Изобретение относится к устройствам и системам для оценки состояния поверхности взлетно-посадочных полос аэродромов, но может также использоваться для определения коэффициента сцепления дорожных покрытий.
Известно «Устройство для измерения коэффициента сцепления аэродромного и дорожного покрытий» (Патент RU №2112829, E01C 023/07, G01N 019/02). Известное устройство содержит измерительную тележку с кузовом и установленными на полуосях задающими колесами, а также механическую измерительную систему с измерительным колесом, редуктором, органами нагрузки на измерительное колесо, датчиком силы торможения и вычислительным блоком. В известном устройстве значение коэффициента сцепления (Ксцп.) определяют путем измерения силы сцепления (Рсцп.) измерительного колеса с поверхностью аэродромного покрытия при постоянной его пробуксовке. При этом коэффициент сцепления вычисляют по формуле
Ксцп.=Рсцп./Рг.,
где Ксцп. - коэффициент сцепления измерительного колеса с поверхностью покрытия;
Рсцп. - сила сцепления измерительного колеса при его постоянной пробуксовке;
Рг. - нормальная сила нагрузки на измерительное колесо.
Недостатком известного устройства да и всех других измерительных устройств, реализующих принцип механического подтормаживания, является то, что в силу самого принципа измерительное колесо принуждается к равномерному проскальзыванию по поверхности с постоянным мгновенным значением скольжения, что не соответствует действительному процессу пробуксовки колеса при торможении. Да и используемые тензодатчики - преобразователи силы, имеют низкие показатели точности и надежности.
Другим известным устройством является серийно выпускаемая «Аэродромная тормозная тележка» АТТ-2 («Устройство для определения коэффициента сцепления колес с аэродромным покрытием» - Авторское свидетельство №630982, G01N 19/02. Описание и работа данного устройства приведены также в «Руководстве по эксплуатации гражданских аэродромов Российской Федерации», М. «Воздушный транспорт», 1955 г., стр.154-157).
Известное устройство содержит измерительную тележку и блок регистрации, которые содержат измерительное колесо, блокировочную муфту, редуктор, измерительный элемент, вычислитель, пульт управления, измерительный прибор, раму измерительной тележки, центральную тягу дышла, боковую тягу, направляющую тягу и ведущее колесо.
Определение коэффициента сцепления известным устройством заключается в том, что при движении измерительной тележки из-за разницы в диаметрах ведущего и измерительного колес, соединенных редуктором через блокировочную муфту, осуществляется движение измерительного колеса с пробуксовкой относительно поверхности аэродромного покрытия. Соотношение диаметров ведущего и измерительного колес обеспечивает движение измерительного колеса с пробуксовкой. Вследствие пробуксовки измерительного колеса возникает продольная сила сцепления (Рсцп.). При этом значение коэффициента сцепления вычисляют по формуле
Ксцп.=Рсцп./Рг.,
где Ксцп. - значение коэффициента сцепления;
Рсцп. - продольная сила сцепления измерительного колеса;
Рг. - нормальная сила нагрузки на измерительное колесо.
Недостатком известного способа является наличие значительных ошибок при определении коэффициента сцепления, так как при движении из-за разницы в диаметрах ведомого и измерительного колес имеет место занос измерительной тележки - появляется поперечная сила торможения, а также наличие постоянной пробуксовки снижает продольную силу сцепления.
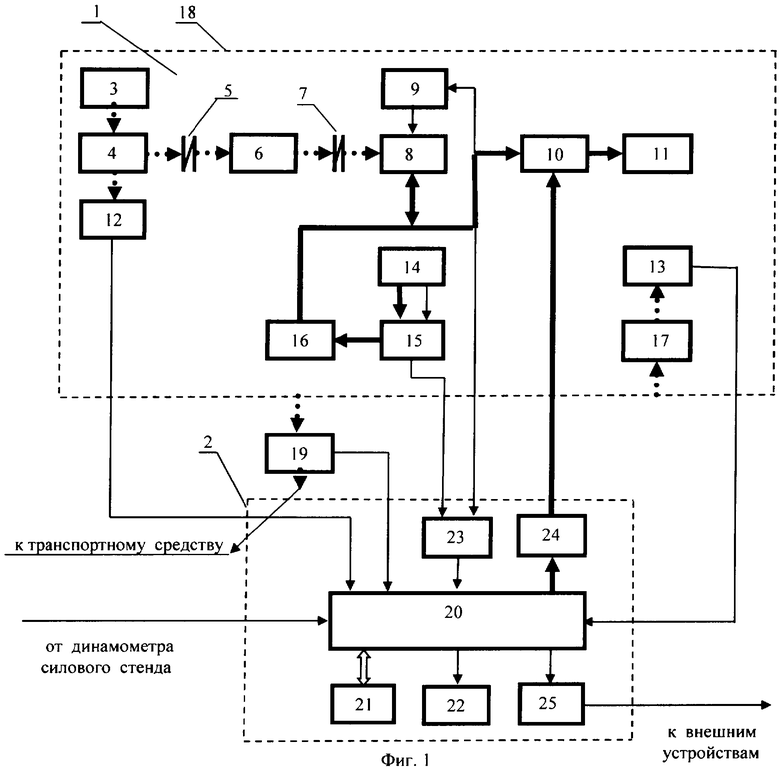
Наиболее близким к заявленному изобретению по технической сущности является «Устройство для определения коэффициента сцепления колеса с аэродромным покрытием» (Заявка Российской Федерации №2004101376/11 (001331) от 08.01.2004 г. - патент №2259669, G01P 15/08), поэтому данное устройство принято за прототип. Структурная схема реализации известного устройства (прототипа) приведена на Фиг.1.
Упомянутое устройство-прототип содержит измерительную тележку 1 и блок регистрации 2.
В состав измерительной тележки 1 входят: независимый вертикальный груз 3, измерительное колесо 4, блокировочная муфта 5, редуктор 6, муфта свободного хода 7, генератор постоянного тока 8, регулятор напряжения 9, блок силовых ключей 10, активная нагрузка 11, первый 12 и второй 13 датчики угловых скоростей, аккумуляторная батарея 14, контактор 15, пусковое сопротивление 16, ведомые колеса 17, рама измерительной тележки 18, измерительный элемент 19.
В состав блока регистрации 2 входят: процессор 20, блок памяти 21, дисплей 22, пульт управления 23, блок управления 24 и контроллер 25.
Работа известного устройства
При изготовлении, а затем с установленной периодичностью проводится тарирование устройства, при этом определяется изменение силы динамического торможения измерительного колеса 4 при изменении активной нагрузки 11. Результаты тарирования вносятся в блок памяти 21, в память процессора 20, а также прилагаются к документации на данное устройство.
Перед проведением работ по измерению коэффициента сцепления проводится подготовительная работа, которая заключается в следующем: включается блокировочная муфта 5, включается режим «измерение», кнопками пульта управления 23 устанавливается предварительная информация, нажимается кнопка «Пуск». Ротор генератора постоянного тока 8 раскручивается до номинальной скорости вращения. После проведения подготовительной работы автомобиль-буксировщик разгоняется до скорости Va, равной скорости измерительного колеса 4 при тарировании устройства на силовом стенде. Скорость движения определяется по скорости вращения ведомого колеса 17.
V=Va; Va=ωr1,
где V - скорость измерительного колеса 4 на силовом стенде, м/с;
Va - скорость автомобиля буксировщика, м/с;
ω - угловая скорость ведомого колеса 17, рад/с;
r1 - радиус ведомого колеса, м.
При равенстве скоростей V и Va включается программа определения максимального продольного сцепления шины измерительного колеса с поверхностью аэродромного покрытия. При этом следует отметить, что при равенстве скоростей вращения выходного вала редуктора 6 и ротора генератора 8 муфта свободного хода подключает редуктор 6 к ротору генератора 8.
Процесс определения максимального коэффициента сцепления (Ксцп.мак.) условно делится на два этапа - поиска и слежения.
В режиме поиска осуществляется поиск максимальной силы сцепления (Рсцп.мак.) измерительного колеса 4 с поверхностью аэродромного покрытия. В режиме слежения - слежение за максимальной силой сцепления, осуществляя при этом необходимую корректировку.
Режим поиска начинается с минимального и равномерного увеличения тока на активной нагрузке блока 11. При этом тяговая сила Рт. динамического торможения измерительного колеса 4 будет также от минимального значения пропорционально увеличиваться. При минимальном токе на активной нагрузке 11, когда сила динамического торможения Рт. меньше силы сцепления Рсцп. измерительного колеса 4 с поверхностью покрытия, пробуксовка измерительного колеса отсутствует. При увеличении нагрузки генератора 8 увеличивается сила динамического торможения, а с появлением пробуксовки измерительного колеса 4 сила динамического торможения Рт. становится равной силе сцепления Рсцп. измерительного колеса с поверхностью покрытия. Однако наибольшей силы сцепления Рсцп.мак. измерительное колесо 4 достигает при его пробуксовке от 10 до 20%. Следовательно, увеличивая ток на активной нагрузке 11, увеличивая пробуксовку измерительного колеса 4, получим максимальное значение его динамического торможения Рт.мак., равное Рсцп.мак. При этом Рт.мак. контролируется по показаниям измерительного элемента 19.
Рт.мак. (Рсцп.мак.)=Ри.-Рк.,
где Рт.мак. - максимальная сила динамического торможения измерительного колеса 4, Н (кг);
Рсцп.мак. - максимальная сила сцепления измерительного колеса 4, Н(кг);
Ри. - сила буксировки измерительной тележки 1, Н(кг);
Рк. - сила сопротивления качению ведомых колес 17, H(кг).
Сила сопротивления качению Рк. ведомых колес определяется на силовом стенде при тарировании устройства или вычисляется по формуле:
Рк.=GГ,
где G - нормальная нагрузка на ось ведомых колес 17, Н(кг);
F - коэффициент сопротивления качению ведомых колес.
На этом режим поиска заканчивается.
В режиме слежения, при увеличении или уменьшении тока активной нагрузки, сохраняется максимальная сила Рт.мак. динамического торможения измерительного колеса 4. Максимальное значение коэффициента сцепления вычисляется в соответствии с формулой
Ксцп.мак.=Рт.мак.(Рсцп.мак.)/Рг.,
где Ксцп.мак.- максимальное значение коэффициента сцепления;
Рг. - нормальная (вертикальная) сила независимого груза 3 на измерительное колесо 4, Н(кг).
Недостатком известного устройства (прототипа) является погрешность в измерении коэффициента сцепления Ксцп.мак., вносимая измерительным элементом 19. На точность показаний измерительного элемента 19 влияют: вибрация движущейся измерительной тележки 1, сопротивление воздуха, встречный ветер увеличивает, а попутный уменьшает показания измерительного элемента 19. При использовании измерительного элемента 19 необходимо учитывать силу сопротивления качению ведомых колес 17, которая в силу разных причин может меняться. И второе - мала разрешающая способность устройства в определении малоразмерных участков поверхности с низким коэффициентом сцепления. Целью предлагаемого устройства является повышение точности измерений коэффициента сцепления Ксцп. колеса с поверхностью покрытия и повышения разрешающей способности по определению малоразмерных участков поверхности с небольшим коэффициентом сцепления (разлитое масло).
Поставленная цель в « Устройстве для определения коэффициента сцепления колеса с поверхностью аэродромного покрытия » достигается тем, что в нем, как и в прототипе, содержатся измерительная тележка и блок регистрации.
Измерительная тележка содержит независимый груз, измерительное колесо, коробку передач, муфту свободного хода, генератор постоянного тока, регулятор напряжения, активную нагрузку, ведомые колеса и раму измерительной тележки. При этом независимый груз нормально соединен с измерительным колесом, коробка передач через муфту свободного хода механически соединена с ротором генератора постоянного тока, силовой выход которого через регулятор напряжения подключен к входу генератора постоянного тока, являющегося входом его обмотки возбуждения. Ведомые колеса соединены с рамой измерительной тележки.
Блок регистрации содержит процессор, блок памяти, дисплей и пульт управления, причем порт входа/выхода процессора подключен к блоку памяти, пульт управления подключен к первому входу процессора, первый выход которого соединен с дисплеем, при этом второй - свободный вход процессора предусмотрен для подключения динамометра силового стенда (при проведении тарирования устройства), а второй его свободный выход предусмотрен для подключения внешних устройств.
Дополнительно в состав измерительной тележки включены первый и второй инкрементные датчики, датчик крутящего момента, ограничитель, электронный ключ и блок формирования импульсов управления. При этом измерительное колесо через датчик крутящих моментов механически соединено с коробкой передач.
Измерительное и одно из ведомых колес механически соответственно соединены с первым и вторым инкрементными датчиками. Силовая шина генератора постоянного тока через активную нагрузку подключена к входу электронного ключа, второй и третий входы которого соединены с первым и вторым выходами блока формирования импульсов управления. Измерительная тележка гибким кабелем соединена с блоком регистрации, при этом первый и второй инкрементные датчики, датчик крутящего момента и ограничитель подключены соответственно к третьему, четвертому, пятому и шестому входам процессора, третий и четвертый выходы которого соединены с первым и вторым входами блока формирования импульсов управления.
Значение коэффициента сцепления (Ксцп.) вычисляется путем измерения силы продольного сцепления (Рсцп.) измерительного колеса с поверхностью покрытия, получаемой при работе генератора постоянного тока в генераторном режиме, когда механическая сила сцепления измерительного колеса в соответствии с заданным значением его пробуксовки превращается в электрическую и выделяется в виде тепловой энергии в блоке активной нагрузки, при этом коэффициент сцепления вычисляется по формуле:
Ксцп.=Рсцп./Рг.,
где Ксцп. - значение коэффициента сцепления;
Рсцп. - продольная сила сцепления измерительного колеса 4 с поверхностью покрытия, Н (кг);
Рг. - нормальная сила нагрузки на измерительное колесо, Н(кг).
В известных технических решениях признаков, сходных с отличительными признаками заявленного устройства, не обнаружено, вследствие чего можно считать, что предлагаемое устройство соответствует изобретательскому уровню.
Использование данного устройства при его реализации позволит повысить безопасность при взлете и посадке летательных аппаратов путем повышения точности определения коэффициента сцепления авиашасси с поверхностью взлетно-посадочной полосы аэродрома.
Сущность предлагаемого «Устройства для определения коэффициента сцепления колеса с поверхностью аэродромного покрытия» поясняется чертежами, где представлены:
на фиг.1 - структурная схема прототипа;
на фиг.2 - структурная схема предлагаемого устройства;
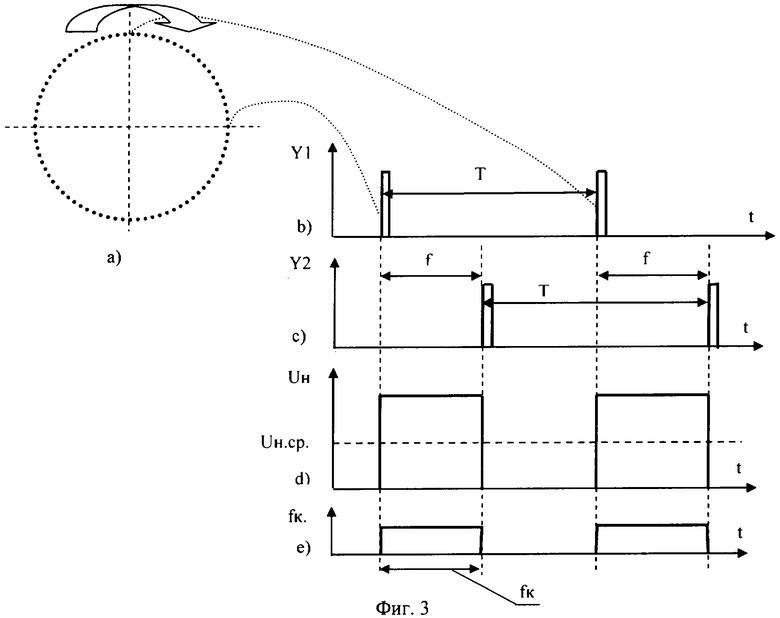
на фиг.3 - диаграмма, поясняющая работу инкрементных 26 и 27 датчиков;
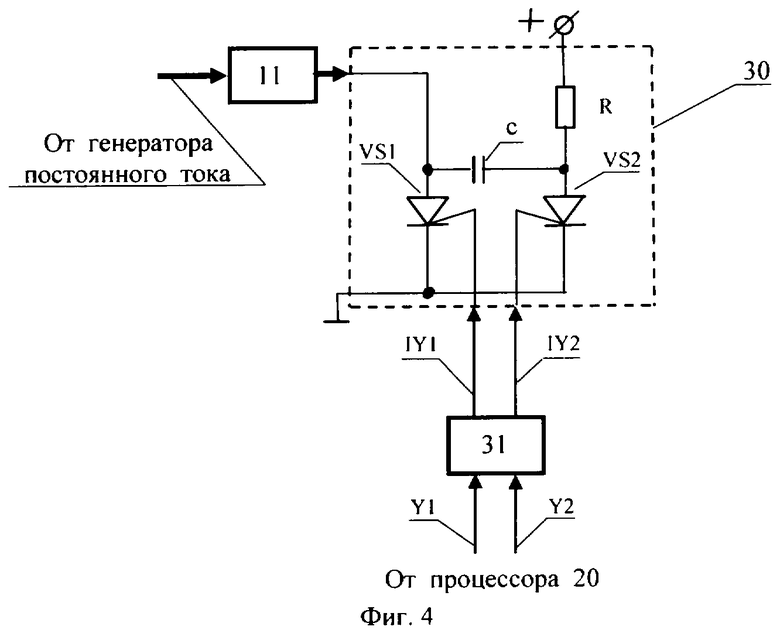
на фиг.4 - схема, поясняющая работу электронного ключа 30;
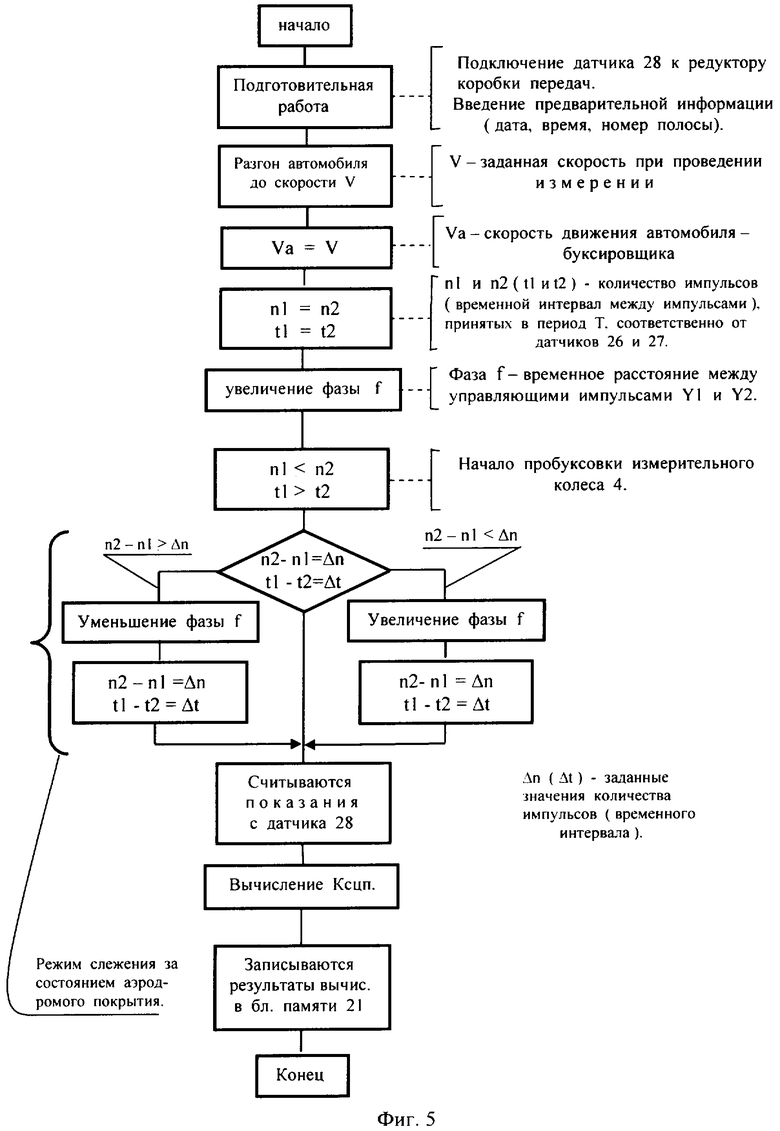
на фиг.5 - алгоритм работы предложенного устройства.
Предлагаемое «Устройство для определения коэффициента сцепления колеса с поверхностью аэродромного покрытия», как и прототип, содержит измерительную тележку 1 и блок регистрации 2. Измерительная тележка 1 содержит независимый груз 3, измерительное колесо 4, коробку передач 6, муфту свободного хода 7, генератор постоянного тока 8, регулятор напряжения 9, активную нагрузку 11, ведомые колеса 17 и раму измерительной тележки 18.
При этом независимый груз 3 нормально соединен с измерительным колесом 4. Коробка передач 6 через муфту свободного хода 7 механически соединена с ротором генератора постоянного тока 8, силовой выход которого через регулятор напряжения 9 подключен к входу генератора постоянного тока 8, являющегося входом его обмотки возбуждения. Ведомые колеса 17 соединены с рамой 18 измерительной тележки 1.
Блок регистрации 2 содержит процессор 20, блок памяти 21, дисплей 22 и пульт управления 23. Причем порт входа/выхода процессора 20 подключен к блоку памяти 21. Пульт управления 23 подключен к первому входу процессора 20, первый выход которого соединен с дисплеем 22. При этом второй - свободный вход процессора 20 предусмотрен для подключения динамометра силового стенда (при проведении тарирования устройства), а второй его свободный выход предусмотрен для подключения внешних устройств.
Дополнительно в состав измерительной тележки 1 включены первый 26 и второй 27 инкрементные датчики, датчик крутящего момента 28, ограничитель 29, электронный ключ 30 и блок формирования импульсов управления 31.
При этом измерительное колесо 4 через датчик крутящего момента 28 механически соединено с коробкой передач 6, измерительное 4 и одно из ведомых колес 17 механически соответственно соединены с первым 26 и вторым 27 инкрементными датчиками. Силовая шина генератора постоянного тока 8 через активную нагрузку 11 подключена к входу электронного ключа 30, второй и третий входы которого соединены с первым и вторым выходами блока формирования импульсов управления 31.
Измерительная тележка 1 гибким кабелем соединена с блоком регистрации 2, при этом первый 26 и второй 27 инкрементные датчики, датчик крутящего момента 28 и ограничитель 29 подключены соответственно к третьему, четвертому, пятому и шестому входам процессора 20, третий и четвертый выходы которого соединены с первым и вторым входами блока формирования импульсов управления 31.
Значение коэффициента сцепления (Ксцп.) вычисляется путем измерения силы продольного сцепления (Рсцп.) измерительного колеса 4 с поверхностью покрытия, получаемой при работе генератора постоянного тока 8 в генераторном режиме, когда механическая сила сцепления измерительного колеса 4 в соответствии с заданным значением его пробуксовки превращается в электрическую и выделяется в виде тепловой энергии в блоке активной нагрузки 11, при этом коэффициент сцепления вычисляется по формуле:
Ксцп.=Рсцп./Рг.,
где Ксцп. - значение коэффициента сцепления;
Рсцп. - продольная сила сцепления измерительного колеса 4 с поверхностью покрытия, Н(кг);
Рг. - нормальная сила нагрузки на измерительное колесо, Н(кг).
Конструктивное исполнение предлагаемого устройства и работа дополнительно введенных блоков
Предлагаемое устройство состоит из измерительной тележки 1 и блока регистрации 2, которые соединены между собой кабелем.
При проведении измерений блок регистрации 2 размещается в кабине водителя.
Блок регистрации 2 содержит процессор 20, блок памяти 21, дисплей 22 и пульт управления 23.
Процессор 20 выполнен на микроконтроллере семейства PIC 18, который выпускается с программируемой памятью программ, оперативным запоминающим устройством, 10-разрядными аналого-цифровыми преобразователями, 16-разрядными таймерами, таймером реального времени и соответствующими портами ввода, вывода информации и портом ввода/вывода.
Процессор 20 в соответствии с программным обеспечением и заданными режимами работы осуществляет прием и обработку полученной информации, управление устройством и выдает результаты измерений во внешние устройства.
Пульт управления 23. Переключателями пульта управления включаются режимы работы устройства «Измерение - Тарирование - Выключено». Устанавливается предварительная информация - дата, время, индекс полосы.
Измерительная тележка 1 снабжена измерительным колесом 4 - авиационное шасси и двумя ведомыми колесами 17 - автомобильное шасси. Ведомые колеса 17 и измерительное колесо 4 расположены симметрично относительно тяги измерительной тележки, чем обеспечивается путевая устойчивость. Независимый груз 3 обеспечивает нормальную (вертикальную) известную силу Рг. давления на измерительное колесо 4.
Коробка передач 6 перед проведением измерений обеспечивает соединение датчика крутящего момента 28 с редуктором коробки передач, а во время проведения измерений редуктор коробки передач 6 обеспечивает требуемый рабочий диапазон скорости вращения ротора генератора постоянного тока 8.
Муфта свободного хода 7 передает вращающий момент в одном направлении - от коробки передач 6 к ротору генератора постоянного тока 8.
Генератор постоянного тока 8 работает в генераторном режиме, генераторный режим генератора обеспечивается силой сцепления Рсцп. измерительного колеса 4 с поверхностью покрытия.
Регулятор напряжения 9 поддерживает напряжение генератора 8 постоянным при изменении тока в блоке активной нагрузки 11.
Активная нагрузка 11 обеспечивает нагрузку генератора 8 от минимальной до его полной мощности.
Датчик крутящего момента 28 измеряет и выдает в процессор 20 значение крутящего момента, действующего на измерительное колесо 4.
Ограничитель 29 выделяет огибающую напряжения блока активной нагрузки 11.
Первый 26 и второй 27 инкрементные датчики обеспечивают измерение скорости, пройденного расстояния и по их информации определяют наличие пробуксовки измерительного колеса 4. Датчики имеют нулевой индекс выхода (N) - импульс нулевой отметки за один оборот, который используется для определения скорости и пройденного расстояния, а также используется для корректировки ошибки в пределах каждого оборота.
Инкрементные датчики 26 и 27 - импульсные оптические устройства, которые формируют импульсы, соответствующие углам поворота измерительного 4 и ведомого 17 колес. Инкрементный датчик состоит из следующих компонентов: источника света, диска с метками (Фиг.3а), фототранзисторной сборки и схемы обработки сигналов. Диск датчика подразделен на точно позиционированные отметки. Количество отметок определяет количество импульсов за один оборот. Диск поделен на 1000 меток, тогда за 250 импульсов ведомое колесо 17 повернется на 90 градусов.
Импульсы инкрементных датчиков поступают на счетные входы процессора 20. В процессоре 20 по импульсам инкрементного датчика 27 ведомого колеса, начиная с нулевой отметки, каждым 250 импульсом формируется управляющий импульс Y1 (IY1) (Фиг.3b). Временной интервал между импульсами Y1 (IY1) равен периоду следования Т. При необходимости временной интервал Т можно менять. В каждом периоде Т количество импульсов, принимаемых от инкрементного датчика 26 равно n1, а от датчика 27 - n2, при этом из импульсов датчика 27 формируется второй управляющий импульс Y2 (IY2), а временное расстояние между импульсами Y1 и Y2 именуется фазой f (фиг.3с). Фаза f может меняться от минимального до максимального значения. Минимальное значение фазы f равно нулю, а максимальное - периоду Т. Временное расстояние между импульсами у датчика 26 равно t1, а у датчика 27 - t2. Заданное минимальное значение пробуксовки измерительного колеса 4 равно Δn (Δt).
Δn=n2-n1 или Δt=t1-t2,
где Δn - заданное количество импульсов;
Δt - заданное время;
n1 и n2 - количество импульсов, принятых соответственно датчиками 26 и 27 за период Т;
t1 и t2 - временной интервал между импульсами соответственно у датчиков 26 и 27.
Информация инкрементных датчиков 26 и 27 принимается процессором 20 и анализируется в соответствии с программным обеспечением, при этом могут быть следующие возможные варианты. (При этом имеется ввиду, что диаметры измерительного и ведомых колес равны.)
1. Пробуксовка измерительного колеса 4 равна заданному минимальному значению, которое определяет начало его пробуксовки, при этом Δn и Δt соответствуют заданным значениям, а n2-n1=Δn; t1-t2=Δt. В данном случае сила тормозного момента Рт. измерительного колеса 4 равна его силе сцепления Рсцп. с поверхностью покрытия. Процессором 20 формируется управляющий импульс Y2, но фаза f сохраняется. Это означает, что в данный момент времени тормозной момент измерительного колеса 4 и показания датчика крутящего момента 28 сохраняются.
2. Пробуксовка измерительного колеса 4 больше заданного значения, при этом n1«n2; t1»t2, а n2-n1>Δn; t1-t2>Δt. Следовательно, сила тормозного момента Рт. измерительного колеса 4 больше его силы сцепления Рсцп. с поверхностью покрытия. Процессором 20 формируется управляющий импульс Y2, но фаза f в каждом периоде Т уменьшается до момента, когда Δn и Δt станут соответствовать заданным значениям. Изменение фазы f уменьшает силу тормозного момента Рт. до силы сцепления Рсцп. с поверхностью покрытия, но в дальнейшем фаза f и сила тормозного момента Рт. сохраняются - при условии, что Δn и Δt будут соответствовать заданным значениям.
3. Пробуксовка измерительного колеса отсутствует, при этом n1=n2, t1=t2, a n2-n1=0, t1-t2=0. В этом случае сила тормозного момента Рт. измерительного колеса 4 меньше, чем сила его сцепления Рсцп. с поверхностью покрытия. Процессором 20 формируется управляющий импульс Y2 и фаза f в каждом периоде Т увеличивается до момента, когда Δn и Δt станут соответствовать заданным значениям. Увеличение фазы f увеличивает силу тормозного момента Рт. измерительного колеса 4. При равенстве сил тормозного момента и сцепления (Рт. и Рсцп.) появляется пробуксовка измерительного колеса, изменение фазы f прекращается.
Управляющие импульсы Y1 и Y2 соответственно с выходов процессора 20 поступают на первый и второй входы блока формирования импульсов 31, где преобразуются в управляющие импульсы IY1 и IY2, в которых ток управления формируется в виде коротких положительных импульсов с большой скоростью нарастания. Управляющие импульсы IY1 и IY2 поступают на входы электронного ключа 30.
Электронный ключ 30 постоянного тока выполнен в соответствии с известной схемой, изображенной на Фиг.4. Электронный ключ 30 содержит основной VS1 и дополнительный VS2 тиристоры, конденсатор С и резистор R. В анодную цепь основного тиристора включена активная нагрузка 11. С приходом управляющего импульса IY1 на управляющий электрод тиристора VS1 тиристор включается. После окончания управляющего импульса IY1 тиристор VS1 остается включенным. Такое состояние тиристора остается устойчивым. Для выключения VS1, то есть для выключения активной нагрузки 11, необходимо приложить к VS1 отрицательное анодное напряжение. Эту роль выполняет конденсатор С, который при включении дополнительной цепи, содержащей тиристор VS2 и резистор R, подключается параллельно основному тиристору VS1. Выключение нагрузки 11 осуществляется управляющими импульсами IY2 (Y2), которые поступают на управляющий электрод тиристора VS2, тиристор включается, и к тиристору VS1 прикладывается обратное анодное напряжение, равное напряжению на конденсаторе С. Через некоторое время, в течении которого на тиристор VS1 будет действовать обратное анодное напряжение, тиристор VS1 выключится. Значение резистора R выбирается таким, чтобы анодный ток тиристора VS2 в установившемся режиме был меньше тока удержания. Тогда после выключения VS1 выключается также и дополнительный тиристор VS2. Схема возвращается в исходное состояние. В данном случае электронный ключ 30 постоянного тока используется в режиме импульсного регулирования среднего значения напряжения Uн.cp.на активной нагрузке 11, осуществляется широтно-импульсное модулирование (Фиг.3d). Для обеспечения импульсного регулирования напряжения на нагрузке 11, а следовательно, и момента торможения измерительного колеса 4 используется режим заданного значения (Δn и Δt) его пробуксовки.
В зависимости от силы сцепления Рсцп. измерительного колеса с поверхностью покрытия, от наличия или отсутствия пробуксовки измерительного колеса 4 и от заданного значения (Δn, Δt) его пробуксовки будет меняться временной сдвиг (фаза f) между управляющими импульсами Y1 и Y2 (Фиг.3с), а изменение фазы f меняет среднее значение напряжения Uн.cp. на нагрузке 11, которое меняет тормозной момент Рт. Среднее значение напряжения Uн.cp. на активной нагрузке 11 определяется выражением:
Uн.cp.=Uн.(f/T),
где Uн.cp. - среднее значение напряжения на активной нагрузке 11;
Uн. - напряжение генератора постоянного тока 8;
F - фаза, временной сдвиг между управляющими импульсами Y1 и Y2;
Т - период следования управляющих импульсов Y1.
Тарирование предлагаемого устройства
Тарирование устройства проводится при его изготовлении, а затем с периодичностью, определяемой инструкцией по эксплуатации на данное устройство. Тарирование устройства осуществляется с целью определения тормозного момента Рт. измерительного колеса 4 при изменении нагрузки на генераторе постоянного тока 8 от минимального до максимального значения и калибровки датчика крутящего момента 28.
Для проведения тарирования используется роликовый (силовой) испытательный стенд. При тарировании измерительное колесо 4 устройства устанавливается на ролики испытательного стенда. Ролики испытательного стенда приводятся в движение моторедуктором стенда, при этом измерительное колесо раскручивается до заданной скорости и ротор генератора постоянного тока вращается в диапазоне рабочей скорости. Усилие, оказываемое измерительным колесо 4 на ролики стенда, регистрируется динамометрическим датчиком стенда, который подключается к свободному входу процессора 20. На пульте управления 23 включается режим тарирования, при этом процессором 20 от импульсов инкрементного датчика 26 формируются импульсы управления Y1, Y2 и фаза f. В процессе тарирования процессором 20 фаза f меняется от минимального до максимального значения (при минимальном значении фаза f равна нулю, при максимальном - фаза f равна периоду Т). На ролики стенда действует момент торможения измерительного колеса 4, то есть действует касательная (тангенциальная) сила, создающая момент сопротивления действию моторедуктора, который передается динамометрическим датчиком стенда. В процессе тарирования в постоянную память процессора 20 записывается: изменение фазы f от минимального до максимального значения и соответствующие ей тормозной момент измерительного колеса 4 и показания датчика крутящего момента 28. Определяется начало пробуксовки измерительного колеса и максимальное значение коэффициента сцепления, чувствительность и быстродействие устройства. Информация результатов тарирования записывается в блок памяти 21 и в формуляр устройства.
Определение коэффициента сцепления (Ксцп.) с поверхностью искусственного покрытия
Перед проведением работы по измерению коэффициента сцепления проводится подготовительная работа: подключается датчик крутящего момента 28 к редуктору коробки передач 6, включается режим «Измерение», переключателями пульта управления 23 в блок памяти 21 вводится предварительная информация. Затем автомобиль-буксировщик набирает скорость Va, равную скорости измерительного колеса 4 при тарировании устройства на силовом стенде.
V=Va,
где V - скорость измерительного колеса 4 при тарировании, м/с;
Va - скорость движения автомобиля-буксировщика, м/с.
Скорость движения автомобиля-буксировщика определяется по скорости вращения ведомого колеса 17.
Va=2πrN,
где r - радиус ведомого колеса, м;
N - число импульсов нулевой отметки второго инкрементного датчика 27 за одну секунду (количество оборотов ведомого колеса 17 за одну секунду).
π - 3,14....
При равенстве скоростей V и Va на дисплее 22 высвечивается сигнал равенства и включается программа определения продольного коэффициента сцепления (Ксцп.) измерительного колеса с поверхностью покрытия. Определение коэффициента сцепления осуществляется в соответствии с программным обеспечением процессора 20. При этом, начиная с минимального значения, фаза f в каждом периоде Т увеличивается, соответственно увеличивается среднее значение напряжения Uн.cp. на активной нагрузке 11, что приводит к увеличению нагрузки на ротор генератора постоянного тока 8 и к увеличению тормозного момента измерительного колеса 4. Фаза f увеличивается до начала пробуксовки измерительного колеса. С появлением пробуксовки фаза f сохраняется постоянной при условии минимального заданного значения пробуксовки, которая определятся заданными значениями Δn и Δt инкрементных датчиков 26 и 27. С появлением пробуксовки сила тормозного момента Рт. измерительного колеса 4 становится равной силе сцепления Рсцп. колеса с поверхностью покрытия.
Рт.=Рсцп.=Рг.·Ксцп.,
где Рг. - нормальная сила нагрузки на измерительное колесо, Н(кг);
Рт. - сила тормозного момента измерительного колеса 4, Н(кг);
Ксцп. - коэффициент сцепления.
При этом сила тормозного момента Рт. измерительного колеса определяется датчиком крутящего момента 28. Результаты измерений датчика 28 поступают в процессор 20, где по полученной информации и результатам тарирования вычисляется коэффициент сцепления колеса с поверхностью покрытия.
Ксцп.=Рсцп./Рг.
Если в процессе проведения измерений состояние поверхности меняется, то есть меняется сила сцепления Рсцп. измерительного колеса с поверхностью покрытия, тогда соответственно меняется и значение его пробуксовки. В этом случае процессор 20, варьируя фазой f, устанавливает заданное минимальное значение пробуксовки, которое определяется заданными значениями Δn и Δt, и сила тормозного момента Рт. и сила сцепления Рсцп. сравняются. При их равенстве с датчика крутящего момента 28 снимается достоверная информация силы тормозного момента Рт., которая в соответствии с данными тарирования устройства используется для вычисления коэффициента сцепления Ксцп.(Фиг.5).
Используя результаты тарирования (определения начала пробуксовки измерительного колеса 4 и его максимальной силы сцепления (Рсцп.мак.)), данное устройство в соответствии с требованием заказчика позволяет определять максимальное значение коэффициента сцепления (Ксцп.мак.).
Для контроля исправности устройства используется сравнительный анализ фазы f и показаний датчика крутящего момента 28, полученных при тарировании и проведении измерений. Качество работы электронного ключа 30 оценивается по огибающей напряжения Uн.cp., полученной ограничителем 29 (фиг.3,е - импульс fk.).
Положительный эффект от реализации предложенного устройства заключается в повышении безопасности при взлете и посадке летательных аппаратов, который обеспечивается повышением достоверности оценки состояния поверхности взлетно-посадочной полосы.
Повысилась точность определения коэффициента сцепления (из устройства исключен измерительный элемент 19), так как на точность показаний измерительного элемента 19 прототипа оказывали влияние вибрация и сопротивление воздуха, а также из показаний измерительного элемента 19 необходимо было вычитать силу сопротивления качению ведомых колес 17.
Повысилась разрешающая способность устройства в определении малоразмерных участков поверхности, имеющих низкий коэффициент сцепления (пятна поверхности с разлитым маслом).
Повысилось качество самоконтроля исправности устройства.
При проведении измерений отсутствует необходимость в относительном скольжении измерительного колеса с его пробуксовкой. Отсутствие пробуксовки увеличивает срок службы измерительного колеса и повышает точность определения коэффициента сцепления.
Исключается смачивание водой поверхности при проведении измерений, что имеет место в известных устройствах. Смачивание поверхности водой ухудшает достоверность оценки состояния покрытия, а в зимнее время вообще невозможно. Предложенное устройство может быть выполнено следующим образом.
В качестве генератора постоянного тока 8 используется генератор ГС-12ТО, но может использоваться и другой тип генератора. Павловский Н.И. «Вспомогательные силовые установки самолетов», М. Транспорт, 1977 г.
Регулятор напряжения 9 - угольный регулятор напряжения, тип РН-180 м, входит в комплект генератора постоянного тока.
Процессор 20 выполнен на базе микроконтроллера семейства PIC 18. Описание - авторы Б.Я.Прохоренко и др. изд. М. ДОДЭЕА, 1999 г.
Блок памяти 21 выполнен на микросхемах энергонезависимой памяти фирмы ATMEL, автор описания В.В.Гребнев, изд. Санкт-Петербург, ЭФО, 1977 г.
Дисплей 22 - цифровой микрокристаллический дисплей фирмы PLANAR.
Измерительное колесо 4 - авиационное шасси.
Ведомые колеса 17 - автомобильные шасси.
Инкрементные датчики 26 и 27 - импульсные (пошаговые) энкодеры фирмы CORRSYS-DATRON.
Датчик крутящего момента 28 - тип М28, может монтироваться в измерительное колесо 4.
Ограничитель 29 выполняется на транзисторе или микросхеме.
Электронный ключ 30 выполнен на тиристорах (Фиг.4).
Устройство содержит измерительную тележку и блок регистрации. Измерительная тележка содержит независимый груз, измерительное колесо, коробку передач, муфту свободного хода, генератор постоянного тока, регулятор напряжения, активную нагрузку, ведомые колеса и раму измерительной тележки. Независимый груз соединен с измерительным колесом. Коробка передач через муфту свободного хода механически соединена с ротором генератора постоянного тока, силовой выход которого через регулятор напряжения подключен к входу генератора постоянного тока, являющегося входом его обмотки возбуждения. Блок регистрации содержит процессор, блок памяти, дисплей и пульт управления. Порт входа/выхода процессора подключен к блоку памяти, пульт управления подключен к первому входу процессора, первый выход которого соединен с дисплеем. При этом второй вход процессора предусмотрен для подключения динамометра испытательного стенда при тарировании устройства, а второй его выход предусмотрен для подключения внешних устройств. Дополнительно устройство содержит первый и второй инкрементные датчики, датчик крутящего момента, ограничитель, электронный ключ и блок формирования импульсов управления. Измерительное колесо через датчик крутящего момента механически соединено с коробкой передач. Измерительное и одно из ведомых колес механически соответственно соединены с первым и вторым инкрементными датчиками. Силовая шина генератора постоянного тока через активную нагрузку подключена к входу электронного ключа, второй и третий входы которого соединены с первым и вторым выходами блока формирования импульсов управления. Измерительная тележка гибким кабелем соединена с блоком регистрации, при этом первый и второй инкрементные датчики, датчик крутящего момента и ограничитель подключены соответственно к третьему, четвертому, пятому и шестому входам процессора, третий и четвертый выходы которого соединены с первым и вторым входами блока формирования импульсов управления. Устройство обеспечивает повышение точности измерения коэффициента сцепления. 5 ил.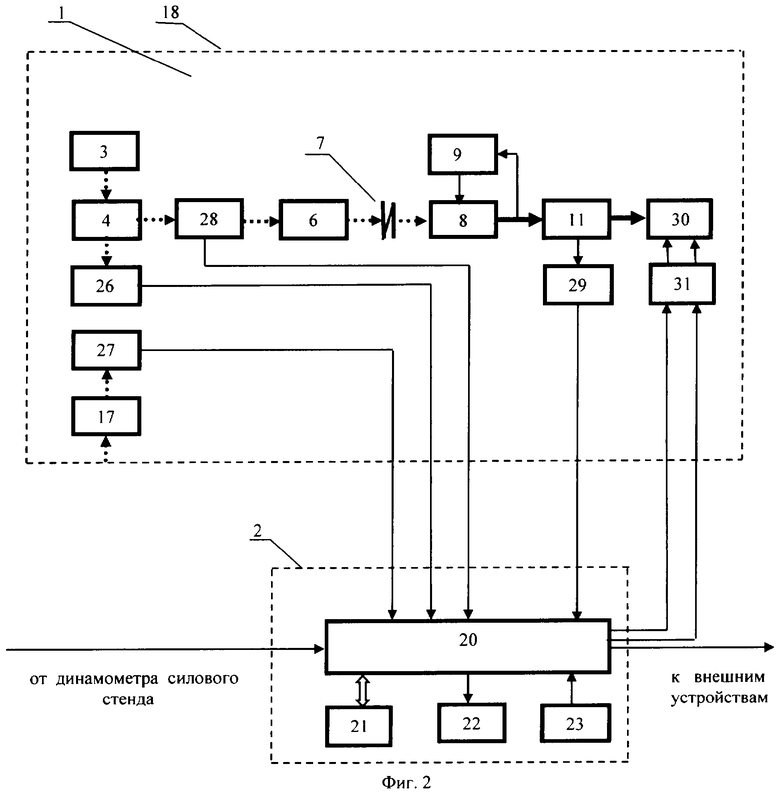
Устройство для определения коэффициента сцепления колеса с поверхностью аэродромного покрытия, содержащее измерительную тележку и блок регистрации, измерительная тележка содержит независимый груз, измерительное колесо, коробку передач, муфту свободного хода, генератор постоянного тока, регулятор напряжения, активную нагрузку, ведомые колеса и раму измерительной тележки, при этом независимый груз нормально соединен с измерительным колесом, коробка передач через муфту свободного хода механически соединена с ротором генератора постоянного тока, силовой выход которого через регулятор напряжения подключен к входу генератора постоянного тока, являющегося входом его обмотки возбуждения, ведомые колеса соединены с рамой измерительной тележки, блок регистрации содержит процессор, блок памяти, дисплей и пульт управления, причем порт входа/выхода процессора подключен к блоку памяти, пульт управления подключен к первому входу процессора, первый выход которого соединен с дисплеем, при этом второй свободный вход процессора предусмотрен для подключения динамометра силового стенда (при проведении тарирования устройства), а второй его свободный выход предусмотрен для подключения внешних устройств,
отличающееся тем, что измерительная тележка дополнительно содержит первый и второй инкрементные датчики, датчик крутящего момента, ограничитель, электронный ключ и блок формирования импульсов управления, при этом измерительное колесо через датчик крутящего момента механически соединено с коробкой передач, измерительное и одно из ведомых колес механически соответственно соединены с первым и вторым инкрементными датчиками, а силовая шина генератора постоянного тока через активную нагрузку подключена к входу электронного ключа, второй и третий входы которого соединены с первым и вторым выходами блока формирования импульсов управления, причем измерительная тележка гибким кабелем соединена с блоком регистрации, при этом первый и второй инкрементные датчики, датчик крутящего момента и ограничитель подключены соответственно к третьему, четвертому, пятому и шестому входам процессора, третий и четвертый выходы которого соединены с первым и вторым входами блока формирования импульсов управления, при этом значение коэффициента сцепления (Ксцп.) вычисляется путем измерения силы продольного сцепления (Рсцп.) измерительного колеса с поверхностью покрытия, получаемой при работе генератора постоянного тока в генераторном режиме, когда механическая сила сцепления измерительного колеса, в соответствии с заданным значением его пробуксовки, превращается в электрическую и выделяется в виде тепловой энергии в блоке активной нагрузки, при этом коэффициент сцепления вычисляется по формуле
Ксцп.=Рсцп./Рг,
где Ксцп. - значение коэффициента сцепления;
Рсцп. - продольная сила сцепления измерительного колеса с поверхностью покрытия, Н(кг);
Рг - нормальная сила нагрузки на измерительное колесо, Н(кг).
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА СЦЕПЛЕНИЯ КОЛЕСА С АЭРОДРОМНЫМ ПОКРЫТИЕМ | 2004 |
|
RU2259569C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КОЭФФИЦИЕНТА СЦЕПЛЕНИЯ АЭРОДРОМНОГО И ДОРОЖНОГО ПОКРЫТИЙ | 1996 |
|
RU2112829C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КОЭФФИЦИЕНТА СЦЕПЛЕНИЯ КОЛЕСА ТРАНСПОРТНОГО СРЕДСТВА, ИМЕЮЩЕГО ПОСТОЯННУЮ СТЕПЕНЬ СКОЛЬЖЕНИЯ, С ПОВЕРХНОСТЬЮ ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ | 2000 |
|
RU2165610C1 |
| ЕР 0227003 А3, 01.07.1987. | |||

