Предлагаемое изобретение относится к подъемно-транспортному машиностроению, в частности к грейферам, и применяется для погрузки одиночных стволов с кроной.
Известен грейфер (авторское свидетельство СССР №895897, кл. В66С 3/16, 1982 г. - аналог), включающий корпус, внутри которого размещен вертикальный гидроцилиндр, и челюсти, связанные посредством рычажного многозвенника со штоком гидроцилиндра.
Недостатком аналога является низкая производительность из-за невозможности погрузки двух одиночных стволов с кроной за один рабочий цикл.
Известен грейфер (патент на полезную модель РФ №45724 МКИ: В66С 3/16, опубл. 27.05.2005 - прототип), содержащий корпус, внутри которого размещен вертикальный гидроцилиндр, челюсти, связанные посредством рычажного многозвенника со штоком гидроцилиндра, дугообразные элементы, жестко соединенные посредством горизонтальной поперечины с корпусом, причем челюсти имеют по два ряда захватывающих зубьев и шарнирно закреплены на свободных концах дугообразных элементов.
Недостатком данной конструкции грейфера является то, что в процессе смыкания второго ряда захватывающих зубьев, для захвата второго ствола одновременно происходит подъем первого ствола, который перемещается вверх по внутренней поверхности захватывающих зубьев, расположенных в первом ряду челюстей, в результате чего возникают значительные силы сопротивления, приводящие к большим энергозатратам.
Технической задачей изобретения является снижение энергозатрат на подъем одиночного ствола, перемещаемого вверх по внутренней поверхности захватывающих зубьев, расположенных на челюстях в первом ряду.
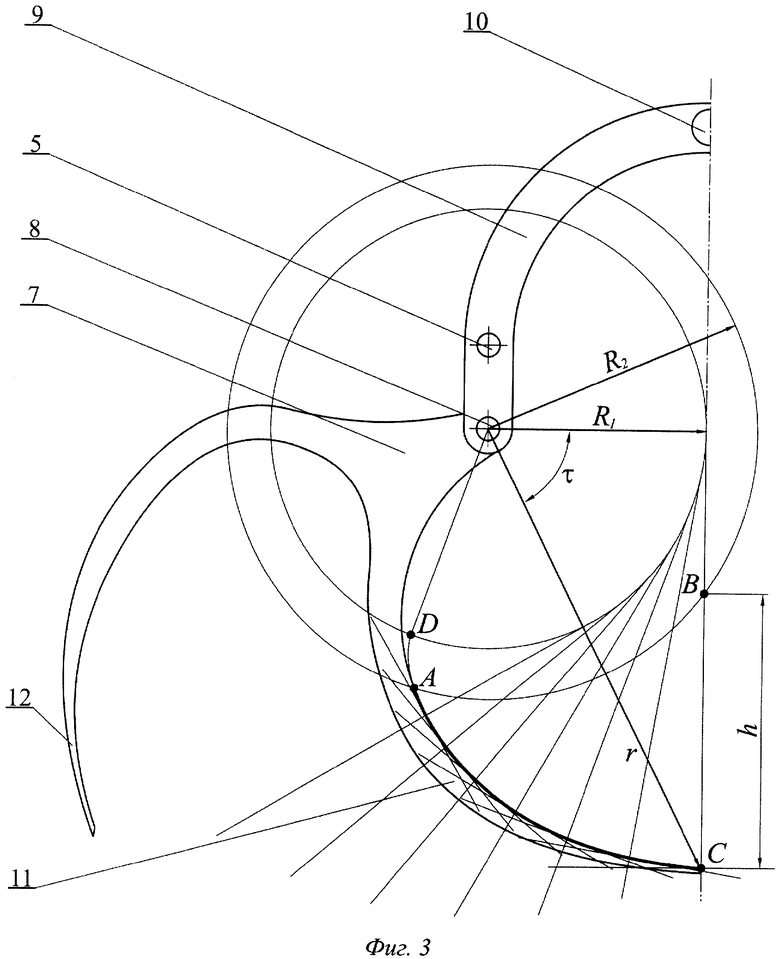
Задача достигается тем, что в грейфере, содержащем корпус, внутри которого размещен вертикальный гидроцилиндр, челюсти, связанные посредством рычажного многозвенника со штоком гидроцилиндра, дугообразные элементы, жестко соединенные посредством горизонтальной поперечины с корпусом, при этом челюсти имеют по два ряда захватывающих зубьев и шарнирно закреплены на свободных концах дугообразных элементов, согласно изобретению у каждого захватывающего зуба, расположенного на челюсти в первом ряду, внутренний профиль в нижней его части, по которой происходит перемещение ствола, выполнен в виде кривой, кривизна которой соответствует участку эвольвенты развертки окружности, радиус эволюты которой равен расстоянию от центра шарнирного крепления челюсти на дугообразном элементе до вертикальной оси симметрии грейфера, причем начальная точка эвольвенты развертки окружности является точкой касания эвольвенты развертки окружности с эволютой, при этом центр эволюты совпадает с центром шарнирного крепления челюсти на дугообразном элементе, кроме того, задача достигается тем, что участок эвольвенты развертки окружности начинается в точке А, расположенной в начале нижней части захватывающих зубьев и являющейся точкой пересечения эвольвенты развертки окружности с окружностью, центр которой совпадает с центром эволюты и радиус которой равен расстоянию от центра эволюты до точки В, расположенной на вертикальной оси симметрии грейфера на высоте h над точкой смыкания захватывающих зубьев, расположенных на челюсти в первом ряду, причем высота h является высотой подъема ствола захватывающими зубьями, расположенными на челюсти в первом ряду, а заканчивается участок эвольвенты развертки окружности в точке С, расположенной на конце захватывающего зуба, кроме того, задача достигается тем, что у каждого захватывающего зуба, расположенного на челюсти в первом ряду, внутренний профиль в верхней его части выполнен в виде дуги, в которую плавно переходит эвольвента развертки окружности в точке А.
Отличия предлагаемого грейфера от прототипа заключается в том, что у каждого захватывающего зуба, расположенного на челюсти в первом ряду, внутренний профиль в нижней его части, по которой происходит перемещение ствола, выполнен в виде кривой, кривизна которой соответствует участку эвольвенты развертки окружности. Благодаря этому при смыкании челюсти для захвата второго ствола первый ствол будет перемещаться вверх по внутренней поверхности данных зубьев с наименьшими энергозатратами.
На фиг.1 представлен общий вид грейфера; на фиг.2 - то же, вид сбоку; на фиг.3 - внутренний профиль захватывающих зубьев, расположенных в первом ряду челюстей; на фиг.4 - грейфер при захвате первого ствола; на фиг.5 - то же, при захвате второго ствола; на фиг.6 - схема сил, действующих на ствол со стороны захватывающих зубьев, расположенных на челюстях в первом ряду и имеющих внутренний профиль нижней части, выполненный в виде кривой, кривизна которой соответствует участку эвольвенты развертки окружности; на фиг.7 - схема сил, действующих на ствол со стороны захватывающих зубьев, расположенных на челюстях в первом ряду и имеющих внутренний профиль нижней части, выполненный в виде кривой, при которой со стороны захватывающих зубьев будут действовать нормальные реакции  , направленные в течение всего процесса подъема ствола вверх под постоянным углом α к вертикальной оси.
, направленные в течение всего процесса подъема ствола вверх под постоянным углом α к вертикальной оси.
Предлагаемый грейфер (фиг.1) содержит шарнирно закрепленный в верхней части корпуса 1 вертикальный гидроцилиндр 2 (фиг.2), шток которого посредством тяг 3, 4 и шарнирно закрепленных на осях 5 рычагов 6 взаимодействует с челюстями 7. Челюсти 7 шарнирно закреплены посредством горизонтальных осей 8 на свободных концах дугообразных элементов 9, жестко зафиксированных по краям горизонтальной поперечины 10, которая жестко соединена с нижней частью корпуса 1. Каждая челюсть 7 имеет два ряда захватывающих зубьев 11 и 12. При этом у каждого захватывающего зуба 11, расположенного на челюсти 7 в первом ряду, внутренний профиль в нижней его части, по которой происходит перемещение ствола, выполнен в виде кривой, кривизна которой соответствует участку эвольвенты развертки окружности АС (фиг.3). Причем радиус эволюты R1 эвольвенты развертки окружности равен расстоянию от центра шарнирного крепления челюсти 7 на дугообразном элементе 9 до вертикальной оси симметрии грейфера. При этом эвольвента развертки окружности имеет начальную точку D, которая является точкой касания эвольвенты развертки окружности с эволютой, а центр эволюты совпадает с центром шарнирного крепления челюсти 7 на дугообразном элементе 9. Радиус-векторы эвольвенты развертки окружности определяются по формуле:

где R1 - радиус эволюты, равный расстоянию от центра шарнирного крепления челюсти 7 на дугообразном элементе 9 до вертикальной оси симметрии грейфера;
τ - угол скольжения.
Начало нижней части захватывающих зубьев 11, расположенных на челюсти 7 в первом ряду, совпадает с точкой А, являющейся начальной точкой участка эвольвенты развертки окружности АС, в виде которого выполнен внутренний профиль нижней части захватывающих зубьев 11. При этом точка А является точкой пересечения эвольвенты развертки окружности с окружностью, центр которой совпадает с центром эволюты и имеющей радиус R2, равный расстоянию от центра эволюты до точки В, расположенной на вертикальной оси симметрии грейфера на высоте h над точкой смыкания захватывающих зубьев 11, расположенных на челюсти 7 в первом ряду, причем высота h является высотой подъема ствола захватывающими зубьями 11. Заканчивается нижняя часть захватывающих зубьев 11 в точке С, расположенной на конце захватывающих зубьев 11, причем точка С является конечной точкой участка эвольвенты развертки окружности АС. Внутренний профиль верхней части захватывающих зубьев 11, расположенных на челюсти 7 в первом ряду, выполнен в виде дуги, в которую плавно переходит эвольвента развертки окружности в точке А.
Грейфер работает следующим образом.
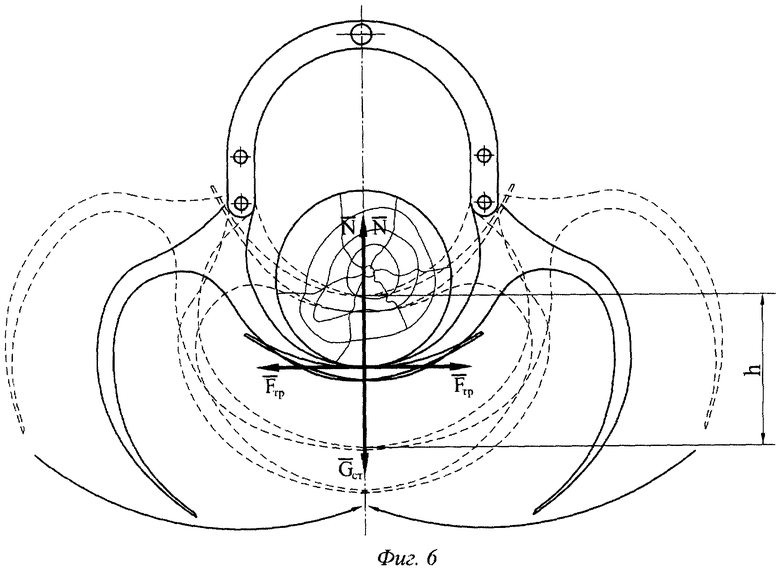
Грейфер с раскрытыми челюстями 7, находящимися в положении I (фиг.2), перемещают к месту расположения ствола с кроной, после чего включается гидроцилиндр 2, при помощи которого происходит вращение челюстей 7. В результате этого захватывающие зубья 11, расположенные на челюстях 7 в первом ряду, переходят из положения I в положение II, захватывая при этом первый ствол (фиг.4). Затем гидроцилиндр 2 переключают в запертое положение, и грейфер подается к месту расположения второго ствола. Далее включается гидроцилиндр 2 и продолжает поворачивать челюсти 7, в результате чего смыкается второй ряд захватывающих зубьев 12 и захватывает второй ствол (положение III), одновременно с этим первый ствол, скользя по внутренней поверхности захватывающих зубьев 11, перемещается в верхнее положение (фиг.5). В процессе перемещения ствола на него со стороны первого ряда захватывающих зубьев 11 каждой челюсти 7 действуют нормальные реакции и силы трения  (фиг.6). При этом благодаря тому, что у захватывающих зубьев 11 внутренний профиль в нижней их части, по которой происходит перемещение ствола, выполнен в виде кривой, кривизна которой соответствует участку эвольвенты развертки окружности АС (фиг.3), нормальные реакции в течение всего процесса перемещения ствола будут направлены по вертикальной оси, а силы трения при этом будут располагаться в горизонтальной плоскости. Следовательно, энергозатраты на подъем ствола в верхнее положение составят:
(фиг.6). При этом благодаря тому, что у захватывающих зубьев 11 внутренний профиль в нижней их части, по которой происходит перемещение ствола, выполнен в виде кривой, кривизна которой соответствует участку эвольвенты развертки окружности АС (фиг.3), нормальные реакции в течение всего процесса перемещения ствола будут направлены по вертикальной оси, а силы трения при этом будут располагаться в горизонтальной плоскости. Следовательно, энергозатраты на подъем ствола в верхнее положение составят:

где N - нормальная реакция, действующая на перемещаемый ствол со стороны первого ряда захватывающих зубьев 11 одной челюсти 7;
h - высота, на которую производится подъем ствола.
При этом согласно схеме, представленной на фиг.6, нормальная реакция, действующая на перемещаемый ствол со стороны первого ряда захватывающих зубьев 11 одной челюсти 7, составит:

где GCT - вес поднимаемого ствола.
Если же у захватывающих зубьев 11 внутренний профиль в нижней их части, по которой происходит перемещение ствола, будет выполнен в виде любой другой кривой, например как показано на фиг.7, то нормальные реакции будут направлены вверх под углом α к вертикальной оси, а возникающие при подъеме ствола силы трения будут направлены вниз под тем же углом α к горизонтальной плоскости. Например, если внутренний профиль нижней части захватывающих зубьев 11, по которой происходит перемещение ствола, будет выполнен в виде кривой, при которой со стороны захватывающих зубьев 11 будут действовать нормальные реакции N, направленные в течение всего процесса подъема ствола вверх под постоянным углом α к вертикальной оси (фиг.7), то энергозатраты необходимые для подъема ствола на высоту h, составят:

Спроецировав силы, действующие на поднимаемый ствол, на ось у (фиг.7), можно записать следующее выражение:

Подставив выражение (5) в формулу (4), получим:

Из выражения (6) следует, что с увеличением угла α энергозатраты на подъем ствола будут расти, а при α=0 ствол будет подниматься вверх с наименьшими энергозатратами.
Таким образом, если внутренний профиль нижней части захватывающих зубьев 11, по которой происходит перемещение ствола, будет выполнен в виде кривой, кривизна которой соответствует участку эвольвенты развертки окружности АС (фиг.3), то ствол будет подниматься вверх с наименьшими энергозатратами, так как нормальные реакции от действия таких зубьев в течение всего процесса перемещения ствола будут направлены вверх по вертикальной оси и, следовательно, угол α=0.
После того как будет осуществлен захват второго ствола с кроной, грейфер перемещается к месту разгрузки. Затем при помощи втягивания штока гидроцилиндра 2 челюсти 7 раскрываются и захваченные грейфером стволы выгружаются.
Предлагаемая конструкция грейфера позволит производить захват двух стволов с кроной за один рабочий цикл с наименьшими энергозатратами, что также будет способствовать улучшению условий работы грейфера. Кроме того, данный грейфер обладает универсальностью, вследствие чего возможно его использование при выполнении погрузки продольных цилиндрических предметов (бревен, труб и т.п.).
| название | год | авторы | номер документа |
|---|---|---|---|
| Центробежная дробилка | 1990 |
|
SU1761265A1 |
| ЗУБЧАТАЯ ПАРА | 1944 |
|
SU67425A1 |
| Инструмент для обработки зубчатых колес методом поверхностной пластической деформации | 1989 |
|
SU1690930A2 |
| УСТРОЙСТВО ДЛЯ ДВУСТОРОННЕЙ ГИБКИ ТРУБЧАТЫХ ЗАГОТОВОК | 2000 |
|
RU2181642C2 |
| Волновая зубчатая передача | 1977 |
|
SU750182A1 |
| Технологический инструмент для периодической прокатки труб | 1977 |
|
SU733749A1 |
| Зубчатая передача | 1987 |
|
SU1471023A1 |
| КОМПЛЕКТ ЛОПАТОК ДЛЯ УЛАВЛИВАНИЯ ТУМАНА И УДАЛЕНИЯ ПЫЛИ | 2016 |
|
RU2698682C1 |
| РОТОР, ВКЛЮЧАЮЩИЙ ПОВЕРХНОСТЬ С ЭВОЛЬВЕНТНЫМ ПРОФИЛЕМ | 2012 |
|
RU2619153C2 |
| Устройство реверсивного поворота и фиксации | 1991 |
|
SU1816618A1 |


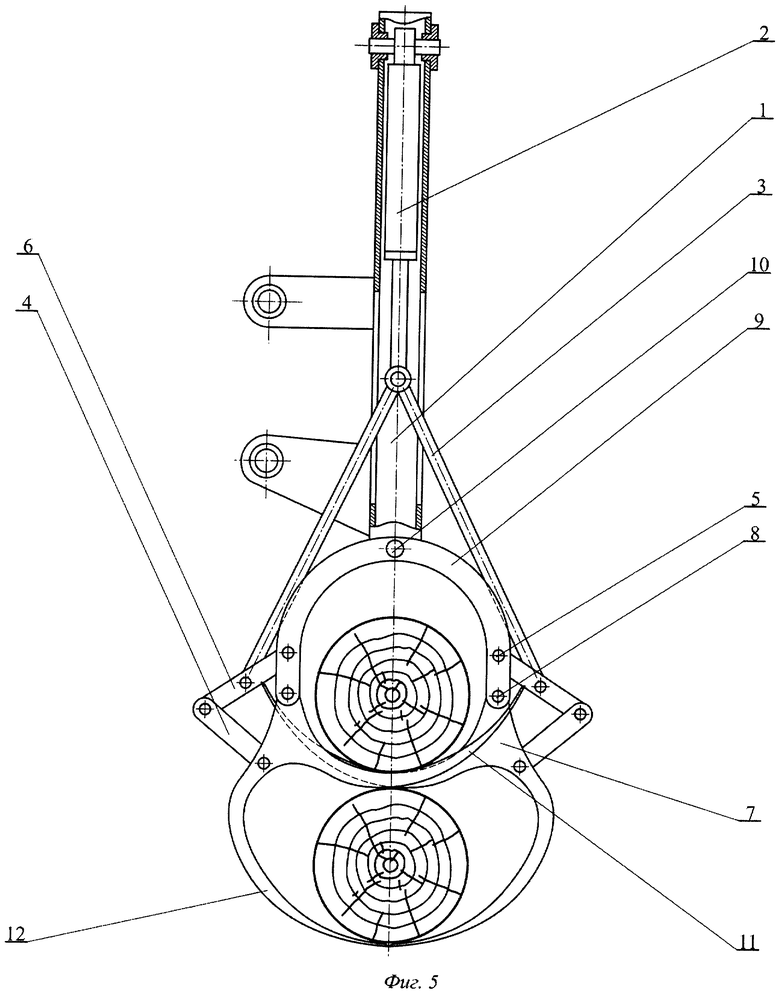

Изобретение относится к подъемно-транспортному машиностроению, в частности к грейферам. Грейфер содержит шарнирно закрепленный в верхней части корпуса (1) вертикальный гидроцилиндр (2), шток которого посредством тяг (3, 4) и шарнирно закрепленных на осях (5) рычагов (6) взаимодействует с челюстями (7). Челюсти (7) шарнирно закреплены посредством горизонтальных осей (8) на свободных концах дугообразных элементов (9), жестко зафиксированных по краям горизонтальной поперечины (10), которая жестко соединена с нижней частью корпуса (1). Каждая челюсть (7) имеет два ряда захватывающих зубьев (11, 12). У каждого захватывающего зуба (11), расположенного на челюсти (7) в первом ряду, внутренний профиль в нижней его части, по которой происходит перемещение ствола, выполнен в виде кривой, кривизна которой соответствует участку эвольвенты развертки окружности АС. Радиус эволюты, эвольвенты развертки окружности равен расстоянию от центра шарнирного крепления челюсти (7) на дугообразном элементе (9) до вертикальной оси симметрии грейфера. Достигается улучшение условий работы грейфера. 2 з.п. ф-лы, 7 ил.
| Устройство для непрерывного изготовления различных стеклянных изделий, как-то пробок, фотолинз и т.п. | 1934 |
|
SU45724A1 |
| Лесозахватывающий грейфер | 1956 |
|
SU109816A1 |
| GB 574004 A, 17.12.1945 | |||
| Захватное устройство В.А.Евсеева | 1988 |
|
SU1618721A1 |

