагнитных устройств 13. Остальные электромагнитные устройства (не показаны) установлены аналогично с соответствующей ориентацией относительно осей микроспутника.
На одном из торцов гермоконтейнера 2 смонтированы кронштейны 14 для стыковки микроспутника с системой отделения, на которых установлена плата 15 с солнечными датчиками 16.
На другом торце гермоконтейнера смонтирована рама 17, предназначенная для установки платы для монтажа научной и служебной датчиковой аппаратуры. Плата выполнена из кронштейна 18 в виде параллелепипеда, на боковых гранях которого установлены датчики 19 и плиты прямоугольной формы 20. Кронштейн 18 установлен на раму 17, а на его торец прикреплена плита 20. Научные датчики 19 представляют собой микросхемы с разной конструктивной степенью защиты для изучения воздействия космического пространства на их функционирование. Блок согласования, обрабатывающий показания датчиков 19, в виде прибора 8 расположен в гермоконтейнере 2.
На плите 20 смонтированы датчик-приемник 21, работающий с наземными станциями и требующий ориентации на Землю, магнитометр 22, штанга 23 гравитационного устройства, антенна 24 для связи со спутниковой навигационной системой.
Блок обработки информации с датчика-приемника 21 в виде аппаратуры 9 расположен в гермоконтейнере 2. Четыре передающие антенны и две приемные штыревые антенны 25 бортового комплекса управления 6 расположены на каркасе 4. Диаметрально расположенные Г-образные антенны 26 аппаратуры 10 закреплены на торце гермоконтейнера 2, при этом свободные концы Г-образных антенн расположены параллельно граням прямоугольной плиты 20, закреплены на ней и ориентированы в одном окружном направлении. Такое расположение антенн 26 максимально освобождают зону на плите 20 для монтажа датчиковой аппаратуры, гравитационной штанги 23 и антенны 24.
На оконечном выдвигающемся грузе 27 штанги 23 гравитационного устройства смонтирован блок оптических призменных уголковых отражателей 28.
Блок 11 управления системой ориентации и стабилизации, электронный блок 1:2 магнитометра, электромагнитные устройства 13, магнитометр 22, штанга гравитационного устройства 23 составляют магнитно-гравитационную систему ориентации и стабилизации микроспутника и связаны через проходные электромагнитные устройства гермоконтейнера только с аккумуляторными электрическими батареями.
Микроспутник 1 на орбиту функционирования выводится групповым запуском месте с другими микроспутниками 29 в составе адаптера 30.
Микроспутник устанавливается на систему отделения 31, которая крепится на поворотной платформе 32 адаптера 30. Поворотная платформа обеспечивает разворот микроспутника на безопасный угол отделения. При установке микроспутника солнечные датчики 16 занимают свободное место в системе отделения и в силу малых своих габаритов не требуют доработок системы отделения, увеличения ее габаритов и соответственно массы.
Если датчиковую аппаратуру 21, 28, однозначно требующую ориентации на Землю, поместить на торце гермоконтейнера, стыкуемого с системой отделения, то такое расположение приведет к необходимости доработок либо системы отделения, либо увеличения габаритов за массы микроспутника, так как датчики 21, 28 обладают значительными габаритами. При этом гравитационное устройство все равно необходимо монтировать на противоположном торце гермоконтейнера из-за своих габаритов, так же как и датчики 19. Поэтому только размещение солнечных датчиков 16 в зоне стыковки с системой отделения обеспечивает минимальные габариты и массу микроспутника. Микроспутники 29 устанавливаются на адаптер также посредством систем отделения 33, а один из них монтируется на поворотной платформе 34 для обеспечения безударного отделения.
Адаптер 30 устанавливается на раму приборного отсека 35 второй ступени ракеты-носителя 36.
Процесс отделения микроспутника и его функционирование осуществляется следующим образом.
После отделения микроспутников 29 от адаптера платформа 32 вместе с установленным на нее микроспутником 1 поворачивается на угол, обеспечивающий безударное отделение микроспутника, и он отделяется системой отделения 31. После успокоения микроспутника путем гашения полученной при отделении угловой скорости за счет взаимодействия электромагнитных устройств 13 с магнитным полем Земли происходит выдвижение гравитационной штанги 23, выполненной в виде упругой ленты, которая при ее выдвижении за счет упругих сил сворачивается в трубчатый элемент. Вместе с выдвижением штанги 23 происходит выдвижение оконечного груза 27 с установленным на него блоком оптических призменных уголковых отражателей 28. Гравитационная ориентация микроспутника 1 осуществляется таким образом, что штанга 23 ориентируется на Землю. При этом датчики 21, 28 также ориентированы на Землю. При этом блок оптических призменных уголковых отражателей 28 находится на расстоянии от микроспутника, определяемом длиной гравитационной штанги 23. Поскольку микроспутник обладает собственной внешней газопылевой атмосферой, отрицательно влияющей на функционирование оптических систем, то выдвижение блока оптических призменных уголковых отражателей 28 от поверхности микроспутника создает благоприятные условия функционирования для уголковых отражателей и повышает надежность их работы по приему наземного излучения. Кроме того, выдвижение оконечного груза 27 и блока отражателей 28 от датчика-приемника 21 исключает его затенение, что также повышает надежность его работы по приему наземного излучения.
Солнечные датчики 16 при ориентации гравитационной штанги 23 на Землю будут ориентированы на Солнце, что обеспечит их штатное функционирование.
Тепловой режим аппаратуры обеспечивается следующим образом.
Как показывает опыт эксплуатации микроспутника-прототипа (микроспутник «Можаец») и анализ поступающей телеметрической информации с температурных датчиков основной задачей является поддержание плюсовой температуры внутри гермоконтейнера. Естественный путь решения данной задачи заключается в том, что на корпуса приборов устанавливаются электронагреватели. Но в этом случае появляется дополнительная нагрузка с точки управления на бортовой комплекс управления 6, снижаются показатели надежности работы аппаратуры и увеличивается масса микроспутника. Предлагаемый для заявляемого микроспутника путь решения вопросов обеспечения теплового режима заключается в том, что выделяемое вновь устанавливаемой внутри гермоконтейнера аппаратурой 6, 7, 8, 9 тепло с учетом выделяемого тепла аппаратуры 10, с одной стороны, обеспечивало бы необходимый положительный баланс плюсовой температуры при заданной циклограмме ее включения, а, с другой стороны, осуществлялся бы сброс излишнего тепла из гермоконтейнера при включении всей аппаратуры (если такой режим включения аппаратуры возможен). Если тепловой баланс аппаратуры не полностью обеспечивается или его необходимо увеличить для отдельной аппаратуры, то возможна постановка минимального количества электронагревателей или изменение циклограммы включения бортовой аппаратуры.
Тепловой режим аппаратуры, расположенной снаружи гермоконтейнера, а также и гермоконтейнера дополнительно обеспечивается установкой теплоизоляции (не показано). Теплоизоляция смонтирована на нижнем торце гермоконтейнера, стыкуемого с системой отделения 31, вокруг рамы 17 на датчиках 19. Сброс тепла с аппаратуры 11, 12, 13 обеспечивается радиационными поверхностями 5 каркаса солнечных батарей. Сброс тепла с остальной датчиковой аппаратуры обеспечивается через собственные радиационные поверхности.
Заявляемый микроспутник при общей массе 59 кг обеспечивает
1) снижение массы микроспутника на 10-12% за счет
- компактной компоновки микроспутника в зоне стыковки с системой отделения путем расположения в ней только малогабаритных солнечных датчиков;
- расположения всей датчиковой аппаратуры, в том числе требующей ориентации на Землю, на противоположном по отношению к системе отделения торце гермоконтейнера, монтаже там же гравитационной штанги и ориентации штанги после ее выдвижения на Землю;
- увеличения зоны на плите 20 для монтажа датчиковой аппаратуры, гравитационной штанги 23 и антенны 24 за счет ориентации свободных концов диаметрально расположенных Г-образных антенн 26 параллельно граням прямоугольной плиты 20, закрепления на ней и ориентирования в одном окружном направлении;
- сокращения бортовой кабельной сети и количества проходных электрических разъемов через гермоконтейнер путем размещения части бортовой аппаратуры, совместно с датчиковой аппаратурой составляющей одну из систем микроспутника и работающей в условиях «открытого» космического пространства, на внутренней поверхности каркаса солнечной батареи;
- исключения доработок пассивной системы обеспечения теплового режима существующего микроспутника, на базе которого разработан заявляемый микроспутник, путем выбора количества вновь установленной бортовой аппаратуры в гермоконтейнере, из условия сохранения теплового режима всей аппаратуры, размещенной в гермоконтейнере, а также путем монтажа электронной аппаратуры на каркасе солнечной батареи на его радиационной поверхности;
2) повышение надежности функционирования микроспутника за счет
- исключения (или минимизации) количества элементов активной системы обеспечения теплового режима в виде электронагревателей;
- увеличения зоны приема наземного источника излучения для датчика-приемника 21 путем выдвижения оконечного груза 27 гравитационной штанги 23 с блоком оптических призменных уголковых ортажателей 28;
- снижения влияния газопылевой атмосферы микроспутника на функционирование блока оптических призменных уголковых ортажателей 28 путем его расположения на выдвигаемом оконечном грузе 27 гравитационной штанги 23;
- сокращение длины микроспутника на (14-15)% за счет расположения крупногабаритной аппаратуры и устройств (датчик-приемник 21, штанга гравитационного устройства 23, блок датчиков 19, магнитометр 22, антенны 24, 26) с одной стороны гермоконтейнера 2, что позволило максимально плотно закомпоновать микроспутник в зоне стыковки с системой отделения 31.
Заявляемый микроспутник прошел все виды наземной экспериментальной отработки, подтвердившей его эффективность.
| название | год | авторы | номер документа |
|---|---|---|---|
| МИКРОСПУТНИК ДЛЯ ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ ПОВЕРХНОСТИ ЗЕМЛИ | 2010 |
|
RU2457157C1 |
| СТУПЕНЬ РАКЕТЫ-НОСИТЕЛЯ ДЛЯ ЛЕТНО-КОНСТРУКТОРСКИХ ИСПЫТАНИЙ | 2002 |
|
RU2242410C2 |
| Космический аппарат дистанционного зондирования Земли микрокласса | 2017 |
|
RU2651309C1 |
| КОСМИЧЕСКАЯ ПЛАТФОРМА | 2016 |
|
RU2648520C2 |
| МИКРОСПУТНИК | 2014 |
|
RU2572365C1 |
| СЛУЖЕБНЫЙ БЛОК КОСМИЧЕСКОЙ ПЛАТФОРМЫ | 2024 |
|
RU2831970C1 |
| КОСМИЧЕСКАЯ ПЛАТФОРМА | 2016 |
|
RU2688630C2 |
| МЕЖДУНАРОДНАЯ АЭРОКОСМИЧЕСКАЯ АВТОМАТИЗИРОВАННАЯ СИСТЕМА МОНИТОРИНГА ГЛОБАЛЬНЫХ ГЕОФИЗИЧЕСКИХ ЯВЛЕНИЙ И ПРОГНОЗИРОВАНИЯ ПРИРОДНЫХ И ТЕХНОГЕННЫХ КАТАСТРОФ (МАКАСМ) | 2007 |
|
RU2349513C2 |
| КОСМИЧЕСКАЯ ПЛАТФОРМА | 2014 |
|
RU2569658C2 |
| КОСМИЧЕСКАЯ ПЛАТФОРМА | 2008 |
|
RU2376212C1 |
Изобретение относится к ракетно-космической технике и может быть использовано при разработке новых и модернизации существующих искусственных спутников массой от 20 до 100 кг. В предлагаемом спутнике часть бортовой, в том числе датчиковой аппаратуры закреплена на радиационной поверхности с внутренней стороны каркаса солнечной батареи. Оставшаяся часть данной аппаратуры размещена в гермоконтейнере, причем ее количество определено из условия сохранения теплового режима всей аппаратуры в гермоконтейнере. Солнечные датчики установлены на торце гермоконтейнера, стыкуемом с системой отделения микроспутника. Датчики для работы с наземными станциями и датчики научной аппаратуры размещены на другом торце гермоконтейнера. Они установлены на прямоугольной плите с прикрепленным к ней кронштейном в форме параллелепипеда. На боковых гранях последнего установлена научная датчиковая аппаратура. На противоположной поверхности плиты установлены датчики для работы с наземными станциями и выдвижная гравитационная штанга. На концевом грузе штанги смонтированы оптические датчики. Параллельно граням плиты расположены четыре Г-обраэных антенны. Технический результат изобретения состоит в снижении массы спутника (на 10-12%), сокращении его длины (на 14-15%) и повышении надежности функционирования. 5 ил.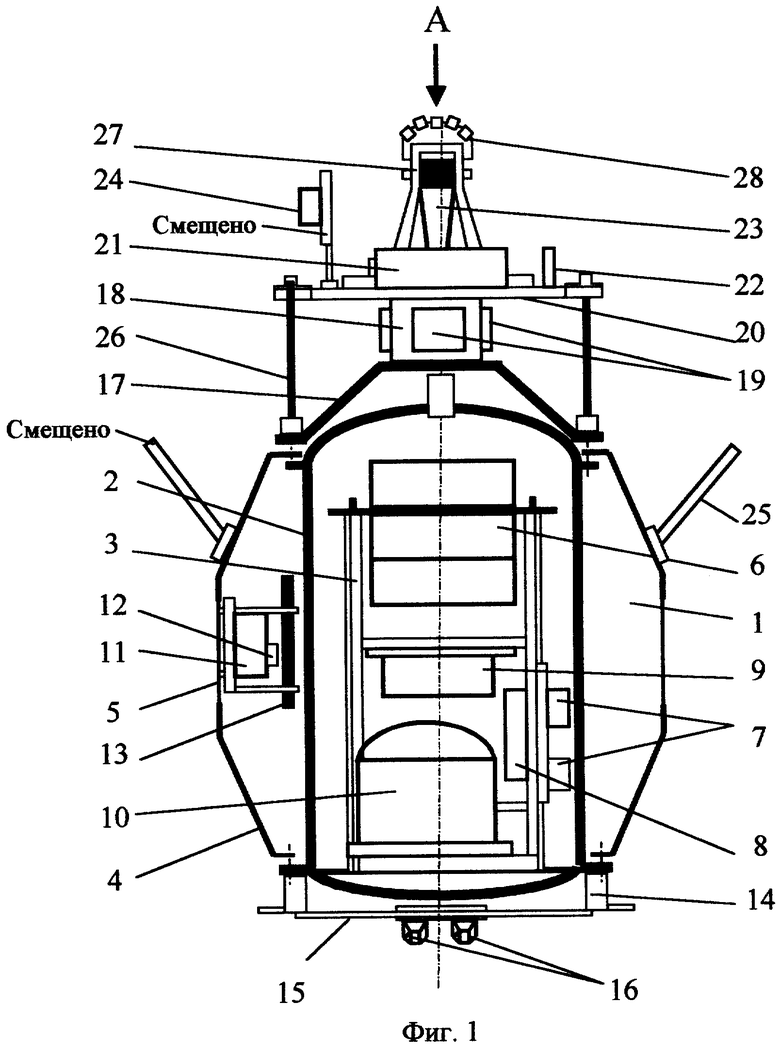
Микроспутник, содержащий гермоконтейнер с размещенной в нем бортовой аппаратурой, работающей в условиях герметичного объема, и аппаратурой, работающей как в условиях герметичного объема, так и в условиях открытого космического пространства, размещенную вокруг гермоконтейнера солнечную батарею в виде коническо-цилиндрического каркаса с фотоэлементами, на поверхности которого установлены радиационные поверхности, датчиковую аппаратуру, смонтированную вне гермоконтейнера, и рамочный антенный блок в виде четырех антенн, смонтированных диаметрально противоположно на торце гермоконтейнера, отличающийся тем, что часть бортовой аппаратуры совместно с датчиковой аппаратурой, составляющая одну из систем микроспутника и работающая в условиях открытого космического пространства, размещена на внутренней поверхности каркаса солнечной батареи и закреплена на радиационной поверхности каркаса, при этом оставшаяся часть данной бортовой аппаратуры размещена в гермоконтейнере, а ее количество определено из условия сохранения теплового режима всей аппаратуры, размещенной в гермоконтейнере, датчиковая научная и служебная аппаратура смонтирована на торцах гермоконтейнера при помощи плат, причем солнечные датчики установлены на торце гермоконтейнера, стыкуемом с системой отделения микроспутника, а датчиковая аппаратура для работы с наземными станциями и датчиковая научная аппаратура размещены на другом торце гермоконтейнера и установлены на плате в виде прямоугольной плиты с прикрепленным к ней кронштейном в форме параллелепипеда, состыкованным с рамой, смонтированной на указанном другом торце гермоконтейнера, причем научная датчиковая аппаратура установлена на боковых гранях параллелепипеда, а на противоположной поверхности прямоугольной плиты установлена датчиковая аппаратура для работы с наземными станциями и выдвижная штанга гравитационного устройства, на оконечном грузе которой смонтированы оптические датчики, при этом антенны указанного рамочного антенного блока выполнены Г-образными, а их свободные концы расположены параллельно граням указанной прямоугольной плиты, закреплены на ней и ориентированы в одном окружном направлении.
| Новости космонавтики | |||
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| US 6543724 А, 08.04.2003 | |||
| УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВКИ И ОТДЕЛЕНИЯ ПОЛЕЗНОЙ НАГРУЗКИ ОТ КОСМИЧЕСКОГО ОБЪЕКТА | 1999 |
|
RU2151086C1 |
| УСОВЕРШЕНСТВОВАНИЕ КОСМИЧЕСКИХ АППАРАТОВ ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ ИЛИ СВЯЗИ | 1997 |
|
RU2199803C2 |

